ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Эта заявка на патент испрашивает приоритет совместной заявки на патент США № 15/897,814 (реестровый № 20151-2162), поданной 15 февраля 2018 года, озаглавленной «SYSTEMS AND METHODS FOR TRANSMITTING DATA VIA A CONTACTLESS CYLINDRICAL INTERFACE» («Системы и способы для передачи данных посредством бесконтактного цилиндрического интерфейса»), указывающей Pravin Kumar Venkatesan, Abhilash Goyal, William B Etheridge, Rajesh Ramalingam Varadharajan в качестве авторов изобретения, причем этот патентный документ включен в эту заявку по ссылке во всей своей полноте и во всех отношениях.
УРОВЕНЬ ТЕХНИКИ
А. Область техники
[0002] Настоящее раскрытие относится, в общем, к системам и способам для передачи данных посредством емкостной связи и, более конкретно, к использованию поворотной конденсаторной линии передачи данных в системе светового обнаружения и измерения дальности (light detection and ranging system - LIDAR, лидар).
В. Уровень техники
[0003] В некоторых электронных системах может быть требование передавать данные в электронной системе беспроводным или неконтактным (бесконтактным) способом. Возможные беспроводные или бесконтактные способы могут включать в себя беспроводную технологию, оптическую линию связи, ртутный электрический контакт, индуктивную связь и емкостную связь. Термин «емкостная» относится к электрической емкости или свойству, состоящему в способности накапливать и удерживать заряд электричества. Выбранный способ может влиять на производительность и эффективность электронной системы, в том числе, но не только, на частоту работы, ширину полосы частот, скорость передачи и энергопотребление. В некоторых вариантах осуществления, таких как лидарная система, данные могут передаваться между стационарным компонентом и нестационарным поворотным компонентом.
[0004] Соответственно, необходимы системы и способы, которые обеспечивают эффективный беспроводной или бесконтактный способ передачи данных между одним компонентом электронной системы и остальной частью электронной системы. Этот один компонент электронной системы может быть стационарным относительно остальной части электронной системы. Или этот один компонент электронной системы может быть поворотным относительно остальной части электронной системы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0005] Ссылки будут делаться на варианты осуществления настоящего изобретения, примеры которых могут быть показаны в сопутствующих фигурах. Предполагается, что эти фигуры являются иллюстративными, а не ограничивающими. Хотя настоящее изобретение, в общем, описано в контексте этих вариантов осуществления, следует понимать, что предполагается, что объем настоящего изобретения не ограничен этими конкретными вариантами осуществления. Компоненты на фигурах приведены не в масштабе.
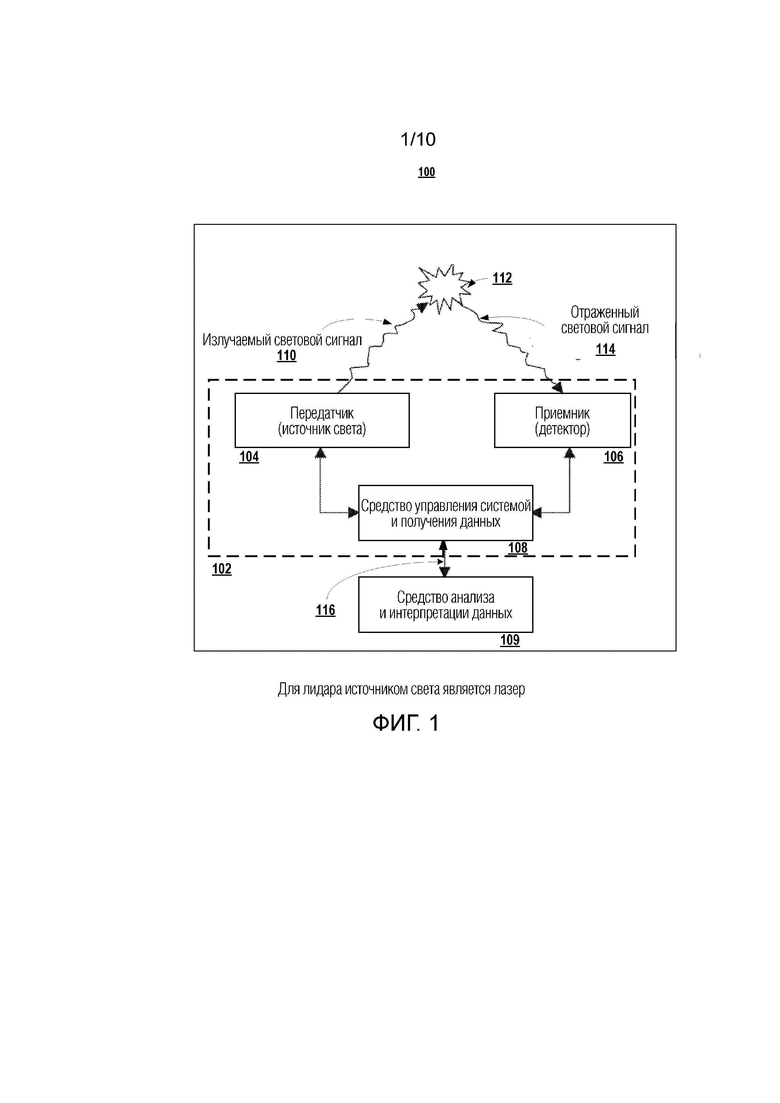
[0006] Фигура («Фиг.») 1 показывает функционирование системы светового обнаружения и измерения дальности согласно вариантам осуществления настоящего документа.
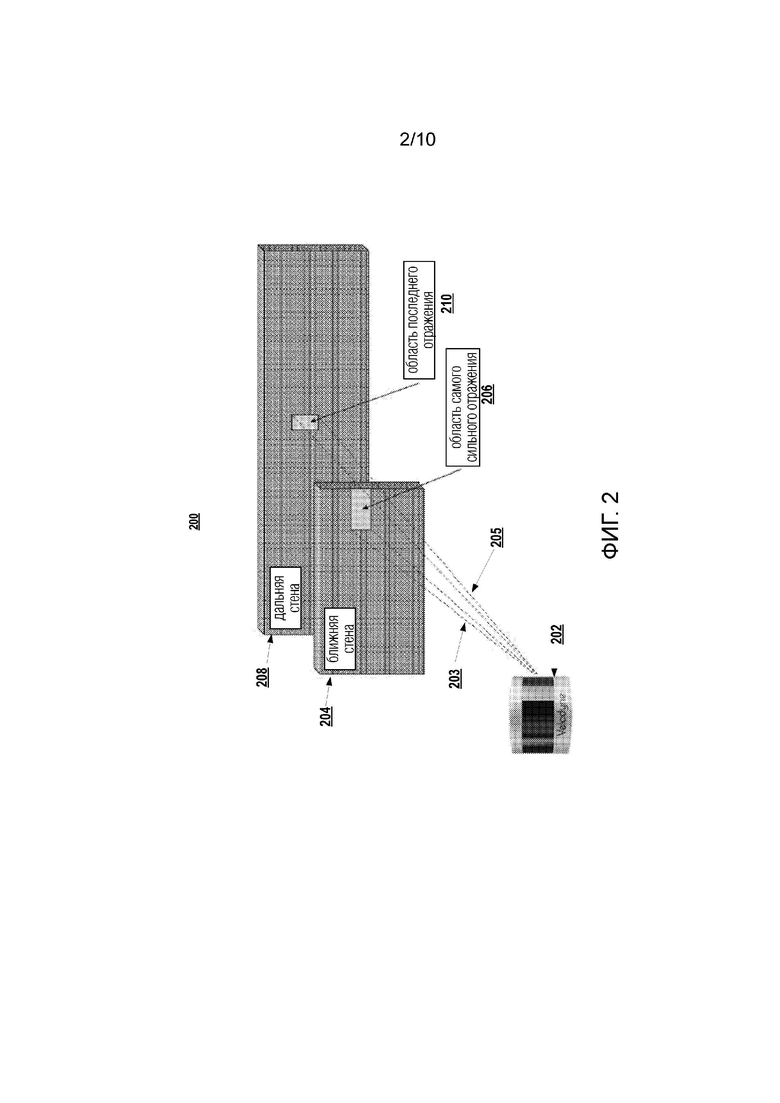
[0007] Фиг. 2 показывает функционирование системы светового обнаружения и измерения дальности и множественные отраженные световые сигналы согласно вариантам осуществления настоящего документа.
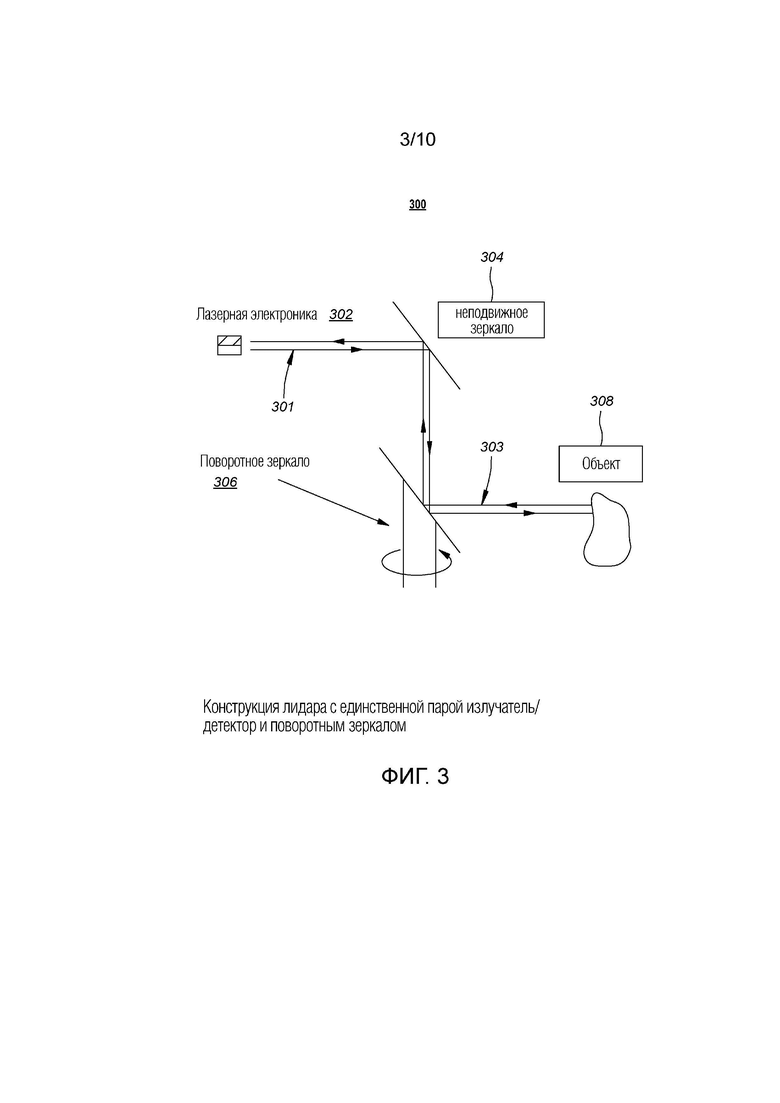
[0008] Фиг. 3 показывает лидарную систему с поворотным зеркалом согласно вариантам осуществления настоящего документа.
[0009] Фиг. 4А показывает концентрическую цилиндрическую емкость согласно вариантам осуществления настоящего документа.
[0010] Фиг. 4В показывает емкостную линию связи между приемником и приемопередатчиком согласно вариантам осуществления настоящего документа.
[0011] Фиг. 5А показывает конструкцию вал-ротор ротора и вала согласно вариантам осуществления настоящего документа.
[0012] Фиг. 5В показывает две емкостные линии связи, обеспечивающие однонаправленную дифференциальную сигнализацию согласно вариантам осуществления настоящего документа.
[0013] Фиг. 6 показывает блок-схему последовательности операций для создания емкостных линий связи согласно вариантам осуществления настоящего документа.
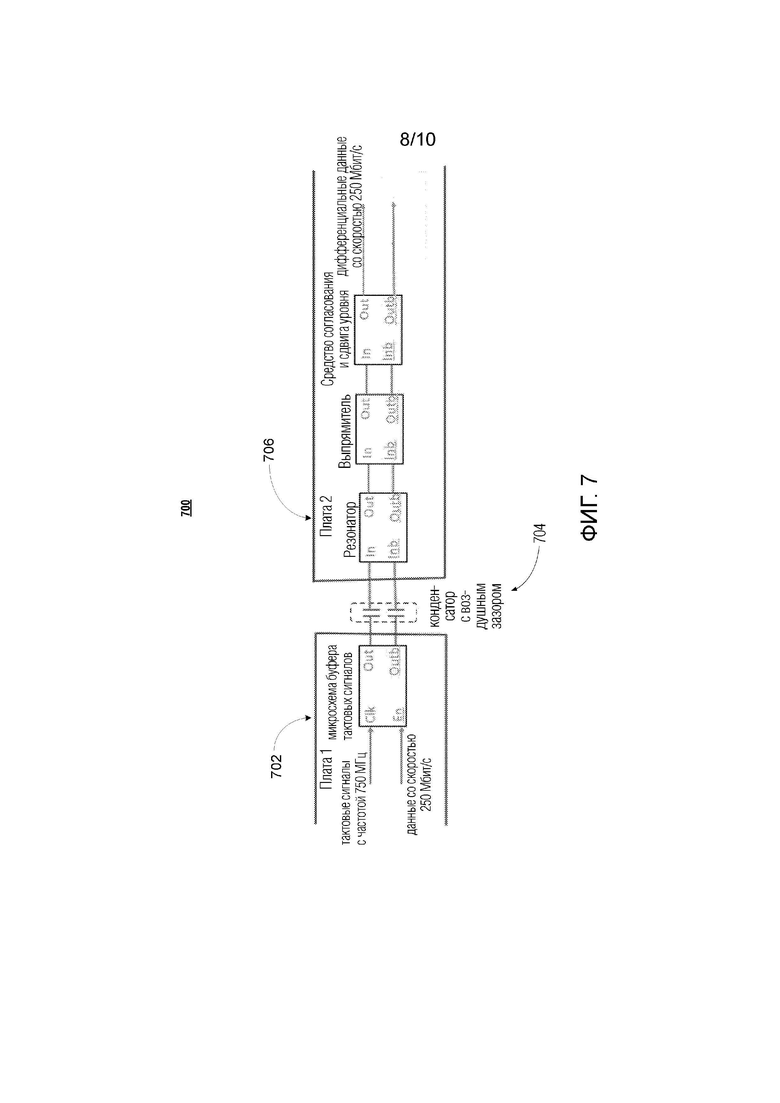
[0014] Фиг. 7 показывает систему для реализации емкостной линии связи с заказными протоколами согласно вариантам осуществления настоящего документа.
[0015] Фиг. 8 показывает другую систему для реализации емкостной линии связи с заказными протоколами согласно вариантам осуществления настоящего раскрытия.
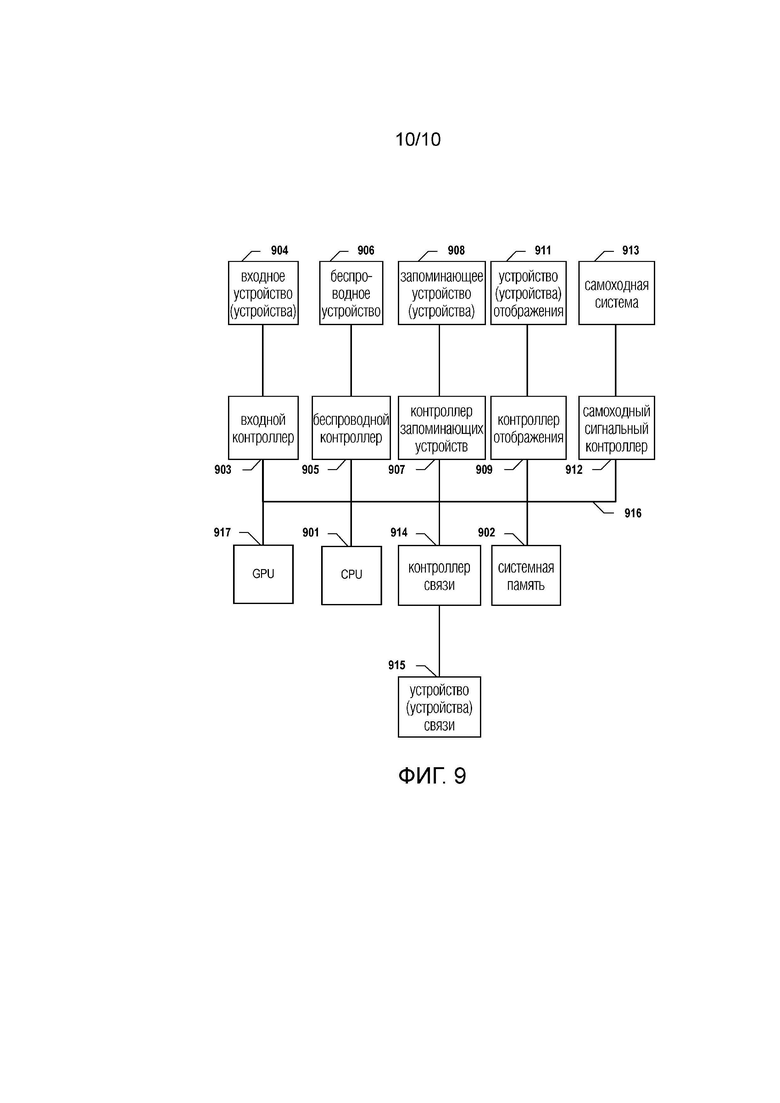
[0016] Фиг. 9 показывает упрощенную блок-схему вычислительного устройства/ системы обработки информации согласно вариантам осуществления настоящего документа.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0017] В нижеследующем описании, в целях объяснения, конкретные подробности изложены для обеспечения понимания настоящего изобретения. Однако специалистам в данной области техники будет понятно, что настоящее изобретение может быть применено на практике без этих подробностей. Дополнительно, специалистам в данной области техники будет понятно, что варианты осуществления настоящего изобретения, описанные ниже, могут быть реализованы многими путями, например, в виде процесса, аппаратуры, системы, устройства, или способа на материальном компьютерно-читаемом носителе данных.
[0018] Компоненты или модули, показанные на диаграммах, являются иллюстративным компонентами или модулями иллюстративных вариантов осуществления настоящего изобретения и предназначены для разъяснения настоящего изобретения. Следует также понимать, что на протяжении этого описания компоненты могут быть описаны как отдельные функциональные блоки, которые могут содержать подблоки, но специалистам в данной области техники будет понятно, что различные компоненты или их части могут быть подразделены на отдельные компоненты или могут быть объединены вместе, в том числе встроены в единую систему или компонент. Следует отметить, что функции или операции, описанные здесь, могут быть реализованы в виде компонентов. Компоненты могут быть реализованы в программных средствах, аппаратных средствах, или в их комбинации.
[0019] Дополнительно, предполагается, что соединения между компонентами или системами на фигурах не ограничены прямыми соединениями. Напротив, передача данных между этими компонентами может быть модифицирована, переформатирована, или иным образом изменена промежуточными компонентами. Также, могут быть использованы дополнительные соединения или меньшее число соединений. Следует также отметить, что следует понимать, что термин «связан», «соединен», или «коммуникационно связан» включают в себя прямые соединения, непрямые соединения через одно или более промежуточных устройств, и беспроводные соединения.
[0020] Ссылка в описании изобретения на «один вариант осуществления», «предпочтительный вариант осуществления», «некоторый вариант осуществления» или «варианты осуществления» означает, что конкретный признак, конструкция, характеристика, или функция, описанная в связи с вариантом осуществления, включена по меньшей мере в один вариант осуществления настоящего изобретения и может быть более чем в одном варианте осуществления. Также, появление вышеупомянутых фраз в различных местах в описании изобретения не обязательно всегда относится к одному и тому же варианту осуществления или вариантам осуществления.
[0021] Использование некоторых терминов в различных местах в описании изобретения предназначено для иллюстрации и не должно толковаться как ограничение. Услуга, функция, или ресурс не ограничены единственной услугой, функцией, или ресурсом; использование этих терминов может относиться к группе связанных услуг, функций, или ресурсов, которые могут быть распределены или агрегированы.
[0022] Следует понимать, что термины «включать в себя», «включающий в себя», «содержать» и «содержащий» являются открытыми терминами, и любые перечисления, которые следуют за ними, являются примерами и не ограничены перечисленными элементами. Любые заголовки, используемые здесь, приведены только в организационных целях и не должны использоваться для ограничения объема описания или формулы изобретения. Каждая ссылка, упомянутая в этом патентном документе, включена в этот патентный документ по ссылке во всей своей полноте.
[0023] Дополнительно, специалистам в данной области техники будет понятно, что: (1) некоторые этапы могут не выполняться; (2) этапы могут не ограничиваться конкретным порядком, изложенным здесь; (3) некоторые этапы могут быть выполнены в отличных порядках; и (4) некоторые этапы могут быть выполнены одновременно.
А. Система светового обнаружения и измерения дальности
[0024] Система светового обнаружения и измерения дальности, такая как лидарная система, может быть инструментом для измерения формы и контура среды, окружающей систему. Лидарные системы могут быть использованы в многочисленных применениях, включающих в себя как автономную навигацию, так и аэросъемку поверхности. Лидарные системы излучают световой импульс, который затем отражается от объекта в среде, в которой система функционирует. Время, которое проходит от момента излучения до момента приема каждого импульса (т.е., время распространения сигнала (time-of-flight - TOF)), может измеряться для определения расстояния между объектом и лидарной системой. Эта теория основана на физике света и оптике.
[0025] В лидарной системе, свет может излучаться из быстро стреляющего лазера. Лазерный свет проходит через среду и отражается от точек предметов в среде, таких как здания, ветви деревьев и транспортные средства. Энергия отраженного света возвращается в приемник (детектор) лидара, где он записывается и используется для отображения среды.
[0026] Фиг. 1 показывает функционирование 100 компонентов 102 светового обнаружения и измерения дальности и средства 109 анализа и интерпретации данных согласно вариантам осуществления настоящего документа. Компоненты 102 светового обнаружения и измерения дальности могут содержать передатчик 104, который передает излучаемый световой сигнал 110, приемник 106, содержащий детектор, и средство 108 управления системой и получения данных. Излучаемый световой сигнал 110 распространяется через среду и отражается от объекта 112. Отраженный световой сигнал 114 распространяется через среду и принимается приемником 106. Средство 108 управления системой и получения данных может управлять излучением света передатчиком 104, и это средство получения данных может записывать отраженный световой сигнал 114, детектированный приемником 106. Средство 109 анализа и интерпретации данных может принимать выходные данные посредством соединения 116 от средства 108 управления системой и получения данных и выполнять функции анализа данных. Соединение 116 может быть реализовано способом беспроводной или бесконтактной связи. Передатчик 104 и приемник 106 могут включать в себя оптическую линзу (не показана). Передатчик 104 может излучать лазерный луч, имеющий множество импульсов в конкретной последовательности. В некоторых вариантах осуществления, компоненты 102 светового обнаружения и измерения дальности и средство 109 анализа и интерпретации данных содержат лидарную систему.
[0027] Фиг. 2 показывает функционирование 200 системы 202 светового обнаружения и измерения дальности, включающей в себя множественные отраженные световые сигналы: (1) отраженный сигнал 203 и (2) отраженный сигнал 205, согласно вариантам осуществления настоящего документа. Система 202 светового обнаружения и измерения дальности может быть лидарной системой. Вследствие расходимости лазерного луча, один лазерный выстрел часто поражает множественные объекты, создавая множественные отраженные сигналы. Система 202 светового обнаружения и измерения дальности может анализировать множественные отраженные сигналы и может сообщать либо о самом сильном отраженном сигнале, либо о последнем отраженном сигнале, либо об обоих отраженных сигналах. На фиг. 2, система 202 светового обнаружения и измерения дальности испускает лазерное излучение в направлении ближней стены 204 и дальней стены 208. Как показано, большая часть луча поражает ближнюю стену 204 в области 206, результатом чего является отраженный сигнал 203, а другая часть луча поражает дальнюю стену 208 в области 210, результатом чего является отраженный сигнал 205. Отраженный сигнал 203 может иметь меньшее TOF и больший уровень принимаемого сигнала по сравнению с отраженным сигналом 205. Система 202 светового обнаружения и измерения дальности может записывать оба отраженных сигнала только тогда, когда расстояние между двумя объектами больше минимального расстояния. Как в лидарной системе с единственным отраженным сигналом, так и в лидарной системе с множественными отраженными сигналами, важно, чтобы отраженный сигнал был точно связан с передаваемым световым сигналом для точного вычисления TOF.
[0028] Некоторые варианты осуществления лидарной системы могут получать данные о расстоянии в режиме двумерного (2-D) (т.е., одноплоскостного) точечного облака. Эти лидарные системы могут во многих случаях использоваться в промышленных применениях и во многих случаях могут переориентироваться на разведку, картографирование, автономную навигацию и другие применения. Некоторые варианты осуществления этих устройств основаны на использовании единственной пары излучатель/детектор, объединенной с подвижным зеркалом некоторого типа для осуществления сканирования в пределах по меньшей мере одной плоскости. Это зеркало не только отражает свет, излучаемый от диода, но и отражает отраженный свет в детектор. Использование поворотного зеркала в этом применении может быть средством для достижения азимутального вида на 90-180 - 360 градусов при упрощении как конструкции, так и технологичности системы.
[0029] Фиг. 3 показывает лидарную систему 300 с поворотным зеркалом согласно вариантам осуществления настоящего документа. Лидарная система 300 использует единственный лазерный излучатель/детектор, объединенный с поворотным зеркалом для эффективного сканирования в пределах плоскости. Измерения расстояния, выполняемые такой системой, являются по существу двумерными (т.е., планарными), и захватываемые точки расстояния воспроизводятся в виде двумерного (2-D) (т.е., одноплоскостного) точечного облака. В некоторых вариантах осуществления, не без ограничений, поворотные зеркала поворачиваются с очень высокими скоростями, например, тысячи оборотов в минуту. Поворотное зеркало может также называться вращающимся зеркалом.
[0030] Лидарная система 300 содержит лазерную электронику 302, которая содержит единственный излучатель света и детектор света. Излучаемый лазерный сигнал 301 может быть направлен на неподвижное зеркало 304, которое отражает излучаемый лазерный сигнал 301 на поворотное зеркало 306. Когда поворотное зеркало 306 «поворачивается», излучаемый лазерный сигнал 301 может отражаться от объекта 308 на пути его распространения. Отраженный сигнал 303 может попадать на детектор в лазерной электронике 302 через поворотное зеркало 306 и неподвижное зеркало 304.
[0031] Как отмечено выше, время распространения сигнала или TOF является средством, которое использует лидарная система для отображения среды и обеспечения жизнеспособной и подтвержденной технологии, используемой для детектирования целевых объектов. Одновременно, когда лазеры производят выстрелы, аппаратно-программное средство внутри лидарной системы может анализировать и измерять принимаемые данные. Оптическая приемная линза внутри лидарной системы действует подобно телескопу, собирая фрагменты фотонов света, возвращающихся из среды. Чем больше лазеров используется в системе, тем больше информации о среде может быть собрано. Лидарные системы с единственным лазером могут быть в невыгодном положении по сравнению с системами с множественными лазерами, поскольку может быть получено меньше фотонов и, таким образом, меньше информации. Некоторые варианты осуществления, но без ограничения, лидарных систем были реализованы с 8, 16, 32, 64 и 128 лазерами. Также, некоторые варианты осуществления лидаров, но без ограничения, могут использовать вертикальное поле зрения (field of view - FOV) вплоть до 120 градусов с интервалом между лазерными лучами, сжатым до 0,1 градуса, и могут иметь частоты вращения 5-20 оборотов в секунду.
[0032] Функциональность поворотного зеркала может быть также реализована с использованием твердотельной технологии, такой как MEMS.
В. Конденсаторная связь
[0033] В некоторых электронных системах, таких как лидарная система, может быть требование передавать данные внутри электронной системы беспроводным или бесконтактным способом. Альтернативные беспроводные или бесконтактные способы могут включать в себя беспроводную технологию, ртутные электрические контакты, оптические линии связи, индуктивную связь и емкостную связь. При анализе характеристик этих альтернатив, емкостная связь может иметь преимущества. Например, в отличие от емкостной связи, беспроводные технологии могут требовать от 30 до 40 раз большей мощности и могут быть более дорогими; емкостная связь может обеспечить только 1/10 частоты передачи; ртутные электрические контакты могут быть непригодными для самоходных применений, и оптическая связь ограничена одной линией связи для передачи данных. За исключением оптической связи, упомянутые альтернативы могут иметь меньшую скорость передачи данных, чем у емкостной связи.
[0034] В некоторых вариантах осуществления, со ссылкой на лидарную систему фиг. 1, компоненты 102 светового обнаружения и измерения дальности могут быть расположены на роторе, и средство 109 анализа и интерпретации данных может быть расположено на вале, который вставлен в центр ротора. При функционировании, ротор поворачивается вокруг вала, причем между ротором и валом находится конденсатор с воздушным зазором. Эта конструкция требует беспроводного или бесконтактного соединения. Конденсатор с воздушным зазором обеспечивает емкостную линию связи, т.е., соединение 116, между компонентами 102 светового обнаружения и измерения дальности и средством 109 анализа и интерпретации данных. В некоторых других вариантах осуществления, часть функций анализа данных может быть расположена на роторе.
[0035] Индуктивная связь может быть функциональным решением для обеспечения передачи данных и передачи энергии между компонентами 102 светового обнаружения и измерения дальности и средством 109 анализа и интерпретации данных. Два проводника называются индуктивно связанными или магнитно связанными, когда они сконфигурированы таким образом, что изменение электрического тока, протекающего через один провод, вызывает напряжение на концах другого провода вследствие электромагнитной индукции. Величина индуктивной связи между двумя проводниками измеряется посредством их взаимной индуктивности. Напряжение на индукторе пропорционально скорости изменения прикладываемого напряжения, но отстает от нее по фазе, а не опережает ее. Индуктивная связь может генерировать нежелательные паразитные колебания, которые могут ограничивать частоту передачи. Как отмечено выше, индуктивная связь может обеспечить меньшую скорость передачи данных по сравнению с емкостной связью.
[0036] Емкость является соотношением между изменением электрического заряда в системе и соответствующим изменением ее электрического потенциала. А именно, электрическое поле вызывает перемещение зарядов в проводниках по направлению к зазору между проводниками. Простой конденсатор включает в себя две обкладки, разделенные изолирующим зазором. Изолирующий зазор может быть воздушным зазором. Когда напряжение прикладывается к выводам конденсатора, электроны перемещаются от одной обкладки к другой, оставляя одну обкладку положительно заряженной, а другую обкладку отрицательно заряженной. Электрический ток в конденсаторе пропорционален скорости изменения напряжения и опережает напряжение по фазе, когда подается переменный ток (АС).
[0037] Емкостная связь является средством передачи переменных электрических сигналов или энергии из одного сегмента цепи в другой с использованием конденсатора. Эта связь обеспечивает среду для сигналов переменного тока и при этом блокирует энергию постоянного тока. Емкостная связь может также называться АС-связью и может быть использована в цифровых цепях для передачи цифровых сигналов с нулевой постоянной (DC) составляющей, известных как симметричные по постоянному току сигналы. Симметричные по постоянному току формы волн могут быть пригодны в системах связи, поскольку они могут быть использованы вместо связанных по переменному току электрических соединений для предотвращения проблем с дисбалансом напряжения и накопления заряда между связанными системами или компонентами. Большинство кодов модемных линий выполнено с возможностью создавать симметричные по постоянному току формы волн, включающие в себя униполярное, полярное, биполярное, и манчестерское кодирование/декодирование.
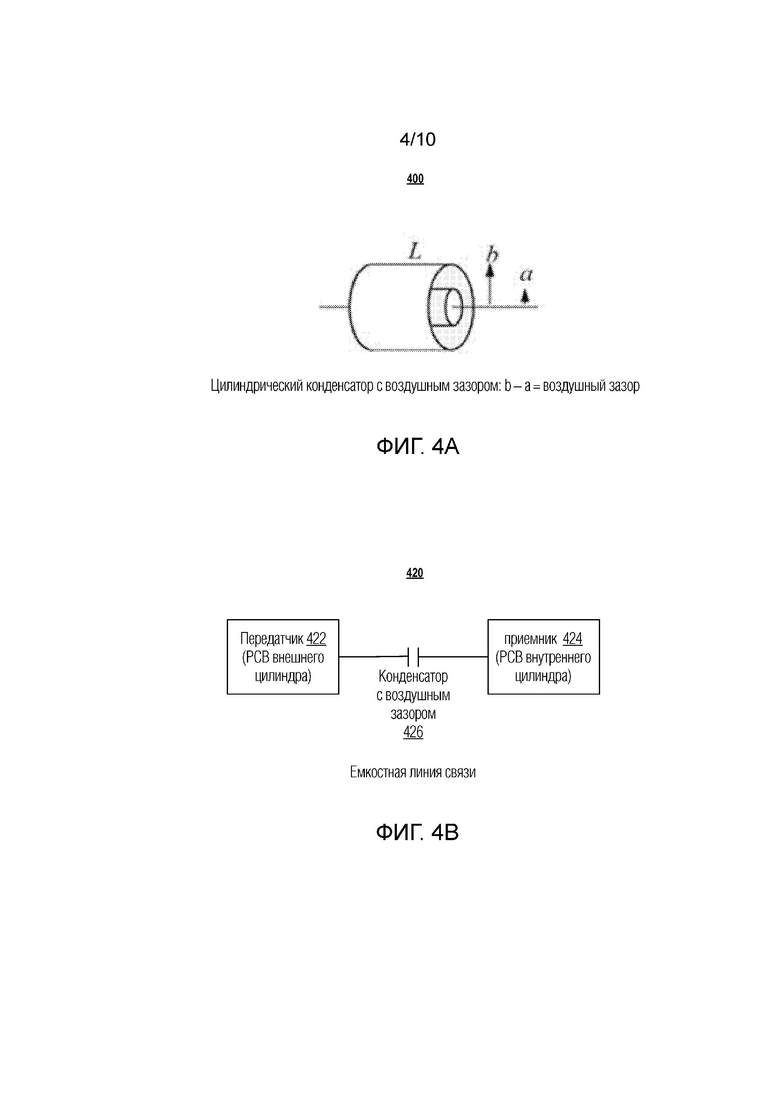
[0038] Фиг. 4А показывает концентрическую цилиндрическую емкость 400 согласно вариантам осуществления настоящего документа. Концентрическая цилиндрическая емкость 400 может содержать два концентрических цилиндра, где a=радиус внутреннего цилиндра, b=радиус внешнего цилиндра L=длина обоих цилиндров. Воздушный зазор емкости равен b - a. Емкость двух концентрических цилиндров вычисляется следующим образом:
где ε0 является диэлектрической постоянной по воздуху, и εr является относительной диэлектрической проницаемостью.
[0039] Концентрическая цилиндрическая емкость 400 сохраняет свое значение, если внешний цилиндр поворачивается вокруг стационарного внутреннего цилиндра, или наоборот.
[0040] Фиг. 4В показывает емкостную линию 420 связи между приемником 424 и передатчиком 422 согласно вариантам осуществления настоящего документа. Как показано, передатчик 422 может быть компонентом печатной платы (printed circuit board - PCB), расположенной на внешнем цилиндре концентрического цилиндра, например, концентрического цилиндра 400. Приемник 424 может быть компонентом PCB, расположенной на внутреннем цилиндре концентрического цилиндра, например, концентрического цилиндра 400. Передатчик 422 и приемник 424 могут иметь конденсаторную связь через конденсатор 426 с воздушным зазором, в результате чего создается емкостная линия связи между приемником 424 и передатчиком 422. PCB внешнего цилиндра может поворачиваться вокруг PCB стационарного внутреннего цилиндра, или наоборот.
[0041] Фиг. 4В показывает емкостную линию связи, поддерживаемую конденсатором 426 с воздушным зазором. Эта емкостная линия связи поддерживает единственный канал связи. Если необходимы дополнительные каналы связи, то могут потребоваться дополнительные конденсаторы с воздушным зазором. Например, два конденсатора 426 с воздушным зазором могут обеспечить два канала связи и могут поддерживать либо двунаправленную, либо дифференциальную сигнализацию. Отсюда следует, что четыре конденсатора 426 с воздушным зазором могут обеспечить четыре канала связи и могут поддерживать двунаправленную дифференциальную сигнализацию.
С. Емкостная линия связи
[0042] Некоторые варианты осуществления бесконтактной связи между компонентами в системе могут быть основаны на индуктивной связи. Поворотная балка и неподвижная балка могут иметь два соединения индуктивной связи, одно для передачи данных и одно для питания энергией другого устройства. Два соединения индуктивной связи в дифференциальном режиме могут обеспечивать улучшенную целостность сигнала по сравнению с единственной индуктивной линией связи. Улучшенная целостность сигнала означает, что сигнал передается между двумя точками с улучшенными (т.е., уменьшенными) искажениями и ослаблением сигнала.
[0043] Настоящие документы определяют способы и устройство, которые используют емкостную связь для замены индуктивной связи для обеспечения более быстрой передачи данных. Один индуктор может быть заменен двумя конденсаторами для поддержки дифференциальной сигнализации. Эффективные скорости передачи данных могут составлять 1 Гбит/с. С развитием конструкции, будущие скорости передачи данных могут составлять 10 Гбит/с. Эти способы и устройство основаны на использовании воздушного зазора между поворотной электродной обкладкой и неподвижной электродной обкладкой для создания емкостной линии связи между одной PCB и другой PCB системы. В некоторых вариантах осуществления бесконтактных линий связи, данные могут передаваться с использованием емкостной линии связи, а энергия может передаваться с использованием индуктивной связи. Специальный путь (емкостная линия связи) для передачи данных может предотвратить шум, связанный с передачей энергии, для обеспечения подавления помех.
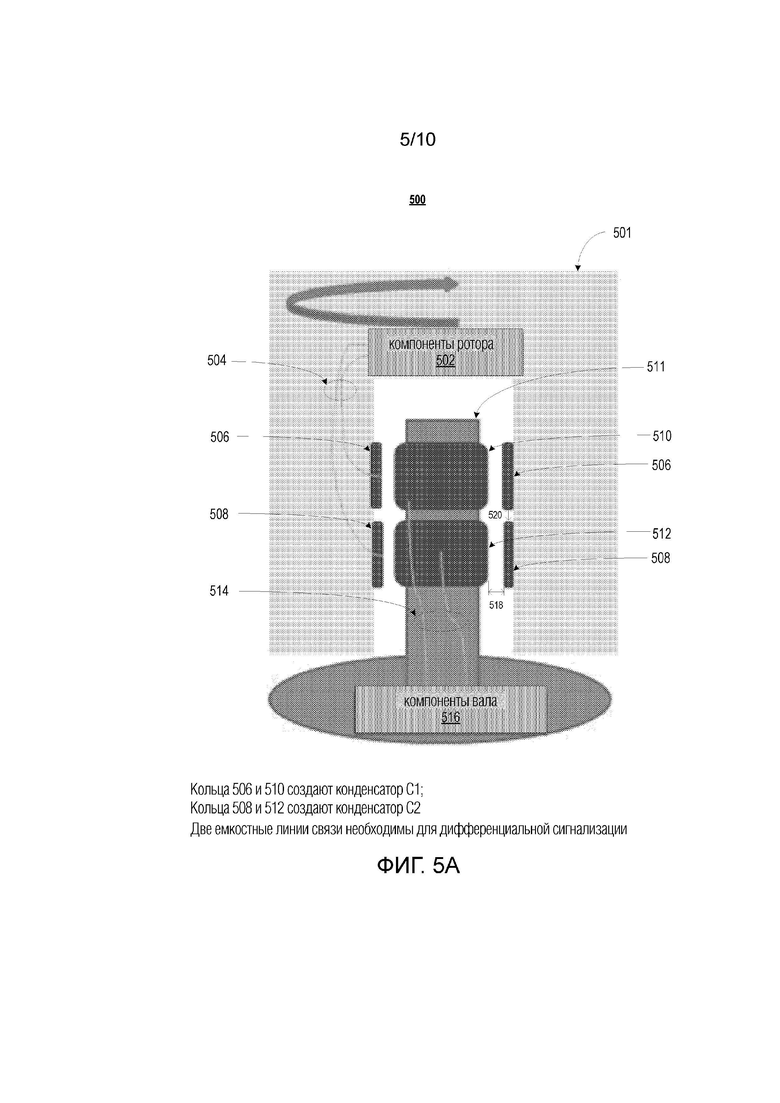
[0044] Фиг. 5А показывает конструкцию 500 ротор-вал ротора 501 и вала 511 согласно вариантам осуществления настоящего документа. Ротор 501 может иметь цилиндрическую форму и может содержать цилиндрическое отверстие в центре ротора 501. Вал 511 может быть расположен внутри цилиндрического отверстия. Как показано, ротор 501 поворачивается вокруг вала 511. Эти компоненты могут быть включены в лидарную систему. Ротор 501 может содержать компоненты 502 ротора, и вал 511 может содержать компоненты 526 вала. Компоненты 502 ротора включают в себя верхнюю PCB, и компоненты 526 вала включают в себя нижнюю PCB. В некоторых вариантах осуществления, компоненты 502 ротора могут содержать компоненты 102 светового обнаружения и измерения дальности, и компоненты 526 вала могут содержать средство 109 анализа и интерпретации данных фиг. 1.
[0045] С компонентами 502 ротора через соединения 504 связаны кольцо 506 и кольцо 508. Кольцо 506 и кольцо 508 являются круговыми лентами, расположенными на внутренней поверхности ротора 501, и обеспечивают функциональность электродной обкладки для одной стороны конденсатора с воздушным зазором. С компонентами 516 вала через соединения 514 связаны кольцо 510 и кольцо 512. Кольцо 510 и кольцо 512 являются круговыми лентами, расположенными на внешней поверхности вала 511, и обеспечивают функциональность электродной обкладки для другой стороны конденсатора с воздушным зазором. Конденсатор С1 может быть создан на основе пространства между кольцом 506 и кольцом 510. Другой конденсатор С2 может быть создан на основе пространства между кольцом 508 и кольцом 512. Емкость вышеупомянутых конденсаторов может быть определена, отчасти, воздушным зазором 518 и шириной емкостных колец 506, 508, 510 и 512. Кольцо 506 и кольцо 508 являются кольцами ротора, и кольцо 510 и кольцо 512 являются кольцами вала.
[0046] Кольцо 506 и кольцо 510 являются компонентами электродных обкладок конденсатора С1, и кольцо 508 и кольцо 512 являются компонентами электродных обкладок конденсатора С2. Вертикальный зазор 520 между кольцом 506 и кольцом 508 может влиять на производительность емкостной линии связи между конденсатором С1 и конденсатором С2, поскольку величина вертикального зазора 520 может определять уровень помех между двумя конденсаторами. Специалистам в данной области техники будет понятно, что каждый из ротора 501 и вала 511 может содержать N колец, которые могут поддерживать N емкостных линий связи.
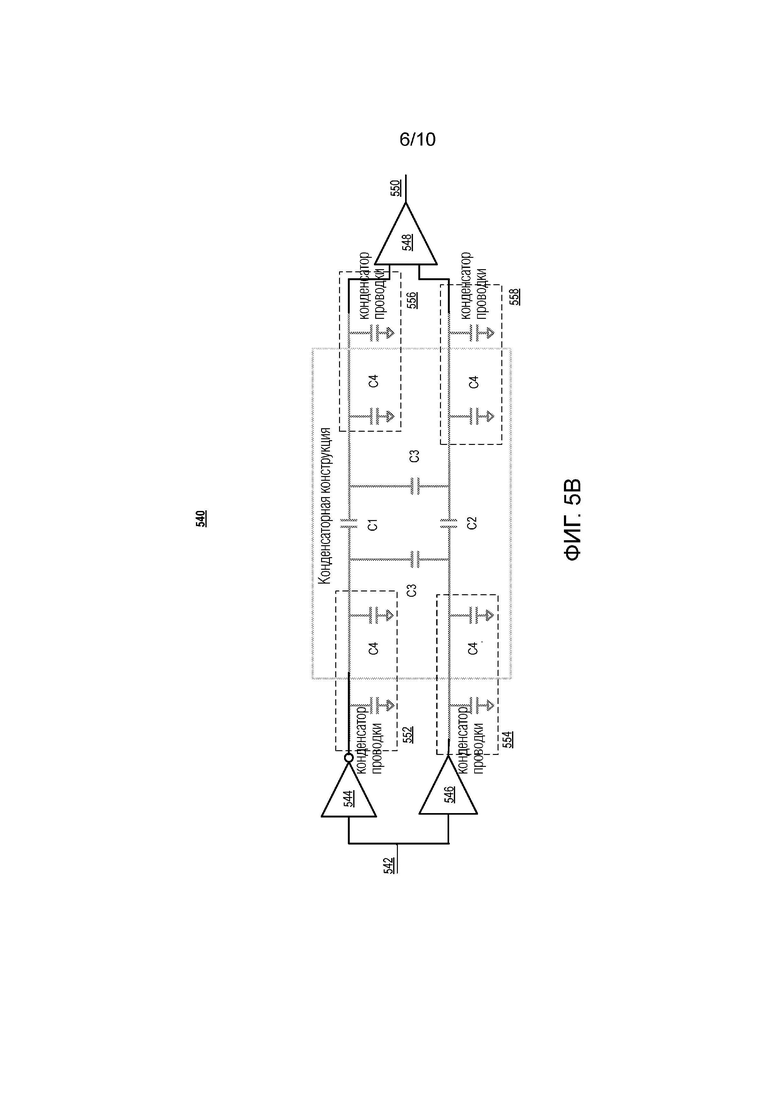
[0047] Фиг. 5В показывает емкостные линии 540 связи, обеспечивающие однонаправленную дифференциальную сигнализацию согласно вариантам осуществления настоящего документа. Емкостные линии 540 связи могут быть реализованы в виде части конструкции 500 ротор-вал фиг. 5А. Множественные отраженные световые сигналы могут приниматься в компонентах 502 ротора и затем декодироваться и обрабатываться, результатом чего является сигнал 542. Для обеспечения качественной передачи данных компонентам 526 вала с минимальным шумом, может быть использована дифференциальная сигнализация. Соответственно, сигнал 542 может быть связан с инвертором 544 и усилителем 546. Выход инвертора 544 связан с кольцом 552, которое эквивалентно кольцу 506 фиг. 5А. Усилитель 546 связан с кольцом 554, которое эквивалентно кольцу 508 фиг. 5А. Каждое из кольца 552 и кольца 554 может быть выровнено с воздушным зазором относительно соответствующего кольца 556 и кольца 558 для создания конденсаторов С1 и С2, соответственно. Результирующие дифференциальные сигналы связаны с дифференциальным усилителем 548 для генерирования сигнала 550. Следовательно, для обеспечения дифференциальной сигнализации могут потребоваться две емкостные линии связи. Одна емкостная линия связи обеспечивается конденсатором С1, и другая емкостная линия связи обеспечивается конденсатором С2. Для обеспечения двунаправленной дифференциальной сигнализации могут потребоваться четыре емкостные линии связи. Конденсаторы, обозначенные «конденсатор проводки (Wire Cap)», могут также называться «конденсаторами трассировки платы».
[0048] Типичными значениями для конденсаторов могут быть следующие: C1=C2=10,9 пФ; C3=2,25 пФ; и C4=2,25 пФ. Как отмечено выше, конденсаторы С1 и С2 определяются на основе воздушного зазора 518 фиг. 5А. Конденсаторы С3 определяются на основе вертикального зазора 520. В некоторых вариантах осуществления, воздушный зазор 518 может быть равен 5 мил, и вертикальный зазор 520 может иметь вертикальный зазор 1,53 мм и высоту 6,35 мм. На основе этих значений, типичные конденсаторы С1 и С2 могут составлять от 10 пФ до 15 пФ. Большие конденсаторы С1 и С2 с воздушным зазором могут дополнительно улучшать производительность емкостной линии связи, в том числе обеспечивать более высокие скорости передачи данных. Будущие конструкции смогут обеспечивать от 50 пФ до 200 пФ. В некоторых вариантах осуществления, отклонение или допуск меньше 20% для значений конденсаторов С1 и С2 может потребоваться для функционирования лидарной системы. Конденсаторы С3 и С4 являются паразитными конденсаторами, и каждый из конденсаторов С3 и каждый из конденсаторов С4 может иметь отличное значение. Для обеспечения максимальной производительности желательно, чтобы значения С3 и С4 были минимизированы.
[0049] Конструкция 500 ротор-вал фиг. 5А может быть сконфигурирована с более чем двумя кольцами на роторе 501 и более чем двумя соответствующими кольцами на вале 511. Как описано выше, двунаправленная сигнализация или дифференциальная сигнализация может быть обеспечена двумя кольцами на роторе 501 и двумя соответствующими кольцами на вале 511. Для двунаправленной дифференциальной сигнализации требуются четыре кольца на роторе 501 и четыре соответствующих кольца на вале 511. Эта конфигурация поддерживает четыре отдельных канала связи. По существу, число каналов связи, обеспечиваемых архитектурой конструкции 500 ротор-вал, является масштабируемым. Для добавления дополнительных каналов связи посредством конденсаторной связи, на ротор 501 и вал 511 может быть добавлена (т.е., расположена последовательно) дополнительная пара колец. Механическая спецификация для дополнительных колец может быть основана, отчасти, на воздушном зазоре 518 и вертикальном зазоре 520. Итак, конструкция 500 ротор-вал реализует бесконтактный цилиндрический интерфейс на основе конденсаторной связи.
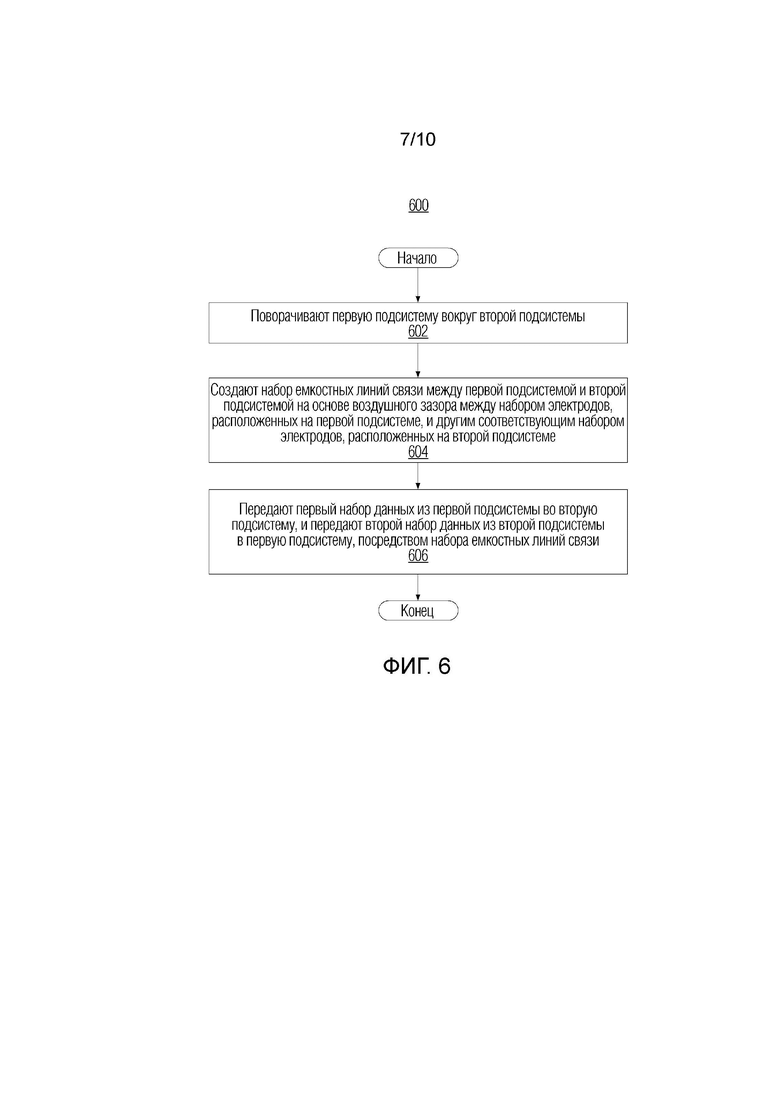
[0050] Фиг. 6 показывает блок-схему 600 последовательности операций для создания емкостных линий связи согласно вариантам осуществления настоящего изобретения. Способ содержит этапы, на которых:
[0051] поворачивают первую подсистему вокруг второй подсистемы (этап 602),
[0052] создают набор емкостных линий связи между первой подсистемой и второй подсистемой на основе воздушного зазора между набором электродов, расположенных на первой подсистеме, и другим соответствующим набором электродов, расположенных на второй подсистеме (этап 604),
[0053] передают первый набор данных из первой подсистемы во вторую подсистему, и передают второй набор данных из второй подсистемы в первую подсистему посредством набора емкостных линий связи (этап 606).
[0054] Когда число электродов в каждом наборе электродов равно четырем, набор емкостных линий связи содержит четыре канала связи. В случае четырех каналов связи, двунаправленная дифференциальная сигнализация может быть использована для передачи данных между первой подсистемой и второй подсистемой. Способ может включать в себя этапы, на которых: кодируют и декодируют двунаправленные дифференциальные сигналы с использованием манчестерского кодирования/декодирования; обрабатывают двунаправленные дифференциальные сигналы с использованием кода детектирования ошибок; и питают энергией первую подсистему посредством второй подсистемы посредством индуктивной связи. Код исправления ошибок может быть проверкой с помощью циклического избыточного кода (cyclic redundancy check - CRC). Манчестерское кодирование/декодирование может улучшать время установления сигнализации и частоту функционирования. В некоторых вариантах осуществления, когда число электродов в каждом из наборов электродов равно N, набор емкостных линий связи содержит N каналов связи.
[0055] Как описано выше, система согласно вариантам осуществления настоящего документа может содержать цилиндрический ротор, содержащий цилиндрическое отверстие в центре цилиндрического ротора; одно или более колец ротора, которые прикреплены к внутренней части цилиндрического отверстия цилиндрического ротора; первый приемопередатчик, расположенный на цилиндрическом роторе и связанный с ним; вал, расположенный внутри цилиндрического отверстия в центре цилиндрического ротора. Цилиндрический ротор может поворачиваться вокруг вала. Система может также содержать: второй приемопередатчик, расположенный на вале и связанный с ним; один или более конденсаторов с воздушным зазором, созданных посредством воздушного зазора между каждой парой колец; одну или более емкостных линий связи, обеспеченных между первым приемопередатчиком и вторым приемопередатчиком на основе одного или более конденсаторов с воздушным зазором.
[0056] Упомянутые одна или более емкостных линий связи могут создавать одно или более соответствующих отдельных соединений между первым приемопередатчиком и вторым приемопередатчиком. Цилиндрический ротор и вал могут содержать N соответствующих пар колец. Двунаправленный дифференциальный сигнал передается и принимается первым приемопередатчиком и вторым приемопередатчиком с использованием четырех емкостных линий связи. Емкостные линии связи могут использовать протокол низковольтной дифференциальной сигнализации (low voltage differential signaling - LVDS), или емкостные линии связи могут использовать интерфейсы параллельно-последовательного и последовательно-параллельного преобразователей (Serializer/Deserializer - SERDES). Двунаправленный дифференциальный сигнал может кодироваться и декодироваться с использованием манчестерского кода. Двунаправленный дифференциальный сигнал может обрабатываться с использованием кода детектирования ошибок, такого как проверка с помощью циклического избыточного кода (CRC). Первый приемопередатчик и второй приемопередатчик могут содержать лидарную систему.
D. Реализация емкостной линии связи
[0057] Будут описаны два подхода для реализации емкостной линии связи с использованием заказных протоколов. Первый подход описывается относительно фиг. 7. Второй подход, основанный на интерфейсах параллельно-последовательного и последовательно-параллельного преобразователей (SERDES), описывается относительно фиг. 8. Фиг. 7 показывает систему 700 для реализации емкостной линии связи с использованием заказных протоколов согласно вариантам осуществления настоящего документа. Характеристики системы 700 включают в себя: малое время ожидания, низкую стоимость и низкую максимальную скорость передачи данных (~250 Мбит/с). Система 700 содержит плату 1 702, конденсатор 704 с воздушным зазором и плату 2 706. Тактовые сигналы с частотой 750 МГц и данные со скоростью 250 Мбит/с подаются на микросхему буфера тактовых сигналов, как показано на фиг. 7. Каждый из двух выходов микросхемы буфера тактовых сигналов связан с одним из двух конденсаторов в конденсаторе 704 с воздушным зазором, и, в свою очередь, конденсатор 704 с воздушным зазором связан с платой 2 706. На плате 2 706, данные обрабатываются в резонаторе, выпрямителе, и средстве согласования и сдвига уровня. Последующими выходными сигналами являются дифференциальные данные, передаваемые со скоростью 250 Мбит/с.
[0058] Фиг. 8 показывает другую систему 800 для реализации емкостной линии связи с заказными протоколами согласно вариантам осуществления настоящего раскрытия. Эта система использует интерфейсы параллельно-последовательного и последовательно-параллельного преобразователей (SERDES) между двумя разными матрицами программируемых логических вентилей (field programmable gate array - FPGA) или заказными системами на кристалле (system on a chip - SOC) для создания линии связи без каких-либо дополнительных компонентов. Характеристики этой системы включают в себя высокое время ожидания, FPGA или SOC с поддержкой SERDES; возможность высоких скоростей (возможно ~2 Гбит/с); и легкость реализации.
[0059] Фиг. 8 содержит верхнюю PCB 802, конденсатор 804 с воздушным зазором и нижнюю PCB 806. При функционировании, данные со скоростью 6,25 Гбит/с кодируются посредством FPGA и конденсатора, связанного посредством конденсатора 804 с воздушным зазором. В свою очередь, сигнал с кодированными данными принимается FPGA на нижней PCB 806.
[0060] Характеристики системы 800 включают в себя: использование внутреннего SERDES из верхней и нижней FPGA для связанного по переменному току интерфейса; SERDES с более высокой скоростью может быть предпочтительным, когда конденсатор переменного тока действует в качестве фильтра верхних частот; последовательность запуска для синхронизации SERDES может иметь значение, если сигнал основан на низкоскоростных структурах; и необходимость проверки на контенте с самой низкой частотой во время запуска. Предполагается, что 8 битовое/10 битовое кодирование может быть отключено. Иначе, 8 битовое/10 битовое кодирование или другие схемы кодирования может быть также использовано для поддержания контента с достаточно высокой частотой, но может быть необходимо проверять контент с минимальной частотой и допускать меньшую ширину полосы частот.
Е. Варианты осуществления системы
[0061] В вариантах осуществления, аспекты настоящего патентного документа могут быть направлены на или реализованы на основе систем обработки информации/ вычислительных систем. Для целей настоящего раскрытия, вычислительная система может включать в себя любые вспомогательные средства или может агрегировать вспомогательные средства, выполненные с возможностью вычислять, определять, классифицировать, обрабатывать, передавать, принимать, получать, создавать, маршрутизировать, переключать, отображать, связывать, обнаруживать, детектировать, записывать, воспроизводить, управлять, или использовать любую форму информации, сведений, или данных для целей бизнеса, научных целей, целей управления, или других целей. Например, вычислительная система может быть оптической измерительной системой, такой как лидарная система, которая использует время распространения сигнала для отображения объектов в ее среде. Вычислительная система может включать в себя память с произвольным доступом (random access memory - RAM), один или несколько ресурсов обработки, таких как центральный процессор (central processing unit - CPU) или аппаратная или программная управляющая логика, ROM, и/или другие типы памяти. Дополнительные компоненты вычислительной системы могут включать в себя одну или несколько сетей или беспроводных портов для связи с внешними устройствами, а также различные устройства ввода и вывода (input and output - I/O), такие как клавиатура, мышь, сенсорный экран и/или видеодисплей. Вычислительная система может также включать в себя одну или несколько шин, выполненных с возможностью передавать данные между различными аппаратными компонентами.
[0062] Фиг. 9 показывает упрощенную блок-схему вычислительного устройства/ системы обработки информации (или вычислительной системы) согласно вариантам осуществления настоящего документа. Следует понимать, что функциональности, показанные для системы 900, могут функционировать для поддержки различных вариантов осуществления системы обработки информации, хотя следует понимать, что система обработки информации может быть сконфигурирована отличным образом и может включать в себя отличные компоненты.
[0063] Как показано на фиг. 9, система 900 включает в себя один или более центральных процессоров 901 (CPU), которые обеспечивают вычислительные ресурсы и управляют компьютером. CPU 901 может быть реализован с использованием микропроцессора и т.п., и может также включать в себя один или более графических процессоров 917 (graphics processing units - GPU) и/или сопроцессор операций с плавающей точкой для математических вычислений. Система 900 может также включать в себя системную память 902, которая может иметь форму памяти с произвольным доступом (random access memory - RAM), постоянного запоминающего устройства (read-only memory - ROM), или и того, и другого.
[0064] Также, как показано на фиг. 9, может быть обеспечен ряд контроллеров и периферийных устройств. Входной контроллер 903 представляет интерфейс для различных устройств 904 ввода, таких как клавиатура, мышь, или стилус. Также может быть беспроводной контроллер 905, который связывается с беспроводным устройством 906. Система 900 может также включать в себя контроллер 907 запоминающих устройств для сопряжения с одним или несколькими запоминающими устройствами 908, каждое из которых включает в себя носитель данных, такой как флэш-память, или оптический носитель, который может быть использован для записи программ команд для управления системами, средствами обеспечения, и приложениями, которые могут включать в себя варианты осуществления программ, которые реализуют различные аспекты настоящего изобретения. Запоминающее устройство (устройства) 908 может быть также использовано для запоминания обрабатываемых данных или данных, подлежащих обработке согласно настоящему изобретению. Система 900 может также включать в себя контроллер 909 отображения для обеспечения интерфейса с устройством 911 отображения. Вычислительная система 900 может также включать в себя самоходный сигнальный контроллер 912 для обмена данными с самоходной системой 913. Контроллер 914 связи может сопрягаться с одним или несколькими устройствами 915 связи, что позволяет системе 900 связываться с удаленными устройствами через любую из множественных сетей, в том числе самоходную сеть, Интернет, облачный ресурс (например, Ethernet-облако, волоконно-оптический канал по сети Ethernet (Fiber Channel over Ethernet - FCoE)/ облако ретрансляции центров обработки данных (Data Center Bridging - DCB), и т.д.), локальную сеть (local area network - LAN), глобальную сеть (wide area network - WAN), распределенную сеть хранения данных (storage area network - SAN) или через любые пригодные электромагнитные сигналы-носители, включающие в себя инфракрасные сигналы.
[0065] В показанной системе, все главные компоненты системы могут соединяться с шиной 916, которая может представлять более чем одну физическую шину. Однако, различные компоненты системы могут находиться или могут не находиться в физической близости друг к другу. Например, входные данные и/или выходные данные могут удаленно передаваться из одного физического местоположения в другое. Дополнительно, программы, которые реализуют различные аспекты настоящего изобретения, могут быть доступны из удаленного местоположения (например, сервера) по сети. Такие данные и/или программы могут быть передаваться через любой из множественных машиночитаемых носителей, включающих в себя, но не ограниченных этим: магнитные носители, такие как жесткие диски, гибкие диски, и магнитная лента; оптические носители, такие как CD-ROM и голографические устройства; магнитно-оптические носители; и аппаратные устройства, которые специально выполнены с возможностью запоминать или запоминать и выполнять программный код, такие как специализированные интегральные схемы (application specific integrated circuit - ASIC), программируемые логические устройства (programmable logic device - PLD), устройства флэш-памяти, и устройства ROM и RAM.
[0066] Варианты осуществления настоящего изобретения могут быть закодированы на одном или нескольких непереходных компьютерно-читаемых носителях данных с использованием команд, заставляющих один или более процессоров или обрабатывающих блоков выполнять этапы. Следует отметить, что упомянутые один или более непереходных компьютерно-читаемых носителей данных должны включать в себя энергозависимую и энергонезависимую память. Следует отметить, что возможны альтернативные реализации, включающие в себя аппаратную реализацию или программную/аппаратную реализацию. Аппаратно-реализуемые функции могут быть реализованы с использованием ASIC, программируемых матриц, схем обработки цифровых сигналов, и т.п. Соответственно, предполагается, что термины «средство» в любом пункте формулы изобретения включают в себя как программную, так и аппаратную реализации. Подобным образом, термин «компьютерно-читаемый носитель или носители данных», используемый здесь, включает в себя программное и/или аппаратное средство, имеющее программу команд, реализованную на нем, или их комбинацию. С учетом этих альтернатив реализации следует понимать, что фигуры и сопутствующее описание обеспечивают функциональную информацию, которая может потребоваться специалистам в данной области техники для написания программного кода (т.е., программного средства) и/или для изготовления схем (т.е., аппаратного средства) для осуществления требуемой обработки.
[0067] Следует отметить, что варианты осуществления настоящего изобретения могут дополнительно относиться к компьютерным продуктам с непереходным материальным компьютерно-читаемым носителем данных, на которых имеется компьютерный код для выполнения различных компьютерно-реализуемых операций. Носители и компьютерный код могут быть специально спроектированными и сконструированными для целей настоящего изобретения, или они могут относиться к типу, известному или доступному для специалистов в данной области техники. Примеры материальных компьютерно-читаемых носителей данных включают в себя, но не ограничены этим: магнитные носители, такие как жесткие диски, гибкие диски, и магнитная лента; оптические носители, такие как CD-ROM и голографические устройства; магнитно-оптические носители; и аппаратные устройства, которые специально выполнены с возможностью запоминать или запоминать и выполнять программный код, такие как специализированные интегральные схемы (ASIC), программируемые логические устройства (PLD), устройства флэш-памяти, и устройства ROM и RAM. Примеры компьютерного кода включают в себя машинный код, например, создаваемый компилятором, и файлы, содержащие код более высокого уровня, которые выполняются компьютером с использованием интерпретатора. Варианты осуществления настоящего изобретения могут быть реализованы целиком или частично в виде машинно-выполняемых команд, которые могут находиться в программных модулях, которые выполняются обрабатывающим устройством. Примеры программных модулей включают в себя библиотеки, программы, подпрограммы, объекты, компоненты, и структуры данных. В распределенных вычислительных средах, программные модули могут быть физически расположены в местоположениях, которые являются локальными, удаленными, или как локальными, так и удаленными.
[0068] Специалистам в данной области техники будет понятно, что никакая вычислительная система или язык программирования не являются критическими для применения на практике настоящего изобретения. Специалистам в данной области техники будет также понятно, что некоторые элементы, описанные выше, могут быть физически и/или функционально подразделены на подмодули или объединены вместе.
[0069] Специалистам в данной области техники будет понятно, что предыдущие примеры и варианты осуществления являются иллюстративными и не ограничивают объем настоящего раскрытия. Предполагается, что все их перестановки, улучшения, эквиваленты, комбинации, и реализации, которые будут понятны специалистам в данной области техники после прочтения описания изобретения и изучения чертежей, находятся в пределах истинной сущности и объема настоящего раскрытия. Следует также отметить, что элементы любых пунктов формулы изобретения могут быть выполнены иначе, в том числе могут иметь множественные зависимости, конфигурации, и комбинации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ И СПОСОБЫ ДЛЯ УЛУЧШЕНИЯ ОБНАРУЖЕНИЯ ЭХО-СИГНАЛА В ОПТИЧЕСКОЙ СИСТЕМЕ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И ОБНАРУЖЕНИЯ | 2018 |
|
RU2787082C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ МОДЕЛИРОВАНИЯ НЕЙРОННЫХ СЕТЕЙ КОМПОНЕНТОВ ТУРБИНЫ | 2008 |
|
RU2482307C2 |
| СПОСОБ И СИСТЕМА ДЛЯ АДАПТИВНОЙ АПЕРТУРНОЙ НАСТРАИВАЕМОЙ АНТЕННЫ | 2016 |
|
RU2695283C1 |
| СПОСОБЫ И СИСТЕМЫ УПРАВЛЕНИЯ НАПРАВЛЕНИЕМ ПРОХОДКИ ГОРНОЙ МАШИНЫ | 2019 |
|
RU2756634C2 |
| СПОСОБЫ И СИСТЕМЫ ОБНАРУЖЕНИЯ ЛИДАРОВ | 2020 |
|
RU2775823C2 |
| СИСТЕМА ОТОБРАЖЕНИЯ С ЛИНИЯМИ ЭЛЕКТРОСТАТИЧЕСКОЙ И РАДИОСВЯЗИ | 2014 |
|
RU2670787C9 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ВЫБРОСА | 1991 |
|
RU2028007C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2014 |
|
RU2573391C2 |
| НАЗЕМНОЕ УСТРОЙСТВО И СПОСОБ СВЯЗИ ДЛЯ ИСПОЛЬЗОВАНИЯ В ТЕЛЕМЕТРИИ ПО БУРИЛЬНОЙ КОЛОННЕ | 2006 |
|
RU2401931C2 |
| ОБНАРУЖЕНИЕ СКРЫТОГО ОБЪЕКТА | 2004 |
|
RU2371735C2 |

Изобретение относится к области передачи данных. Технический результат заключается в повышении эффективности передачи данных. Предложена система, с помощью которой создают емкостную линию связи на основе поворотного цилиндрического конденсатора. Цилиндрический ротор поворачивается вокруг вала и сохраняет воздушный зазор между цилиндрическим ротором и валом для создания одного или более конденсаторов с воздушным зазором. Первая подсистема, содержащая компоненты светового обнаружения и измерения дальности, связана с ротором. Вторая подсистема, содержащая функции анализа данных, связана с валом. Первая подсистема и вторая подсистема связаны посредством емкостных линий связи, созданных посредством конденсаторов с воздушным зазором. Сигнализация связи, используемая на емкостных линиях связи, может быть двунаправленной и дифференциальной сигнализацией. Первая подсистема и вторая подсистема могут содержать лидарную систему светового обнаружения и измерения дальности. Вторая подсистема может питать энергией первую подсистему посредством индуктивной связи. 3 н. и 17 з.п. ф-лы, 11 ил.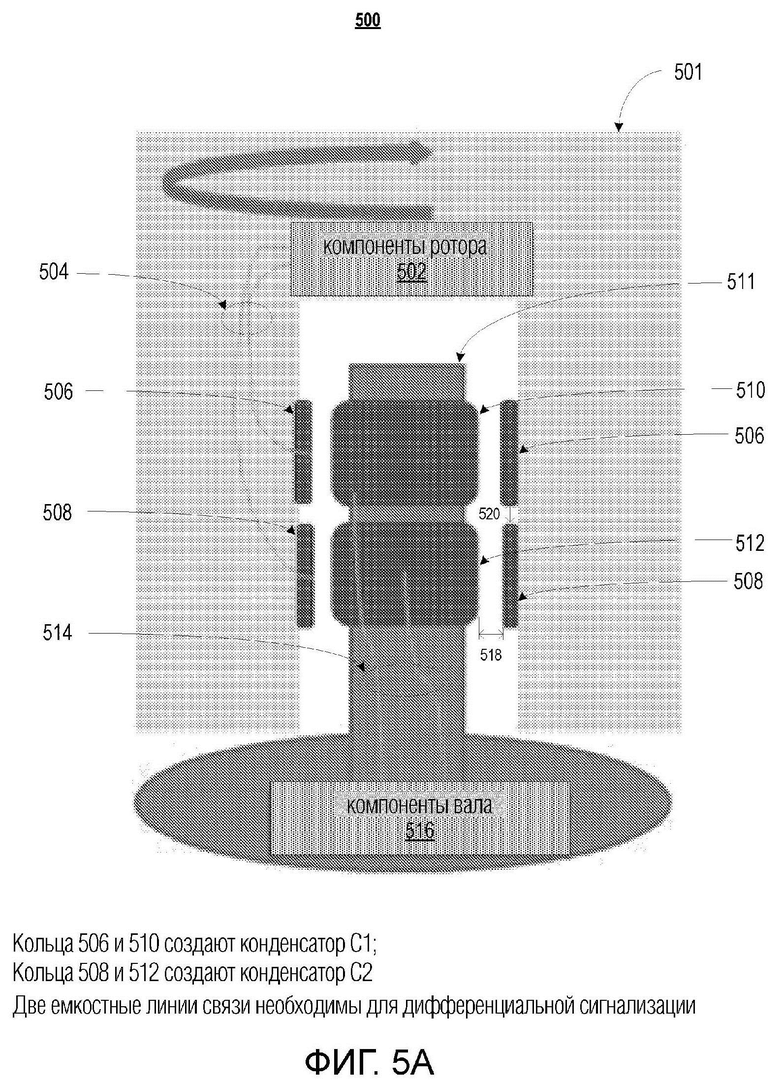
1. Система для передачи данных посредством емкостной связи, содержащая:
цилиндрический ротор, содержащий цилиндрическое отверстие в центре цилиндрического ротора;
передатчик, расположенный на цилиндрическом роторе и связанный с ним;
вал, расположенный внутри цилиндрического отверстия;
приемник, расположенный на валу и связанный с ним; и
емкостную линию связи, которая связывает передатчик с приемником посредством конденсатора с воздушным зазором, расположенного между цилиндрическим ротором и валом.
2. Система по п. 1, дополнительно содержащая:
первое кольцо, прикрепленное к внутренней поверхности цилиндрического отверстия цилиндрического ротора;
второе кольцо, прикрепленное к внешней поверхности вала; и
причем воздушный зазор между первым кольцом и вторым кольцом создает конденсатор с воздушным зазором.
3. Система по п. 1, в которой данные передаются между передатчиком и приемником посредством емкостной линии связи.
4. Система по п. 1, в которой цилиндрический ротор поворачивается вокруг вала.
5. Система для передачи данных посредством емкостной связи, содержащая:
цилиндрический ротор, содержащий цилиндрическое отверстие в центре цилиндрического ротора;
одно или более колец ротора, прикрепленных к внутренней поверхности цилиндрического отверстия цилиндрического ротора;
первый приемопередатчик, расположенный на цилиндрическом роторе и связанный с ним;
вал, расположенный внутри цилиндрического отверстия в центре цилиндрического ротора, причем цилиндрический ротор поворачивается вокруг вала;
одно или более колец вала, которые прикреплены на внешней поверхности вала, причем каждое кольцо из одного или более колец ротора образует пару с соответствующим кольцом из одного или более колец вала;
второй приемопередатчик, расположенный на валу и связанный с ним;
один или более конденсаторов с воздушным зазором, созданных посредством воздушного зазора между каждой парой колец; и
одну или более емкостных линий связи, обеспеченных между первым приемопередатчиком и вторым приемопередатчиком на основе одного или более конденсаторов с воздушным зазором.
6. Система по п. 5, в которой одна или более емкостных линий связи создают одно или более соответствующих отдельных соединений между первым приемопередатчиком и вторым приемопередатчиком.
7. Система по п. 5, в которой цилиндрический ротор и вал содержат N соответствующих пар колец, которые поддерживают N емкостных линий связи.
8. Система по п. 5, в которой двунаправленный дифференциальный сигнал передается и принимается первым приемопередатчиком и вторым приемопередатчиком с использованием четырех емкостных линий связи.
9. Система по п. 8, в которой емкостные линии связи используют протокол низковольтной дифференциальной сигнализации (LVDS).
10. Система по п. 8, в которой емкостные линии связи используют интерфейсы параллельно-последовательного и последовательно-параллельного преобразователей (SERDES).
11. Система по п. 8, в которой двунаправленный дифференциальный сигнал кодируется и декодируется с использованием манчестерского кода.
12. Система по п. 8, в которой двунаправленный дифференциальный сигнал обрабатывается с использованием кода детектирования ошибок.
13. Система по п. 5, в которой вал обеспечивает энергию для цилиндрического ротора посредством индуктивной связи.
14. Способ для передачи данных посредством емкостной связи, содержащий этапы, на которых:
поворачивают цилиндрический ротор вокруг вала, причем цилиндрический ротор содержит первую подсистему, а вал содержит вторую подсистему;
создают набор емкостных линий связи между первой подсистемой и второй подсистемой на основе воздушного зазора между набором электродов, расположенных на цилиндрическом роторе, и другим соответствующим набором электродов, расположенных на второй подсистеме; и
передают первый набор данных из первой подсистемы во вторую подсистему и второй набор данных из второй подсистемы в первую подсистему посредством набора емкостных линий связи.
15. Способ по п. 14, в котором, когда число электродов в каждом из наборов электродов равно N, набор емкостных линий связи содержит N каналов связи.
16. Способ по п. 14, дополнительно содержащий этап, на котором:
передают данные с использованием двунаправленной дифференциальной сигнализации по четырем емкостным линиям связи.
17. Способ по п. 16, дополнительно содержащий этап, на котором:
кодируют и декодируют двунаправленные дифференциальные сигналы с использованием манчестерского кода.
18. Способ по п. 14, дополнительно содержащий этап, на котором:
питают энергией первую подсистему посредством второй подсистемы посредством индуктивной связи.
19. Способ по п. 14, в котором первая подсистема и вторая подсистема содержат лидарную систему.
20. Способ по п. 14, в котором допуск конденсатора с воздушным зазором составляет меньше 20%.
| US 2015228403 A1, 13.08.2015 | |||
| ТУРБИНА ДЛЯ ПЕРЕДАЧИ ЭЛЕКТРИЧЕСКИХ ДАННЫХ | 2013 |
|
RU2608429C1 |
| US 2002132589 A1, 19.09.2002 | |||
| СИСТЕМА УСТРОЙСТВ, ПРИМЕНЯЮЩАЯ ПЕРЕДАЧУ ДАННЫХ ЧЕРЕЗ ЧЕЛОВЕЧЕСКОЕ ТЕЛО | 2010 |
|
RU2520563C2 |
| СПОСОБ ПРИВЯЗКИ КООРДИНАТ НЕБЕСНЫХ РАДИОИСТОЧНИКОВ К ОПТИЧЕСКОЙ АСТРОМЕТРИЧЕСКОЙ СИСТЕМЕ КООРДИНАТ ЛИПОВКА-КОСТКО-ЛИПОВКА (ЛКЛ, англ. LKL) | 2010 |
|
RU2445641C2 |

