[0001] Настоящая технология относится к системам обнаружения и определения дальности с помощью света (LiDAR, лидар) и способам обнаружения объектов в целом; и, в частности, к лидарным системам, основанным на источниках света с непрерывным излучением с частотной модуляцией (FMCW, frequency modulated continuous wave).
Уровень техники
[0002] Несколько компьютеризированных навигационных систем, которые выполнены с возможностью помощи в навигации и/или управлении транспортными средствами, были предложены и реализованы в предшествующем уровне техники. Эти системы варьируются от более простых решений на основе картографической локализации, т.е. использования компьютерной системы для помощи водителю в навигации по маршруту от начальной точки до конечной точки; к более сложным, таким как системы вождения с содействием посредством компьютера или автономные без водителя.
[0003] Некоторые из этих систем реализованы как так называемые системы «круиз-контроля» (системы автоматического поддержания скорости движения). В рамках этих систем компьютерная система, установленная на транспортных средствах, поддерживает заданную пользователем скорость транспортного средства. Некоторые из систем круиз-контроля реализуют систему «интеллектуального управления расстоянием», с помощью которой пользователь может установить расстояние до потенциального автомобиля впереди (например, выбрать значение, выраженное в количестве транспортных средств), а компьютерная система регулирует скорость транспортного средства, по меньшей мере частично, на основе транспортного средства, приближающегося к потенциальному транспортному средству впереди в пределах предварительно определенного расстояния. Некоторые из систем круиз-контроля дополнительно оснащены системами контроля столкновений, которые при обнаружении транспортного средства (или другого препятствия) перед движущимся транспортным средством замедляют или останавливают транспортное средство.
[0004] Некоторые из более совершенных систем обеспечивают полностью автономное вождение транспортного средства без прямого управления со стороны оператора (т.е. водителя). Эти автономно управляемые транспортные средства включают в себя системы, которые могут вызывать ускорение, торможение, остановку, смену полосы движения и самостоятельную парковку.
[0005] Одной из основных технических проблем при реализации вышеупомянутых систем является способность обнаруживать объекты, расположенные вокруг транспортного средства. В одном примере системам может потребоваться способность обнаруживать транспортное средство впереди текущего транспортного средства (текущее транспортное средство, имеющее систему на борту), причем это транспортное средство впереди может представлять риск/опасность для текущего транспортного средства и может потребовать, чтобы система приняла корректирующие меры, будь то торможение или иное изменение скорости, остановка или смена полосы движения.
[0006] Обнаружение объектов на основе лидара обычно включает в себя передачу лучей света в направлении интересующей области и обнаружение отраженных световых лучей, например, от объектов в интересующей области, для формирования представления интересующей области, включая любые объекты. В качестве источника света часто используются лазеры, излучающие световые импульсы с узкой длиной волны. Положение и расстояние до объекта можно вычислить с помощью расчетов времени пролета излучаемого и обнаруженного светового луча. Вычисляя такие позиции, как «точки данных», можно сформировать цифровое многомерное представление окружающей среды.
[0007] Как правило, что касается физики обнаружения объектов на основе лидара, существует по меньшей мере два преобладающих подхода, известных в настоящее время в данной области техники. Один основан на использовании импульсного (лазерного) излучения (так называемые лидарные системы Time of Flight, система LiDAR ToF, лидарная система определения времени пролета луча). В лидарных системах ToF каждый лидарный датчик излучает короткий импульс предварительно заданной длины волны и дополнительно регистрирует время, которое требуется для того, чтобы импульс рассеялся от окружающего объекта и вернулся к соответствующему лидарному датчику. Поворачивая лидарную систему ToF, расположенную в верхней части транспортного средства, содержащую множество таких лидарных датчиков, на 360 градусов, можно сформировать трехмерное представление окружающей среды транспортного средства.
[0008] Другой физический подход, используемый в современных лидарных системах, основан на непрерывной волне с частотной модуляцией (FMCW) - так называемых FMCW или когерентных лидарных системах. В этих системах каждый лидарный датчик выполнен с возможностью излучения когерентной непрерывной волны предварительно заданной длины волны (несущей волны), которая дополнительно модулируется гетеродином с использованием другого (модулирующего) сигнала, такого как сигнал модуляции ЛЧМ, например, указывающего на функцию изменения несущей волны. Таким образом, результирующий модулированный сигнал может кодировать определенные параметры движения окружающего объекта, от которого он был отражен. Подобно лидарным системам ToF, на основе расчетов времени полета можно рассчитать расстояние до окружающего объекта. Кроме того, наложив рассеянный сигнал FMCW на исходный (то есть тот, который изначально был создан гетеродином) на основе эффекта Доплера, можно получить текущую скорость окружающего объекта относительно лидарной системы.
[0009] Одним из ключевых преимуществ лидарных систем FMCW по сравнению с лидарными системами ToF может быть то, что первые позволяют использовать волну за пределами спектра видимого света (например, 1550 нм), что приводит к большему расстоянию определения дальности (из-за ограничений в снижение мощности излучения), лучшей устойчивости к помехам от других источников света (таких как лидарные системы других транспортных средств или Солнца, например) и повышению стандартов безопасности для глаз.
[00010] Однако есть определенные технические недостатки, связанные с обнаружением объектов на основе FMCW лидара. Например, одним из факторов, влияющих на качество трехмерного представления окружения транспортного средства и объектов в нем, формируемого лидарной системой FMCW, является ее неспособность регистрировать определенные лучи, рассеянные от удаленных объектов, из-за значительной потери их амплитуды. Следовательно, формирование трехмерного представления окружения транспортного средства, которое позволило бы всесторонне представить объекты в нем, может оказаться сложной задачей, что может повлиять на общую безопасность эксплуатации транспортного средства.
[00011] Для решения указанной выше проблемы были предложены определенные подходы предшествующего уровня техники, включая усиление модулированного рассеянного сигнала.
[00012] Публикация патентной заявки США № 2019/0302268-A1, опубликованной 3 октября 2019 г., предназначенной GM Global Technology Operations LLC и озаглавленный «Coherent LiDAR System with Extended Field of View», раскрывает когерентную лидарную систему, способ сборки системы и транспортное средство, включая систему, включающую источник света для вывода непрерывной волны и модулятор для модуляции частоты непрерывной волны и обеспечения сигнала непрерывной волны с частотной модуляцией (FMCW). Система включает в себя светоделитель для разделения сигнала FMCW на два или более тракта и две или более линзы с диафрагмой. По меньшей мере одна из двух или более линз с диафрагмой связана с каждым из двух или более трактов и выполнена с возможностью получения приемного луча, возникающего в результате отражения выходного сигнала, полученного из сигнала FMCW.
[00013] Публикация заявки PCT WO 2019/070751-A1, опубликованная 11 апреля 2019 г., предназначенная BRIDGER PHOTONICS INC и озаглавленная «Processing Temporal Segments of Laser Chirps and Examples of Use in FMCW LiDAR Methods and Apparatuses» раскрывает примеры лазерных радарных систем FMCW и способы, которые могут сегментировать обработку ЛЧМ-сигнала с более широкой полосой пропускания на множество ЛЧМ-сигналов с меньшей продолжительностью (например, с меньшей полосой пропускания). Эта сегментация может иметь преимущества в некоторых примерах улучшения рабочего цикла измерения и разрешения по диапазону, и/или обеспечения более гибкой обработки, и/или обеспечения улучшенного обнаружения более удаленных объектов.
[00014] Статья под названием «Nonlinear Error Correction for FMCW Ladar by the Amplitude Modulation Method», написанная Тонг Чжан, Синхуа Цюй и Фумин Чжан и опубликованная журналом Optics Express, раскрывает способ амплитудной модуляции для коррекции нелинейной ошибки технологии FMCW. Оптическая структура способа состоит из двух тандемных волоконных интерферометров. Первый интерферометр используется для генерирования несущего сигнала, а второй используется для загрузки информации о дальности по амплитуде несущего сигнала. В конце концов, экспериментальный результат подтверждает, что нелинейная ошибка может быть эффективно подавлена, фазовая ошибка из-за рассогласования устранена наблюдаемым образом, а разрешение по диапазону может быть заметно улучшено до 69 мкм; стабильность составляет 2,9 мкм, а точность измерения - 4,3 мкм.
Сущность изобретения
[00015] Следовательно, существует потребность в системах и способах, которые позволяют избежать, уменьшить или преодолеть ограничения предшествующего уровня техники.
[00016] Разработчики настоящей технологии поняли, что рассеянный сигнал FMCW мог бы более эффективно приниматься и, следовательно, более точно декодироваться лидарной системой FMCW, если бы его амплитуда была усилена на основе расстояния от окружающего объекта, от которого он отражался.
[00017] Таким образом, разработчики настоящей технологии разработали способ, направленный на модуляцию амплитуды сигнала FMCW таким образом, чтобы его амплитуда периодически изменялась (например, непрерывно возрастала в соответствии с предварительно заданной временной зависимостью) на основе порогового расстояния определения дальности лидарной системы FMCW. В связи с этим, чем дальше от лидарной системы FMCW находится окружающий объект, тем больше амплитуда рассеянного сигнала FMCW будет усиливаться в момент его приема, и наоборот.
[00018] Таким образом, модулированный таким образом сигнал FMCW (также называемый в данном документе сигнал «непрерывной волны с амплитудно-частотной модуляцией», сигнал AFMCW), формируемый лидарной системой FMCW, считается более устойчивым к затуханию, вызванному большим расстоянием до данного окружающего объекта, и, таким образом, может позволить регистрировать более удаленные объекты в окружении транспортного средства. Неограничивающие варианты осуществления настоящей технологии позволяют формировать более полное и более широкое трехмерное представление окружения транспортного средства, что, как полагают, улучшает точность и расстояние определения дальности лидарных систем FMCW, что дополнительно обеспечивает более безопасную работу транспортного средства.
[00019] В соответствии с первым широким аспектом настоящей технологии предложена лидарная система, которая имеет пороговое расстояние определения дальности, причем пороговое расстояние определения дальности указывает на самое большое расстояние, на котором лидарная система выполнена с возможностью обнаружения объекта. Лидарная система содержит: источник света, выполненный с возможностью генерирования непрерывной волны; частотный модулятор, выполненный с возможностью модуляции частоты непрерывной волны, тем самым генерируя сигнал непрерывного излучения с частотной модуляцией (FMCW); и амплитудный модулятор, выполненный с возможностью модуляции амплитуды сигнала FMCW, тем самым генерируя сигнал непрерывного излучения с амплитудно-частотной модуляцией (AFMCW), причем амплитуда сигнала FMCW модулируется в соответствии с периодом амплитудной модуляции, а период амплитудной модуляции предварительно определяется на основе порогового расстояния определения дальности; светоделитель, выполненный с возможностью деления сигнала AFMCW на первую часть и вторую часть, первая часть может выводиться лидарной системой для отражения от объекта, тем самым генерируя отраженный сигнал, а вторая часть может использоваться для усиления отраженного сигнала; и детектор, выполненный с возможностью усиления отраженного сигнала на основе второй части путем увеличения усиления отраженного сигнала в зависимости от расстояния до объекта от лидарной системы, тем самым генерируя усиленный отраженный сигнал, и усиленный отраженный сигнал указывает на расстояние до объекта от лидарной системы.
[00020] В некоторых реализациях лидарной системы детектор имеет пороговую амплитуду, а усиленный отраженный сигнал имеет амплитуду ниже пороговой амплитуды.
[00021] В некоторых реализациях лидарной системы амплитудный модулятор выполнен с возможностью модуляции амплитуды сигнала FMCW в соответствии с периодической функцией амплитудной модуляции, причем периодическая функция амплитудной модуляции выбирается оператором таким образом, чтобы амплитуда усиленного отраженного сигнала ниже пороговой амплитуды детектора.
[00022] В некоторых реализациях лидарной системы детектор дополнительно выполнен с возможностью приема отраженного сигнала.
[00023] В некоторых реализациях лидарной системы светоделитель выполнен с возможностью деления сигнала AFMCW; и детектор дополнительно выполнен с возможностью приема второй части сигнала AFMCW для усиления отраженного сигнала.
[00024] В некоторых реализациях лидарной системы светоделитель выполнен с возможностью деления сигнала FMCW; амплитудный модулятор дополнительно выполнен с возможностью приема второй части сигнала FMCW; амплитудный модулятор, выполненный с возможностью модуляции амплитуды сигнала FMCW, содержит амплитудный модулятор, выполненный с возможностью модуляции амплитуды второй части сигнала FMCW; и детектор дополнительно выполнен с возможностью приема сигнала AFMCW от амплитудного модулятора для усиления отраженного сигнала.
[00025] В некоторых реализациях лидарной системы амплитудный модулятор, выполненный с возможностью модуляции амплитуды сигнала FMCW, содержит амплитудный модулятор, выполненный с возможностью: генерирования сигнала AFMCW, имеющего непрерывно увеличивающуюся амплитуду в пределах периода амплитудной модуляции.
[00026] В некоторых реализациях лидарной системы амплитудный модулятор, выполненный с возможностью модуляции амплитуды сигнала FMCW, содержит амплитудный модулятор, выполненный с возможностью: генерирования сигнала AFMCW, имеющего асимптотически возрастающую амплитуду в пределах периода амплитудной модуляции.
[00027] В некоторых реализациях лидарной системы амплитудный модулятор, выполненный с возможностью модуляции амплитуды сигнала FMCW, содержит амплитудный модулятор, выполненный с возможностью: генерирования сигнала AFMCW, имеющего линейно возрастающую амплитуду в пределах периода амплитудной модуляции.
[00028] В некоторых реализациях лидарной системы частота непрерывной волны модулируется в соответствии с периодом частотной модуляции; а период частотной модуляции равен периоду амплитудной модуляции.
[00029] В некоторых реализациях лидарной системы период амплитудной модуляции предварительно определяется как значение времени, соответствующее промежутку времени между: первым моментом времени, когда вторая часть выводится из лидарной системы; и вторым моментом времени, когда отраженный сигнал будет принят детектором, если объект находится на пороговом расстоянии определения дальности от лидарной системы.
[00030] В некоторых реализациях лидарной системы частотный модулятор встроен в источник света.
[00031] В некоторых реализациях лидарной системы амплитудный модулятор встроен в источник света.
[00032] В некоторых реализациях лидарной системы амплитудный модулятор представляет собой по меньшей мере одно из следующего: регулируемый оптический модулятор MEMS; электрооптический модулятор; магнитооптический модулятор; волоконно-оптический усилитель; полупроводниковый оптический усилитель; и другой источник света.
[00033] В некоторых реализациях лидарная система установлена в самоуправляемый автомобиль (SDC).
[00034] В некоторых реализациях лидарной системы усиленный отраженный сигнал дополнительно указывает скорость объекта относительно лидарной системы.
[00035] В некоторых реализациях лидарной системы расстояние до объекта используется для управления работой SDC.
[00036] В соответствии со вторым широким аспектом настоящей технологии предложена лидарная система, которая имеет пороговое расстояние определения дальности, причем пороговое расстояние определения дальности указывает самое большое расстояние, на котором лидарная система выполнена с возможностью обнаружения объекта. Лидарная система содержит: источник света, выполненный с возможностью генерирования непрерывной волны; частотный модулятор, выполненный с возможностью модуляции частоты непрерывной волны, тем самым генерируя сигнал непрерывного излучения с частотной модуляцией (FMCW); и светоделитель, выполненный с возможностью деления сигнала FMCW на первую часть и вторую часть, первая часть должна выводиться лидарной системой для отражения от объекта, тем самым генерируя отраженный сигнал, а вторая часть должна использоваться для усиления отраженного сигнала; амплитудный модулятор, выполненный с возможностью модуляции амплитуды второй части сигнала FMCW, тем самым генерируя сигнал непрерывного излучения с амплитудно-частотной модуляцией (AFMCW), причем амплитуда второй части сигнала FMCW модулируется в соответствии с периодом амплитудной модуляции и период амплитудной модуляции предварительно определен на основе порогового расстояния определения дальности; и детектор, выполненный с возможностью усиления отраженного сигнала на основе сигнала AFMCW путем увеличения усиления отраженного сигнала в зависимости от расстояния до объекта от лидарной системы, тем самым генерируя усиленный отраженный сигнал, и усиленный отраженный сигнал указывает на расстояние до объекта от лидарной системы.
[00037] В соответствии с третьим широким аспектом настоящей технологии предложена лидарная система, которая имеет пороговое расстояние определения дальности, причем пороговое расстояние определения дальности указывает на самое большое расстояние, на котором лидарная система выполнена с возможностью обнаружения объекта. Лидарная система содержит: источник света, выполненный с возможностью генерирования непрерывной волны; частотный модулятор, выполненный с возможностью модуляции частоты непрерывной волны, тем самым генерируя сигнал непрерывного излучения с частотной модуляцией (FMCW); и светоделитель, выполненный с возможностью деления сигнала FMCW на первую часть и вторую часть, при этом вторая часть должна использоваться для усиления отраженного сигнала; амплитудный модулятор, выполненный с возможностью модуляции амплитуды первой части сигнала FMCW, тем самым генерируя сигнал непрерывного излучения с амплитудно-частотной модуляцией (AFMCW), причем амплитуда первой части сигнала FMCW модулируется в соответствии с периодом амплитудной модуляции и период амплитудной модуляции предварительно определен на основе сигнала AFMCW для порогового расстояния определения дальности, который может выводиться лидарной системой для отражения от объекта, тем самым генерируя отраженный сигнал; и детектор, выполненный с возможностью усиления отраженного сигнала на основе второй части путем увеличения усиления отраженного сигнала в зависимости от расстояния до объекта от лидарной системы, тем самым генерируя усиленный отраженный сигнал, и усиленный отраженный сигнал указывает на расстояние до объекта от лидарной системы.
[00038] В соответствии с четвертым широким аспектом настоящей технологии предложена лидарная система, которая имеет пороговое расстояние определения дальности, причем пороговое расстояние определения дальности указывает самое большое расстояние, на котором лидарная система выполнена с возможностью обнаружения объекта. Лидарная система содержит: источник света, выполненный с возможностью генерирования непрерывной волны; частотный модулятор, выполненный с возможностью модуляции частоты непрерывной волны, тем самым генерируя сигнал непрерывного излучения с частотной модуляцией (FMCW); и светоделитель, выполненный с возможностью деления сигнала FMCW на первую часть и вторую часть, первый амплитудный модулятор, выполненный с возможностью модуляции амплитуды первой части сигнала FMCW, тем самым генерируя первый сигнал непрерывного излучения с амплитудно-частотной модуляцией (AFMCW), причем амплитуда первой части сигнала FMCW модулируется в соответствии с периодом амплитудной модуляции, а период амплитудной модуляции предварительно определяется на основе порогового расстояния определения дальности, первый сигнал AFMCW может выводиться лидарной системой для отражения от объекта, тем самым генерируя отраженный сигнал; и второй амплитудный модулятор, выполненный с возможностью модуляции амплитуды второй части сигнала FMCW, тем самым генерируя второй сигнал AFMCW, при этом амплитуда второй части сигнала FMCW модулируется в соответствии с периодом амплитудной модуляции, а период амплитудной модуляции предварительно определяется на основе порогового расстояния определения дальности, причем второй сигнал AFMCW может использоваться для усиления отраженного сигнала; детектор, выполненный с возможностью усиления отраженного сигнала на основе второго сигнала AFMCW путем увеличения усиления отраженного сигнала в зависимости от расстояния до объекта от лидарной системы, тем самым генерируя усиленный отраженный сигнал, и усиленный отраженный сигнал указывает на расстояние до объекта от лидарной системы.
[00039] В соответствии с пятым широким аспектом настоящей технологии предложена лидарная система, которая имеет пороговое расстояние определения дальности, причем пороговое расстояние определения дальности указывает на самое большое расстояние, на котором лидарная система выполнена с возможностью обнаружения объекта. Лидарная система содержит: источник света, выполненный с возможностью генерирования непрерывной волны; частотный модулятор, выполненный с возможностью модуляции частоты непрерывной волны, тем самым генерируя сигнал непрерывного излучения с частотной модуляцией (FMCW); и амплитудный модулятор, выполненный с возможностью модуляции амплитуды сигнала FMCW, тем самым генерируя сигнал непрерывного излучения с амплитудно-частотной модуляцией (AFMCW), причем амплитуда сигнала FMCW модулируется в соответствии с периодом амплитудной модуляции, а период амплитудной модуляции предварительно определяется на основе порогового расстояния определения дальности; светоделитель, выполненный с возможностью деления одного из сигнала FMCW и сигнала AFMCW на первую часть и вторую часть, первая часть должна выводиться лидарной системой для отражения от объекта, тем самым генерируя отраженный сигнал, а вторая часть должна использоваться для усиления отраженного сигнала; и детектор, выполненный с возможностью усиления отраженного сигнала на основе второй части путем увеличения усиления отраженного сигнала пропорционально расстоянию до объекта от лидарной системы, тем самым генерируя усиленный отраженный сигнал, и усиленный отраженный сигнал указывает на расстояние до объекта от лидарной системы.
[00040] В соответствии с шестым широким аспектом настоящей технологии предложена лидарная система, которая имеет пороговое расстояние определения дальности, причем пороговое расстояние определения дальности указывает на самое большое расстояние, на котором лидарная система выполнена с возможностью обнаружения объекта. Лидарная система содержит: источник света, выполненный с возможностью генерирования непрерывной волны; частотный модулятор, выполненный с возможностью модуляции частоты непрерывной волны, тем самым генерируя сигнал непрерывного излучения с частотной модуляцией (FMCW); и амплитудный модулятор, выполненный с возможностью модуляции амплитуды по меньшей мере части сигнала FMCW, тем самым генерируя сигнал непрерывного излучения с амплитудно-частотной модуляцией (AFMCW), при этом амплитуда по меньшей мере части сигнала FMCW модулируется в соответствии с периодом амплитудной модуляции, и период амплитудной модуляции предварительно определяется на основе порогового расстояния определения дальности; светоделитель, выполненный с возможностью деления одного из сигнала FMCW и сигнала AFMCW на первую часть и вторую часть, первая часть предназначена для генерирования выходного сигнала лидарной системой для отражения от объекта, тем самым генерируя отраженный сигнал, и вторая часть предназначена для генерирования опорного сигнала для усиления отраженного сигнала; и детектор, выполненный с возможностью усиления отраженного сигнала на основе опорного сигнала путем увеличения усиления отраженного сигнала в зависимости от расстояния до объекта от лидарной системы, тем самым генерируя усиленный отраженный сигнал, и усиленный отраженный сигнал указывает на расстояние до объекта от лидарной системы.
[00041] В соответствии с седьмым широким аспектом настоящей технологии предоставляется способ работы лидарной системы. Лидарная система имеет пороговое расстояние определения дальности, причем пороговое расстояние определения дальности указывает на наибольшее расстояние, на котором лидарная система выполнена с возможностью обнаружения объекта. Способ может выполняться лидарной системой. Способ включает в себя: создание, посредством лидарной системы, непрерывной волны; модуляцию, посредством лидарной системы, частоты непрерывной волны для генерирования сигнала непрерывной волны с частотной модуляцией (FMCW); модуляцию, посредством лидарной системы, амплитуды сигнала FMCW для генерирования сигнала непрерывной волны с амплитудно-частотной модуляцией (AFMCW), причем модуляция амплитуды включает в себя модуляцию, посредством лидарной системы, амплитуды в соответствии с периодом амплитудной модуляции и период амплитудной модуляции предварительно определяется на основе порогового расстояния определения дальности; разделение, посредством лидарной системы, одного из сигнала FMCW и сигнала AFMCW на первую часть и вторую часть, первая часть должна выводиться лидарной системой для отражения от объекта, тем самым генерируя отраженный сигнал, и вторая часть должна использоваться для усиления отраженного сигнала; и усиление, посредством лидарной системы, отраженного сигнала на основе второй части путем увеличения усиления отраженного сигнала в зависимости от расстояния до объекта от лидарной системы, тем самым генерируя усиленный отраженный сигнал, и усиленный отраженный сигнал указывает на расстояние до объекта от лидарной системы.
[00042] В некоторых реализациях способа способ дополнительно включает в себя прием посредством лидарной системы отраженного сигнала.
[00043] В некоторых реализациях способа лидарная система разделяет сигнал AFMCW; и вторая часть сигнала AFMCW используется для усиления отраженного сигнала.
[00044] В некоторых реализациях способа лидарная система разделяет сигнал FMCW; и модуляция амплитуды сигнала FMCW включает в себя модуляцию посредством лидарной системы амплитуды второй части сигнала FMCW.
[00045] В некоторых реализациях способа модуляция амплитуды сигнала FMCW включает в себя: создание посредством лидарной системы сигнала AFMCW, имеющего непрерывно увеличивающуюся амплитуду в пределах периода амплитудной модуляции.
[00046] В некоторых реализациях способа частота непрерывной волны модулируется в соответствии с периодом частотной модуляции; и период частотной модуляции равен периоду амплитудной модуляции.
[00047] В некоторых реализациях способа период амплитудной модуляции предварительно определяется как значение времени, соответствующее промежутку времени между: первым моментом времени, когда вторая часть выводится из лидарной системы; и вторым моментом времени, когда отраженный сигнал будет принят детектором, если объект находится на пороговом расстоянии определения дальности от лидарной системы.
[00048] В некоторых реализациях способа усиленный отраженный сигнал дополнительно указывает скорость объекта относительно лидарной системы.
[00049] В некоторых реализациях способа лидарная система установлена в самоуправляемый автомобиль (SDC).
[00050] В некоторых реализациях способа способ дополнительно содержит управление работой SDC на основе расстояния до объекта.
[00051] В контексте настоящего описания «источник излучения» в широком смысле относится к любому устройству, выполненному с возможностью испускания излучения, такого как сигнал излучения в форме луча. Источник излучения включает в себя, но не ограничивается этим, источник света, выполненный с возможностью излучения световых лучей. Источником света может быть лазер, такой как твердотельный лазер, лазерный диод, лазер высокой мощности, или альтернативный источник света, такой как источник света на основе светоизлучающих диодов (LED). Некоторыми (не ограничивающими) примерами источника света являются лазерный диод Фабри-Перо, лазер с квантовыми ямами, лазер с распределенным брэгговским отражателем (DBR), лазер с распределенной обратной связью (DFB), волоконный лазер или лазер поверхностного излучения с вертикальным резонатором (VCSEL). Кроме того, источник света может излучать световые лучи в различных форматах, таких как световые импульсы, непрерывные волны (CW), квазинепрерывные волны и так далее. В некоторых неограничивающих примерах источник света может включать в себя лазерный диод, выполненный с возможностью излучения света с длиной волны от примерно 650 нм до 1150 нм. В качестве альтернативы, источник света может включать в себя лазерный диод, выполненный с возможностью излучения световых лучей с длиной волны от примерно 800 нм до примерно 1000 нм, от примерно 850 нм до примерно 950 нм, от примерно 1300 нм до примерно 1600 нм или в любым другом подходящем диапазоне. Если не указано иное, термин «примерно» применительно к числовому значению определяется как отклонение до 10% от указанного значения.
[00052] В контексте настоящего описания «выходной луч» может упоминаться как луч излучения, такой как световой луч, который формируется источником излучения и направлен вниз по диапазону к интересующей области. Выходной луч может иметь один или несколько параметров, таких как: длительность луча, угловая дисперсия луча, длина волны, мгновенная мощность, плотность фотонов на разных расстояниях от источника света, средняя мощность, интенсивность мощности луча, ширина луча, частота повторения луча, последовательность лучей, скважность импульса, длина волны или фаза и т.д. Выходной луч может быть неполяризованным или произвольно поляризованным, может не иметь определенной или фиксированной поляризации (например, поляризация может меняться со временем) или может иметь конкретную поляризацию (например, линейную поляризацию, эллиптическую поляризацию или круговую поляризацию).
[00053] Кроме того, в контексте настоящего описания выходной луч также может упоминаться как непрерывная (электромагнитная) волна, имеющая определенные характеристики, такие как частота, амплитуда, фаза и длина волны, испускаемая источником света. Соответственно, непрерывная волна с частотной модуляцией (FMCW) может упоминаться как «выходной луч FMCW», а FMCW, дополнительно модулированная по амплитуде, может упоминаться как «выходной луч AFMCW».
[00054] В контексте настоящего описания термин «частотная модуляция» в широком смысле относится к изменению частоты непрерывной волны во времени (волны несущей частоты) в соответствии с предопределенным законом частоты, представленным функцией частотной модуляции, такой как, но, не ограничиваясь этим, синусоидальный сигнал, пилообразный сигнал, сигнал треугольника, например, для кодирования определенных данных на частоте непрерывной волны, оставляя неизменными амплитуду и фазу непрерывной волны, тем самым генерируя FMCW.
[00055] В контексте настоящей технологии термин «амплитудная модуляция» в широком смысле относится к изменению амплитуды непрерывной волны и/или FMCW во времени (амплитудной несущей волны) в соответствии с предварительно заданным законом амплитуды, представленным модулирующим амплитуду сигналом, таким как, но без ограничения, линейный сигнал, сигнал на основе асимптотической функции и т.п., для кодирования определенных данных в амплитуде непрерывной волны и/или FMCW, оставляя частоту и фазу неизменными, тем самым генерируя амплитудно-модулирующую непрерывную волну (AMCW) и/или непрерывную волну с амплитудно-частотной модуляцией (AFMCW), соответственно.
[00056] В контексте настоящего описания «входной луч» может также называться лучом излучения, таким как луч света, отраженный от одного или нескольких объектов в интересующей области (ROI). Под отражением подразумевается, что по меньшей мере часть выходного луча, падающего на один или несколько объектов в ROI, отражается от одного или нескольких объектов. Входной луч может иметь один или несколько параметров, таких как: время пролета (то есть время от излучения до обнаружения), мгновенная мощность (например, сигнатура мощности), средняя мощность во всем отраженном импульсе и распределение фотонов/сигнал в периоде отраженного импульса и т.д.
[00057] В контексте настоящего описания «интересующая область» может в широком смысле включать в себя часть наблюдаемой среды лидарной системы, в которой один или несколько объектов могут быть обнаружены. Следует отметить, что на интересующую область лидарной системы могут влиять различные условия, такие как, но не ограничиваясь ими: ориентация лидарной системы (например, направление оптической оси лидарной системы); положение лидарной системы по отношению к окружающей среде (например, расстояние над землей и прилегающий рельеф местности и препятствия); рабочие параметры лидарной системы (например, мощность излучения, вычислительные настройки, заданные углы работы) и т.д. ROI лидарной системы может быть определены, например, плоским углом или телесным углом. В одном примере ROI также может быть определена в определенном диапазоне (например, до 200 м или около того).
[00058] В контексте настоящей спецификации «сервер» - это компьютерная программа, которая работает на соответствующем аппаратном обеспечении и способна принимать запросы (например, от электронных устройств) по сети и выполнять эти запросы или вызывать выполнение этих запросов. Аппаратное обеспечение может быть реализовано как один физический компьютер или одна физическая компьютерная система, но ни то, ни другое не требуется в отношении настоящей технологии. В данном контексте использование выражения «сервер» не предназначено для обозначения того, что каждая задача (например, полученные инструкции или запросы) или любая конкретная задача будет получена, выполнена или вызвана к выполнению тем же сервером (то есть такое же программное обеспечение и/или аппаратное обеспечение); оно предназначено для обозначения, что любое количество программных элементов или аппаратных устройств может быть вовлечено в прием/отправку, выполнение или обеспечение выполнения любой задачи или запроса, или последствий любой задачи или запроса; и все это программное и аппаратное обеспечение может быть одним сервером или несколькими серверами, и оба случая включены в выражение «по меньшей мере один сервер».
[00059] В контексте настоящего описания «электронное устройство» - это любое компьютерное аппаратное обеспечение, которое способно запускать программное обеспечение, подходящее для соответствующей решаемой задачи. В контексте настоящего описания термин «электронное устройство» подразумевает, что устройство может функционировать как сервер для других электронных устройств, однако это не обязательно в отношении настоящей технологии. Таким образом, некоторые (не ограничивающие) примеры электронных устройств включают в себя самоуправляемый блок, персональные компьютеры (настольные компьютеры, ноутбуки, нетбуки и т.д.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Следует понимать, что в данном контексте тот факт, что устройство функционирует как электронное устройство, не означает, что оно не может функционировать как сервер для других электронных устройств.
[00060] В контексте настоящего описания выражение «информация» включает в себя информацию любого характера или вида, которая может быть сохранена в базе данных. Таким образом, информация включает в себя, помимо прочего, визуальные произведения (например, карты), аудиовизуальные произведения (например, изображения, фильмы, звукозаписи, презентации и т.д.), данные (например, данные о местоположении, данные о погоде, данные о дорожном движении, числовые данные и т.д.), текст (например, мнения, комментарии, вопросы, сообщения и т.д.), документы, электронные таблицы и т.д.
[00061] В контексте настоящего описания «база данных» - это любой структурированный набор данных, независимо от его конкретной структуры, программного обеспечения для управления базой данных или компьютерного аппаратного обеспечения, на котором данные хранятся, реализованы или иным образом доступны для использования. База данных может находиться на том же аппаратном обеспечении, что и процесс, который хранит или использует информацию, хранящуюся в базе данных, или она может находиться на отдельном оборудовании, например на выделенном сервере или множестве серверов.
[00062] В контексте настоящего описания слова «первый», «второй», «третий» и т.д. использовались в качестве прилагательных только с целью обеспечения различия между существительными, которые они отличают друг от друга, а не с целью описания каких-либо конкретных отношений между этими существительными. Кроме того, как обсуждается здесь в других контекстах, ссылка на «первый» элемент и «второй» элемент не препятствует тому, чтобы эти два элемента были одним и тем же фактическим элементом реального мира.
[00063] Каждая из реализаций настоящей технологии обладает по меньшей мере одним из вышеупомянутых аспектов и/или цели, но не обязательно имеет их все. Следует понимать, что некоторые аспекты настоящей технологии, которые возникли в попытке достичь вышеупомянутой цели, могут не удовлетворять этой цели и/или удовлетворять другим целям, которые не описаны в данном документе явным образом.
[00064] Дополнительные и/или альтернативные признаки, аспекты и преимущества реализаций настоящей технологии станут очевидными из нижеследующего описания, сопроводительных чертежей и приложенной формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00065] Эти и другие признаки, аспекты и преимущества настоящей технологии станут более понятными из нижеследующего описания, приложенной формулы изобретения и сопроводительных чертежей, на которых:
[00066] Фиг. 1 изображает принципиальную схему примерной компьютерной системы для реализации некоторых неограничивающих вариантов осуществления систем и/или способов настоящей технологии;
[00067] Фиг. 2 изображает сетевую вычислительную среду, подходящую для использования с некоторыми неограничивающими вариантами осуществления настоящей технологии;
[00068] Фиг. 3 изображает принципиальную схему примерной лидарннй системы для реализации некоторых неограничивающих вариантов осуществления систем и/или способов настоящей технологии;
[00069] Фиг. 4 изображает представление оптического сигнала на основе непрерывных волн (на основе CW), используемого в лидарной системе на фиг. 3, обнаруживающего объекты в окружении транспортного средства, присутствующего в сетевой вычислительной среде на фиг. 2, в соответствии с неограничивающими вариантами осуществления настоящей технологии;
[00070] Фиг. 5 изображает представление первой примерной функции частотной модуляции, используемой в лидарной системе по фиг. 3, в соответствии с неограничивающими вариантами осуществления настоящей технологии;
[00071] Фиг. 6 изображает представление второй примерной функции частотной модуляции, используемой в лидарной системе по фиг. 3, в соответствии с неограничивающими вариантами осуществления настоящей технологии;
[00072] Фиг. 7 изображает принципиальную схему способа определения данных объекта, расположенного в окружении транспортного средства, присутствующего в сетевой вычислительной среде на фиг. 2, на основе данных, полученных лидарной системой по Фиг. 3, в соответствии с неограничивающими вариантами осуществления настоящей технологии;
[00073] Фиг. 8 изображает первую реализацию лидарной системы по Фиг. 3 в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии;
[00074] Фиг. 9 изображает представление первой примерной функции амплитудной модуляции, используемой в лидарной системе по фиг. 3, в соответствии с неограничивающими вариантами осуществления настоящей технологии;
[00075] Фиг. 10 изображает представление второй примерной функции амплитудной модуляции, используемой в лидарной системе по Фиг. 3, в соответствии с неограничивающими вариантами осуществления настоящей технологии;
[00076] Фиг. 11 изображает принципиальную схему первого примерного способа усиления входного оптического сигнала на основе CW лидарной системы по фиг. 10 в соответствии с неограничивающими вариантами осуществления настоящей технологии;
[00077] Фиг. 12 изображает принципиальную схему второго примерного способа усиления входного оптического сигнала на основе CW лидарной системы по фиг. 10 в соответствии с неограничивающими вариантами осуществления настоящей технологии;
[00078] Фиг. 13 изображает вторую реализацию лидарной системы, показанной на фиг. 3, в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии;
[00079] Фиг. 14 изображает принципиальную схему первого примерного способа усиления входного оптического сигнала на основе CW лидарной системы по фиг. 13 в соответствии с неограничивающими вариантами осуществления настоящей технологии;
[00080] Фиг. 15 изображает принципиальную схему второго примерного способа усиления входного оптического сигнала на основе CW лидарной системы по фиг. 13 в соответствии с неограничивающими вариантами осуществления настоящей технологии;
[00081] Фиг. 16 изображает третью реализацию лидарной системы по Фиг. 3 в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии;
[00082] Фиг. 17 изображает принципиальную схему первого примерного способа усиления входного оптического сигнала на основе CW лидарной системы по фиг. 16 в соответствии с неограничивающими вариантами осуществления настоящей технологии;
[00083] Фиг. 18 изображает принципиальную схему второго примерного способа усиления входного оптического сигнала на основе CW лидарной системы по фиг. 13 в соответствии с неограничивающими вариантами осуществления настоящей технологии;
[00084] Фиг. 19 изображает четвертую реализацию лидарной системы по Фиг. 3 в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии;
[00085] Фиг. 20 изображает принципиальную схему первого примерного способа усиления входного оптического сигнала на основе CW лидарной системы по Фиг. 19 в соответствии с неограничивающими вариантами осуществления настоящей технологии;
[00086] Фиг. 21 изображает принципиальную схему второго примерного способа усиления входного оптического сигнала на основе CW лидарной системы по фиг. 19 в соответствии с неограничивающими вариантами осуществления настоящей технологии;
[00087] Фиг. 22 изображает принципиальную схему третьего примерного способа усиления входного оптического сигнала на основе CW лидарной системы по фиг. 19 в соответствии с неограничивающими вариантами осуществления настоящей технологии;
[00088] Фиг. 23 изображает принципиальную схему четвертого примерного способа усиления входного оптического сигнала на основе CW лидарной системы по фиг. 19 в соответствии с неограничивающими вариантами осуществления настоящей технологии;
[00089] Фиг. 24 изображает блок-схему способа работы лидарной системы по фиг. 3 в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии.
Подробное описание
[00090] Приведенные в данном документе примеры и условные формулировки призваны главным образом помочь читателю понять принципы настоящей технологии, а не ограничить ее объем такими конкретно приведенными примерами и условиями. Должно быть понятно, что специалисты в данной области смогут разработать различные механизмы, которые, хоть и не описаны в данном документе явным образом, тем не менее воплощают принципы настоящей технологии и включаются в ее суть и объем.
[00091] Кроме того, нижеследующее описание может описывать реализации настоящей технологии в относительно упрощенном виде для целей упрощения понимания. Специалисты в данной области поймут, что различные реализации настоящей технологии могут иметь большую сложность.
[00092] В некоторых случаях также могут быть изложены примеры модификаций настоящей технологии, которые считаются полезными. Это делается лишь для содействия пониманию и, опять же, не для строгого определения объема или очерчивания границ настоящей технологии. Эти модификации не являются исчерпывающим списком, и специалист в данной области может осуществлять другие модификации, все еще оставаясь при этом в рамках объема настоящей технологии. Кроме того, случаи, когда примеры модификаций не приводятся, не следует толковать так, что никакие модификации не могут быть осуществлены и/или что описанное является единственным способом реализации такого элемента настоящей технологии.
[00093] Более того, все утверждения в данном документе, излагающие принципы, аспекты и реализации технологии, а также их конкретные примеры, предназначены для охвата как их структурных, так и функциональных эквивалентов, независимо от того, известны они в настоящее время или разрабатываются в будущем. Таким образом, например, специалисты в данной области осознают, что любые блок-схемы в данном документе представляют концептуальные виды иллюстративной схемы, воплощающей принципы настоящей технологии. Аналогичным образом, будет понятно, что любые блок-схемы, схемы последовательности операций, схемы изменения состояний, псевдо-коды и подобное представляют различные процессы, которые могут быть по сути представлены на считываемых компьютерам носителях и исполнены компьютером или процессором вне зависимости от того, показан такой компьютер или процессор явным образом или нет.
[00094] Функции различных элементов, показанных на фигурах, включая любой функциональный блок, обозначенный как «процессор», могут быть обеспечены за счет использования специализированного аппаратного обеспечения, а также аппаратного обеспечения, способного выполнять программное обеспечение в сочетании с соответствующим программным обеспечением. При обеспечении процессором функции могут быть обеспечены одним выделенным процессором, одним совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут быть совместно используемыми. Кроме того, явное использование термина «процессор» или «контроллер» не должно истолковываться как относящееся исключительно к аппаратному обеспечению, способному исполнять программное обеспечение, и может в неявной форме включать в себя, без ограничений, аппаратное обеспечение цифрового сигнального процессора (DSP), сетевой процессор, интегральную схему специального назначения (ASIC), программируемую пользователем вентильную матрицу (FPGA), постоянную память (ROM) для хранения программного обеспечения, оперативную память (RAM) и энергонезависимое хранилище. Другое аппаратное обеспечение, традиционное и/или специализированное, также может быть включено в состав.
[00095] Программные модули, или просто модули, в качестве которых может подразумеваться программное обеспечение, могут быть представлены в настоящем документе как любая комбинация элементов блок-схемы последовательности операций или других элементов, указывающих выполнение этапов процесса и/или текстовое описание. Такие модули могут выполняться аппаратным обеспечением, которое явно или неявно показано.
[00096] Учитывая эти основополагающие вещи, рассмотрим некоторые неограничивающие примеры, чтобы проиллюстрировать различные реализации аспектов настоящей технологии.
Компьютерная система
[00097] Ссылаясь первоначально на фиг. 1, на ней изображена принципиальная схема компьютерной системы 100, подходящей для использования с некоторыми реализациями настоящей технологии, компьютерная система 100 содержит различные аппаратные компоненты, включая в себя один или несколько одноядерных или многоядерных процессоров, совместно представленных процессором 110, твердотельный накопитель 120, память 130, которая может быть оперативной памятью или любым другим типом памяти.
[00098] Связь между различными компонентами компьютерной системы 100 может быть обеспечена одной или несколькими внутренними и/или внешними шинами (не показаны) (например, шиной PCI, универсальной последовательной шиной, шиной Firewire IEEE 1394, шиной SCSI, шиной Serial-ATA и т.д.), с которыми различные компоненты аппаратного обеспечения связаны электронным образом. Согласно вариантам осуществления настоящей технологии твердотельный накопитель 120 хранит программные инструкции, подходящие для загрузки в память 130 и выполнения процессором 110 для определения присутствия объекта. Например, программные инструкции могут быть частью приложения управления транспортным средством, выполняемого процессором 110. Следует отметить, что компьютерная система 100 может иметь дополнительные и/или опциональные компоненты (не показаны), такие как модули сетевой связи, модули определения местоположения и т.п.
Сетевая компьютерная среда
[00099] Фиг. 2 изображает принципиальную схему сетевой компьютерной среды 200, подходящей для использования с некоторыми вариантами осуществления систем и/или способов настоящей технологии. Сетевая компьютерная среда 200 содержит электронное устройство 210, связанное с транспортным средством 220 и/или связанное с пользователем (не изображенным), который связан с транспортным средством 220, таким как оператор транспортного средства 220, сервер 235, поддерживающий связь с электронным устройством 210 через сеть 240 связи (например, Интернет и т.п., как будет описано более подробно ниже).
[000100] Опционально, сетевая компьютерная среда 200 может также включать в себя спутник GPS (не показан), передающий и/или принимающий сигнал GPS на/от электронного устройства 210. Следует понимать, что настоящая технология не ограничивается GPS и может использовать технологию определения местоположения, отличную от GPS. Следует отметить, что спутник GPS можно вообще не использовать.
[000101] Транспортное средство 220, с которым связано электронное устройство 210, может включать в себя любое транспортное средство для отдыха или иного, такое как частный или коммерческий автомобиль, грузовик, мотоцикл и т.п. Хотя транспортное средство 220 изображено как наземное транспортное средство, это может быть не так в каждом варианте осуществления настоящей технологии. Например, транспортное средство 220 может быть судном, таким как лодка, или летательным аппаратом, например летающим дроном.
[000102] Транспортное средство 220 может управляться пользователем или транспортным средством без водителя. По меньшей мере в некоторых вариантах осуществления настоящей технологии предполагается, что транспортное средство 220 может быть реализовано как самоуправляемый автомобиль (SDC). Следует отметить, что конкретные параметры транспортного средства 220 не являются ограничивающими, эти конкретные параметры включают в себя: производителя транспортного средства, модель транспортного средства, год выпуска транспортного средства, вес транспортного средства, размеры транспортного средства, распределение веса транспортного средства, площадь поверхности транспортного средства, высоту транспортного средства, тип трансмиссии (например, 2x или 4x), тип шин, тормозную систему, топливную систему, пробег, идентификационный номер автомобиля и объем двигателя.
[000103] Реализация электронного устройства 210 особо не ограничивается, но в качестве примера электронное устройство 210 может быть реализовано как блок управления двигателем транспортного средства, центральный процессор транспортного средства, навигационное устройство транспортного средства (например, TomTom™, Garmin™), планшет, персональный компьютер, встроенный в транспортное средство 220, и тому подобное. Таким образом, следует отметить, что электронное устройство 210 может быть или может не быть постоянно связано с транспортным средством 220. Дополнительно или альтернативно электронное устройство 210 может быть реализовано в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиотелефон). В определенных вариантах осуществления электронное устройство 210 имеет дисплей 270.
[000104] Электронное устройство 210 может содержать некоторые или все компоненты компьютерной системы 100, изображенной на фиг. 1. В некоторых вариантах осуществления электронное устройство 210 представляет собой бортовое компьютерное устройство и содержит процессор 110, твердотельный накопитель 120 и память 130. Другими словами, электронное устройство 210 содержит аппаратные средства, и/или программное обеспечение, и/или микропрограммное обеспечение, или их комбинацию для обработки данных, как будет более подробно описано ниже.
[000105] В некоторых вариантах осуществления настоящей технологии сеть 240 связи представляет собой Интернет. В альтернативных неограничивающих вариантах осуществления сеть 240 связи может быть реализована как любая подходящая локальная сеть (LAN), глобальная сеть (WAN), частная сеть связи и т.п. Следует четко понимать, что реализации для сети 240 связи предназначены только для целей иллюстрации. Между электронным устройством 210 и сетью 240 связи предоставляется канал связи (отдельно не пронумерованный), реализация которого будет зависеть, среди прочего, от того, как реализовано электронное устройство 210. Просто в качестве примера, а не ограничения, в тех вариантах осуществления настоящей технологии, где электронное устройство 210 реализовано как устройство беспроводной связи, такое как смартфон или навигационное устройство, канал связи может быть реализован как канал беспроводной связи. Примеры каналов беспроводной связи включают в себя, но не ограничиваются ими, канал в сети связи 3G, канал в сети связи 4G и т.п. Сеть 240 связи также может использовать беспроводное соединение с сервером 235.
[000106] В некоторых вариантах осуществления настоящей технологии сервер 235 реализован как компьютерный сервер и может содержать некоторые или все компоненты компьютерной системы 100, показанной на фиг. 1. В одном неограничивающем примере сервер 235 реализован как сервер Dell™ PowerEdge™ Server под управлением операционной системы Microsoft™ Windows Server™, но также может быть реализован в любом другом подходящем оборудовании, программном обеспечении и/или микропрограммном обеспечении или их комбинации. В изображенных неограничивающих вариантах осуществления настоящей технологии сервер является одним сервером. В альтернативных неограничивающих вариантах осуществления настоящей технологии (не показаны) функциональные возможности сервера 235 могут быть распределены и могут быть реализованы посредством нескольких серверов.
[000107] В некоторых неограничивающих вариантах осуществления настоящей технологии процессор 110 электронного устройства 210 может поддерживать связь с сервером 235 для приема одного или нескольких обновлений. Обновления могут быть, но не ограничиваются, обновлениями программного обеспечения, обновлениями карт, обновлениями маршрутов, обновлениями погоды и т.п. В некоторых вариантах осуществления настоящей технологии процессор 110 также может быть выполнен с возможностью передачи на сервер 235 определенных рабочих данных, таких как пройденные маршруты, данные трафика, данные производительности и тому подобное. Некоторые или все данные, передаваемые между транспортным средством 220 и сервером 235, могут быть зашифрованы и/или анонимизированы.
[000108] Следует отметить, что электронное устройство 210 может использовать различные датчики и системы для сбора информации об окружении 250 транспортного средства 220. Как видно на фиг. 2, транспортное средство 220 может быть оборудовано множеством систем 280 датчиков. Следует отметить, что различные системы датчиков из множества систем 280 датчиков могут использоваться для сбора различных типов данных, касающихся окружения 250 транспортного средства 220.
[000109] В одном примере множество систем 280 датчиков может содержать одну или несколько систем датчиков типа камеры, которые установлены на транспортном средстве 220 и связаны с возможностью осуществления связи с процессором 110. Вообще говоря, одна или несколько систем датчиков типа камеры могут быть выполнены с возможностью сбора данных изображения о различных частях окружения 250 транспортного средства 220. В некоторых случаях данные изображения, предоставленные одной или несколькими системами датчиков типа камеры, могут использоваться электронным устройством 210 для выполнения процедур обнаружения объекта. Например, электронное устройство 210 может быть выполнено с возможностью подачи данных изображения, предоставленных одной или несколькими системами датчиков типа камеры, в нейронную сеть обнаружения объектов (ODNN, Object Detection Neural Network), которая обучена локализовать и классифицировать потенциальные объекты в окружении 250 транспортного средства 220.
[000110] В другом примере множество систем 280 датчиков может содержать одну или несколько систем датчиков радарного типа, которые установлены на транспортном средстве 220 и связаны с возможностью осуществления связи с процессором 110. Вообще говоря, одна или несколько систем датчиков радарного типа могут быть выполнены с возможностью использования радиоволн для сбора данных о различных частях окружения 250 транспортного средства 220. Например, одна или несколько систем датчиков радарного типа могут быть выполнены с возможностью сбора радиолокационных данных о потенциальных объектах в окружении 250 транспортного средства 220, и эти данные могут представлять расстояние объектов от системы датчиков радарного типа, ориентацию объекты, скорость и/или скорость объектов и т.п.
[000111] Следует отметить, что множество систем 280 датчиков может содержать дополнительные типы систем датчиков к тем, которые не исчерпывающе описаны выше, и без отклонения от объема настоящей технологии.
[000112] Кроме того, транспортное средство 220 оборудовано одной или несколькими системами обнаружения и определения дальности с помощью света (LiDAR, лидар) для сбора информации об окружении 250 транспортного средства 220. Лидарные системы могут быть дополнением или в некоторых случаях вместо множества систем 280 датчиков. Данная лидарная система 230 из одной или нескольких лидарных систем может быть установлена или модифицирована на транспортном средстве 220 в различных местах и/или во множестве конфигураций.
[000113] Например, данная лидарная система 230 может быть установлена на внутренней верхней части лобового стекла транспортного средства 220. Тем не менее, как показано на фиг. 2, другие места для установки данной лидарной системы 230 находятся в пределах объема настоящего раскрытия, включая заднее окно, боковые окна, передний капот, крышу, переднюю решетку, передний бампер или боковую часть транспортного средства 220. В некоторых случаях данная лидарная система 230 может быть даже установлена в специальном корпусе, установленном на верхней части транспортного средства 220.
[000114] Как упомянуто выше, лидарная система 230 также может быть установлена в различных конфигурациях.
[000115] В одном варианте осуществления, таком как показанный на фиг. 2, данная лидарная система 230 из одной или нескольких лидарных систем установлена на крыше транспортного средства 220 во вращающейся конфигурации. Например, данная лидарная система 230, установленная на транспортном средстве 220 во вращающейся конфигурации, может содержать по меньшей мере некоторые компоненты, которые могут вращаться на 360 градусов вокруг оси вращения данной лидарной системы 230. Следует отметить, что данная лидарная система 230, установленная во вращающихся конфигурациях, может собирать данные о большинстве частей окружения 250 транспортного средства 220.
[000116] В другом варианте осуществления, таком как показанный на фиг. 2, данная лидарная система 230 из одной или нескольких лидарных систем установлена сбоку или на передней решетке, например, в невращающейся конфигурации. Например, данная лидарная система 230, установленная на транспортном средстве 220 в невращающейся конфигурации, может содержать по меньшей мере некоторые компоненты, которые не могут поворачиваться на 360 градусов и выполнены с возможностью сбора данных о предварительно определенных частях окружения 250 транспортного средства 220.
[000117] Независимо от конкретного местоположения и/или конкретной конфигурации данной лидарной системы 230, лидарная система 230 выполнена с возможностью сбора данных об окружении 250 транспортного средства 220 для построения многомерной карты объектов в окружении 250 транспортного средства 220. Теперь будет описано, как данная лидарная система 230 выполнена с возможностью сбора данных об окружении 250 транспортного средства 220.
Лидарная система
[000118] Со ссылкой на фиг. 3 изображена принципиальная схема неограничивающего примера лидарной системы 302. Следует отметить, что лидарная система 230 (присутствующая в сетевой компьютерной среде, изображенной на фиг. 2) может быть реализована аналогично реализации лидарной системы 302.
[000119] В общем, работа лидарной системы 302 может быть описана следующим образом: источник света (такой как компонент 306 источника света) лидарной системы 302 посылает выходной световой луч для обнаружения/захвата данных априори неизвестных объектов (таких как объект 325) в окружении 250 транспортного средства 220, например, для формирования его многомерной карты, где объекты (включая объект 325) представлены в форме одной или нескольких точек данных.
[000120] Например, предположим, что объект 325 расположен на расстоянии 390 от лидарной системы 302. Как только выходной световой луч достигает объекта 325, объект 325 может отражать по меньшей мере часть света из выходного светового луча, и некоторые из отраженных световых лучей могут возвращаться обратно в лидарную систему 302 в форме входного светового луча. Под отражением подразумевается, что по меньшей мере часть светового луча из выходного светового луча отскакивает от объекта 325. Часть светового луча из выходного светового луча может поглощаться объектом 325.
[000121] Соответственно, входящий световой луч улавливается лидарной системой 302 через компонент 312 приемника. Наконец, путем измерения времени между излучением выходного светового луча и приемом входного светового луча, как будет более подробно объяснено ниже, расстояние 390 до объекта 325 может быть вычислено, например, компонентом 316 контроллера.
[000122] В неограничивающих вариантах осуществления настоящей технологии лидарная система 302 может быть лидарной системой непрерывной волны с частотной модуляцией (лидарная система FMCW). В этих вариантах осуществления компонент 306 источника света может содержать один или несколько лазеров непрерывного действия. В этих вариантах осуществления компонент 306 источника света выполнен с возможностью непрерывного испускания излучения в форме светового луча с предварительно определенной длиной волны (например, выходного луча 317 CW). Соответственно, для приема данных об объекте 325 лидарная система 302 может быть выполнена с возможностью модуляции частоты выходного луча 317 CW, тем самым генерируя выходной луч 318 FMCW, который далее разделяется на сканирующий луч 320 FMCW и опорный луч 322 FMCW. И, наконец, лидарная система 302 дополнительно выполнена с возможностью сравнивать определенные характеристики входного светового луча (такого как входной луч 324 FMCW), отраженного от объекта 325, и опорного луча 322 FMCW. Таким образом, лидарная система 302 может быть выполнена с возможностью вычисления расстояния 390 до объекта 325 и, например, его мгновенной скорости. Как лидарная система 302 выполнена с возможностью работы для определения данных объекта 325, будет описано сразу со ссылкой на фиг. 3 и со ссылками на фиг. 4-7.
[000123] Вообще говоря, лидарная система 302 может содержать множество внутренних компонентов, таких как, но не ограничиваясь ими: (i) компонент 304 источника света непрерывной волны с частотной модуляцией (FMCW); (ii) компонент 310 светоделителя; (iii) компонент 314 сканера, (iv) компонент 312 приемника (также называемый здесь «системой обнаружения» или «детектором») и (v) компонент 316 контроллера. Предполагается, что в дополнение к внутренним компонентам, не исчерпывающим образом перечисленным выше, лидарная система 302 может дополнительно содержать множество датчиков (таких как, например, датчик температуры, датчик влажности и т.д.), которые не показаны на фиг. 3 для ясности.
[000124] В некоторых неограничивающих вариантах осуществления настоящей технологии один или несколько внутренних компонентов лидарной системы 302 могут быть реализованы в общем корпусе 330, как показано на фиг. 3. В других неограничивающих вариантах осуществления настоящей технологии по меньшей мере компонент 316 контроллера может быть расположен вне общего корпуса 330 и, опционально, удаленно от него.
Компонент источника света FMCW
[000125] Согласно неограничивающим вариантам осуществления настоящей технологии компонент 304 источника света FMCW выполнен с возможностью формирования светового луча, представляемого световым лучом FMCW (например, выходным лучом 318 FMCW). С этой целью в неограничивающих вариантах осуществления настоящей технологии компонент 304 источника света FMCW содержит компонент 306 источника света (также называемый «компонентом источника излучения») и компонент 308 частотной модуляции (FM).
[000126] Следует четко понимать, что компонент 304 источника света FMCW может дополнительно включать в себя другие компоненты, которые для ясности опущены на фиг. 3, которые могут включать, помимо прочего, оптические компоненты, такие как линзы, призмы, зеркала, коллиматоры, поляризаторы и т.п. для формирования и направления выходного луча 318 FMCW дальше через лидарную систему 302, преобразуя его в сканирующий луч 320 FMCW, который в конечном итоге направляется далее к окружению 250 транспортного средства 220.
[000127] В некоторых неограничивающих вариантах осуществления настоящей технологии компонент 306 источника света и компонент 308 FM, наряду с другими компонентами компонента 304 источника света FMCW, могут быть установлены независимо в общем корпусе 330 лидарной системы 302. В других неограничивающих вариантах осуществления настоящей технологии компонент 306 источника света и компонент 308 FM могут быть заключены в отдельный корпус (отдельно не изображен).
[000128] Кроме того, следует отметить, что по меньшей мере в некоторых неограничивающих вариантах осуществления настоящей технологии компонент 304 источника света FMCW может поворачиваться, например, на 360 градусов или меньше, вокруг оси вращения (не изображена) лидарной системы 302, когда лидарная система 302 реализована во вращающейся конфигурации. Однако в других вариантах осуществления компонент 304 источника света FMCW может быть стационарным, даже когда лидарная система 302 реализована во вращающейся конфигурации, не выходя за рамки объема настоящей технологии.
Компонент источника света
[000129] Компонент 306 источника света связан с возможностью осуществления связи с компонентом 316 контроллера и выполнен с возможностью испускания излучения, такого как сигнал излучения в форме луча. В некоторых вариантах осуществления компонент 306 источника света выполнен с возможностью излучения света. Компонент 306 источника света содержит один или несколько лазеров, которые излучают свет с определенной рабочей длиной волны. Рабочая длина волны компонента 306 источника света может находиться в инфракрасной, видимой и/или ультрафиолетовой частях электромагнитного спектра. Например, компонент 306 источника света может включать в себя один или несколько лазеров с рабочей длиной волны от примерно 650 нм до 1150 нм. В качестве альтернативы, компонент 306 источника света может включать в себя лазерный диод, выполненный с возможностью излучения света с длиной волны от примерно 800 нм до примерно 1000 нм, от примерно 850 нм до примерно 950 нм или от примерно 1300 нм до примерно 1600 нм. Однако следует отметить, что компонент 306 источника света может включать в себя лазеры с разными рабочими длинами волн, не выходя за рамки настоящей технологии. В некоторых других неограничивающих вариантах осуществления настоящей технологии компонент 306 источника света содержит светоизлучающий диод (LED).
[000130] В соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии компонент 306 источника света может быть выполнен с возможностью излучения светового луча, представляемого непрерывной волной рабочей длины волны. С этой целью, как упоминалось выше, компонент 306 источника света может включать в себя один или несколько лазеров непрерывного действия для формирования выходного луча 317 CW.
[000131] Вообще говоря, в контексте настоящего описания, данный лазер непрерывного действия (или иначе, лазер, выполненный с возможностью работы в режиме непрерывной волны) широко называется источником лазерного излучения, который выполнен с возможностью излучения непрерывного луча света (такого как выходной луч 317 CW), представленного электромагнитной волной предварительно заданной длины волны с постоянной амплитудой и частотой, который, таким образом, может характеризоваться относительно стабильной выходной мощностью.
[000132] В соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии, выходной луч 317 CW может быть представлен электрическим сигналом непрерывной волны (напряжением или током), например, в форме синусоидальной формы волны.
[000133] Со ссылкой на фиг. 4 изображено представление электрического сигнала 400 CW, формируемого компонентом 316 контроллера на основе выходного луча 317 CW, излучаемого компонентом 306 источника света лидарной системы 302, в соответствии с неограничивающими вариантами осуществления настоящей технологии.
[000134] Как можно понять из фиг. 4, электрический сигнал 400 CW может характеризоваться по меньшей мере следующими параметрами: период 402 колебаний CW, T, и амплитуда 406 CW, A. Кроме того, на основе этих параметров и, например, скорости света могут быть получены другие параметры электрического сигнала 400 CW, такие как частота 404 CW, f, и длина волны 408 CW, λ (рабочая длина волны компонента 306 источника света). Формально электрический сигнал 400 CW выходного луча 317 CW может быть определен как функция времени γ(t), например, с помощью следующего уравнения:
y(t) = Asin(ωt+φ), (1)
где A - амплитуда 406 CW;
ω - угловая частота CW, определяемая как 2πf (2π, умноженное на частоту 404 CW);
φ - фаза колебаний (отдельно не изображена); а также
t - время.
[000135] Следует отметить, что некоторые из вышеупомянутых характеристик электрического сигнала 400 CW выходного луча 317 CW (например, период 402 колебаний CW и, следовательно, частота 404 CW) могут зависеть от рабочей длины волны компонента 306 источника света, который дополнительно связан с различными типами (определяемыми, например, используемыми в нем усиливающими средами лазера) одного или нескольких лазеров непрерывного действия, которые включает в себя компонент 306 источника света.
[000136] В некоторых неограничивающих вариантах осуществления настоящей технологии компонент 306 источника света может содержать один или несколько лазерных диодов, таких как, но не ограничиваясь ими: лазерный диод Фабри-Перо, лазер с квантовыми ямами, лазер с распределенным брэгговским отражателем (DBR), лазер с распределенной обратной связью (DFB) или лазер с поверхностным излучением с вертикальным резонатором (VCSEL). В качестве примеров, данный лазерный диод, работающий в компоненте 306 источника света, может быть лазерным диодом на основе арсенида алюминия-галлия (AlGaAs), лазерным диодом на основе арсенида индия-галлия (InGaAs) или лазерным диодом на основе арсенид-фосфида индия-галлия (InGaAsP) или любым другим подходящим лазерным диодом. Следует четко понимать, что другие типы лазеров, связанные с соответствующей усиливающей средой лазера, позволяющие компоненту 306 источника света работать в непрерывном режиме работы, могут использоваться, не выходя за рамки настоящей технологии, такие как газовые лазеры, твердотельные лазеры, химические лазеры и т.п.
[000137] Предполагается, что лидарная система 302 может содержать безопасный для глаз лазер, или, другими словами, лидарная система 302 может быть классифицирована как безопасная для глаз лазерная система или лазерное изделие. Вообще говоря, безопасный для глаз лазер, лазерная система или лазерное изделие может быть системой с некоторыми или всеми из: длины волны излучения, средней мощности, пиковой мощности, пиковой интенсивности, энергии импульса, размера луча, расходимости луча, времени экспозиции, или сканированного выходного луча, такого, что излучаемый этой системой свет, имеет малую или не имеет возможность нанести вред глазам человека.
[000138] Кроме того, предполагается, что использование компонента 306 источника света, содержащего один или несколько лазеров непрерывного действия, обеспечивает более безопасную работу лидарной системы 302 с точки зрения защиты глаз человека от повреждения. В частности, в такой конфигурации компонента 306 источника света лидарная система 302 может быть выполнена с возможностью регистрации данных объекта 325 с использованием выходного луча 317 CW, длина волны которого выходит за пределы спектра видимого света (например, в инфракрасном спектре), что позволяет увеличить мощность выходного луча 317 CW еще без риска повредить зрение человека. Наконец, использование выходного луча 317 CW вне спектра видимого света может дополнительно повысить устойчивость лидарной системы 302 к солнечному свету и другим излучениям, таким как излучение, испускаемое другими лидарными системами. Таким образом, в некоторых неограничивающих вариантах осуществления лидарная система 302 может обеспечивать повышенную безопасность для глаз и лучшую устойчивость к световым помехам.
[000139] Как будет описано ниже более подробно, согласно неограничивающим вариантам осуществления настоящей технологии, на основе выходного луча 317 CW, лидарная система 302 может быть дополнительно выполнена с возможностью формирования сканирующего луча 320 FMCW, который при выходе из лидарной системы 302 направлен далее в сторону окружения 250.
Компонент FM
[000140] Согласно неограничивающим вариантам осуществления настоящей технологии компонент 308 FM связан с возможностью осуществления связи с компонентом 316 контроллера и, таким образом, выполнен с возможностью модуляции частоты 404 CW электрического сигнала 400 CW, связанного с выходным лучом 317 CW, излучаемым компонентом 306 источника света. Таким образом, компонент 308 FM конфигурируется компонентом 316 контроллера для формирования выходного луча 318 FMCW.
[000141] В контексте настоящего описания «частотная модуляция» в широком смысле упоминается как кодирование информации (например, данные объекта 325) в несущем сигнале (то есть в выходном луче 317 CW) путем принудительного изменения его мгновенной частоты (то есть частоты 404 CW) в соответствии с заданной функцией, в то время как амплитуда 406 CW и фаза колебаний (не показаны) остаются постоянными. Заранее определенная функция для изменения частоты 404 CW соответственно упоминается в данном документе как «функция частотной модуляции».
[000142] В некоторых неограничивающих вариантах осуществления настоящей технологии функция частотной модуляции может содержать функцию периодической частотной модуляции, такую как низкочастотная синусоидальная функция, прямоугольная функция и т.п. В других неограничивающих вариантах осуществления настоящей технологии функция частотной модуляции может быть функцией модуляции ЛЧМ, такой как пилообразная функция.
[000143] Со ссылкой на фиг. 5 изображен пример пилообразной функции 500, используемой компонентом 308 FM для модуляции частоты 404 CW, тем самым генерируя выходной луч 318 FMCW, в соответствии с некоторыми неограничивающими вариантами осуществления настоящего технология.
[000144] Как можно понять из фиг. 5, пилообразная функция 500 может быть охарактеризована следующими параметрами: период 502 пилообразной частотной модуляции, T1, частота 504 пилообразной модуляции, f1, и амплитуда 506 пилообразной модуляции, A1. Таким образом, используя пилообразную функцию 500, компонент 308 FM выполнен с возможностью линейного непрерывного увеличения частоты 404 CW электрического сигнала 400 CW от ее начального значения в течение периода 502 пилообразной частотной модуляции, пока не достигнет значения амплитуды 506 пилообразной модуляции. Как только частота 404 CW достигает амплитуды 506 пилообразной модуляции, компонент 308 FM дополнительно выполнен с возможностью сбрасывать частоту 404 CW до ее начального значения и снова увеличивать ее на частоте 504 пилообразной модуляции. Таким образом, компонент 308 FM выполнен с возможностью многократного увеличения частоты 404 CW на частоте 504 пилообразной модуляции, тем самым генерируя выходной луч 318 FMCW.
[000145] Таким образом, в этих вариантах осуществления выходной луч 318 FMCW может быть представлен представлением 508 пилообразного ЛЧМ-сигнала. Как можно понять, амплитуда (отдельно не изображена) и фаза колебаний (отдельно не изображена) представления 508 пилообразного ЛЧМ-сигнала по сравнению с таковыми для электрического сигнала 400 CW остались неизменными, в то время как его частота изменяется в соответствии с пилообразной функцией 500, то есть непрерывно линейно увеличивается в течение фиксированного периода времени, указанного периодом 502 пилообразной частотной модуляции. Таким образом, можно сказать, что пилообразная функция 500 определяет пилообразную форму волны линейного изменения частоты, связанную с выходным лучом 318 FMCW.
[000146] В других неограничивающих вариантах осуществления настоящей технологии функция частотной модуляции может быть треугольной функцией. Со ссылкой на фиг. 6 изображена треугольная функция 600, используемая компонентом 308 FM для модуляции частоты 404 CW в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии.
[000147] Как можно понять из фиг. 6, треугольная функция 600 может характеризоваться следующими параметрами: период 602 треугольной частотной модуляции, T2, частота 604 треугольной модуляции, f2 и амплитуда 606 треугольной модуляции, A2. Таким образом, используя треугольную функцию 600, компонент 308 FM выполнен с возможностью (1) линейного увеличения частоты 404 CW электрического сигнала 400 CW от своего начального значения в течение первой половины (T2/2) периода 602 треугольной частотной модуляции до значения амплитуды 606 треугольной модуляции; и (2) линейно уменьшать частоту 404 CW, сбрасывая ее до исходного значения, в течение второй половины периода 602 треугольной частотной модуляции. Таким образом, компонент 308 FM выполнен с возможностью многократно увеличивать и уменьшать частоту CW линейно на частоте 604 треугольной модуляции, тем самым генерируя выходной луч 318 FMCW.
[000148] Таким образом, в этих вариантах осуществления выходной луч 318 FM может быть представлен треугольным представлением 608 ЛЧМ. Как можно понять, амплитуда (не изображена отдельно) и фаза колебаний (отдельно не изображена) треугольного представления 608 ЛЧМ-сигнала остаются постоянными (то есть неизменными по сравнению с таковыми для электрического сигнала 400 CW), в то время как его частота (не изображена отдельно) изменяется в соответствии с треугольной функцией 600, то есть непрерывно линейно увеличивается в течение фиксированного периода времени, соответствующего первой половине периода 602 треугольной частотной модуляции, и линейно уменьшается в течение другого фиксированного периода времени, соответствующего второй половине периода 602 треугольной частотной модуляции. Таким образом, можно сказать, что треугольная функция 600 определяет треугольную форму волны линейного изменения частоты для выходного луча 318 FMCW.
[000149] Соответственно, только ради простоты и ясности объяснения, описание, представленное ниже, основано на предположении, что амплитуда, связанная с выходным лучом 318 FMCW, является амплитудой 406 CW электрического сигнала 400 CW, формируемого на основе выходного луча 317 CW.
[000150] Согласно неограничивающим вариантам осуществления настоящей технологии, компонент 308 FM может быть реализован, например, но без ограничения, как одно из устройства электрооптической модуляции, устройства акустооптической модуляции, связанного с оптоволокном устройства акустооптической модуляции и т.п.
[000151] В конкретном неограничивающем примере компонент 308 FM может быть реализован как устройство модуляции на основе схемы, которое может быть типа, доступного от Gooch & Housego PLC, Dowlish Ford, Ilminster, TA19 0PF, Великобритания. Следует четко понимать, что компонент 308 FM может быть реализован в любом другом подходящем оборудовании.
[000152] Следует отметить, что в некоторых неограничивающих вариантах осуществления настоящей технологии выходной луч 318 FMCW, формируемый компонентом 304 источника света FMCW, может быть коллимированным оптическим лучом с любой подходящей расходимостью луча для данного приложения. Вообще говоря, расходимость выходного луча 318 FMCW является угловой мерой увеличения размера луча (например, радиуса луча или диаметра луча), когда выходной луч 318 FMCW распространяется от компонента 304 источника света FMCW или лидарной системы 302. В некоторых вариантах осуществления выходной луч 318 FMCW может иметь, по существу, круглое поперечное сечение.
[000153] Также предполагается, что выходной луч 318 FMCW, излучаемый компонентом 304 источника света FMCW, может быть неполяризованным или произвольно поляризованным, может не иметь определенной или фиксированной поляризации (например, поляризация может меняться со временем) или может иметь конкретную поляризацию (например, выходной луч 318 FMCW может иметь линейную поляризацию, эллиптическую поляризацию или круговую поляризацию).
Компонент светоделителя
[000154] Возвращаясь к Фиг. 3, дополнительно предоставляется компонент 310 светоделителя, соединенный с компонентом 304 источника света FMCW. Вообще говоря, в соответствии с неограничивающими вариантами осуществления настоящей технологии, компонент 310 светоделителя представляет собой оптическое устройство, которое выполнено с возможностью деления светового луча (например, выходного луча 318 FMCW) по меньшей мере на два компонента меньшей интенсивности (например, на сканирующий луч 320 FMCW и опорный луч 322 FMCW). Как упоминалось ранее, сканирующий луч 320 FMCW дополнительно излучается в направлении окружения 250 транспортного средства 220 и используется для захвата данных объекта 325, в то время как опорный луч 322 FMCW направляется на компонент 312 приемника.
[000155] Другими словами, можно сказать, что компонент 310 светоделителя выполнен с возможностью деления интенсивности (оптической мощности) выходного луча 318 FMCW между сканирующим лучом 320 FMCW и опорным лучом 322 FMCW. В некоторых неограничивающих вариантах осуществления настоящей технологии компонент 310 светоделителя может быть выполнен с возможностью делить интенсивность выходного луча 318 FMCW между сканирующим лучом 320 FMCW и опорным лучом 322 FMCW поровну. Однако в других неограничивающих вариантах осуществления настоящей технологии компонент 310 светоделителя может быть выполнен с возможностью деления интенсивности выходного луча 318 FMCW с любым коэффициентом разделения. Например, компонент 310 светоделителя может быть выполнен с возможностью использовать до 80% интенсивности выходного луча 318 FMCW для формирования сканирующего луча 320 FMCW, а оставшуюся часть до 20% интенсивности выходного луча 318 FMCW - для формирования опорного луча 322 FMCW. В других неограниченных вариантах осуществления настоящей технологии компонент 310 светоделителя может быть выполнен с возможностью изменения коэффициента разделения для формирования сканирующего луча 320 FMCW (например, от 1% до 95% интенсивности выходного луча 318 FMCW).
[000156] Таким образом, подобно выходному лучу 318 FMCW, сканирующий луч 320 FMCW и опорный луч 322 FMCW также содержат лучи FMCW соответствующих частей интенсивности выходного луча 318 FMCW. Соответственно, поскольку интенсивность светового луча и амплитуда его электрического представления функционально связаны (например, на основе квадратичной функции), амплитуда сканирования FMCW, связанная со сканирующим лучом 320 FMCW, и опорная амплитуда FMCW, связанная с опорным лучом 322 FMCW могут быть определены на основе амплитуды 406 CW, связанной с выходным лучом 318 FMCW, и коэффициента разделения компонента 310 светоделителя.
[000157] Следует также отметить, что некоторая часть (например, до 10%) интенсивности выходного луча 318 FMCW может быть поглощена материалом компонента 310 светоделителя, что зависит от его конкретной конфигурации.
[000158] Следует четко понимать, что способы реализации компонента 310 светоделителя не ограничены и могут включать, согласно неограничивающим вариантам осуществления настоящей технологии, компонент светоделителя на основе стеклянной призмы, компонент светоделителя на основе полусеребряного зеркала, компонент светоделителя на основе дихроичной зеркальной призмы, компонент светоделителя на основе волоконной оптики и т.п.
[000159] Таким образом, согласно неограничивающим вариантам осуществления настоящей технологии, неполный список регулируемых параметров, связанных с компонентом 310 светоделителя, на основе его конкретного применения, может включать, например, рабочий диапазон длин волн, который может варьироваться от конечного числа длин волн до более широкого светового спектра (например, от 1200 до 1600 нм); угол падения; поляризующий/неполяризующий и тому подобное.
[000160] В конкретном неограничивающем примере компонент 310 светоделителя может быть реализован как оптоволоконный компонент светоделителя, который может быть типа, доступного от OZ Optics Ltd., 219 Westbrook Rd Ottawa, Ontario K0A 1L0, Канада. Следует четко понимать, что компонент 310 светоделителя может быть реализован в любом другом подходящем оборудовании.
[000161] В еще других конкретных неограничивающих вариантах осуществления настоящей технологии компонент 310 светоделителя может быть частью компонента 304 источника света FMCW.
Внутренние тракты луча
[000162] Как схематично изображено на фиг. 3, лидарная система 302 может использовать заданный внутренний тракт луча из множества внутренних трактов 326 луча для излучения сканирующего луча 320 FMCW (сформированного компонентом 310 светоделителя) в направлении окружения 250. В одном примере заданный внутренний тракт луча среди множества внутренних трактов 326 луча может позволить подавать свет от компонента 306 источника света к компоненту 308 FM, далее к компоненту 310 светоделителя и, наконец, к компоненту 314 сканера, и, в свою очередь, компонент 314 сканера может позволить сканирующему лучу 320 FMCW быть направленным далее в сторону окружения 250. Кроме того, лидарная система 302 может использовать другой из множества внутренних трактов луча для подачи света от компонента 310 светоделителя к компоненту 312 приемника.
[000163] Кроме того, лидарная система 302 может использовать другой заданный внутренний тракт луча из множества внутренних трактов 326 луча для подачи входного луча 324 FMCW в компонент 312 приемника. В одном примере другой заданный внутренний тракт луча среди множества внутренних трактов 326 луча может позволить подавать входной луч 324 FMCW от компонента 314 сканера к компоненту 312 приемника. В другом примере другой заданный внутренний тракт луча среди множества внутренних трактов 326 луча может позволить подавать входной луч 324 FMCW непосредственно из окружения 250 в компонент 312 приемника (без прохождения входного луча 324 FMCW через компонент 314 сканера).
[000164] Следует отметить, что множество внутренних трактов 326 луча может содержать множество оптических компонентов. Например, лидарная система 302 может включать в себя один или несколько оптических компонентов, выполненных с возможностью настройки, формирования, фильтрации, модификации, управления или направления сканирующего луча 320 FMCW и/или входного луча 324 FMCW. Например, лидарная система 302 может включать в себя одну или несколько линз, зеркал, фильтров (например, полосовых или интерференционных фильтров), оптических волокон, циркуляторов, светоделителей, поляризаторов, поляризационных светоделителей, волновых пластин (например, полуволновых или четвертьволновых пластин), дифракционных элементов, микроэлектромеханических (МЕМ) элементов, коллимирующих элементов или голографических элементов.
[000165] Предполагается, что по меньшей мере в некоторых неограничивающих вариантах осуществления настоящей технологии данный внутренний тракт луча и другой внутренний тракт луча из множества внутренних трактов 326 луча могут совместно использовать по меньшей мере некоторые общие оптические компоненты, однако это может не иметь место в каждом варианте осуществления настоящей технологии.
Компонент сканера
[000166] Вообще говоря, компонент 314 сканера направляет сканирующий луч 320 FMCW в одном или нескольких направлениях далее в сторону окружения 250. Компонент 314 сканера может содержать множество оптических компонентов и/или компонентов механического типа для выполнения сканирования сканирующего луча 320 FMCW. Например, компонент 314 сканера может включать в себя одно или несколько зеркал, призм, линз, компонентов MEM, пьезоэлектрических компонентов, оптических волокон, разделителей, дифракционных элементов, коллимирующих элементов и т.п. Следует отметить, что компонент 314 сканера может также включать в себя один или несколько приводов (отдельно не показаны), приводящих по меньшей мере некоторые оптические компоненты для вращения, наклона, поворота или перемещения под углом, например, по одной или нескольким осям.
[000167] Кроме того, компонент 314 сканера может быть выполнен с возможностью сканирования сканирующего луча 320 FMCW по множеству горизонтальных угловых диапазонов и/или вертикальных угловых диапазонов. Другими словами, компонент 314 сканера может играть важную роль в обеспечении лидарной системы 302 желаемой интересующей областью (ROI, отдельно не изображена). Интересующая область (отдельно не изображена) лидарной системы 302 может относиться к площади, объему, области, угловому диапазону и/или части(-ям) окружения 250, вокруг которого лидарная система 302 может быть выполнена с возможностью сканирования и/или может собирать данные.
[000168] Компонент 314 сканера может быть связан с возможностью осуществления связи с компонентом 316 контроллера. По существу, компонент 316 контроллера может быть выполнен с возможностью управления компонентом 314 сканера, чтобы направлять сканирующий луч 320 FMCW в желаемом направлении далее и/или вдоль желаемого шаблона сканирования. Вообще говоря, шаблон сканирования может относиться к шаблону или пути, по которому сканирующий луч 320 FMCW направляется компонентом 314 сканера во время работы.
[000169] В процессе работы, в некоторых вариантах осуществления, получив выходной луч 318 FMCW, компонент 310 светоделителя дополнительно формирует сканирующий луч 320 FMCW, который компонент 314 сканера сканирует через интересующую область (отдельно не изображена) лидарной системы 302 в соответствии с шаблоном сканирования. Кроме того, объект 325 может отражать по меньшей мере часть сканирующего луча 320 FMCW, тем самым генерируя входной луч 324 FMCW, который аналогичен сканирующему лучу 320 FMCW. Компонент 312 приемника принимает или обнаруживает фотоны от входного луча 324 FMCW и формирует один или несколько репрезентативных сигналов данных (например, электрических сигналов). Компонент 312 приемника также может подавать сформированный таким образом электрический сигнал на компонент 316 контроллера для дальнейшей обработки, которая будет описана ниже со ссылкой на фиг. 7.
Компонент приемника
[000170] Согласно неограничивающим вариантам осуществления настоящей технологии компонент 312 приемника (также называемый здесь «детектором») связан с возможностью осуществления связи с компонентом 316 контроллера и может быть реализован множеством способов. Вообще говоря, компонент 312 приемника представляет собой оптоэлектронное устройство, конфигурируемое компонентом 316 контроллера для преобразования оптического сигнала (такого как входной луч 324 FMCW) в соответствующий электрический сигнал (ток и/или напряжение). С этой целью компонент 312 приемника может содержать, например, фотоприемник, оптический приемник, оптический датчик, детектор, фотодетектор, оптический детектор, оптические волокна и т.п.
[000171] Согласно неограничивающим вариантам осуществления настоящей технологии компонент 312 приемника может быть выполнен с возможностью приема по меньшей мере части сканирующего луча 320 FMCW, отраженного от объекта 325, который может быть представлен входным лучом 324 FMCW. Следует отметить, что в некоторых случаях входной луч 324 FMCW может содержать только относительно небольшую часть света от сканирующего луча 320 FMCW из-за его ослабления, вызванного отражением от объекта 325. Следует также отметить, что угол входного луча 324 FMCW относительно поверхности объекта 325 («угол падения») может быть таким же или отличаться от угла сканирующего луча 320 FMCW относительно поверхности объекта 325 («угол отражения»).
[000172] В этом отношении, согласно неограничивающим вариантам осуществления настоящей технологии, компонент 312 приемника может быть выполнен с возможностью преобразования входного луча 324 FMCW во входной электрический сигнал FMCW. Кроме того, компонент 312 приемника может быть выполнен с возможностью отправки сформированного таким образом входного электрического сигнала FMCW в компонент 316 контроллера для дальнейшего анализа.
[000173] Согласно некоторым неограничивающим вариантам осуществления настоящей технологии компонент 312 приемника может дополнительно содержать по меньшей мере два входа, чтобы быть выполненным с возможностью приема по меньшей мере другого оптического сигнала, помимо входного луча 324 FMCW - например, опорного луча 322 FMCW. Кроме того, компонент 312 приемника может быть выполнен с возможностью преобразования опорного луча 322 FMCW в опорный электрический сигнал FMCW и далее послать его к компоненту 316 контроллера для дальнейшего анализа.
[000174] Таким образом, согласно некоторым неограниченным вариантам осуществления настоящей технологии, компонент 312 приемника может быть выполнен с возможностью (1) приема входного луча 324 FMCW и опорного луча 322 FMCW; (2) преобразования входного луча 324 FMCW и опорного луча 322 FMCW во входной электрический сигнал FMCW и опорный электрический сигнал FMCW, соответственно; и (3) передачи входного электрического сигнала FMCW и опорного электрического сигнала FMCW в компонент 316 контроллера для анализа его определенных характеристик, тем самым определяя данные объекта 325, как будет описано ниже со ссылкой на фиг. 7.
[000175] В некоторых неограничивающих вариантах осуществления настоящей технологии, перед передачей входного электрического сигнала FMCW и опорного электрического сигнала FMCW к компоненту 316 контроллера, компонент 312 приемника может быть дополнительно выполнен с возможностью формировать их смесь, и далее передать его компонент 316 контроллера для его использования для определения данных объекта 325, как будет описано ниже со ссылкой на фиг. 8-23.
[000176] В некоторых неограничивающих вариантах осуществления настоящей технологии компонент 312 приемника является компонентом когерентного приемника. Другими словами, компонент 312 приемника может быть сконфигурирован с помощью компонента 316 контроллера для приема входного луча 324 FMCW, только если он когерентен с опорным лучом 322 FMCW, то есть по меньшей мере одни из разностей фаз, частот и форм сигналов, соответственно связанных с ними, по существу идентичны и постоянны во времени.
[000177] Предполагается, что компонент 312 приемника может быть реализован с одним или несколькими лавинными фотодиодами (APD), одним или несколькими однофотонными лавинными диодами (SPAD), одним или несколькими PN-фотодиодами (например, структурой фотодиода, образованной полупроводником p-типа и полупроводником n-типа), одним или несколькими PIN-фотодиодами (например, структурой фотодиода, образованной нелегированной собственной полупроводниковой областью, расположенной между областями p-типа и n-типа) и т.п.
[000178] В некоторых неограничивающих вариантах осуществления компонент 312 приемника может также содержать схему, которая выполняет усиление сигнала, дискретизацию, фильтрацию, преобразование сигнала, аналого-цифровое преобразование, аналого-цифровое преобразование времени, обнаружение импульсов, обнаружение порога, обнаружение нарастающего фронта, обнаружение спадающего фронта и тому подобное. Например, компонент 312 приемника может включать в себя электронные компоненты, выполненные с возможностью преобразования принятого фототока (например, тока, создаваемого APD в ответ на принятый оптический сигнал) в сигнал напряжения.
[000179] В некоторых неограничивающих вариантах осуществления настоящей технологии компонент 312 приемника и компонент 316 контроллера могут быть реализованы как единый компонент лидарной системы 302, заключенный в отдельный корпус (отдельно не изображен), тем самым обеспечивая прием входящих световых лучей, формирующих соответствующий электрический сигнал и определяющих на основе анализа соответствующих электрических сигналов данные объекта 325.
Компонент контроллера
[000180] В неограничивающих вариантах осуществления настоящей технологии компонент 316 контроллера может включать в себя один или несколько процессоров, специализированную интегральную схему (ASIC), программируемую пользователем вентильную матрицу (FPGA) и/или другие подходящие схемы. Компонент 316 контроллера также может включать в себя энергонезависимую компьютерно-читаемую память для хранения инструкций, выполняемых компонентом 316 контроллера, а также данных, которые компонент 316 контроллера может создавать на основе сигналов, полученных от других внутренних компонентов лидарной системы 302 и/или может передавать сигналы другим внутренним компонентам лидарной системы 302. Память может включать в себя энергозависимые (например, RAM) и/или энергонезависимые (например, флэш-память, жесткий диск) компоненты. Компонент 316 контроллера может быть выполнен с возможностью формирования данных во время работы и сохранения их в памяти. Например, эти данные, формируемые компонентом 316 контроллера, могут указывать на точки данных в облаке точек лидарной системы 302.
[000181] Предполагается, что по меньшей мере в некоторых неограничивающих вариантах осуществления настоящей технологии компонент 316 контроллера может быть реализован аналогично электронному устройству 210 и/или компьютерной системе 100, не выходя за рамки объема настоящей технологии.
[000182] В дополнение к сбору данных от компонента 312 приемника, компонент 316 контроллера также может быть выполнен с возможностью предоставления сигналов управления и потенциально приема диагностических данных от компонента 306 источника света, компонента 308 FM и компонента 314 сканера.
[000183] Как указано ранее, компонент 316 контроллера связан с возможностью осуществления связи с одним или несколькими из компонента 306 источника света, компонента 308 FM, компонента 314 сканера и компонента 312 приемника. Согласно неограничивающим вариантам осуществления настоящей технологии компонент 316 контроллера может дополнительно предоставлять инструкции, управляющий сигнал и/или сигнал запуска компоненту 304 источника света FMCW, заставляя компонент 304 источника света FMCW производить излучение света.
[000184] Так же, как пример, компонент 316 контроллера может быть выполнен с возможностью отправки электрического сигнала, так что компонент 304 источника света FMCW начинает излучать выходной луч 318 FMCW. Также предполагается, что компонент 316 контроллера может предписывать компоненту 304 источника света FMCW регулировать одну или несколько характеристик светового излучения, создаваемого компонентом 304 источника света FMCW, таких как, но не ограничиваясь ими: частота, период, продолжительность, выходная мощность и длина волны выходного луча 318 FMCW (и/или выходного луча 317 CW). Кроме того, компонент 316 контроллера может быть выполнен с возможностью предписывать компоненту 304 источника света FMCW применять конкретную функцию частотной модуляции (такую как пилообразная функция 500 и треугольная функция 600).
[000185] Как упоминалось ранее, компонент 316 контроллера может быть дополнительно выполнен с возможностью определения данных объекта 325, захваченных компонентом 304 источника света FMCW в окружении 250 транспортного средства 220.
[000186] В некоторых неограничивающих вариантах осуществления настоящей технологии объект 325 может содержать статический объект, такой как светофор, пилон, остановившееся транспортное средство и т.п. В других неограничивающих вариантах осуществления настоящей технологии объект 325 может содержать динамический объект, такой как движущееся транспортное средство, велосипедист, пешеход, животное и т.п.
[000187] Таким образом, согласно неограничивающим вариантам осуществления настоящей технологии, данные объекта 325 могут включать в себя по меньшей мере расстояние 390 до него от лидарной системы 302 и его мгновенную скорость 327 относительно лидарной системы 302 в качестве примера.
[000188] В соответствии с неограничивающими вариантами осуществления настоящей технологии, компонент 316 контроллера выполнен с возможностью определения данных объекта 325 на основе анализа входного электрического сигнала FMCW и опорного электрического сигнала FMCW, сформированных компонентом 312 приемника в ответ на прием входного луча 324 FMCW и опорного луча 322 FMCW соответственно.
[000189] Со ссылкой на фиг.7, на которой изображена принципиальная схема наложения 700 первой треугольной формы волны 701 линейного изменения частоты, соответствующей опорному лучу 322 FMCW, и второй треугольной формы волны 702 линейного изменения частоты, соответствующей входному лучу 324 FMCW, полученных компонентом 316 контроллера из компонента 312 приемника в соответствии с неограничивающими вариантами осуществления настоящей технологии. Как можно понять, первая треугольная форма волны 701 линейного изменения частоты и вторая треугольная форма волны 702 линейного изменения частоты могут быть сформированы компонентом 304 источника света FMCW с применением треугольной функции 600, как описано выше со ссылкой на фиг.6.
[000190] Как можно понять из фиг. 7, когда сканирующий луч 320 FMCW (зеркальный в опорном луче 322 FMCW) отражается от объекта 325, запускается формирование входного луча 324 FMCW, причем отражение вызывает временной сдвиг 704, ∆T, и частотный сдвиг 706, ΔfD, (также называемый здесь доплеровской частотой) между ними. Согласно неограничивающим вариантам осуществления настоящей технологии компонент 316 контроллера может быть выполнен с возможностью определения данных объекта 325 на основе временного сдвига 704 и частотного сдвига 706. Таким образом, можно сказать, что компонент 316 контроллера декодирует данные объекта 325 из входного луча 324 FMCW, закодированные с помощью частотной модуляции.
[000191] Например, поскольку можно показать, что временной сдвиг 704 указывает «время прохождения туда и обратно» для излучаемого светового луча, чтобы пройти от лидарной системы 302 к объекту 325 и обратно к лидарной системе, компонент 316 контроллера может быть выполнен с возможностью вычисления расстояния 390 в соответствии со следующим уравнением:
 (2)
(2)
где D - расстояние 390 до объекта 325;
c - скорость света (примерно 3,0 × 108 м/с); а также
ΔT - это временной сдвиг 704.
[000192] Кроме того, на основе частотного сдвига 706 компонент 316 контроллера может быть выполнен с возможностью вычисления мгновенной скорости объекта 325 относительно лидарной системы 302 в соответствии со следующим уравнением:
 (3)
(3)
где v - мгновенная скорость 327 объекта 325 относительно лидарной системы 302;
λ - рабочая длина волны компонента 306 источника света (длина волны 408 CW); а также
ΔfD представляет собой частотный сдвиг 706 между первой треугольной формой волны 701 линейного изменения частоты и второй треугольной формой волны 702 линейного изменения частоты.
[000193] Таким образом, в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии, лидарная система 302 может использоваться для определения расстояний до одного или нескольких других потенциальных объектов, расположенных в окружении 250 транспортного средства 220, представляющих определенные таким образом расстояния (аналогично расстоянию 390) в виде облака точек, которое дополнительно может использоваться для формирования многомерной карты окружения 250. Кроме того, лидарная система 302 может быть выполнена с возможностью «онлайн» регистрации скорости и расстояния (аналогично определению мгновенной скорости 327) объектов, расположенных в окружении 250, что дополнительно может позволить планировать траекторию для транспортного средства 220 относительно безопасности дороги (например, предотвращение столкновений с другими транспортными средствами) и комфорта пассажиров.
[000194] Согласно неограничивающим вариантам осуществления настоящей технологии лидарная система 302 на основе ее конкретных параметров, таких как компонент 304 источника света FMCW и компонент 312 приемника, может быть связана со значением порогового расстояния определения дальности, указывающим на наибольшее расстояние, в пределах которого лидарная система 302 может быть выполнена с возможностью обнаружения объекта (такого как объект 325). Другими словами, значение порогового расстояния определения дальности, связанное с лидарной системой 302, может указывать на расстояние, с которого лидарная система 302 может быть выполнена с возможностью приема входного луча 324 FMCW, позволяющего получать надежные данные об объекте 325.
[000195] Однако, как отмечалось выше, входной луч 324 FMCW может быть ослаблен при передаче данных об объекте 325 путем отражения от него, то есть интенсивность входного луча 324 FMCW может быть значительно уменьшена (в некотором смысле «затухает»), что может привести к тому, что компонент 312 приемника не сможет принимать входной луч 324 FMCW и/или формировать электрический сигнал, позволяющий получить надежные данные об объекте 325.
[000196] В контексте настоящего описания термин «ослабление» в широком смысле упоминается как уменьшение интенсивности светового луча (например, входного луча 324 FMCW), когда он проходит через среду из-за поглощения или рассеяния его фотонов. Таким образом, определенные факторы, вызывающие затухание, могут включать, помимо прочего: (1) фоновый оптический шум, вызванный, например, другими лидарными системами, работающими в окружении 250, или солнечным излучением (или любыми другими электромагнитными помехами); (2) различные физические препятствия (такие как другие объекты в окружении 250) на пути между объектом 325 и лидарной системой 302, которые могут препятствовать свободному распространению входного луча 324 FMCW или поглощать по меньшей мере его часть; и (3) различные среды, которые потенциально могут присутствовать в воздухе, такие как газы, влага (например, из-за тумана) и т.п., где степень ослабления зависит от расстояния 390 до объекта 325. Кроме того, более высокие значения расстояния 390 могут дополнительно увеличить вероятность того, что входной луч 324 FMCW будет затронут вышеупомянутыми факторами, что позволяет рассматривать расстояние 390 как таковое как независимый коэффициент затухания.
[000197] Таким образом, некоторые неограничивающие варианты осуществления настоящей технологии направлены на системы и способы усиления данного входного светового луча (то есть принудительного увеличения его интенсивности) до того, как данный входной световой луч (или соответствующий электрический сигнал, указывающий на него) будет анализироваться компонентом 316 контроллера для определения данных объекта 325.
[000198] Как станет очевидно из описания, представленного ниже, в некоторых неограничивающих вариантах осуществления настоящей технологии данный входной световой луч может быть входным световым лучом FMCW (например, входным световым лучом 324 FMCW), тогда как в других неограничивающих вариантах осуществления настоящей технологии, данный входной световой луч может быть амплитудно-модулированным входным световым лучом FMCW.
[000199] Следовательно, в некоторых неограничивающих вариантах осуществления настоящей технологии усиление входного луча 324 FMCW может включать в себя модуляцию лидарной системой 302 одной из амплитуды 406 CW, связанной с выходным лучом 318 FMCW, выходной амплитуды, связанной со сканирующим лучом 320 FMCW, и опорной амплитуды, связанной с опорным лучом 322 FMCW, на основе функции амплитудной модуляции.
[000200] В контексте настоящего описания термин «амплитудная модуляция» в широком смысле упоминается как принудительное изменение интенсивности данного светового луча (представленной соответствующей амплитудой, такой как амплитуда 406 CW, связанная с выходным лучом 318 FMCW, например) согласно функции амплитудной модуляции.
[000201] Таким образом, в соответствии с неограничивающими вариантами осуществления настоящей технологии, для того, чтобы применить функцию амплитудной модуляции к одному из выходного луча 318 FMCW, сканирующего луча 320 FMCW и опорного луча 322 FMCW, лидарные системы 302 могут дополнительно включать в себя компонент амплитудного модулятора (AM).
Компонент AM
[000202] Со ссылкой на фиг. 8 изображена принципиальная схема первой реализации лидарной системы 302 в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии. В частности, в первой реализации лидарная система 302, помимо ее компонентов, описанных выше со ссылкой на фиг. 3, включает в себя компонент 802 AM, связанный с компонентом 304 источника света FMCW.
[000203] Вообще говоря, компонент 802 AM связан с компонентом 316 контроллера и, таким образом, выполнен с возможностью приема светового луча FMCW и применения к нему функции амплитудной модуляции, модулирующей соответствующую его амплитуду, тем самым генерируя световой луч непрерывной волны с амплитудно-частотной модуляцией (AFMCW). Таким образом, согласно неограничивающим вариантам осуществления настоящей технологии компонент 802 AM может быть выполнен с возможностью приема выходного луча 318 FMCW, формируемого компонентом 304 источника света FMCW, применения к нему функции амплитудной модуляции для модуляции амплитуды 406 CW, тем самым генерируя выходной луч 818 AFMCW. Лидарная система 302, включающая в себя компонент 802 AM, может, следовательно, упоминаться как лидарная система «AFMCW». Соответственно, некоторые параметры выходного луча 818 AFMCW зависят от функции амплитудной модуляции.
[000204] Согласно неограничивающим вариантам осуществления настоящей технологии функция амплитудной модуляции может содержать периодическую функцию (такую как пилообразная функция, треугольная функция, функция на основе синусоиды и т.п.), так что амплитуда 406 CW непрерывно изменяется (увеличивается, например) за период амплитудной модуляции функции амплитудной модуляции. На основе конкретной конфигурации функции амплитудной модуляции можно рассмотреть по меньшей мере два сценария работы компонента 802 AM в лидарной системе.
[000205] В некоторых неограничивающих вариантах осуществления настоящей технологии функция амплитудной модуляции может содержать линейно-периодическую функцию (Сценарий 1). Со ссылкой на фиг. 9 изображен график линейной периодической функции 900, используемой компонентом 802 AM для формирования выходного луча 818 AFMCW на основе выходного луча 318 FMCW, в соответствии с неограничивающими вариантами осуществления настоящей технологии. Как можно понять из фиг. 9, линейная периодическая функция 900 может быть охарактеризована следующими параметрами: период 902 амплитудной модуляции, TA, первое значение 904 амплитуды, A1A, второе значение 906 амплитуды, A2A. Кроме того, можно сказать, что первое значение 904 амплитуды и второе значение 906 амплитуды определяют диапазон амплитудной модуляции, связанный с компонентом 802 AM. Таким образом, используя линейную периодическую функцию 900, компонент 802 AM лидарной системы 302 может быть выполнен с возможностью непрерывного линейного увеличения амплитуды 406 CW, связанной с выходным лучом 318 FMCW, от первого значения 904 амплитуды до второго значения 906 амплитуды в течение периода 902 амплитудной модуляции, тем самым генерируя выходной луч 818 AFMCW. Как только амплитуда 406 CW достигает второго значения 906 амплитуды, компонент 802 AM выполнен с возможностью сброса его снова на первое значение 904 амплитуды, тем самым генерируя форму волны линейного нарастания амплитуды для выходного луча 818 AFMCW.
[000206] В других неограничивающих вариантах осуществления настоящей технологии функция амплитудной модуляции может быть любой другой периодической функцией, например, асимптотической периодической функцией (Сценарий 2). Со ссылкой на фиг. 10 изображен график асимптотической периодической функции 1000, используемой компонентом 802 AM для модуляции амплитуды 406 CW, связанной с выходным лучом 318 FMCW, тем самым генерируя выходной луч 818 AFMCW, в соответствии с некоторыми неограничивающими вариантами настоящей технологии.
[000207] Таким образом, в этих вариантах осуществления, используя асимптотическую периодическую функцию 1000, компонент 802 AM выполнен с возможностью непрерывно увеличивать амплитуду 406 CW от первого значения 904 амплитуды вдоль кривой, представляющей асимптотическую периодическую функцию 1000, в течение периода 902 амплитудной модуляции, приближающуюся к второму значению амплитуды 906, работая в пределах своего диапазона амплитудной модуляции. Кроме того, как можно понять, используя асимптотическую периодическую функцию 1000, компонент 802 AM не может быть выполнен с возможностью увеличения амплитуды 406 CW до второго значения 906 амплитуды, поскольку в этих вариантах осуществления амплитуда 406 CW может только бесконечно приближаться ко второму значению 906 амплитуды вдоль асимптоты 1002, указанной таким образом, в течение периода 902 амплитудной модуляции. Соответственно, с периодом 902 амплитудной модуляции компонент 802 AM выполнен с возможностью многократной модуляции амплитуды 406 CW с использованием асимптотической периодической функции 1000, тем самым генерируя форму волны с асимптотическим нарастанием амплитуды для выходного луча 818 AFMCW.
[000208] В некоторых неограничивающих вариантах осуществления настоящей технологии период 902 амплитудной модуляции может быть равен периоду частотной модуляции (например, периоду 502 пилообразной частотной модуляции или периоду 602 треугольной частотной модуляции), так что выходной луч 317 CW может быть с частотной и амплитудной модуляцией в течение общего периода модуляции. Например, как только выходной луч 317 CW направляется через компонент 308 FM, связанная с ним частота, то есть частота 404 CW, модулируется функцией частотной модуляции в течение периода частотной модуляции, тем самым генерируя выходной луч 318 FMCW. Кроме того, в качестве другого примера, когда выходной луч 318 FMCW направляется через компонент 802 AM, амплитуда 406 CW модулируется функцией амплитудной модуляции в течение периода амплитудной модуляции, тем самым генерируя выходной луч 818 AFMCW.
[000209] В конкретных неограничивающих вариантах осуществления настоящей технологии период 902 амплитудной модуляции может быть задан предварительно на основе значения порогового расстояния определения дальности, связанного с лидарной системой 302. Как отмечалось ранее, чем больше расстояние 390 до объекта 325, тем более ослабленным будет входной луч 324 FMCW. С этой целью разработчики настоящей технологии поняли, что для получения стабильно надежных данных об объекте 325, выходной луч FMCW лидарной системы 302 (такой как выходной луч 318 FMCW и/или сканирующий луч FMCW 320, например) может модулироваться по амплитуде в течение периода 902 амплитудной модуляции, который был определен на основании значения порогового расстояния определения дальности лидарной системы 302. Другими словами, период 902 амплитудной модуляции может быть задан предварительно равным времени прохождения туда и обратно сканирующего луча 320 FMCW для движения к объекту 325, когда он расположен на пороговом расстоянии определения дальности от лидарной системы 302; отражения от объекта 325; и возврата обратно в лидарную систему 302. Кроме того, разработчики поняли, что такой подход к модуляции сканирующего луча 320 FMCW может позволить усилить входной луч лидарной системы 302 (такой как входной луч 824 AFMCW, например) в зависимости от расстояния 390, так что чем дальше объект 325 расположен от лидарной системы 302, тем больше будет амплитуда, связанная с входным лучом 824 AFMCW.
[000210] В некоторых неограничивающих вариантах осуществления настоящей технологии могут использоваться различные способы реализации компонента 802 AM, включая, однако, без ограничения:
регулируемый оптический модулятор MEMS;
электрооптический модулятор;
магнитооптический модулятор;
волоконно-оптический усилитель;
полупроводниковый оптический усилитель; а также
другой источник света (например, другой источник света AFMCW).
[000211] Таким образом, чтобы применить функцию амплитудной модуляции, компонент 802 AM может быть выполнен с возможностью использования множества связанных с его соответствующими реализациями, включая, но не ограничиваясь этим: (1) глубокое ослабление светового луча на основе непрерывной волны с последующим непрерывным уменьшением уровня ослабления в соответствии с функцией амплитудной модуляции; (2) непрерывное увеличение уровня усиления светового луча на основе непрерывной волны; или (3) использование комбинированного подхода, учитывающего, например, уровень ослабления и уровень усиления светового луча на основе непрерывной волны.
[000212] Также предполагается, что в некоторых неограничивающих вариантах осуществления настоящей технологии компонент 802 AM может быть неотъемлемым компонентом компонента 304 источника света FMCW, так что компонент 304 источника света FMCW может быть выполнен с возможностью формирования луча AFMCW (выходной луч 818 AFMCW, например).
[000213] Соответственно, нижеприведенное описание в отношении некоторых реализаций лидарной системы 302, включая компонент 802 AM, будет предоставлено в свете Сценария 1 и Сценария 2. Кроме того, следует отметить, что в зависимости от конкретного размещения компонента 802 AM в лидарной системе могут дополнительно рассматриваться различные его реализации.
Первая реализация лидарной системы
[000214] Возвращаясь к фиг. 8, согласно первой реализации лидарной системы 302, компонент 802 AM выполнен с возможностью направления выходного луча 818 AFMCW на компонент 310 светоделителя, который выполнен с возможностью разделять его на сканирующий луч 820 AFMCW, направленный далее к окружению 250, и опорный луч 822 AFMCW, направленный на компонент 312 приемника. Кроме того, как упоминалось ранее, сканирующий луч 820 AFMCW может рассеиваться от одного или нескольких объектов (таких как объект 325), расположенных в окружении 250, тем самым генерируя входной луч 824 AFMCW, который дополнительно может регистрироваться компонентом приемника 312.
[000215] Следует четко понимать, что для ясности дальнейшего описания предполагается, что компонент 310 светоделителя делит входящий световой луч (такой как выходной луч 818 AFMCW) поровну на соответствующие выходные лучи (такие как сканирующий луч 820 AFMCW и опорный луч 822 AFMCW). Таким образом, можно сказать, что опорный луч 822 AFMCW можно рассматривать как «копию» сканирующего луча 820 AFMCW.
[000216] Как ранее упоминалось, компонент 312 приемника может быть сконфигурирован, компонентом контроллера 316, чтобы получить опорный луч 822 AFMCW и входной луч 824 AFMCW, формировать электрические сигналы, характеризующие их, и дополнительно послать сформированный таким образом электрический сигнал на компонент 316 контроллера для дальнейшего анализа. В результате компонент 316 контроллера может быть выполнен с возможностью определения на основе анализа соответствующих электрических сигналов данных объекта 325, таких как расстояние 390 и мгновенная скорость 327 относительно лидарной системы 302, как описано выше со ссылкой на фиг. 7.
[000217] Однако из-за ослабления входного луча 824 AFMCW компонент 316 контроллера может быть не в состоянии определить надежные данные объекта 325. Таким образом, как уже упоминалось ранее, в соответствии с неограничивающим вариантом осуществления настоящей технологии, компонент 312 приемника может быть выполнен с возможностью использования опорного луча 822 AFMCW для усиления входного луча 824 AFMCW.
[000218] В частности, в некоторых неограничивающих вариантах осуществления настоящей технологии, компонент 312 приемника может быть сконфигурирован, компонентом контроллера 316, (1) получать входной луч 824 AFMCW и опорный луч 822 AFMCW; (2) формировать входной электрический сигнал AFMCW и опорный электрический сигнал AFMCW, соответственно связанные с ними; (3) формировать смесь входного электрического сигнала AFMCW и опорного электрического сигнала AFMCW, тем самым генерируя первый усиленный входной электрический сигнал 826 AFMCW. Кроме того, компонент 316 контроллера может быть выполнен с возможностью приема первого сформированного таким образом усиленного электрического сигнала 826 AFMCW для дальнейшего анализа его в отношении опорного электрического сигнала AFMCW для определения данных объекта 325.
[000219] Для примера, а не в качестве ограничения, компонент 312 приемника может быть выполнен с возможностью формировать входной электрический сигнал AFMCW и опорный электрический сигнал AFMCW, определенный с помощью следующих уравнений:
 , (4)
, (4)
где SI - представление входного электрического сигнала AFMCW;
SR - представление опорного электрического сигнала AFMCW;
AI - амплитуда входного электрического сигнала AFMCW;
AR - амплитуда опорного электрического сигнала AFMCW;
ωI - угловая частота входного электрического сигнала AFMCW;
ωR - угловая частота опорного электрического сигнала AFMCW; и
φ0 - фаза колебаний входного электрического сигнала AFMCW и опорного электрического сигнала AFMCW.
[000220] Следует четко понимать, что члены AI, AR, ωI, ωR и φ0 в уравнениях (4) выражаются как независимые переменные только для ясности описания и могут быть выражены как функции времени (например, соответствующие конфигурации функции амплитудной модуляции и функции частотной модуляции), как описано выше со ссылкой на соответствующие фиг. 5-6 и 9-10.
[000221] Кроме того, компонент 312 приемника, может быть выполнен с возможностью формировать смесь входного электрического сигнала AFMCW и опорного электрического сигнала AFMCW. С этой целью компонент приемника может быть выполнен с возможностью формирования суммирования (например, но также могут использоваться другие операции обработки, такие как умножение) этих сигналов. Так, например, смесь входного электрического сигнала AFMCW и опорного электрического сигнала AFMCW может быть выражена следующим уравнением:
 (5)
(5)
где S представляет собой представление первого усиленного входного электрического сигнала AFMCW 826, и
A представляет собой амплитуду первого усиленного входного электрического сигнала 826 AFMCW, которая может быть определена в соответствии со следующим уравнением:
 . (6)
. (6)
[000222] Таким образом, амплитуда первого усиленного входного электрического сигнала 826 AFMCW может быть определена на основании соответствующих амплитуд входного электрического сигнала AFMCW и опорного электрического сигнала AFMCW, различные подходы к формированию которых, посредством компонента 802 AM, будут описаны ниже со ссылкой на фиг. 11 и 12.
[000223] Кроме того, предполагается, что компонент 312 приемника может иметь порог входной мощности, который указывает максимальные значения интенсивности принимаемых световых лучей (таких как опорный луч 822 AFMCW и входной луч 824 AFMCW), позволяющие надежно преобразовывать их в соответствующие электрические сигналы (такие как опорный электрический сигнал AFMCW и входной электрический сигнал AFMCW) без повреждения компонента 312 приемника.
[000224] Таким образом, согласно неограничивающим вариантам осуществления настоящей технологии некоторые параметры компонента 802 AM могут быть отрегулированы, например, используемая функция амплитудной модуляции (такая как линейная периодическая функция 900 или асимптотическая периодическая функция 1000), определенные параметры используемой функции амплитудной модуляции (например, второе значение 906 амплитуды), используемый метод модуляции и т.п. для получения максимального значения амплитуды усиленного входного электрического сигнала AFMCW (определяемого на основе уравнения (6), например), не превышающего предварительно заданное пороговое значение амплитуды, связанное с пороговым значением входной мощности компонента 312 приемника. Формально это условие можно выразить следующим уравнением:
 , (7)
, (7)
где |Amax| - максимальное значение амплитуды усиленного входного электрического сигнала AFMCW, определяемое на основании Уравнения (6); и
R - предварительно определенное пороговое значение амплитуды, связанное с компонентом 312 приемника.
[000225] Например, в тех неограничивающих вариантах осуществления настоящей технологии, где компонент 312 приемника содержит оптический детектор на основе полупроводника, предварительно определенное пороговое значение амплитуды может указывать на пиковое обратное напряжение, связанное с компонентом 312 приемника.
[000226] В некоторых неограниченных вариантах осуществления настоящей технологии параметры компонента 802 AM для соблюдения условия (7) могут регулироваться оператором.
Сценарий 1
[000227] Со ссылкой на фиг. 11, на которой изображено первое представление 1100 формы волны изменения амплитуды опорного электрического сигнала AFMCW и входного электрического сигнала AFMCW, изображающее линейный опорный амплитудный сигнал 1102 AFMCW и линейный входной амплитудный сигнал 1104 AFMCW, в соответствии с первой реализацией лидарной системы 302. Линейный опорный амплитудный сигнал 1102 AFMCW и линейный входной амплитудный сигнал 1104 AFMCW были сформированы с помощью компонента 312 приемника на основании принятого опорного луча 822 AFMCW и входного луча 824 AFMCW, соответственно.
[000228] Как можно понять из фиг. 11, опорный луч 822 AFMCW был сформирован на основе выходного луча 818 AFMCW, который был амплитудно-модулирован компонентом 802 AM с использованием линейной периодической функции 900, как описано выше со ссылкой на фиг. 9.
[000229] Таким образом, с продолжением ссылки на фиг. 11 и со ссылкой на фиг. 8, сначала, в первый момент времени t1, опорный луч 822 AFMCW принимается компонентом 312 приемника, в то время как сканирующий луч 820 AFMCW направлен далее к окружению 250 транспортного средства 220, что представлено линейным опорным амплитудным сигналом 1102 AFMCW. Следовательно, отражаясь от объекта 325, сканирующий луч 820 AFMCW формирует входной луч 824 AFMCW, который может приниматься компонентом 312 приемника во второй момент времени t2, как представлено линейным входным амплитудным сигналом 1104 AFMCW. Оба из линейного опорного амплитудного сигнала 1102 AFMCW и линейного входного амплитудного сигнала 1104 AFMCW непрерывно растут в пределах периода 902 амплитудной модуляции, в соответствии с линейной периодической функцией 900.
[000230] Как можно далее понять из фиг. 11, отражение сканирующего луча 820 AFMCW от объекта 325 и расстояние 390, пройденное назад к лидарной системе, вызвали ослабление входного луча 824 AFMCW, что привело к постоянной разности 1106 линейной амплитуды.
[000231] Соответственно, как указывалось выше, компонент 312 приемника может быть выполнен с возможностью формировать смесь опорного электрического сигнала AFMCW и входного электрического сигнала AFMCW, таким образом, генерируя первый усиленный входной электрический сигнал 826 AFMCW, амплитуда которого может быть определена, например, в соответствии с уравнением (6) на основе линейного опорного амплитудного сигнала 1102 AFMCW и линейного входного амплитудного сигнала 1104 AFMCW.
[000232] Наконец, первый усиленный входной электрический сигнал 826 AFMCW может дополнительно использоваться компонентом 316 контроллера для определения данных объекта 325. Например, на основе разницы 1108 во времени между вторым моментом времени t2 и первым моментом времени t1 компонент 316 контроллера может определить расстояние 390 в соответствии с уравнением (2).
[000233] Таким образом, можно сказать, что период 902 амплитудной модуляции указывает на разницу во времени между вторым моментом времени t2 и первым моментом времени t1, когда объект 325 расположен в окружении 250 на пороговом расстоянии определения дальности, связанном с лидарной системой 302 (то есть, когда расстояние 390 равно пороговому расстоянию определения дальности).
Сценарий 2
[000234] Со ссылкой на фиг. 12, на которой изображено второе представление 1200 формы волны изменения амплитуды опорного электрического сигнала AFMCW и входного электрического сигнала AFMCW, изображающее асимптотический опорный амплитудный сигнал 1202 AFMCW и асимптотический входной амплитудный сигнал 1204 AFMCW, в соответствии с первой реализацией лидарной системы 302. Асимптотический опорный амплитудный сигнал 1202 AFMCW и асимптотический входной амплитудный сигнал 1204 AFMCW были сформированы с помощью компонента 312 приемника на основании принятого опорного луча 822 AFMCW и входного луча 824 AFMCW, соответственно.
[000235] Как можно понять из фиг. 12, опорный луч 822 AFMCW был сформирован на основе выходного луча 818 AFMCW, который был амплитудно-модулирован компонентом 802 AM с использованием асимптотической периодической функции 1000, как описано выше со ссылкой на фиг. 10.
[000236] Продолжая ссылаться на фиг. 12 и возвращаясь к Фиг. 8, как и в Сценарии 1, сначала, в первый момент времени t1, опорный луч 822 AFMCW принимается компонентом 312 приемника, в то время как сканирующий луч 820 AFMCW направлен далее в сторону окружения 250 транспортного средства 220, что представлено асимптотическим опорным амплитудным сигналом 1202 AFMCW. Следовательно, отражаясь от объекта 325, сканирующий луч 820 AFMCW формирует входной луч 824 AFMCW, который может быть принят компонентом 312 приемника во второй момент времени t2, как представлено асимптотическим входным амплитудным сигналом 1204 AFMCW. Оба из асимптотического опорного амплитудного сигнала 1202 AFMCW и асимптотического входного амплитудного сигнала 1204 AFMCW непрерывно растут в пределах периода 902 амплитудной модуляции в соответствии с асимптотической периодической функцией 1000.
[000237] Постоянная разность 1206 асимптотической амплитуды, вызванная ослаблением входного луча 824 AFMCW, таким образом, может быть компенсирована компонентом 312 приемника, формирующим смесь опорного электрического сигнала AFMCW и входного электрического сигнала AFMCW, таким образом, генерируя первый усиленный входной электрический сигнал 826 AFMCW. Амплитуда первого усиленного входного электрического сигнала AFMCW может быть определена, например, в соответствии с уравнением (6) на основе асимптотического опорного амплитудного сигнала 1202 AFMCW и асимптотического входного амплитудного сигнала 1204 AFMCW.
[000238] Как и в сценарии 1, компонент 316 контроллера может дополнительно продолжить определение расстояния 390 до объекта 325 с использованием усиленного таким образом входного электрического сигнала AFMCW на основе разницы 1108 во времени в соответствии с уравнением (2).
[000239] Согласно первой реализации лидарной системы 302, как в сценарии 1, так и в сценарии 2, поскольку период 902 амплитудной модуляции предварительно определен на основе значения порогового расстояния определения дальности, связанного с лидарной системой 302, можно сказать, что каждый из линейного входного амплитудного сигнала 1104 AFMCW и асимптотического входного амплитудного сигнала 1204 AFMCW соответственно усиливается линейным опорным амплитудным сигналом 1102 AFMCW, и асимптотическим опорным амплитудным сигналом 1202 AFMCW в зависимости от расстояния от лидарной системы 302 до одного или нескольких объектов в окружении 250 транспортного средства 220, тем самым компенсируя ослабление входного луча 824 AFMCW. Другими словами, чем дальше объект 325 расположен от лидарной системы 302, тем больше будет амплитуда первого усиленного входного электрического сигнала 826 AFMCW.
Вторая реализация лидарной системы
[000240] Со ссылкой на фиг. 13 изображена принципиальная схема второй реализации лидарной системы 302 в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии. В частности, разницей между первой реализацией лидарной системы 302 и второй реализацией лидарной системы 302 является то, что последняя включает в себя компонент 802 АМ, установленный на пути опорного луча 322 FMCW.
[000241] Как можно понять из фиг. 13, компонент 304 источника света FMCW направляет выходной луч 318 FMCW на компонент 310 светоделителя, который разделяет его на сканирующий луч 320 FMCW и опорный луч 322 FMCW. Сканирующий луч 320 FMCW дополнительно излучается далее в сторону окружения 250, а опорный луч 322 FMCW направляется на компонент 802 AM. Соответственно, компонент 802 AM выполнен с возможностью формировать опорный луч 822 AFMCW, который дополнительно направляется на компонент 312 приемника вместе с входным лучом 324 FMCW, формируемым сканирующим лучом 320 FMCW путем отражения от объекта 325. Путь формирования смеси опорного электрического сигнала AFMCW и входного электрического сигналаа FMCW, компонент 312 приемника может быть, таким образом, выполнен с возможностью формировать второй усиленный входной электрический сигнал AFMCW 1326, в соответствии со второй реализацией лидарной системы 302.
[000242] Кроме того, можно понять, что во второй реализации лидарной системы 302 только опорный луч 322 FMCW модулируется по амплитуде компонентом 802 AM без амплитудной модуляции сканирующего луча 320 FMCW, что приводит к различным формам волны изменения амплитуды, связанным с ними, что теперь будет описано со ссылкой на фиг. 14 и 15.
Сценарий 1
[000243] Со ссылкой на фиг. 14, на которой изображено третье представление 1400 формы волны изменения амплитуды опорного электрического сигнала AFMCW и входного электрического сигнала FMCW, которые были сформированы компонентом 312 приемника в ответ на прием опорного луча 822 AFMCW и входного луча 324 FMCW, соответственно, в соответствии со второй реализацией лидарной системы 302. Опорный электрический сигнал AFMCW и входной электрический сигнал FMCW соответственно представлены линейным опорным амплитудным сигналом 1102 AFMCW и входным амплитудным сигналом 1404 FMCW.
[000244] Продолжая ссылаться на фиг. 14 и возвращаясь к Фиг. 13, сначала, в первый момент времени t1, опорный луч 822 AFMCW принимается компонентом 312 приемника, в то время как сканирующий луч 320 FMCW направлен далее в сторону окружения 250 транспортного средства 220, что представлено линейным опорным амплитудным сигналом 1102 AFMCW. Следовательно, отразившись от объекта 325, сканирующий луч 320 FMCW формирует входной луч 324 FMCW, который может быть принят компонентом 312 приемника во второй момент времени t2, что представлено входным амплитудным сигналом 1404 FMCW. Линейный опорный амплитудный сигнал 1102 AFMCW непрерывно растет в течение периода 902 амплитудной модуляции, в соответствии с линейной периодической функцией 900. С другой стороны, входной амплитудный сигнал FMCW, поскольку он не модулирован по амплитуде, имеет постоянное значение в течение периода от второго момента времени t2.
[000245] Кроме того, первая переменная разность 1406 линейной амплитуды, вызванная ослаблением входного луча 324 FMCW, может быть скорректирована компонентом 312 приемника, формирующего смесь опорного электрического сигнала AFMCW и входного электрического сигнала FMCW, таким образом, генерируя второй усиленный входной электрический сигнал 1326 AFMCW, аналогично формированию первого усиленного входного электрического сигнала 826 AFMCW.
[000246] Как упоминалось ранее, компонент 316 контроллера может дополнительно использовать второй усиленный входной электрический сигнал 1326 AFMCW для определения расстояния 390 до объекта 325 на основе разницы 1108 во времени.
Сценарий 2
[000247] Со ссылкой на фиг. 15, на которой изображено четвертое представление 1500 формы волны изменения амплитуды опорного электрического сигнала AFMCW и входного электрического сигнала FMCW, которые были сформированы компонентом 312 приемника в ответ на прием опорного луча 822 AFMCW и входного луча 324 FMCW соответственно, в соответствии со второй реализацией лидарной системы 302. Опорный электрический сигнал AFMCW и входной электрический сигнал FMCW соответственно представлены асимптотическим опорным амплитудным сигналом 1202 AFMCW и входным амплитудным сигналом 1404 FMCW.
[000248] Продолжая ссылаться на фиг. 15 и возвращаясь к Фиг. 13, сначала, в первый момент времени t1, опорный луч 822 AFMCW принимается компонентом 312 приемника, в то время как сканирующий луч 320 FMCW направлен далее в сторону окружения 250 транспортного средства 220, это представлено асимптотическим опорным амплитудным сигналом 1202 AFMCW. Следовательно, отразившись от объекта 325, сканирующий луч 320 FMCW формирует входной луч 324 FMCW, который может быть принят компонентом 312 приемника во второй момент времени t2, что представлено входным амплитудным сигналом 1404 FMCW. Асимптотический опорный амплитудный сигнал 1202 AFMCW непрерывно растет в течение периода 902 амплитудной модуляции, в соответствии с асимптотической периодической функцией 1000. С другой стороны, входной амплитудный сигнал FMCW, поскольку он не модулирован по амплитуде, имеет постоянное значение в течение периода от второго момента времени t2.
[000249] Первая переменная разность 1506 асимптотической амплитуды, вызванная ослаблением входного луча 324 FMCW, растет со временем (и, таким образом, с расстоянием 390 до объекта 325). Соответственно, первая переменная разность 1506 асимптотической амплитуды может быть скорректирована компонентом 312 приемника, формирующего смесь опорного электрического сигнала AFMCW и входного электрического сигнала FMCW, таким образом, генерируя второй усиленный входной электрический сигнал 1326 AFMCW, аналогично формированию первого усиленного входного электрического сигнала 826 AFMCW.
[000250] Как упоминалось ранее, компонент 316 контроллера может дополнительно использовать второй усиленный входной электрический сигнал 1326 AFMCW для определения расстояния 390 до объекта 325 на основе разницы 1108 во времени.
[000251] Согласно второй реализации лидарной системы 302, как в сценарии 1, так и в сценарии 2, поскольку период 902 амплитудной модуляции предварительно определен на основе значения порогового расстояния определения дальности, связанного с лидарной системой 302, можно сказать, что входной амплитудный сигнал 1404 FMCW, связанный с входным лучом 324 FMCW, усиливается с использованием одного из линейного опорного амплитудного сигнала 1102 AFMCW и асимптотического опорного амплитудного сигнала 1202 AFMCW в зависимости от расстояния от лидарной системы 302 до одного или нескольких объектов в окружении 250 транспортного средства 220. Другими словами, чем дальше объект 325 расположен от лидарной системы 302, тем больше будет амплитуда второго усиленного входного электрического сигнала 1326 AFMCW. Таким образом, лидарная система 302 выполнена с возможностью компенсации ослабления входного луча 324 FMCW с использованием компонента 802 AM.
Третья реализация лидарной системы
[000252] Со ссылкой на фиг. 16 изображена принципиальная схема третьей реализации лидарной системы 302 в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии. В частности, разница между третьей реализацией лидарной системы 302 и второй реализацией лидарной системы 302 заключается в том, что первая включает в себя компонент 802 AM, установленный на пути сканирующего луча 320 FMCW.
[000253] Как можно понять из фиг. 16, компонент 304 источника света FMCW направляет выходной луч 318 FMCW на компонент 310 светоделителя, который разделяет его на сканирующий луч 320 FMCW и опорный луч 322 FMCW. Сканирующий луч 320 FMCW направляется на компонент 802 AM, тогда как опорный луч 322 FMCW направляется на компонент 312 приемника. Соответственно, компонент 802 AM таким образом выполнен с возможностью формировать сканирующий луч 820 AFMCW, который далее излучается в сторону окружения 250, который, отражаясь от объекта 325, может приниматься компонентом 312 приемника в форме входного луча 824 AFMCW. В связи с этим, компонент 312 приемника может быть дополнительно выполнен с возможностью приема опорного луча 322 FMCW и входного луча 824 AFMCW, тем самым генерируя опорный электрический сигнал FMCW и входной электрический сигнал AFMCW, соответственно. Компонент 312 приемника может быть дополнительно выполнен с возможностью формировать смесь опорного электрического сигнала FMCW и входного электрического сигнала AFMCW, тем самым генерируя третий усиленный входной электрический сигнал 1626 AFMCW для отправки в компонент 316 контроллера для дальнейшего анализа.
[000254] Как это может быть дополнительно оценено, в третьей реализации лидарной системы 302, только сканирующий луч 320 FMCW модулируется по амплитуде компонентом 802 AM, без амплитудной модуляции опорного луча 322 FMCW, что приводит к различным формам волны изменения амплитуды, связанным с ним, что теперь будет описано со ссылкой на фиг. 17 и 18.
Сценарий 1
[000255] Со ссылкой на фиг. 17, на которой изображено пятое представление 1700 формы волны изменения амплитуды опорного электрического сигнала FMCW и входного электрического сигнала AFMCW, которые были сформированы компонентом 312 приемника в ответ на получение опорного луча 322 FMCW и входного луча 824 AFMCW, соответственно, в соответствии с третьей реализацией лидарной системы 302. Опорный электрический сигнал FMCW и входной электрический сигнал AFMCW соответственно представлены опорным амплитудным сигналом 1702 FMCW и линейным входным амплитудным сигналом 1104 AFMCW.
[000256] Продолжая ссылаться на фиг. 17 и возвращаясь к Фиг. 16, сначала, в первый момент времени t1, опорный луч 322 FMCW принимается компонентом 312 приемника, в то время как сканирующий луч 820 AFMCW направлен далее в сторону окружения 250 транспортного средства 220, что представлено опорным амплитудным сигналом 1702 FMCW. Следовательно, отражаясь от объекта 325, сканирующий луч 820 AFMCW формирует входной луч 824 AFMCW, который может быть принят компонентом 312 приемника во второй момент времени t2, что представлено линейным входным амплитудным сигналом 1104 AFMCW. Опорный амплитудный сигнал 1702 FMCW, как не амплитудно-модулированный, имеет постоянное значение в течение периода 902 амплитудной модуляции. С другой стороны, линейный входной амплитудный сигнал 1104 AFMCW непрерывно растет в течение периода от второго момента времени t2 в соответствии с линейной периодической функцией 900.
[000257] Кроме того, вторая переменная разность 1706 линейной амплитуды, вызванная ослаблением входного луча 824 AFMCW, уменьшается со временем (и, следовательно, с расстоянием 390 до объекта 325). Соответственно, вторая переменная разность 1706 линейной амплитуды может быть скорректирована компонентом 312 приемника, формирующим смесь опорного электрического сигнала FMCW и входного электрического сигнала AFMCW, тем самым генерируя третий усиленный входной электрический сигнал 1626 AFMCW, аналогично формированию первого усиленного входного электрического сигнала 826 AFMCW и второго усиленного входного электрического сигнала 1326 AFMCW (на основе уравнения (6), например).
[000258] Как упоминалось ранее, компонент 316 контроллера может дополнительно использовать третий усиленный входной электрический сигнал 1626 AFMCW для определения расстояния 390 до объекта 325 на основе разницы 1108 во времени.
Сценарий 2
[000259] Со ссылкой на фиг. 18, на которой изображено шестое представление 1800 формы волны изменения амплитуды опорного электрического сигнала FMCW и входного электрического сигнала AFMCW, которые были сформированы компонентом 312 приемника в ответ на прием опорного луча 322 FMCW и входного луча 824 AFMCW, соответственно, в соответствии с третьей реализацией лидарной системы 302. Опорный электрический сигнал FMCW, и входной электрический сигнал AFMCW соответственно представлены опорным амплитудным сигналом 1702 FMCW и асимптотическим входным амплитудным сигналом 1204 AFMCW.
[000260] Продолжая ссылаться на фиг. 18 и снова ссылаясь на фиг. 16, сначала, в первый момент времени t1, опорный луч 322 FMCW принимается компонентом 312 приемника, в то время как сканирующий луч 820 AFMCW направляется далее в сторону окружения 250 транспортного средства 220, что представлено опорным амплитудным сигналом 1702 FMCW. Следовательно, отражаясь от объекта 325, сканирующий луч 820 AFMCW формирует входной луч 824 AFMCW, который может быть принят компонентом 312 приемника во второй момент времени t2, что представлено асимптотическим входным амплитудным сигналом 1204 AFMCW. Опорный амплитудный сигнал 1702 FMCW, как не амплитудно-модулированный, имеет постоянное значение в течение периода 902 амплитудной модуляции. С другой стороны, асимптотический входной амплитудный сигнал 1204 AFMCW непрерывно растет в течение периода от второго момента времени t2 в соответствии с асимптотической периодической функцией 1000.
[000261] Кроме того, вторая переменная разность 1806 асимптотической амплитуды, вызванная ослаблением входного луча 824 AFMCW, уменьшается со временем (и, таким образом, с расстоянием 390 до объекта 325). Соответственно, вторая переменная разность 1806 асимптотической амплитуды может быть скорректирована компонентом 312 приемника, формирующим смесь опорного электрического сигнала FMCW и входного электрического сигнала AFMCW, тем самым генерируя третий усиленный входной электрический сигнал 1626 AFMCW, аналогично формированию первого усиленного входного электрического сигнала 826 AFMCW и второго усиленного входного электрического сигнала 1326 AFMCW (например, на основе уравнения (6)).
[000262] Как упоминалось ранее, компонент 316 контроллера может дополнительно использовать третий усиленный входной электрический сигнал 1626 AFMCW для определения расстояния 390 до объекта 325 на основе разницы 1108 во времени.
[000263] Согласно третьей реализации лидарной системы 302, как в сценарии 1, так и в сценарии 2, поскольку период 902 амплитудной модуляции предварительно определен на основе значения порогового расстояния определения дальности, связанного с лидарной системой 302, можно сказать, что каждый из линейного входного амплитудного сигнала 1104 AFMCW и асимптотического входного амплитудного сигнала 1204 AFMCW, связанный с входным лучом 824 AFMCW, усиливают с использованием опорного амплитудного сигнала 1702 FMCW в зависимости от расстояния от лидарной системы 302 до одного или нескольких объектов в окружении 250 транспортного средства 220. Другими словами, чем дальше объект 325 расположен от лидарной системы 302, тем больше будет амплитуда третьего усиленного входного электрического сигнала 1626 AFMCW. Таким образом, лидарная система 302 выполнена с возможностью компенсации ослабления входного луча 824 AFMCW с использованием компонента 802 AM.
Четвертая реализация лидарной системы
[000264] Со ссылкой на фиг. 19 изображена принципиальная схема четвертой реализации лидарной системы 302 в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии. В частности, в соответствии с четвертой реализацией лидарная система 302 включает в себя компонент 802 АМ, установленный на пути опорного луча 322 FMCW, и второй компонент 1902 AM, установленный на пути сканирующего луча 320 FMCW.
[000265] Согласно неограничивающим вариантам осуществления настоящей технологии второй компонент 1902 AM может быть реализован аналогично компоненту 802 AM, как описано выше со ссылкой на фиг. 8-10.
[000266] Как можно понять из фиг. 19, компонент 304 источника света FMCW направляет выходной луч 318 FMCW на компонент 310 светоделителя, который разделяет его на сканирующий луч 320 FMCW и опорный луч 322 FMCW. Сканирующий луч 320 FMCW направляется на второй компонент 1902 AM, в то время как опорный луч 322 FMCW направляется на компонент 802 AM. Соответственно, второй компонент 1902 АМ выполнен с возможностью формирования второго сканирующего луча 1920 AFMCW, который далее излучается в направлении окружения 250, в то время как компонент 802 АМ, таким образом, выполнен с возможностью формирования опорного луча 822 AFMCW, который дополнительно направляется к компоненту приемника. Второй сканирующий луч 1920 AFMCW, отразившись от объекта 325, формирует второй входной луч 1924 AFMCW, который дополнительно может приниматься компонентом 312 приемника.
[000267] Следовательно, компонент 312 приемника может быть дополнительно выполнен с возможностью приема опорного луча 822 AFMCW и второго входного луча 1924 AFMCW, тем самым генерируя опорный электрический сигнал AFMCW и второй входной электрический сигнал AFMCW, соответственно. Компонент 312 приемника может быть дополнительно выполнен с возможностью формировать смесь опорного электрического сигнала AFMCW и второго входного электрического сигнала AFMCW, тем самым генерируя четвертый усиленный входной электрический сигнал 1926 AFMCW для дальнейшей отправки его к компоненту 316 контроллера.
[000268] В вариантах осуществления четвертой реализации лидарной системы 302, изображенных на фиг. 19, как сканирующий луч 320 FMCW, так и опорный луч 322 FMCW модулируются по амплитуде вторым компонентом 1902 AM и компонентом 802 AM, соответственно. Соответственно, в тех неограничивающих вариантах осуществления четвертой реализации лидарной системы 302, где компонент 802 AM и второй компонент 1902 AM выполнены с возможностью применения идентичных функций амплитудной модуляции (таких как одна из линейной периодической функции 900 и асимптотической периодической функции 1000), четвертый усиленный входной электрический сигнал 1926 AFMCW формируется аналогично первому усиленному входному электрическому сигналу 826 AFMCW, как описано выше со ссылкой на фиг. 8, 11 и 12.
[000269] Однако, например, в некоторых неограничивающих вариантах осуществления четвертой реализации лидарной системы 302 по меньшей мере один из компонента 802 AM и второго компонента 1902 AM может быть выполнен с возможностью применения функции амплитудной модуляции, которая обратна одной из линейной периодической функции 900 и асимптотической периодической функции 1000.
Сценарий 1
[000270] Со ссылкой на фиг. 20, на которой изображено седьмое представление 2000 формы волны изменения амплитуды опорного электрического сигнала AFMCW и второго входного электрического сигнала AFMCW, которые были сформированы компонентом 312 приемника в ответ на прием опорного луча 822 AFMCW и второго входного луча 1924 AFMCW, соответственно, в соответствии с четвертой реализацией лидарной системы 302. Опорный электрический сигнал AFMCW и второй входной электрический сигнал AFMCW соответственно представлены линейным опорным амплитудным сигналом 1102 AFMCW и обратным линейным входным амплитудным сигналом 2004 AFMCW.
[000271] Продолжая ссылаться на фиг. 20 и возвращаясь к фиг. 19, сначала, в первый момент времени t1, опорный луч 822 AFMCW принимается компонентом 312 приемника, в то время как второй сканирующий луч 1920 AFMCW направляется далее в сторону окружения 250 транспортного средства 220, что представлено линейным опорным амплитудным сигналом 1102 AFMCW. Следовательно, отражаясь от объекта 325, второй сканирующий луч 1920 AFMCW формирует второй входной луч 1924 AFMCW, который может быть принят компонентом 312 приемника во второй момент времени t2, что представлено обратным линейным входным амплитудным сигналом 2004 AFMCW. Линейный опорный амплитудный сигнал 1102 AFMCW непрерывно растет в течение периода 902 амплитудной модуляции в соответствии с линейной периодической функцией 900. С другой стороны, обратный линейный входной амплитудный сигнал 2004 AFMCW непрерывно уменьшается в течение периода, начиная со второго момента времени t2, в соответствии с обратной конфигурацией линейной периодической функции 900.
[000272] Кроме того, третья переменная разность 2006 линейной амплитуды, вызванная ослаблением второго входного луча 1924 AFMCW, увеличивается со временем (и, таким образом, с расстоянием 390 до объекта 325). Соответственно, третья переменная разность 2006 линейной амплитуды может быть скорректирована компонентом 312 приемника, формирующим смесь опорного электрического сигнала AFMCW и второго входного электрического сигнала AFMCW, тем самым генерируя четвертый усиленный входной электрический сигнал 1926 AFMCW, аналогично описанному выше формированию усиленного входного электрического сигнала AFMCW в соответствии с первой, второй и третьей реализациями лидарной системы 302 (например, на основе уравнения (6)).
[000273] Как упоминалось ранее, компонент 316 контроллера может дополнительно использовать четвертый усиленный входной электрический сигнал 1926 AFMCW для определения, например, расстояния 390 до объекта 325 на основе разницы 1108 во времени.
Сценарий 2
[000274] Со ссылкой на фиг. 21, на которой изображено восьмое представление 2100 формы волны изменения амплитуды опорного электрического сигнала AFMCW и второго входного электрического сигнала AFMCW, которые были сформированы компонентом 312 приемника в ответ на прием опорного луча 822 AFMCW и второго входного луча 1924 AFMCW, соответственно, в соответствии с четвертой реализацией лидарной системы 302. Опорный электрический сигнал AFMCW и второй входной электрический сигнал AFMCW соответственно представлены асимптотическим опорным амплитудным сигналом 1202 AFMCW и обратным асимптотическим входным амплитудным сигналом 2104 AFMCW.
[000275] Продолжая ссылаться на фиг. 21 и возвращаясь к Фиг. 19, сначала, в первый момент времени t1, опорный луч 822 AFMCW принимается компонентом 312 приемника, в то время как второй сканирующий луч 1920 AFMCW направляется далее в сторону окружения 250 транспортного средства 220, что представлено асимптотическим опорным амплитудным сигналом 1202 AFMCW. Следовательно, отражаясь от объекта 325, второй сканирующий луч 1920 AFMCW формирует второй входной луч 1924 AFMCW, который может быть принят компонентом 312 приемника во второй момент времени t2, что представлено обратным асимптотическим входным амплитудным сигналом 2104 AFMCW. Асимптотический опорный амплитудный сигнал 1202 AFMCW непрерывно растет в течение периода 902 амплитудной модуляции в соответствии с асимптотической периодической функцией 1000. С другой стороны, обратный асимптотический входной амплитудный сигнал 2104 AFMCW непрерывно уменьшается в течение периода от второго момента времени t2 в соответствии с обратной конфигурацией асимптотической периодической функции 1000.
[000276] Кроме того, третья переменная разность 2106 асимптотической амплитуды, вызванная ослаблением второго входного луча 1924 AFMCW, растет со временем (и, таким образом, с расстоянием 390 до объекта 325). Соответственно, третья переменная разница 2106 асимптотической амплитуды может быть скорректирована компонентом 312 приемника, формирующим смесь опорного электрического сигнала AFMCW и второго входного электрического сигнала AFMCW, тем самым генерируя четвертый усиленный входной электрический сигнал 1926 AFMCW, аналогично описанному выше формированию усиленного входного электрического сигнала AFMCW в соответствии с первой, второй и третьей реализациями лидарной системы 302 (например, на основе уравнения (6)).
[000277] Как упоминалось ранее, компонент 316 контроллера может дополнительно использовать третий усиленный входной электрический сигнал 1626 AFMCW для определения, например, расстояния 390 до объекта 325 на основе разницы 1108 во времени.
[000278] Согласно этим вариантам осуществления четвертой реализации лидарной системы 302, как в сценарии 1, так и в сценарии 2, поскольку период 902 амплитудной модуляции предварительно определен на основе значения порогового расстояния определения дальности, связанного с лидарной системой 302, можно сказать, что каждый один из обратного линейного входного амплитудного сигнала 2004 AFMCW и обратного асимптотического входного амплитудного сигнала 2104 AFMCW, связанный со вторым входным лучом 1924 AFMCW, усиливается с использованием линейного опорного амплитудного сигнала 1102 AFMCW и асимптотического опорного амплитудного сигнала 1202 AFMCW, соответственно, в зависимости от расстояния от лидарной системы 302 до одного или нескольких объектов в окружении 250 транспортного средства 220. Другими словами, чем дальше объект 325 расположен от лидарной системы 302, тем больше будет амплитуда четвертого усиленного входного электрического сигнала 1926 AFMCW. Посредством такого стимулирования лидарная система 302 выполнена с возможностью компенсации ослабления второго входного луча 1924 AFMCW с использованием компонента 802 AM и второго компонента 1902 AM.
[000279] В других неограничивающих вариантах осуществления четвертой реализации лидарной системы 302, каждый из компонента 802 AM и второго компонента 1902 AM может быть выполнен с возможностью применения различных функций амплитудной модуляции.
Сценарий 1
[000280] Со ссылкой на фиг. 22, на которой изображено девятое представление 2200 формы волны изменения амплитуды опорного электрического сигнала AFMCW и второго входного электрического сигнала AFMCW, которые были сформированы компонентом 312 приемника в ответ на прием опорного луча 822 AFMCW и второго входного луча 1924 AFMCW, соответственно, в соответствии с четвертой реализацией лидарной системы 302. Опорный электрический сигнал AFMCW и второй входной электрический сигнал AFMCW соответственно представлены линейным опорным амплитудным сигналом 1102 AFMCW и асимптотическим входным амплитудным сигналом 1204 AFMCW.
[000281] Продолжая ссылаться на фиг. 22 и возвращаясь к Фиг. 19, сначала, в первый момент времени t1, опорный луч 822 AFMCW принимается компонентом 312 приемника, в то время как второй сканирующий луч 1920 AFMCW направляется далее в сторону окружения 250 транспортного средства 220, что представлено линейным опорным амплитудным сигналом 1102 AFMCW. Следовательно, отражаясь от объекта 325, второй сканирующий луч 1920 AFMCW формирует второй входной луч 1924 AFMCW, который может быть принят компонентом 312 приемника во второй момент времени t2, что представлено асимптотическим входным амплитудным сигналом 1204 AFMCW. Линейный опорный амплитудный сигнал 1102 AFMCW непрерывно растет в течение периода 902 амплитудной модуляции в соответствии с линейной периодической функцией 900. С другой стороны, асимптотический входной амплитудный сигнал 1204 AFMCW непрерывно растет в течение периода от второго момента времени t2 в соответствии с асимптотической периодической функцией 1000.
[000282] Кроме того, четвертая переменная разность 2206 линейной амплитуды, вызванная ослаблением второго входного луча 1924 AFMCW, уменьшается со временем (и, таким образом, с расстоянием 390 до объекта 325). Соответственно, четвертая переменная разность 2206 линейной амплитуды может быть скорректирована компонентом 312 приемника, формирующим смесь опорного электрического сигнала AFMCW и второго входного электрического сигнала AFMCW, тем самым генерируя четвертый усиленный входной электрический сигнал 1926 AFMCW, аналогично описанному выше формированию усиленного входного электрического сигнала AFMCW в соответствии с первой, второй и третьей реализациями лидарной системы 302 (например, на основе уравнения (6)).
[000283] Как упоминалось ранее, компонент 316 контроллера может дополнительно использовать четвертый усиленный входной электрический сигнал 1926 AFMCW для определения, например, расстояния 390 до объекта 325 на основе разницы 1108 во времени.
Сценарий 2
[000284] Со ссылкой на фиг. 23, на которой изображено десятое представление 2300 формы волны изменения амплитуды опорного электрического сигнала AFMCW и второго входного электрического сигнала AFMCW, которые были сформированы компонентом 312 приемника в ответ на прием опорного луча 822 AFMCW и второго входного луча 1924 AFMCW, соответственно, в соответствии с четвертой реализацией лидарной системы 302. Опорный электрический сигнал AFMCW и второй входной электрический сигнал AFMCW соответственно представлены асимптотическим опорным амплитудным сигналом 1202 AFMCW и линейным входным амплитудным сигналом 1104 AFMCW.
[000285] Продолжая ссылаться на фиг. 23 и возвращаясь к Фиг. 19, сначала, в первый момент времени t1, опорный луч 822 AFMCW принимается компонентом 312 приемника, в то время как второй сканирующий луч 1920 AFMCW направляется далее к окружению 250 транспортного средства 220, что представлено асимптотическим опорным амплитудным сигналом 1202 AFMCW. Следовательно, отражаясь от объекта 325, второй сканирующий луч 1920 AFMCW формирует второй входной луч 1924 AFMCW, который может быть принят компонентом 312 приемника во второй момент времени t2, что представлено линейным входным амплитудным сигналом 1104 AFMCW. Асимптотический опорный амплитудный сигнал 1202 AFMCW непрерывно растет в течение периода 902 амплитудной модуляции в соответствии с асимптотической периодической функцией 1000. С другой стороны, линейный входной амплитудный сигнал 1104 AFMCW непрерывно растет в течение периода от второго момента времени t2 в соответствии с линейной периодической функцией 900.
[000286] Кроме того, четвертая переменная разность 2306 асимптотической амплитуды, вызванная ослаблением второго входного луча 1924 AFMCW, уменьшается со временем (и, таким образом, с расстоянием 390 до объекта 325). Соответственно, четвертая переменная разность 2306 асимптотической амплитуды может быть скорректирована компонентом приемника 312, формирующим смесь опорного электрического сигнала AFMCW и второго входного электрического сигнала AFMCW, тем самым генерируя четвертый усиленный входной электрический сигнал 1926 AFMCW, аналогично описанному выше формированию усиленного входного электрического сигнала AFMCW в соответствии с первой, второй и третьей реализациями лидарной системы 302 (например, на основе уравнения (6)).
[000287] Как упоминалось ранее, компонент 316 контроллера может дополнительно использовать третий усиленный входной электрический сигнал 1626 AFMCW для определения, например, расстояния 390 до объекта 325 на основе разницы 1108 во времени.
[000288] Согласно этим вариантам осуществления четвертой реализации лидарной системы 302, как в сценарии 1, так и в сценарии 2, поскольку период 902 амплитудной модуляции предварительно определен на основе значения порогового расстояния определения дальности, связанного с лидарной системой 302, можно сказать, что каждый один из асимптотического входного амплитудного сигнала 1204 AFMCW и линейного входного амплитудного сигнала 1104 AFMCW, связанный со вторым входным лучом 1924 AFMCW, усиливается с использованием линейного опорного амплитудного сигнала 1102 AFMCW и асимптотического опорного амплитудного сигнала 1202 AFMCW, соответственно, в зависимости от расстояния от лидарной системы 302 до одного или нескольких объектов в окружении 250 транспортного средства 220. Другими словами, чем дальше объект 325 расположен от лидарной системы 302, тем больше будет амплитуда четвертого усиленного входного электрического сигнала 1926 AFMCW. Посредством такого стимулирования лидарная система 302 выполнена с возможностью компенсации ослабления второго входного луча 1924 AFMCW с использованием компонента 802 AM и второго компонента 1902 AM.
[000289] Учитывая архитектуру и примеры, приведенные выше, можно реализовать способ работы лидарной системы (например, лидарной системы 302). Теперь со ссылкой на фиг. 24 изображена блок-схема способа 2400 согласно неограничивающим вариантам осуществления настоящей технологии. Способ 2400 может выполняться компонентом 316 контроллера.
[000290] Согласно некоторым неограничивающим вариантам осуществления настоящей технологии, как упоминалось ранее, лидарная система 302 может быть связана со значением порогового расстояния определения дальности, указывающим самое большое расстояние, на котором лидарная система 302 может быть выполнена с возможностью физического обнаружения объекта в окружении 250 (такого как объект 325). Пороговое расстояние определения дальности может зависеть от конкретных характеристик лидарной системы 302, таких как, например, характеристики компонента 304 источника света FMCW, компонента 310 светоделителя и компонента 312 приемника.
Этап 2402: СОЗДАНИЕ, ПОСРЕДСТВОМ ЛИДАРНОЙ СИСТЕМЫ, НЕПРЕРЫВНОЙ ВОЛНЫ
[000291] Способ 2400 начинается на этапе 2402, на котором компонент 306 источника света может быть сконфигурирован с помощью компонента 316 контроллера для формирования луча CW, например, выходного луча 317 CW.
[000292] В некоторых неограничивающих вариантах осуществления настоящей технологии формально выходной луч 317 CW может быть представлен уравнением (1) и характеризоваться определенными параметрами, такими как амплитуда 406 CW и частота 404 CW, среди других параметров, как описано выше со ссылкой на фиг. 4.
Этап 2404: МОДУЛЯЦИЯ, ПОСРЕДСТВОМ ЛИДАРНОЙ СИСТЕМЫ, ЧАСТОТЫ НЕПРЕРЫВНОЙ ВОЛНЫ ДЛЯ ГЕНЕРИРОВАНИЯ СИГНАЛА НЕПРЕРЫВНОЙ ВОЛНЫ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ (FMCW)
[000293] На этапе 2404, согласно некоторым неограничивающим вариантам осуществления настоящей технологии, компонент 316 контроллера может быть выполнен с возможностью частотной модуляции выходного луча 317 CW, тем самым генерируя луч FMCW, например, выходной луч 318 FMCW. С этой целью лидарная система 302 может дополнительно содержать частотный модулятор, такой как компонент 308 FM, описанный выше со ссылкой на фиг. 3.
[000294] В некоторых неограничивающих вариантах осуществления настоящей технологии компонент 306 источника света и компонент 308 FM могут образовывать неотъемлемый компонент лидарной системы 302, который упоминается в данном документе как компонент 304 источника света FMCW.
[000295] Кроме того, согласно некоторым неограничивающим вариантам осуществления настоящей технологии, компонент 308 FM может быть выполнен с возможностью модуляции частоты 404 CW выходного луча 317 CW в соответствии с заданной функцией частотной модуляции. В некоторых неограничивающих вариантах осуществления настоящей технологии функция частотной модуляции может быть функцией ЛЧМ. В некоторых неограничивающих вариантах осуществления настоящей технологии функция частотной модуляции может быть пилообразной функцией 500, выполненной с возможностью модуляции частоты 404 CW выходного луча 317 CW в течение периода 502 пилообразной частотной модуляции, как описано выше со ссылкой на фиг. 5. В других неограничивающих вариантах осуществления настоящей технологии функция частотной модуляции может быть треугольной функцией 600, выполненной с возможностью модуляции частоты 404 CW выходного луча 317 CW в течение периода 602 треугольной частотной модуляции, как описано выше со ссылкой на фиг. 6.
[000296] Кроме того, в некоторых неограничивающих вариантах осуществления настоящей технологии выходной луч 318 FMCW может дополнительно быть направлен на компонент 310 светоделителя. С этой целью компонент 310 светоделителя может быть выполнен с возможностью деления выходного луча 318 FMCW на (1) сканирующий луч 320 FMCW, который направляется далее в сторону окружения 250 транспортного средства 220; и (2) опорный луч 322 FMCW, который направляется в компонент 312 приемника, как описано выше со ссылкой на фиг. 3. Следовательно, сканирующий луч 320 FMCW, отражаясь от объекта 325, может, таким образом, создавать входной луч 324 FMCW.
[000297] И, наконец, компонент 312 приемника может быть сконфигурирован, компонентом контроллера 316, чтобы принимать опорный луч 322 FMCW и входной луч 324 FMCW и на их основании формировать опорный электрический сигнал FMCW и входной электрический сигнал FMCW, соответственно. В некоторых неограничивающих вариантах осуществления настоящей технологии, компонент 312 приемника может быть дополнительно выполнен с возможностью формировать смесь сформированного таким образом опорного электрического сигнала FMCW и входного электрического сигнала FMCW для передачи в компонент 316 контроллера для дальнейшего анализа. В этом отношении компонент 316 контроллера на основе анализа смеси электрических сигналов может быть выполнен с возможностью определения данных объекта 325, таких как расстояние 390 до объекта 325 и его мгновенная скорость 327 относительно лидарной системы 302, как описано выше со ссылкой на фиг. 7.
[000298] Однако, как отмечалось ранее, входной луч 324 FMCW может быть существенно ослаблен на расстоянии 390, например, из-за особенностей окружения 250. Соответственно, в некоторых неограничивающих вариантах осуществления настоящей технологии, компонент 316 контроллера может быть выполнен с возможностью усиливать один из выходного луча 318 FMCW, сканирующего луча 320 FMCW и опорного луча 322 FMCW.
[000299] Таким образом, способ 2400 переходит к этапу 2406.
Этап 2406: МОДУЛЯЦИЯ, ПОСРЕДСТВОМ ЛИДАРНОЙ СИСТЕМЫ, АМПЛИТУДЫ СИГНАЛА FMCW ДЛЯ ГЕНЕРИРОВАНИЯ СИГНАЛА НЕПРЕРЫВНОЙ ВОЛНЫ С АМПЛИТУДНО-ЧАСТОТНОЙ МОДУЛЯЦИЕЙ (AFMCW), ПРИЧЕМ МОДУЛЯЦИЯ АМПЛИТУДЫВКЛЮЧАЕТ В СЕБЯ МОДУЛЯЦИЮ, ПОСРЕДСТВОМ ЛИДАРНОЙ СИСТЕМЫ, АМПЛИТУДЫ В СООТВЕТСТВИИ С ПЕРИОДОМ АМПЛИТУДНОЙ МОДУЛЯЦИИ И ПЕРИОД АМПЛИТУДНОЙ МОДУЛЯЦИИ ПРЕДВАРИТЕЛЬНО ОПРЕДЕЛЯЕТСЯ НА ОСНОВЕ ПОРОГОВОГО РАССТОЯНИЯ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ
[000300] На этапе 2406, в некоторых неограничивающих вариантах осуществления настоящей технологии, компонент 316 контроллера может быть выполнен с возможностью усиления одного из выходного луча 318 FMCW, сканирующего луча 320 FMCW и опорного луча 322 FMCW, применяя к нему амплитудную модуляцию, тем самым генерируя соответствующий луч AFMCW.
[000301] С этой целью, согласно неограничивающим вариантам осуществления настоящей технологии, лидарная система 302 может дополнительно содержать по меньшей мере один амплитудный модулятор, такой как компонент 802 AM, как описано выше со ссылкой на фиг. 8.
[000302] Например, компонент 802 AM может быть выполнен с возможностью модуляции амплитуды 406 CW выходного луча 318 FMCW, тем самым генерируя выходной луч 818 AFMCW. С этой целью компонент 802 AM может быть выполнен с возможностью применения функции амплитудной модуляции к амплитуде 406 CW. В некоторых неограничивающих вариантах осуществления настоящей технологии функция амплитудной модуляции может быть периодической функцией, такой как линейная периодическая функция 900 и асимптотическая периодическая функция 1000, соответственно, изображенные на фиг. 9 и 10.
[000303] Согласно некоторым неограничивающим вариантам осуществления настоящей технологии каждая из линейной периодической функции 900 и асимптотической периодической функции 1000 связана с периодом 902 амплитудной модуляции, в течение которого компонент 802 AM выполнен с возможностью модуляции амплитуды, связанной с соответствующим лучом FMCW.
[000304] В некоторых неограничивающих вариантах осуществления настоящей технологии период 902 амплитудной модуляции может быть определен на основе значения порогового расстояния определения дальности, связанного с лидарной системой 302. Другими словами, период 902 амплитудной модуляции может быть определен как равный времени прохождения туда и обратно, которое требуется, например, для того, чтобы сканирующий луч 320 FMCW прошел к объекту 325, когда он расположен на пороговом расстоянии определения дальности от лидарной системы 302; отразился от объекта 325; и вернулся обратно в лидарную систему 302. Соответственно, такой подход к модуляции выходного луча лидарной системы 302 (например, сканирующего луча 320 FMCW) может позволить усилить входной луч лидарной системы 302 (например, входной луч 824 AFMCW) в зависимости от расстояния 390, так что чем дальше объект 325 расположен от лидарной системы 302, тем больше будет амплитуда, связанная с входным лучом 824 AFMCW.
[000305] Кроме того, в некоторых неограничивающих вариантах осуществления настоящей технологии соответствующий один из периода 502 пилообразной частотной модуляции и периода треугольной частотной модуляции может быть предварительно определен равным периоду 902 амплитудной модуляции.
[000306] В некоторых неограничивающих вариантах осуществления настоящей технологии могут использоваться различные способы реализации компонента 802 AM, включая, однако, без ограничения:
регулируемый оптический модулятор MEMS;
электрооптический модулятор;
магнитооптический модулятор;
волоконно-оптический усилитель;
полупроводниковый оптический усилитель; и
другой источник света (например, другой источник света AFMCW).
[000307] Таким образом, чтобы применить функцию амплитудной модуляции, компонент 802 AM может быть выполнен с возможностью использования множества связанных с его соответствующими реализациями, включая, но не ограничиваясь этим: (1) глубокое ослабление светового луча на основе непрерывной волны с последующим непрерывным уменьшением уровня ослабления в соответствии с функцией амплитудной модуляции; (2) непрерывное увеличение уровня усиления светового луча на основе непрерывной волны; или (3) использование комбинированного подхода, учитывающего, например, уровень ослабления и уровень усиления светового луча на основе непрерывной волны.
[000308] В некоторых неограничивающих вариантах осуществления настоящей технологии компонент 802 AM может быть неотъемлемым компонентом компонента 304 источника света FMCW.
[000309] Как можно понять, в зависимости от того, как компонент 802 AM установлен в лидарной системе, могут быть предусмотрены его различные реализации.
[000310] Согласно некоторым неограничивающим вариантам осуществления настоящей технологии, в первой реализации лидарной системы 302 компонент 802 AM может быть установлен на пути выходного луча 318 FMCW, тем самым генерируя выходной луч 818 AFMCW, как описано выше со ссылкой на фиг. 8.
[000311] В соответствии с другими неограничивающими вариантами осуществления настоящей технологии, во второй реализации лидарной системы 302, компонент 802 АМ может быть установлен на пути опорного луча 322 FMCW, тем самым генерируя опорный луч 822 AFMCW, как описано со ссылкой на фиг. 13.
[000312] Согласно еще другим неограничивающим вариантам осуществления настоящей технологии, в третьей реализации лидарной системы 302 компонент 802 AM может быть установлен на пути сканирующего луча 320 FMCW, тем самым генерируя сканирующий луч 820 AFMCW, как описано выше со ссылкой на фиг. 16.
[000313] Наконец, согласно еще одним неограничивающим вариантам осуществления настоящей технологии, в четвертой реализации лидарной системы 302 лидарная система 302 может дополнительно содержать другой амплитудный модулятор, такой как второй компонент 1802 AM, реализованный аналогично компоненту 802 AM. Таким образом, в соответствии с четвертой реализацией лидарной системы 302, компонент 802 АМ может быть установлен на пути опорного луча 322 FMCW, таким образом, генерируя опорный луч 822 AFMCW; и второй компонент 1802 AM может быть установлен на пути сканирующего луча 320 FMCW, тем самым генерируя второй сканирующий луч 1920 AFMCW, как описано выше со ссылкой на фиг. 19.
[000314] Таким образом, способ 2400 переходит к этапу 2408.
Этап 2408: РАЗДЕЛЕНИЕ, ПОСРЕДСТВОМ ЛИДАРНОЙ СИСТЕМЫ, ОДНОГО ИЗ СИГНАЛА FMCW И СИГНАЛА AFMCW НА ПЕРВУЮ ЧАСТЬ И ВТОРУЮ ЧАСТЬ, ПРИЧЕМ ПЕРВАЯ ЧАСТЬ ДОЛЖНА ВЫВОДИТЬСЯ ЛИДАРНОЙ СИСТЕМОЙ ДЛЯ ОТРАЖЕНИЯ ОТ ОБЪЕКТА, ТЕМ САМЫМ ГЕНЕРИРУЯ ОТРАЖЕННЫЙ СИГНАЛ, А ВТОРАЯ ЧАСТЬ ДОЛЖНА ИСПОЛЬЗОВАТЬСЯ ДЛЯ УСИЛЕНИЯ ОТРАЖЕННОГО СИГНАЛА
[000315] На этапе 2408, согласно неограничивающим вариантам осуществления настоящей технологии, компонент 316 контроллера выполнен с возможностью формирования сканирующего и опорного лучей лидарной системы 302 с использованием компонента 310 светоделителя, чтобы обнаруживать объект 325 в окружении 250 и дополнительно определять его данные.
[000316] Как ранее описано со ссылкой на фиг. 3, согласно неограничивающим вариантам осуществления настоящей технологии, компонент 310 светоделителя выполнен с возможностью принимать входной световой луч и разделять его на первую часть и вторую часть меньшей интенсивности, чем интенсивность входного светового луча. Кроме того, первая часть направляется далее в сторону окружения 250, чтобы отражаться от объекта 325, тем самым генерируя отраженный луч; а вторая часть направляется в компонент 312 приемника, чтобы использоваться для усиления отраженного луча.
[000317] Таким образом, в соответствии с первой реализацией лидарной системы 302, показанной на фиг. 8, компонент 310 светоделителя может быть выполнен с возможностью приема выходного луча 818 AFMCW и формирования сканирующего луча 820 AFMCW и опорного луча 822 AFMCW. Кроме того, отражаясь от объекта 325, сканирующий луч 820 AFMCW создает входной луч 824 AFMCW.
[000318] Согласно второй реализации лидарной системы 302, изображенной на фиг. 13, компонент 310 светоделителя может быть выполнен с возможностью приема выходного луча 318 FMCW и формирования сканирующего луча 320 FMCW и опорного луча 322 FMCW. Кроме того, компонент 310 светоделителя может быть выполнен с возможностью направления опорного луча 322 FMCW к компоненту 810 AM, таким образом, генерируя опорный луч 822 AFMCW. Наконец, отразившись от объекта 325, сканирующий луч 320 FMCW генерирует входной луч 324 FMCW.
[000319] Согласно третьей реализации лидарной системы 302, изображенной на фиг. 16, компонент 310 светоделителя может быть выполнен с возможностью приема выходного луча 318 FMCW и формирования сканирующего луча 320 FMCW и опорного луча 322 FMCW. Кроме того, компонент 310 светоделителя может быть выполнен с возможностью направления сканирующего луча 320 FMCW в компонент 810 AM, тем самым генерируя сканирующий луч 820 AFMCW. Наконец, отражаясь от объекта 325, сканирующий луч 820 AFMCW генерирует входной луч 824 AFMCW.
[000320] Наконец, в соответствии с четвертой реализацией лидарной системы 302, показанной на фиг. 19, компонент 310 светоделителя может быть выполнен с возможностью приема выходного луча 318 FMCW и формирования сканирующего луча 320 FMCW и опорного луча 322 FMCW. Кроме того, компонент 310 светоделителя может быть выполнен с возможностью направлять опорный луч 322 FMCW к компоненту 810 AM, тем самым генерируя опорный луч 822 AFMCW; и направлять сканирующий луч 320 FMCW во второй компонент 1802 AM, тем самым генерируя второй сканирующий луч 1920 AFMCW. Наконец, отразившись от объекта 325, второй сканирующий луч 1920 AFMCW создает второй входной луч 1924 AFMCW.
[000321] Таким образом, способ переходит к этапу 2410.
Этап 2410: УСИЛЕНИЕ, ПОСРЕДСТВОМ ЛИДАРНОЙ СИСТЕМЫ, ОТРАЖЕННОГО СИГНАЛА НА ОСНОВЕ ВТОРОЙ ЧАСТИ ПОСРЕДСТВОМ УВЕЛИЧЕНИЯ УСИЛЕНИЯ ОТРАЖЕННОГО СИГНАЛА В ЗАВИСИМОСТИ ОТ РАССТОЯНИЯ ДО ОБЪЕКТА ОТ ЛИДАРНОЙ СИСТЕМЫ, ТЕМ САМЫМ ГЕНЕРИРУЯ УСИЛЕННЫЙ ОТРАЖЕННЫЙ СИГНАЛ, И УСИЛЕННЫЙ ОТРАЖЕННЫЙ СИГНАЛ УКАЗЫВАЕТ НА РАССТОЯНИЕ ДО ОБЪЕКТА ОТ ЛИДАРНОЙ СИСТЕМЫ
[000322] На этапе 2410, согласно неограничивающим вариантам осуществления настоящей технологии, компонент 316 контроллера выполнен с возможностью предписывать компоненту 312 приемника принимать входящие световые лучи; и компонент 312 приемника может дополнительно быть выполнен с возможностью формирования соответствующих электрических сигналов.
[000323] Таким образом, в соответствии с первой реализацией лидарной системы 302, показанной на фиг. 8, компонент 312 приемника может быть выполнен с возможностью (1) принимать опорный луч 822 AFMCW и входной луч 824 AFMCW; (2) формировать опорный электрический сигнал AFMCW и входной электрический сигнал AFMCW, соответственно; (3) формировать их смесь, например, в соответствии с уравнением (5), тем самым усиливая входной электрический сигнал AFMCW и генерируя первый усиленный входной электрический сигнал 826 AFMCW; (4) передать первый усиленный входной электрический сигнал AFMCW 826 в компонент 316 контроллера для дальнейшего анализа.
[000324] Кроме того, в соответствии со второй реализацией лидарной системы 302, изображенной на фиг. 13, компонент 312 приемника может быть выполнен с возможностью (1) принимать опорный луч 822 AFMCW и входной луч 324 FMCW; (2) формировать опорный электрический сигнал AFMCW и входной электрический сигнал FMCW, соответственно; (3) формировать их смесь, например, в соответствии с уравнением (5), тем самым усиливая входной электрический сигнал FMCW и генерируя второй усиленный входной электрический сигнал 1326 AFMCW; (4) передать второй усиленный входной электрический сигнал 1326 AFMCW в компонент 316 контроллера для дальнейшего анализа.
[000325] Кроме того, в соответствии с третьей реализацией лидарной системы 302, изображенной на фиг. 16, компонент 312 приемника может быть выполнен с возможностью (1) принимать опорный луч 322 FMCW и входной луч 824 AFMCW; (2) формировать опорный электрический сигнал FMCW и входной электрический сигнал AFMCW, соответственно; (3) формировать их смесь, например, в соответствии с уравнением (5), тем самым усиливая входной электрический сигнал AFMCW и генерируя третий усиленный входной электрический сигнал 1626 AFMCW; (4) передать третий усиленный входной электрический сигнал 1626 AFMCW в компонент 316 контроллера для дальнейшего анализа.
[000326] Наконец, в соответствии с четвертой реализацией лидарной системы 302, показанной на фиг. 19, компонент 312 приемника может быть выполнен с возможностью (1) принимать опорный луч 822 AFMCW и второй входной луч 1924 AFMCW; (2) формировать опорный электрический сигнал AFMCW и второй входной электрический сигнал AFMCW, соответственно; (3) формировать их смесь, например, в соответствии с уравнением (5), тем самым усиливая второй входной электрический сигнал AFMCW и генерируя четвертый усиленный входной электрический сигнал 1926 AFMCW; (4) передать четвертый усиленный входной электрический сигнал 1926 AFMCW в компонент 316 контроллера для дальнейшего анализа.
[000327] Соответственно, в неограничивающих вариантах осуществления настоящей технологии каждый из первого усиленного входного электрического сигнала 826 AFMCW, второго усиленного входного электрического сигнала 1326 AFMCW, третьего усиленного входного электрического сигнала 1626 AFMCW и четвертого усиленного входного электрического сигнала AFMCW 1926 был сформирован для коррекции падения амплитуды (затухания) соответствующего входного электрического сигнала путем его усиления в зависимости от расстояния от лидарной системы 302 до одного или нескольких объектов в окружении 250 транспортного средства 220.
[000328] Как упоминалось ранее, согласно некоторым неограничивающим вариантам осуществления настоящей технологии компонент 312 приемника может быть связан с предварительно заданным пороговым значением амплитуды, указывающим максимальную амплитуду составленного таким образом электрического сигнала (которая может быть определена в соответствии с уравнением (6), например), который может быть сформирован компонентом 312 приемника без его повреждения. Другими словами, соответствующие максимальные значения амплитуды первого усиленного входного электрического сигнала 826 AFMCW, второго усиленного входного электрического сигнала 1326 AFMCW, третьего усиленного входного электрического сигнала 1626 AFMCW и четвертого усиленного входного электрического сигнала 1926 AFMCW должны удовлетворять выраженному условию по уравнению (7). С этой целью некоторые параметры компонента 802 AM и второго компонента 1802 AM могут быть отрегулированы, например, используемая функция амплитудной модуляции (такая как линейная периодическая функция 900 или асимптотическая периодическая функция 1000), определенные параметры используемой функции амплитудной модуляции (такой как второе значение 906 амплитуды), используемый способ модуляции и т.п.
[000329] Кроме того, согласно неограничивающим вариантам осуществления настоящей технологии, приняв соответствующий один из первого усиленного входного электрического сигнала 826 AFMCW, второго усиленного входного электрического сигнала 1326 AFMCW, третьего усиленного входного электрического сигнала 1626 AFMCW и четвертого усиленного входного электрического сигнала 1926 AFMCW, компонент 316 контроллера может быть выполнен с возможностью его анализа и определения данных объекта 325. Например, на основе разницы 1108 во времени компонент 316 контроллера может быть выполнен с возможностью определения расстояния 390 до объекта 325, как описано ниже со ссылкой на фиг. 11 и 12, 14 и 15, 17 и 18 и 20-23 (соответственно связаны с первой, второй, третьей и четвертой реализациями лидарной системы 302). Кроме того, как описано здесь выше со ссылкой на фиг. 7, используя соответствующий усиленный входной электрический сигнал AFMCW и связанный опорный электрический сигнал, компонент контроллера 316 может быть выполнен с возможностью дополнительного определения мгновенной скорости 327 объекта 325 относительно лидарной системы 302.
[000330] Наконец, согласно неограничивающим вариантам осуществления настоящей технологии, определенные таким образом данные объекта 325 могут, таким образом, использоваться компонентом 316 контроллера для управления транспортным средством 220. Например, учитывая расстояние 390 и мгновенную скорость 327 объекта 325, компонент 316 контроллера может быть выполнен с возможностью определения будущей траектории для транспортного средства 220.
[000331] Таким образом, некоторые неограничивающие варианты осуществления лидарной системы 302 позволяют компенсировать ослабление входящего светового луча на основе CW (например, входного луча 324 FMCW, входного луча 824 AFMCW и т.п.), вызванное большим расстоянием прохождения. Затухание компенсируется за счет усиления входного светового луча на основе CW с использованием опорного светового луча, сформированного на его основании, и, кроме того, амплитудно-модулированного на основе порогового расстояния определения дальности, связанного с лидарной системой 302. Следовательно, такой подход позволяет усиливать входящий световой луч на основе CW в зависимости от расстояния до объектов, расположенных в окружении 250 транспортного средства 220, что может быть нацелено на более оптимальное потребление энергии лидарной системой 302 и может дополнительно быть связанным с повышенными стандартами безопасности для глаз. Кроме того, этот подход может позволить регулировать параметры усиления (например, параметры компонента 802 AM) независимо для более безопасной работы лидарной системы 302 с точки зрения максимальной входной мощности ее компонентов (например, входной мощности компонента 312 приемника).
[000332] Соответственно, эти неограничивающие варианты осуществления лидарной системы 302 позволяют регистрировать более надежные данные одного или нескольких объектов в окружении 250, расположенных на больших расстояниях от лидарной системы 302, тем самым обеспечивая, например, (1) формирование более точной многомерной карты объектов; и (2) более эффективную операцию управления (например, планирование траектории) для транспортного средства 220, например, с точки зрения предотвращения столкновений с объектами в окружении 250.
[000333] Таким образом, способ 2400 завершается.
[000334] Модификации и улучшения вышеописанных реализаций настоящей технологии могут стать очевидными для специалистов в данной области техники. Предшествующее описание предназначено для того, чтобы быть примерным, а не ограничивающим. Поэтому подразумевается, что объем настоящей технологии ограничен только объемом прилагаемой формулы изобретения.
[000335] Хотя вышеописанные реализации были описаны и показаны со ссылкой на конкретные этапы, выполняемые в конкретном порядке, следует понимать, что эти этапы могут быть объединены, подразделены или переупорядочены без отклонения от идей настоящей технологии. Соответственно, порядок и группировка упомянутых этапов ограничениями настоящей технологии не являются.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНЕР ДЛЯ ЛИДАРНОЙ СИСТЕМЫ, ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ИСПОЛЬЗОВАНИЕМ СКАНЕРА | 2020 |
|
RU2781619C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2789827C2 |
| Лидарные системы и способы | 2020 |
|
RU2798363C2 |
| Лидарные системы и способы | 2020 |
|
RU2798364C2 |
| Лидарная система и способ с когерентным детектированием | 2020 |
|
RU2792949C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ВЫБОРОЧНЫМ СКАНИРОВАНИЕМ | 2020 |
|
RU2792951C2 |
| ЛИДАРНЫЕ (LIDAR) СПОСОБЫ И СИСТЕМЫ СО СКАНИРОВАНИЕМ С ИЗБИРАТЕЛЬНОЙ ПЛОТНОСТЬЮ НА ОСНОВЕ MEMS | 2019 |
|
RU2752016C2 |
| ОПТИЧЕСКИЕ СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ ИМИ | 2020 |
|
RU2793241C2 |
| СПОСОБЫ И СИСТЕМЫ ОБНАРУЖЕНИЯ С ПОМОЩЬЮ ЛИДАРА (LiDAR) С ВОЛОКОННО-ОПТИЧЕСКОЙ МАТРИЦЕЙ | 2019 |
|
RU2762744C2 |
| ЛИДАРНАЯ СИСТЕМА И СПОСОБ КАЛИБРОВКИ ЛИДАРНОЙ СИСТЕМЫ | 2021 |
|
RU2829088C1 |

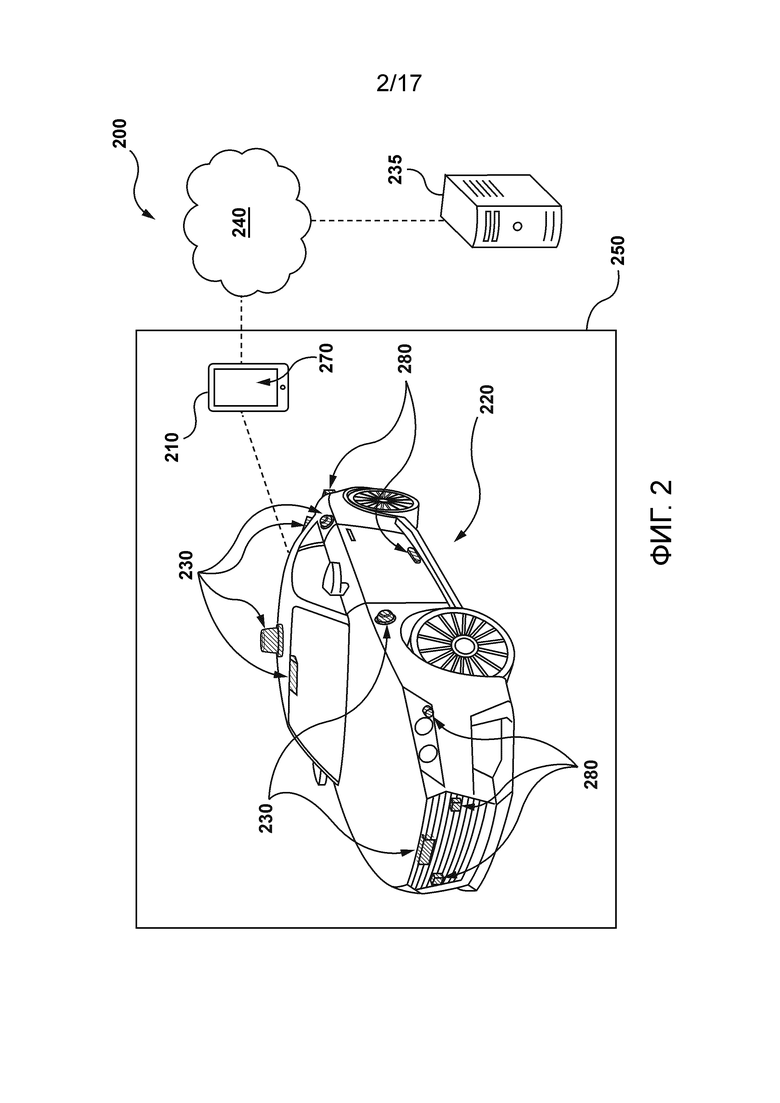
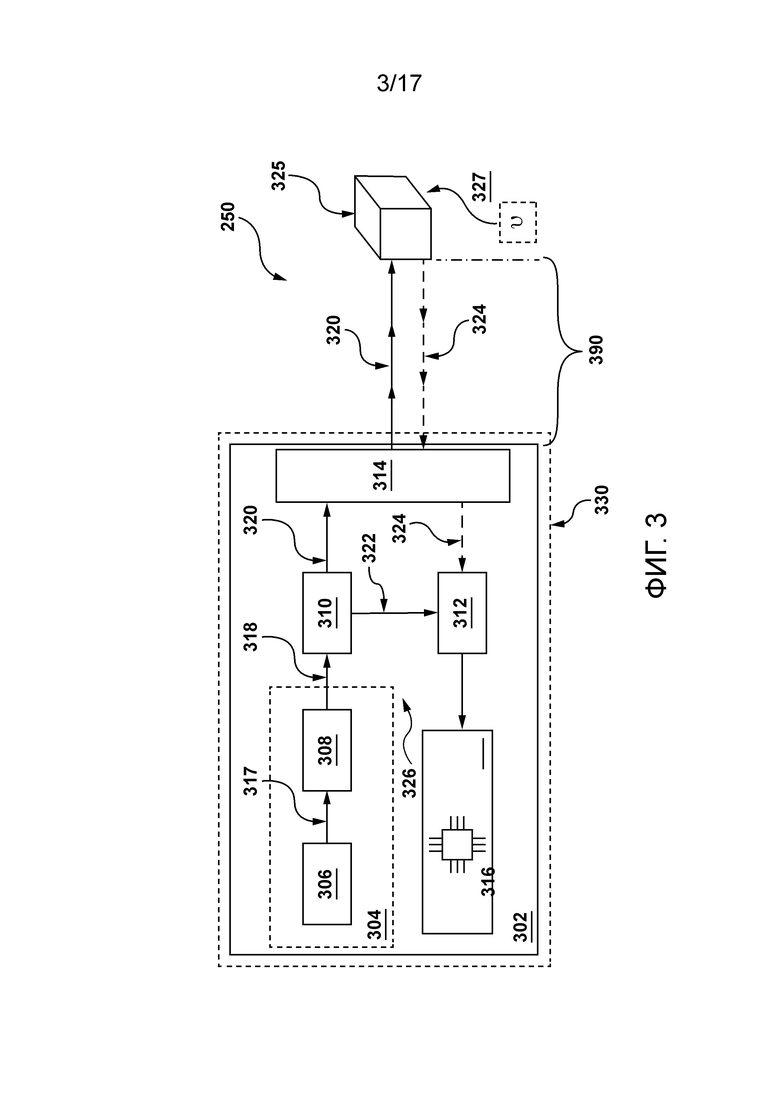
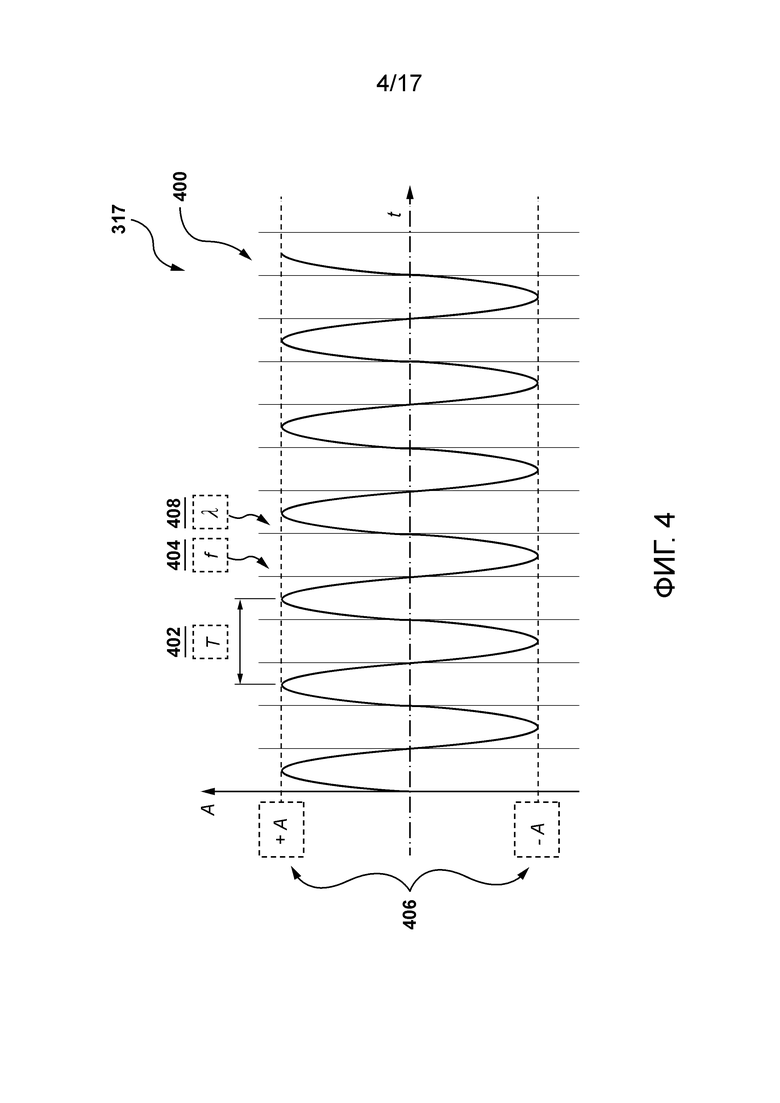
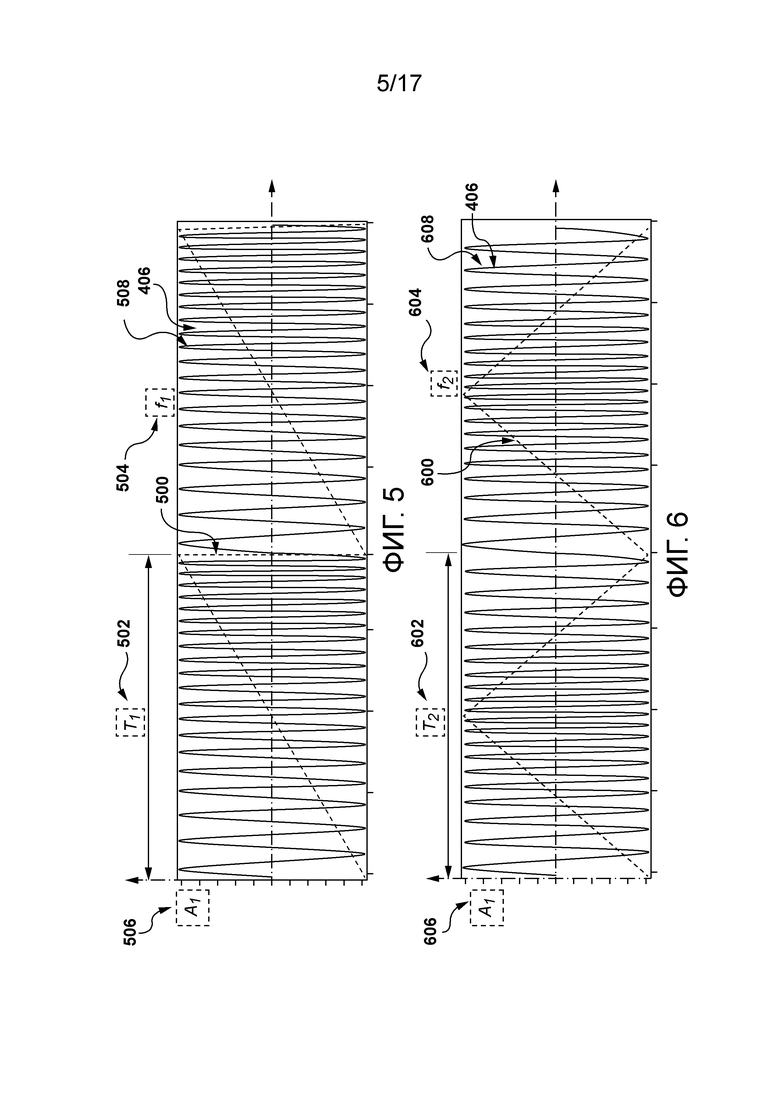
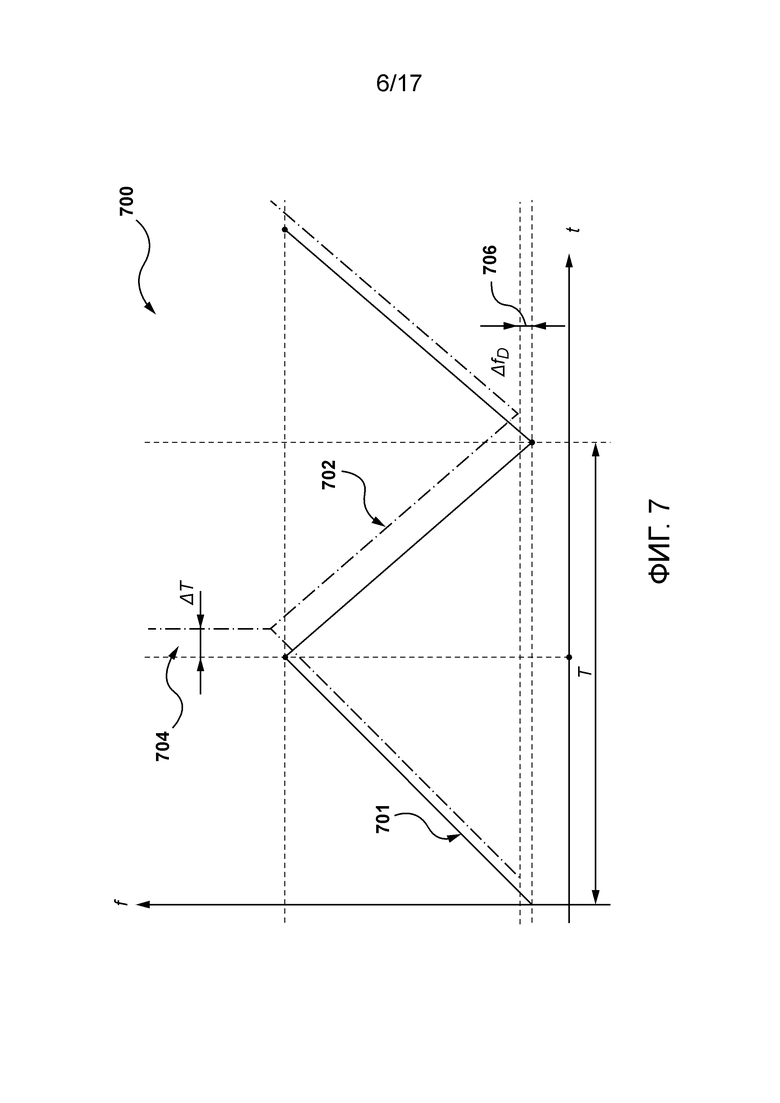
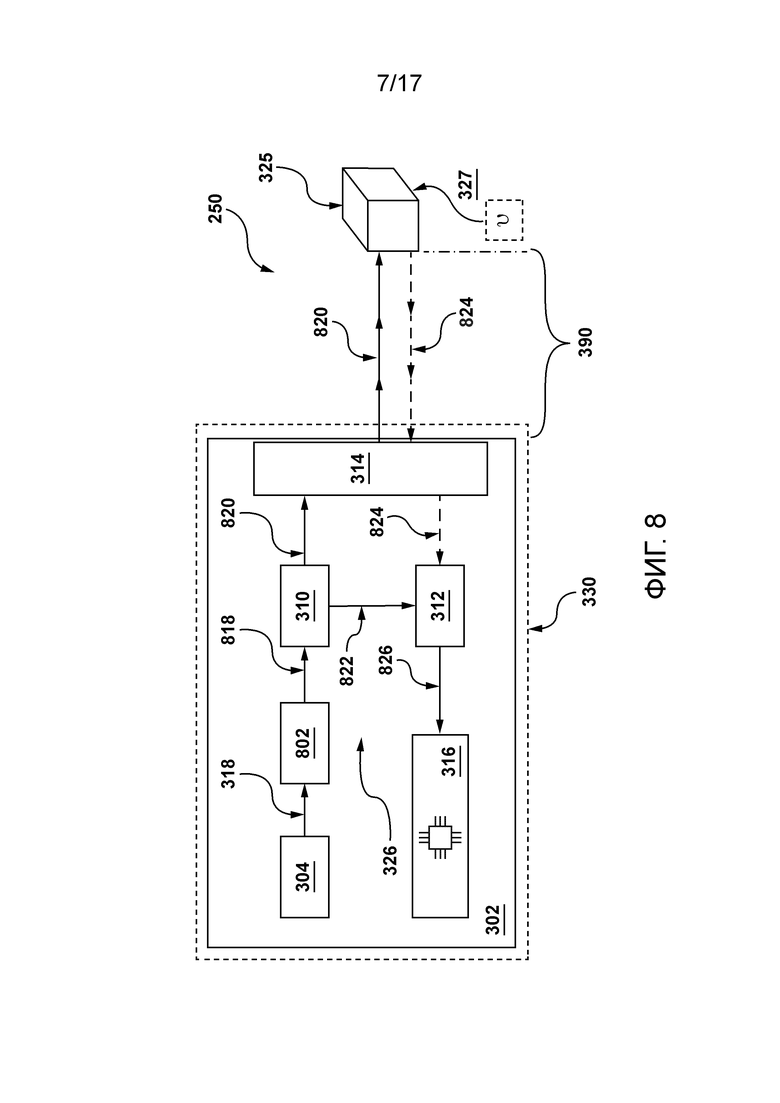

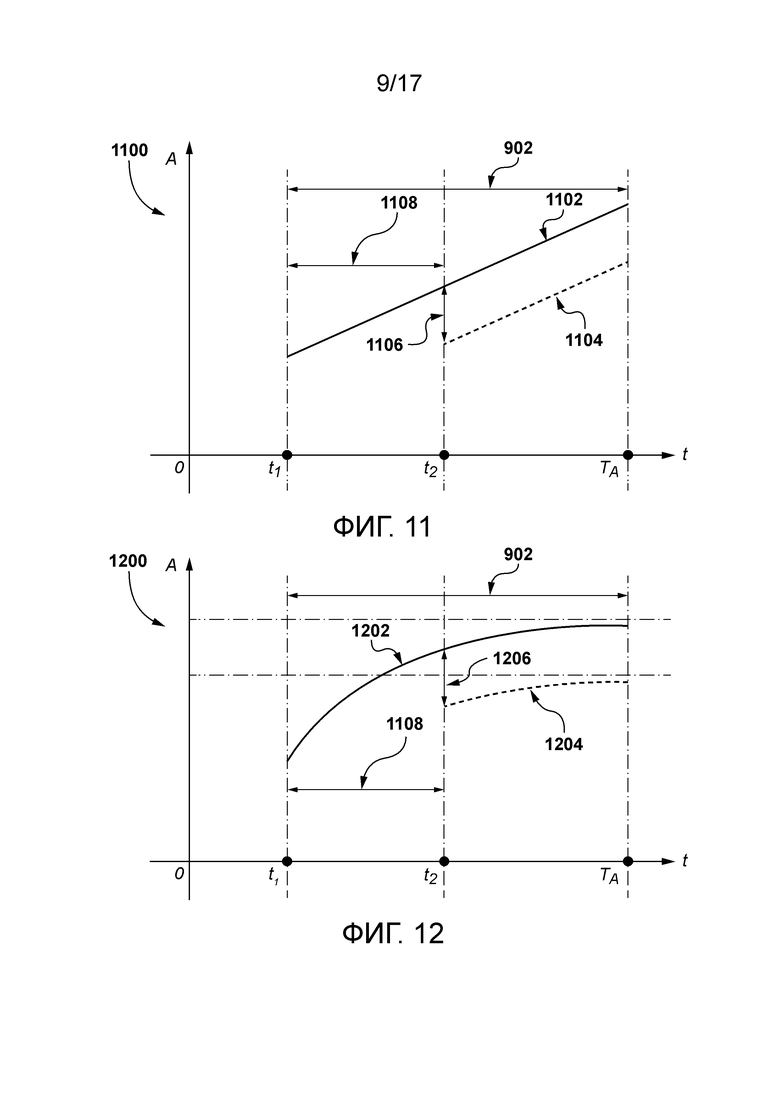
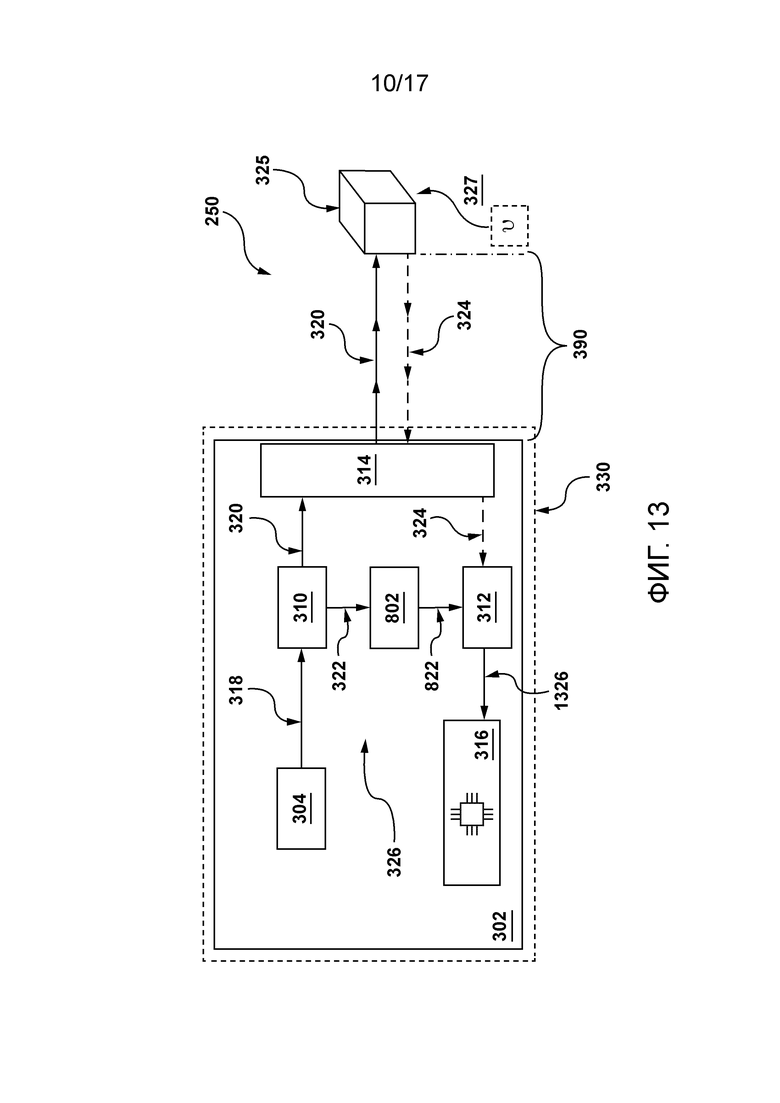
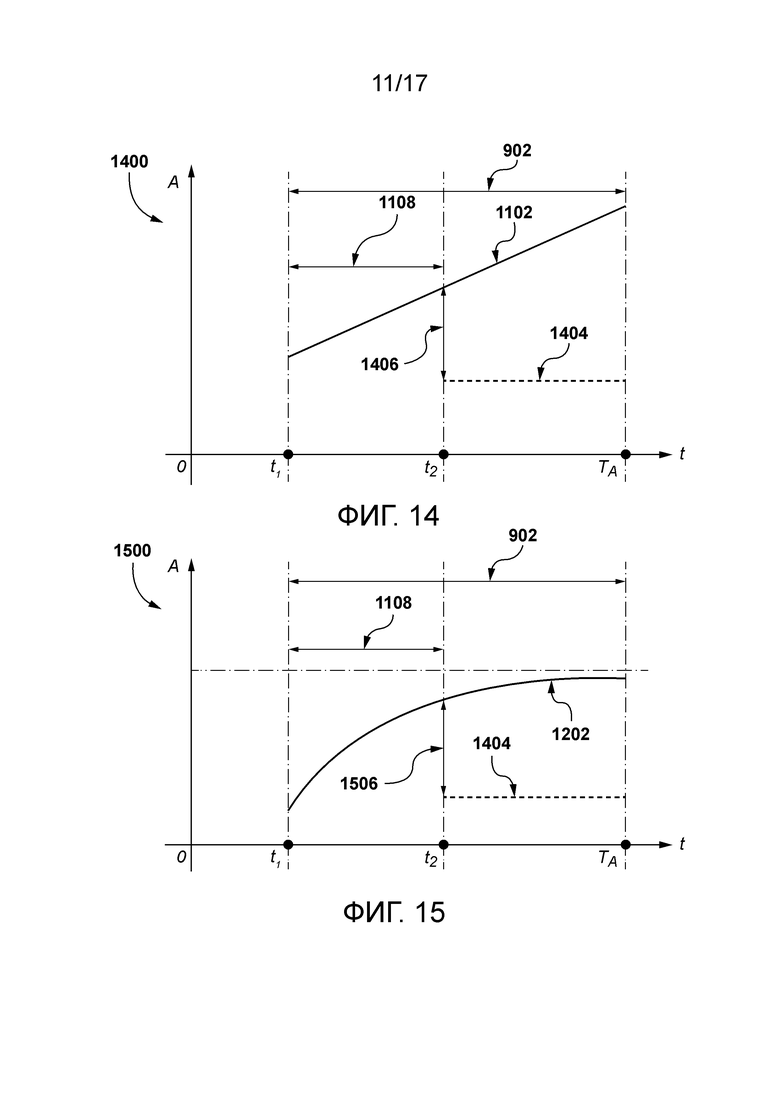
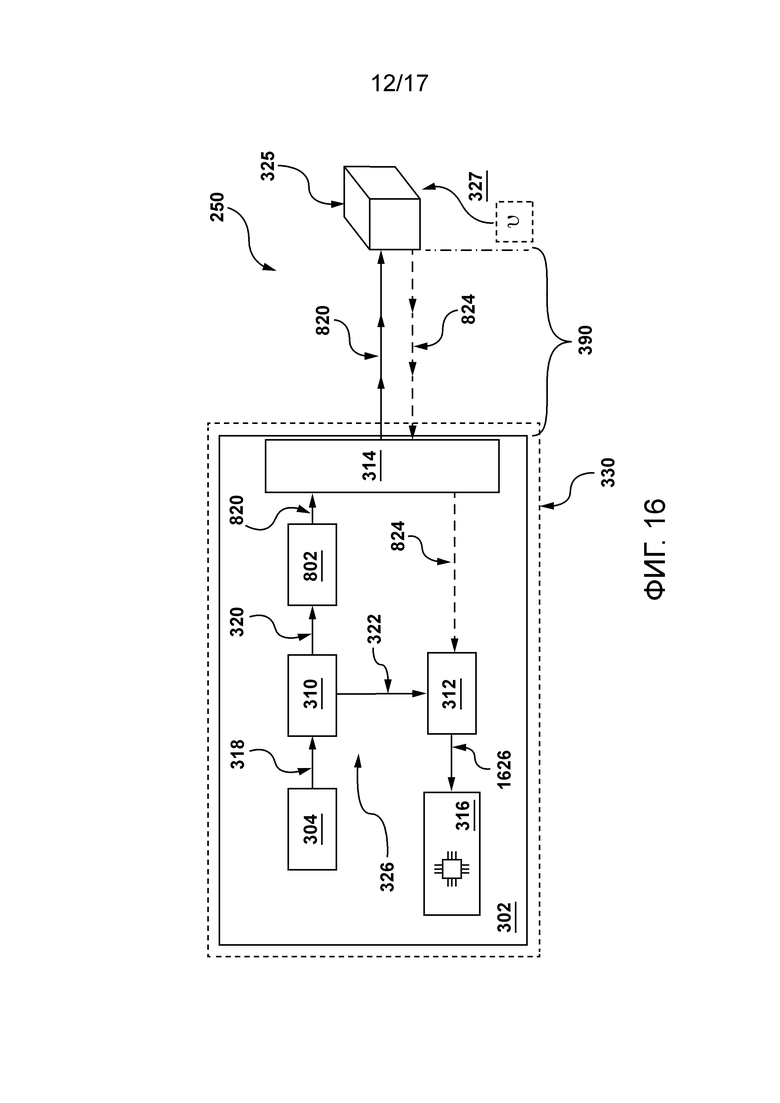
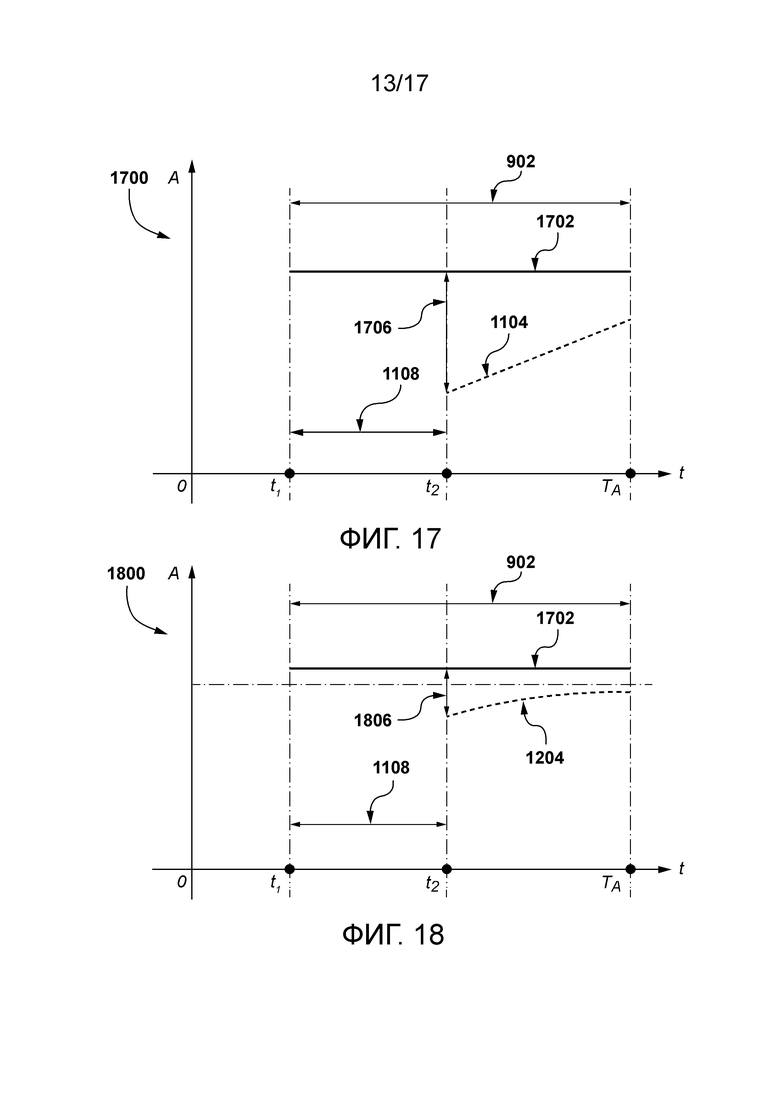
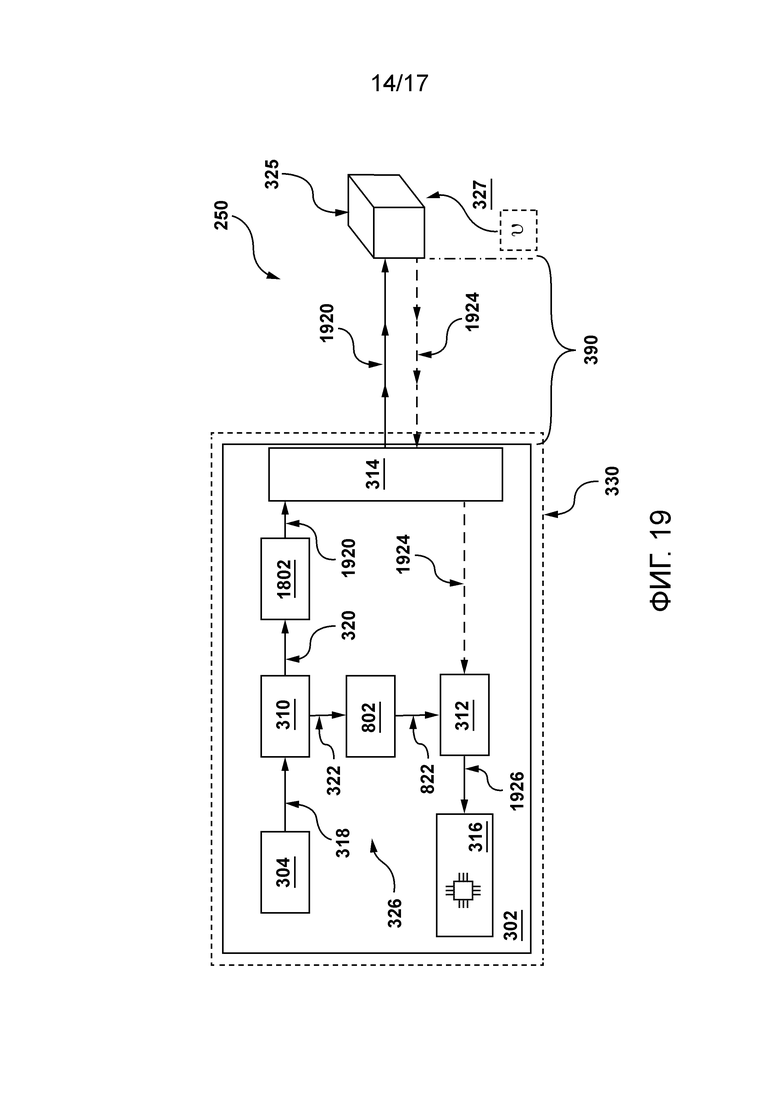
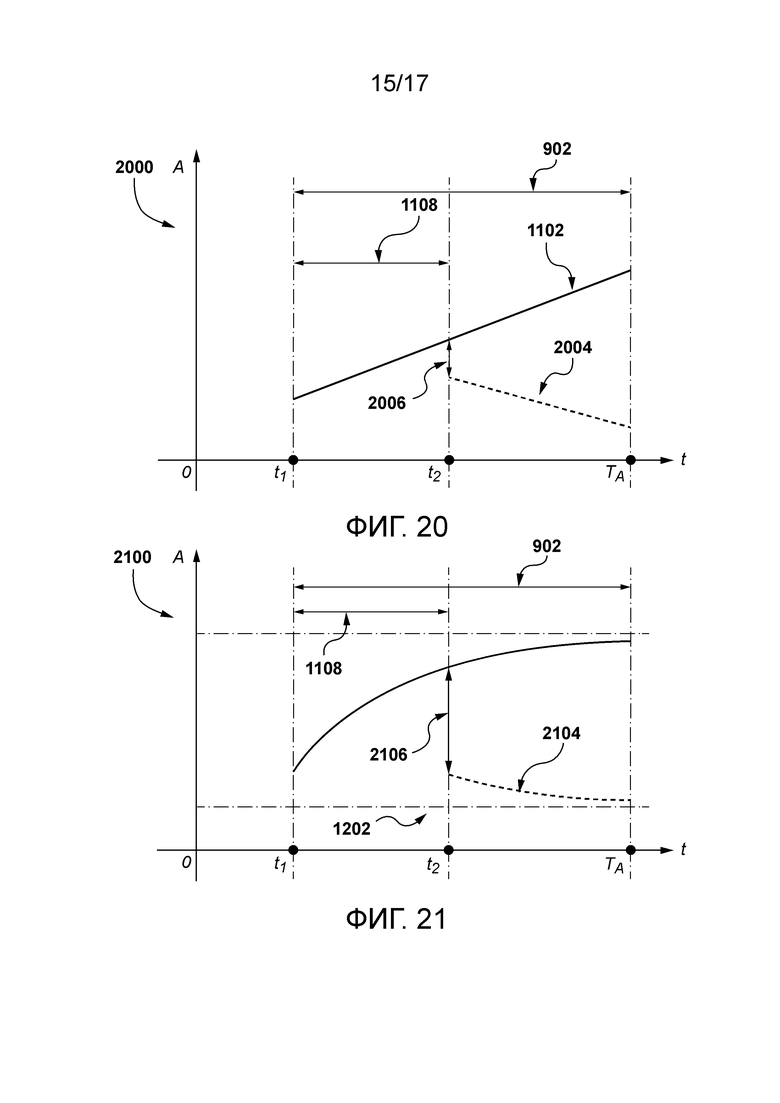
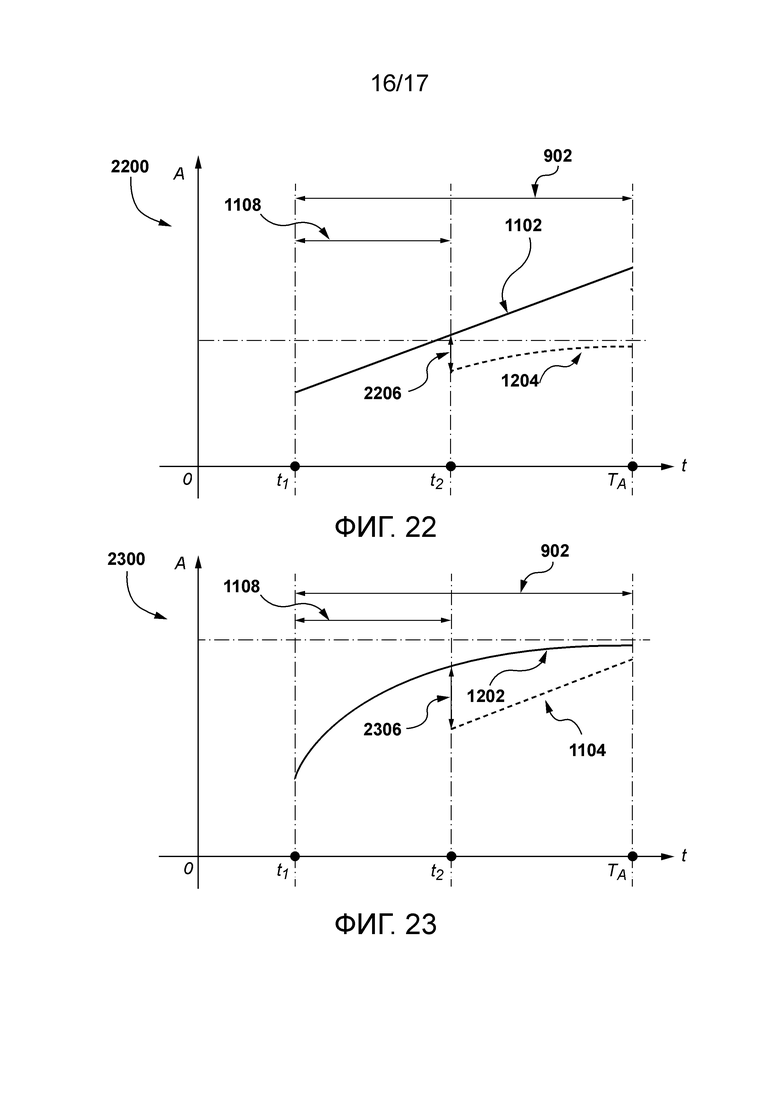
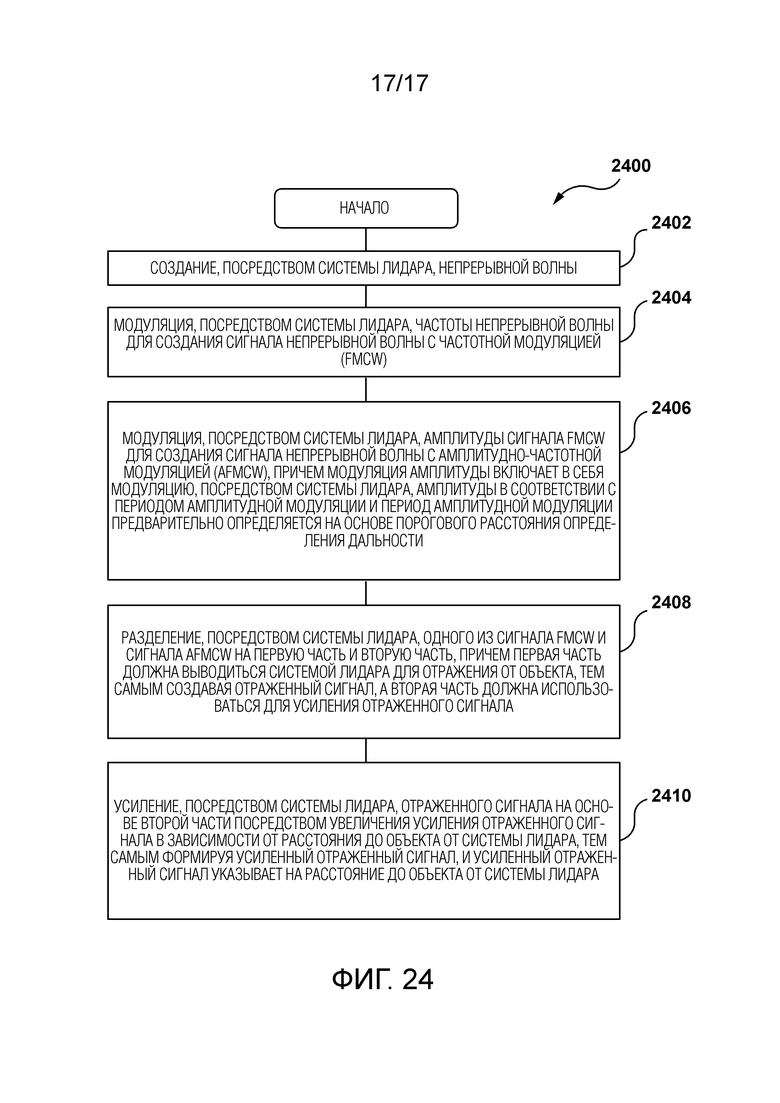
Использование: настоящая технология относится к системам обнаружения и определения дальности с помощью света (LiDAR, лидар) и способам обнаружения объектов в целом; и, в частности, к лидарным системам, основанным на источниках света с непрерывным излучением с частотной модуляцией (FMCW, frequency modulated continuous wave). Сущность: лидарная система включает в себя: источник света непрерывной волны с частотной модуляцией (FMCW), выполненный с возможностью генерирования сигнала FMCW; и амплитудный модулятор, выполненный с возможностью модуляции амплитуды по меньшей мере части сигнала FMCW, тем самым генерируя сигнал непрерывного излучения с амплитудно-частотной модуляцией (AFMCW); светоделитель, выполненный с возможностью деления одного из сигнала FMCW и сигнала AFMCW на первую часть и вторую часть, первая часть является выходным сигналом для отражения от объекта, тем самым генерируя отраженный сигнал, а вторая часть является опорным сигналом для усиления отраженного сигнала; и детектор, выполненный с возможностью усиления отраженного сигнала на основе опорного сигнала в зависимости от расстояния от лидарной системы до объекта, тем самым генерируя усиленный отраженный сигнал для определения расстояния до объекта. Технический результат: улучшает точность и расстояние определения дальности лидарных систем FMCW, что дополнительно обеспечивает более безопасную работу транспортного средства. 7 н. и 25 з.п. ф-лы, 24 ил.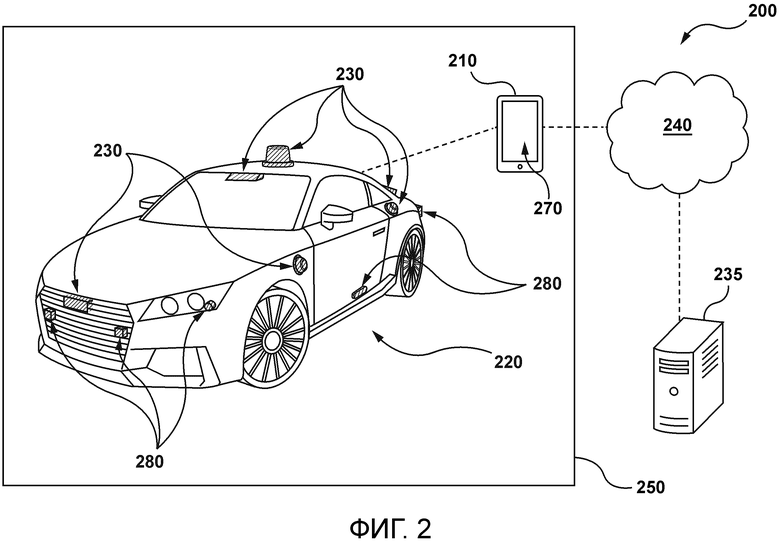
1. Лидарная система, имеющая пороговое расстояние определения дальности, причем пороговое расстояние определения дальности указывает на наибольшее расстояние, на котором лидарная система выполнена с возможностью обнаружения объекта, причем лидарная система содержит:
- источник света, выполненный с возможностью генерирования сигнала непрерывного излучения;
- частотный модулятор, выполненный с возможностью модуляции частоты непрерывной волны,
тем самым генерируя сигнал непрерывного излучения с частотной модуляцией (FMCW); и
- амплитудный модулятор, выполненный с возможностью модуляции амплитуды сигнала FMCW,
тем самым генерируя сигнал непрерывного излучения с амплитудно-частотной модуляцией (AFMCW),
причем амплитуда сигнала FMCW модулируется в соответствии с периодом амплитудной модуляции, и
период амплитудной модуляции предварительно определяется на основе порогового расстояния определения дальности;
- светоделитель, выполненный с возможностью деления сигнала AFMCW на первую часть и вторую часть,
причем первая часть может выводиться лидарной системой для отражения от объекта, тем самым генерируя отраженный сигнал, и
вторая часть может использоваться для усиления отраженного сигнала; и
- детектор, выполненный с возможностью усиления отраженного сигнала на основе второй части путем увеличения усиления отраженного сигнала в зависимости от расстояния до объекта от лидарной системы,
тем самым генерируя усиленный отраженный сигнал, и
усиленный отраженный сигнал указывает на расстояние до объекта от лидарной системы.
2. Лидарная система по п. 1, в которой детектор имеет пороговую амплитуду, а усиленный отраженный сигнал имеет амплитуду, которая ниже пороговой амплитуды.
3. Лидарная система по п. 2, в которой амплитудный модулятор выполнен с возможностью модулировать амплитуду сигнала FMCW в соответствии с периодической функцией амплитудной модуляции, причем периодическая функция амплитудной модуляции выбирается оператором таким образом, что амплитуда усиленного отраженного сигнала ниже пороговой амплитуды детектора.
4. Лидарная система по п. 3, в которой детектор дополнительно выполнен с возможностью приема отраженного сигнала.
5. Лидарная система по п. 3, в которой:
светоделитель выполнен с возможностью деления сигнала AFMCW; и
детектор дополнительно выполнен с возможностью приема второй части сигнала AFMCW для усиления отраженного сигнала.
6. Лидарная система по п. 3, в которой:
светоделитель выполнен с возможностью деления сигнала FMCW;
амплитудный модулятор дополнительно выполнен с возможностью приема второй части сигнала FMCW;
амплитудный модулятор, выполненный с возможностью модуляции амплитуды сигнала FMCW, содержит амплитудный модулятор, выполненный с возможностью модуляции амплитуды второй части сигнала FMCW; и
детектор дополнительно выполнен с возможностью приема сигнала AFMCW от амплитудного модулятора для усиления отраженного сигнала.
7. Лидарная система по п. 3, в которой амплитудный модулятор, выполненный с возможностью модуляции амплитуды сигнала FMCW, содержит амплитудный модулятор, выполненный с возможностью:
создавать сигнал AFMCW, имеющий непрерывно увеличивающуюся амплитуду в пределах периода амплитудной модуляции.
8. Лидарная система по п. 3, в которой амплитудный модулятор, выполненный с возможностью модуляции амплитуды сигнала FMCW, содержит амплитудный модулятор, выполненный с возможностью:
создавать сигнал AFMCW, имеющий асимптотически возрастающую амплитуду в пределах периода амплитудной модуляции.
9. Лидарная система по п. 3, в которой амплитудный модулятор, выполненный с возможностью модуляции амплитуды сигнала FMCW, содержит амплитудный модулятор, выполненный с возможностью:
создавать сигнал AFMCW, имеющий линейно возрастающую амплитуду в пределах периода амплитудной модуляции.
10. Лидарная система по п. 3, в которой:
частота непрерывной волны модулируется в соответствии с периодом частотной модуляции; и
период частотной модуляции равен периоду амплитудной модуляции.
11. Лидарная система по п. 3, в которой период амплитудной модуляции предварительно определяется как значение времени, соответствующее количеству времени между:
(i) первым моментом времени, когда вторая часть выводится из лидарной системы; и
(ii) вторым моментом времени, когда отраженный сигнал будет принят детектором, если объект находится на пороговом расстоянии определения дальности от лидарной системы.
12. Лидарная система по п. 3, в которой частотный модулятор выполнен заодно с источником света.
13. Лидарная система по п. 3, в которой амплитудный модулятор выполнен единым с источником света.
14. Лидарная система по п. 3, в которой амплитудный модулятор представляет собой по меньшей мере одно из:
- регулируемый оптический модулятор MEMS;
- электрооптический модулятор;
- магнитооптический модулятор;
- волоконно-оптический усилитель;
- полупроводниковый оптический усилитель; и
- другой источник света.
15. Лидарная система по п. 3, причем лидарной системой укомплектован беспилотный автомобиль (SDC).
16. Лидарная система по п. 3, в которой усиленный отраженный сигнал дополнительно указывает скорость объекта относительно лидарной системы.
17. Лидарная система по п. 16, в которой расстояние до объекта используется для управления работой SDC.
18. Лидарная система, имеющая пороговое расстояние определения дальности, причем пороговое расстояние определения дальности указывает на наибольшее расстояние, на котором лидарная система выполнена с возможностью обнаружения объекта, причем лидарная система содержит:
- источник света, выполненный с возможностью генерирования непрерывной волны;
- частотный модулятор, выполненный с возможностью модуляции частоты непрерывной волны,
тем самым генерируя сигнал непрерывного излучения с частотной модуляцией (FMCW); и
- светоделитель, выполненный с возможностью деления сигнала FMCW на первую часть и вторую часть,
причем первая часть может выводиться лидарной системой для отражения от объекта, тем самым генерируя отраженный сигнал, и
вторая часть может использоваться для усиления отраженного сигнала;
- амплитудный модулятор, выполненный с возможностью модуляции амплитуды второй части сигнала FMCW,
тем самым генерируя сигнал непрерывного излучения с амплитудно-частотной модуляцией (AFMCW),
причем амплитуда второй части сигнала FMCW модулируется в соответствии с периодом амплитудной модуляции, и
период амплитудной модуляции предварительно определяется на основе порогового расстояния определения дальности; и
- детектор, выполненный с возможностью усиления отраженного сигнала на основе сигнала AFMCW путем увеличения усиления отраженного сигнала в зависимости от расстояния до объекта от лидарной системы,
тем самым генерируя усиленный отраженный сигнал, и
усиленный отраженный сигнал указывает на расстояние до объекта от лидарной системы.
19. Лидарная система, имеющая пороговое расстояние определения дальности, причем пороговое расстояние определения дальности указывает на наибольшее расстояние, на котором лидарная система выполнена с возможностью обнаружения объекта, причем лидарная система содержит:
- источник света, выполненный с возможностью генерирования непрерывной волны;
- частотный модулятор, выполненный с возможностью модуляции частоты непрерывной волны,
тем самым генерируя сигнал непрерывного излучения с частотной модуляцией (FMCW); и
- светоделитель, выполненный с возможностью деления сигнала FMCW на первую часть и вторую часть,
причем вторая часть может использоваться для усиления отраженного сигнала;
- амплитудный модулятор, выполненный с возможностью модуляции амплитуды первой части сигнала FMCW,
тем самым генерируя сигнал непрерывного излучения с амплитудно-частотной модуляцией (AFMCW),
причем амплитуда первой части сигнала FMCW модулируется в соответствии с периодом амплитудной модуляции, и
период амплитудной модуляции предварительно определяется на основе порогового расстояния определения дальности,
сигнал AFMCW может выводиться лидарной системой для отражения от объекта,
тем самым генерируя отраженный сигнал; и
- детектор, выполненный с возможностью усиления отраженного сигнала на основе второй части путем увеличения усиления отраженного сигнала в зависимости от расстояния до объекта от лидарной системы,
тем самым генерируя усиленный отраженный сигнал, и
усиленный отраженный сигнал указывает на расстояние до объекта от лидарной системы.
20. Лидарная система, имеющая пороговое расстояние определения дальности, причем пороговое расстояние определения дальности указывает на наибольшее расстояние, на котором лидарная система выполнена с возможностью обнаружения объекта, причем лидарная система содержит:
- источник света, выполненный с возможностью генерирования непрерывной волны;
- частотный модулятор, выполненный с возможностью модуляции частоты непрерывной волны,
тем самым генерируя сигнал непрерывного излучения с частотной модуляцией (FMCW); и
- светоделитель, выполненный с возможностью деления сигнала FMCW на первую часть и вторую часть;
- первый амплитудный модулятор, выполненный с возможностью модуляции амплитуды первой части сигнала FMCW,
тем самым генерируя первый сигнал непрерывного излучения с амплитудно-частотной модуляцией (AFMCW),
причем амплитуда первой части сигнала FMCW модулируется в соответствии с периодом амплитудной модуляции, и
период амплитудной модуляции предварительно определяется на основе порогового расстояния определения дальности,
первый сигнал AFMCW может выводиться лидарной системой для отражения от объекта,
тем самым генерируя отраженный сигнал; и
- второй амплитудный модулятор, выполненный с возможностью модуляции амплитуды второй части сигнала FMCW,
тем самым генерируя второй сигнал AFMCW,
причем амплитуда второй части сигнала FMCW модулируется в соответствии с периодом амплитудной модуляции, и
период амплитудной модуляции предварительно определяется на основе порогового расстояния определения дальности,
второй сигнал AFMCW может использоваться для усиления отраженного сигнала;
- детектор, выполненный с возможностью усиления отраженного сигнала на основе второго сигнала AFMCW путем увеличения усиления отраженного сигнала в зависимости от расстояния до объекта от лидарной системы,
тем самым генерируя усиленный отраженный сигнал, и
усиленный отраженный сигнал указывает на расстояние до объекта от лидарной системы.
21. Лидарная система, имеющая пороговое расстояние определения дальности, причем пороговое расстояние определения дальности указывает на наибольшее расстояние, на котором лидарная система выполнена с возможностью обнаружения объекта, причем лидарная система содержит:
- источник света, выполненный с возможностью генерирования непрерывной волны;
- частотный модулятор, выполненный с возможностью модуляции частоты непрерывной волны,
тем самым генерируя сигнал непрерывного излучения с частотной модуляцией (FMCW); и
- амплитудный модулятор, выполненный с возможностью модуляции амплитуды сигнала FMCW,
тем самым генерируя сигнал непрерывного излучения с амплитудно-частотной модуляцией (AFMCW),
причем амплитуда сигнала FMCW модулируется в соответствии с периодом амплитудной модуляции, и
период амплитудной модуляции предварительно определяется на основе порогового расстояния определения дальности;
- светоделитель, выполненный с возможностью деления одного из сигнала FMCW и сигнала AFMCW на первую часть и вторую часть,
причем первая часть может выводиться лидарной системой для отражения от объекта, тем самым генерируя отраженный сигнал, и
вторая часть может использоваться для усиления отраженного сигнала; и
- детектор, выполненный с возможностью усиления отраженного сигнала на основе второй части путем увеличения усиления отраженного сигнала пропорционально расстоянию до объекта от лидарной системы,
тем самым генерируя усиленный отраженный сигнал, и
усиленный отраженный сигнал указывает на расстояние до объекта от лидарной системы.
22. Лидарная система, имеющая пороговое расстояние определения дальности, причем пороговое расстояние определения дальности указывает на наибольшее расстояние, на котором лидарная система выполнена с возможностью обнаружения объекта, причем лидарная система содержит:
- источник света, выполненный с возможностью генерирования непрерывной волны;
- частотный модулятор, выполненный с возможностью модуляции частоты непрерывной волны,
тем самым генерируя сигнал непрерывного излучения с частотной модуляцией (FMCW); и
- амплитудный модулятор, выполненный с возможностью модуляции амплитуды по меньшей мере части сигнала FMCW,
тем самым генерируя сигнал непрерывного излучения с амплитудно-частотной модуляцией (AFMCW),
причем амплитуда по меньшей мере части сигнала FMCW модулируется в соответствии с периодом амплитудной модуляции, и
период амплитудной модуляции предварительно определяется на основе порогового расстояния определения дальности;
- светоделитель, выполненный с возможностью деления одного из сигнала FMCW и сигнала AFMCW на первую часть и вторую часть,
причем первая часть предназначена для генерирования выходного сигнала лидарной системой для отражения от объекта, тем самым генерируя отраженный сигнал, и
причем вторая часть предназначена для генерирования опорного сигнала для усиления отраженного сигнала; и
- детектор, выполненный с возможностью усиления отраженного сигнала на основе опорного сигнала путем увеличения усиления отраженного сигнала в зависимости от расстояния до объекта от лидарной системы,
тем самым генерируя усиленный отраженный сигнал, и
усиленный отраженный сигнал указывает на расстояние до объекта от лидарной системы.
23. Способ работы лидарной системы, причем лидарная система имеет пороговое расстояние определения дальности, причем пороговое расстояние определения дальности указывает на наибольшее расстояние, на котором лидарная система выполнена с возможностью обнаружения объекта, способ выполняется лидарной системой, причем способ включает в себя:
- создание, посредством лидарной системы, непрерывной волны;
- модуляцию, посредством лидарной системы, частоты непрерывной волны для генерирования сигнала непрерывной волны с частотной модуляцией (FMCW);
- модуляцию, посредством лидарной системы, амплитуды сигнала FMCW для генерирования сигнала непрерывной волны с амплитудно-частотной модуляцией (AFMCW),
причем модуляция амплитуды включает в себя модуляцию, посредством лидарной системы, амплитуды в соответствии с периодом амплитудной модуляции, и
период амплитудной модуляции предварительно определяется на основе порогового расстояния определения дальности;
- разделение, посредством лидарной системы, одного из сигнала FMCW и сигнала AFMCW на первую часть и вторую часть,
причем первая часть может выводиться лидарной системой для отражения от объекта, тем самым генерируя отраженный сигнал, и
вторая часть может использоваться для усиления отраженного сигнала; и
- усиление, посредством лидарной системы, отраженного сигнала на основе второй части путем увеличения усиления отраженного сигнала в зависимости от расстояния до объекта от лидарной системы,
тем самым генерируя усиленный отраженный сигнал, и
усиленный отраженный сигнал указывает на расстояние до объекта от лидарной системы.
24. Способ по п. 23, причем способ дополнительно включает в себя прием, посредством лидарной системы, отраженного сигнала.
25. Способ по п. 23, в котором:
лидарная система разделяет сигнал AFMCW; и
вторая часть сигнала AFMCW используется для усиления отраженного сигнала.
26. Способ по п. 23, в котором:
лидарная система разделяет сигнал FMCW; и
модуляция амплитуды сигнала FMCW включает в себя модуляцию, посредством лидарной системы, амплитуды второй части сигнала FMCW.
27. Способ по п. 23, в котором модуляция амплитуды сигнала FMCW включает в себя:
создание, посредством лидарной системы, сигнала AFMCW, имеющего непрерывно увеличивающуюся амплитуду в пределах периода амплитудной модуляции.
28. Способ по п. 23, в котором:
частота непрерывной волны модулируется в соответствии с периодом частотной модуляции; и
период частотной модуляции равен периоду амплитудной модуляции.
29. Способ по п. 23, в котором период амплитудной модуляции предварительно определяется как значение времени, соответствующее количеству времени между:
(i) первый момент времени, когда вторая часть выводится из лидарной системы; и
(ii) второй момент времени, когда отраженный сигнал будет принят детектором, если объект находится на пороговом расстоянии определения дальности от лидарной системы.
30. Способ по п. 23, в котором усиленный отраженный сигнал дополнительно указывает скорость объекта относительно лидарной системы.
31. Способ по п. 23, отличающийся тем, что лидарная система установлена в самоуправляемый автомобиль (SDC).
32. Способ по п. 31, причем способ дополнительно содержит управление работой SDC на основе расстояния до объекта.
| Центрифуга для выделения из жидкости взвешенных в ней веществ | 1928 |
|
SU13509A1 |
| СПОСОБ ОПОВЕЩЕНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2668350C9 |
| US 20200150247 A1, 14.05.2020 | |||
| US 20190310351 A1, 10.10.2019 | |||
| US 20190101628 A1, 04.04.2019. | |||

