ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ НА ПАТЕНТ
[0001] Настоящая заявка на патент испрашивает приоритет согласно совместной заявке на патент США №15/835,983 (реестровый номер 20151-2163), поданной 8 декабря 2017 года, названной “СИСТЕМЫ И СПОСОБЫ ДЛЯ УЛУЧШЕНИЕ ОБНАРУЖЕНИЯ ЭХО-СИГНАЛА В СВЕТОВОЙ СИСТЕМЕ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И ОБНАРУЖЕНИЯ” ("SYSTEMS AND METHODS FOR IMPROVING DETECTION OF A RETURN SIGNAL IN A LIGHT RANGING AND DETECTION SYSTEM"), авторы изобретения David Hall и Anand Gopalan, содержание которой полностью и во всех отношениях включено в настоящую заявку посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
A. Область техники
[0002] Настоящее раскрытие в целом относится к системам и способам для пропускания и приема света и, в частности, к улучшению безопасности систем пропускания и приема света посредством применения уникальных и идентифицируемых последовательностей световых импульсов, чтобы препятствовать подмене отраженного света, обнаруженного системой (системами).
B. Уровень техники
[0003] Световые системы обнаружения и измерения дальности, такие как система LIDAR, работают посредством передачи последовательности световых импульсов, которые отражаются от объектов. Отраженный сигнал или эхо-сигнал возвращения принимается световой системой обнаружения и измерения дальности, и на основе обнаруженного времени пролета (TOF) система определяет расстояние (дальность), на котором система расположена от объекта. Световые системы обнаружения и измерения дальности могут иметь широкий спектр применения, в том числе автономное вождение и аэрофотосъемку поверхности. Эти применения могут накладывать высокий приоритет на безопасность, точность и надежность работы. Если другая сторона намеренно или непреднамеренно искажает лазерный луч или эхо-сигнал, это может отрицательно повлиять на точность и надежность. Одной из форм нарушения может подменная атака, когда злонамеренная сторона искажает или подражает характеристикам эхо-сигнала.
[0004] В соответствии с этим необходимы системы и способы для улучшения обнаружения эхо-сигнала в световой системе обнаружения и измерения дальности, включающие в себя ослабление воздействия подменной атаки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0005] Будут сделаны ссылки на варианты осуществления изобретения, примеры которых могут быть проиллюстрированы на прилагаемых чертежах. Эти чертежи предназначены для иллюстрации, но не для ограничения. Хотя изобретение в целом описывается в контексте этих вариантов осуществления, следует понимать, что оно не предназначено для ограничения объема изобретения этими конкретными вариантами осуществления. Масштаб элементов на фигурах не соблюдается.
[0006] Фиг. 1 изображает работу световой системы обнаружения и измерения дальности в соответствии с вариантами осуществления настоящего документа.
[0007] Фиг. 2 иллюстрирует работу световой системы обнаружения и измерения дальности и многократные световые эхо-сигналы в соответствии с вариантами осуществления настоящего документа.
[0008] Фиг. ЗА изображает систему LIDAR с вращающимся зеркалом в соответствии с вариантами осуществления настоящего документа.
[0009] Фиг. 3B изображает систему LIDAR с вращающейся электроникой в структуре "ротор-вал", содержащей ротор и вал, в соответствии с вариантами осуществления настоящего документа.
[0010] Каждая из фиг. 4А, 4B и 4C изображает защищающую от подмены сигнатуру в соответствии с вариантами осуществления настоящего раскрытия.
[0011] Фиг. 5 изображает систему для ослабления воздействия подмены эхо-сигнала в световой системе обнаружения и измерения дальности в соответствии с вариантами осуществления настоящего раскрытия.
[0012] Фиг. 6А и 6B изображают блок-схемы последовательности этапов для ослабления воздействия подмены эхо-сигнала в световой системе обнаружения и измерения дальности в соответствии с вариантами осуществления настоящего раскрытия.
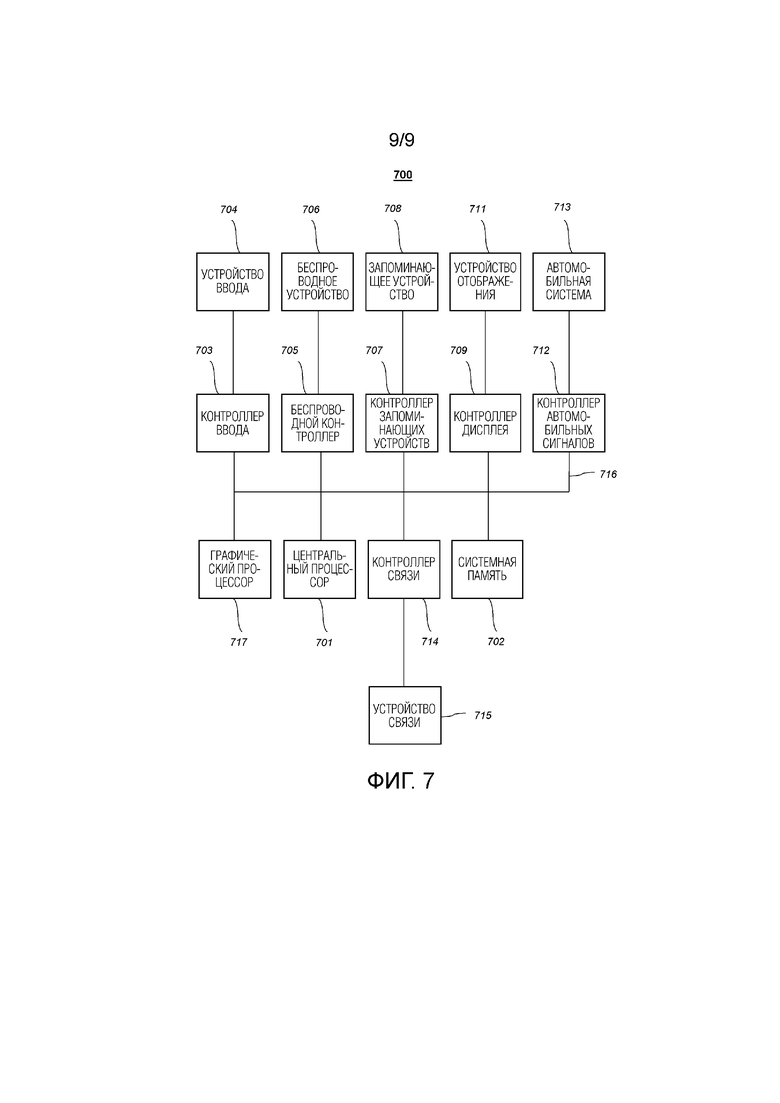
[0013] Фиг. 7 изображает упрощенную блок-схему вычислительного устройства/система обработки информации в соответствии с вариантами осуществления настоящего документа
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0014] В следующем описании в целях разъяснения сформулированы конкретные подробности, чтобы обеспечить понимание изобретения. Однако специалисту в области техники будет очевидно, что изобретение может быть осуществлено без этих подробностей. Кроме того, специалист в области техники поймет, что варианты осуществления описанного ниже настоящего изобретения могут быть реализованы различными путями, например, как процесс, устройство, система, прибор или способ на материальном машиночитаемом носителе.
[0015] Компоненты или модули, показанные на схемах, являются примерами иллюстративных вариантов осуществления изобретения, и они предназначены для того, чтобы избежать затруднения понимания изобретение. Также в ходе текущего обсуждения следует подразумевать, что компоненты могут быть описаны как отдельные функциональные блоки, которые могут содержать дочерние блоки, но специалисты в области техники признают, что различные компоненты или их части могут быть разделены на отдельные компоненты или могут быть объединены вместе, в том числе интегрированы в единую систему или компонент. Следует отметить, что функции или операции, обсуждаемые в настоящем документе, могут быть реализованы как компоненты. Компоненты могут быть реализованы в программном обеспечении, аппаратных средствах или их комбинации.
[0016] Кроме того, соединения между компонентами или системами на фигурах не подразумеваются как ограниченные прямыми соединениями. Вместо этого данные между этими компонентами могут быть модифицированы, переформатированы, или иным образом изменены посредством промежуточных компонентов. Кроме того, могут использоваться дополнительные соединения или меньше соединений. Также следует отметить, что термины "присоединен", "соединенные" или "коммуникативно присоединен" должны подразумевать охват прямых соединений, непрямых соединений через одно или более промежуточных устройств и беспроводных соединений.
[0017] Ссылка в описании на "один вариант осуществления", "предпочтительный вариант осуществления", "вариант осуществления" или "варианты осуществления" означает, что конкретный признак, структура, характеристика или функция, описанная в связи с вариантом осуществления, включены по меньшей мере в один вариант осуществления изобретения и могут присутствовать более чем в одном варианте осуществления. Кроме того, появления упомянутых выше фраз в различных местах в описании не обязательно все относятся к одному и тому же варианту осуществления или вариантам осуществления.
[0018] Использование некоторых терминов в различных местах в описании предназначено для иллюстрации и не должно быть истолковано как ограничение. Служба, функция или ресурс не ограничены единственной службой, функцией или ресурсом; использование этих терминов может относиться к группе связанных служб, функций или ресурсов, которые могут быть распределены или объединены.
[0019] Термины "включает в себя", "включающий в себя", "содержит" и "содержащий" должны быть истолкованы как открытые термины, и любые последующие списки являются примерами и не предусматривают ограничения перечисленными пунктами. Любые заголовки, используемые в настоящем документе, предназначены лишь для организационных целей и не должны использоваться для ограничения объема описания или формулы изобретения. Каждая ссылка, упомянутая в этом патентном документе, полностью включена в настоящий документ.
[0020] Кроме того, специалист в области техники должен признать, что: (1) некоторые этапы могут выполняться опционально; (2) этапы не могут быть ограничены конкретным порядком, сформулированным в настоящем документе; (3) некоторые этапы могут быть выполнены в другом порядке; и (4) некоторые этапы могут быть выполнены одновременно.
A. Световая система обнаружения и измерения дальности
[0021] Световая система обнаружения и измерения дальности, такая как система LIDAR, может представлять собой инструмент для измерения формы и контуров окружения системы. Системы LIDAR могут иметь многочисленные применения, в том числе автономную навигацию и аэрофотосъемку поверхности. Системы LIDAR излучают световой импульс, который затем отражается от объекта в окружающей обстановке, в которой работает система. Время, в течение которого каждый импульс проходит от момента его излучения до его приема может быть измерено (т.е., время пролета "TOF"), чтобы определить расстояние между объектом и системой LIDAR. Наука основана на физике света и оптике.
[0022] В системе LIDAR свет может излучаться от лазера с частым испусканием луча. Лазерный свет проходит через среду и отражается от точек предметов в окружении, таких как здания, ветви дерева и транспортные средства. Отраженная энергия света возвращается к приемнику LIDAR (детектор), где она регистрируется и используется для составления карты окружения.
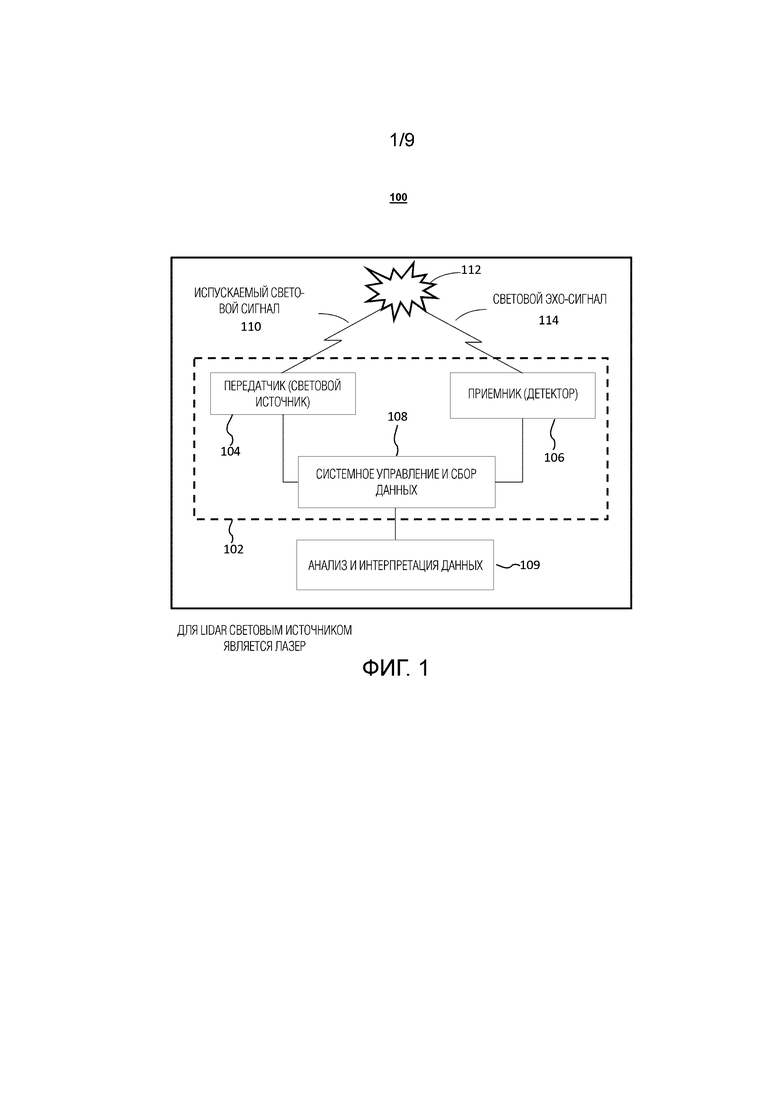
[0023] Фиг. 1 изображает операцию 100 оптических компонентов 102 обнаружения и измерения дальности и системы 109 анализа и интерпретации данных в соответствии с вариантами осуществления настоящего документа. Оптические компоненты 102 обнаружения и измерения дальности могут содержать передатчик 104, который передает излучаемый световой сигнал 110, приемник 106, содержащий детектор, и систему 108 управления и сбора данных. Излученный световой сигнал 110 распространяется через среду и отражается от объекта 112. Световой эхо-сигнал 114 распространяется через среду и принимается приемником 106. Система 108 управления и сбора данных может управлять световым излучением посредством передатчика 104, и сбор данных может регистрировать световой эхо-сигнал 114, обнаруженный приемником 106. Система 109 анализа и интерпретации данных может принять выходные данные через соединение 116 от системы 108 управления и сбора данных и выполнить функции анализа данных. Соединение 116 может быть реализовано с беспроводным или бесконтактным способом связи. Передатчик 104 и приемник 106 могут включать в себя оптическую линзу и зеркала (не показаны). Передатчик 104 может излучать лазерный луч, имеющий множество импульсов в конкретной последовательности.
В некоторых вариантах осуществления оптические компоненты 102 обнаружения и измерения дальности и система 109 анализа и интерпретация данных содержат систему LIDAR.
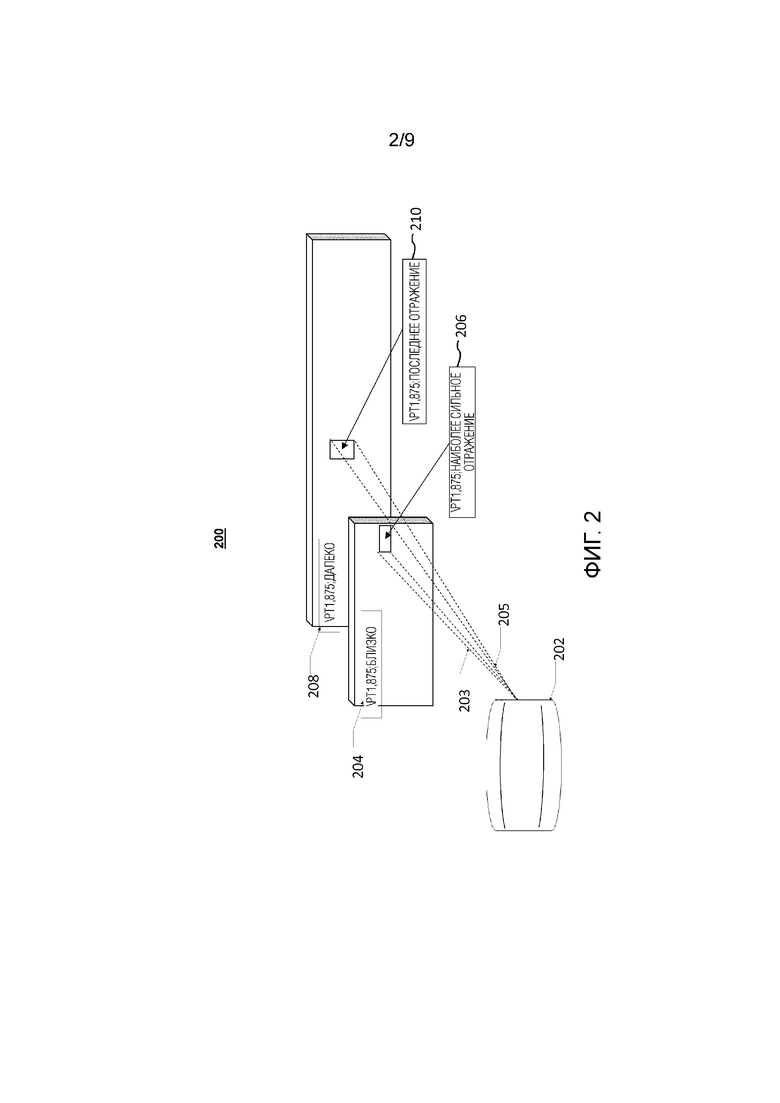
[0024] Фиг. 2 иллюстрирует операцию 200 оптической системы 202 обнаружения и измерения дальности, включающей в себя множество световых эхо-сигналов: (1) эхо-сигнал 203 и (2) эхо-сигнал 205 в соответствии с вариантами осуществления настоящего документа. Оптическая система 202 обнаружения и измерения дальности может представлять собой систему LIDAR. Вследствие расхождения лазерного луча единственный лазер, испускающий частые импульсы, попадает (направляет излучение) во множество объектов, производя несколько отражений. Оптическая система 202 обнаружения и измерения дальности может проанализировать множество отражений и может выдать отчет либо о самом сильном отражении, либо о последнем отражении, либо об обоих отражениях. На фиг. 2 оптическая система 202 обнаружения и измерения дальности обеспечивает излучение лазером в направлении близкой стены 204 (стены на близком расстоянии) и далекой стены 208 (стены на дальнем расстоянии). Как проиллюстрировано, большая часть луча попадает в стену 204 на близком расстоянии в области 206, обеспечивая в результате эхо-сигнал 203, и другая часть луча попадает в стену 208 на дальнем расстоянии в области 210, обеспечивая в результате эхо-сигнал 205. Эхо-сигнал 203 может иметь более короткое время пролета TOF и более сильную интенсивность принятого сигнала по сравнению с эхо-сигналом 205. Световая система 202 обнаружения и измерения дальности может зарегистрировать оба отражения, только если расстояние между двумя объектами больше минимального расстояния. И системе LIDAR и с единственным отражением, и с множественными отражениями для вычисления точного времени пролета TOF важно, чтобы эхо-сигнал был точно ассоциирован с переданным световым сигналом.
[0025] Некоторые варианты осуществления системы LIDAR могут собирать данные о расстоянии методом двухмерного облака точек (т.е., в одной плоскости). Эти системы LIDAR могут часто использоваться в промышленном применении и могут часто перепрофилироваться для инспекции, картографирования, автономной навигации и другого использования. Некоторые варианты осуществления этих устройств полагаются на использование единственной лазерной пары эмиттера/детектора, объединенной с движущимся зеркала некоторого типа для сканирования в пределах по меньшей мере одной плоскости. Это зеркало не только отражает излучаемый свет от диода, но и также может отражать световой эхо-сигнал детектору. Использование вращающегося зеркала в этой заявке может представлять собой средство для достижения 90-180-360 градусов обзора азимута, упрощая как системную конструкцию, так и технологичность.
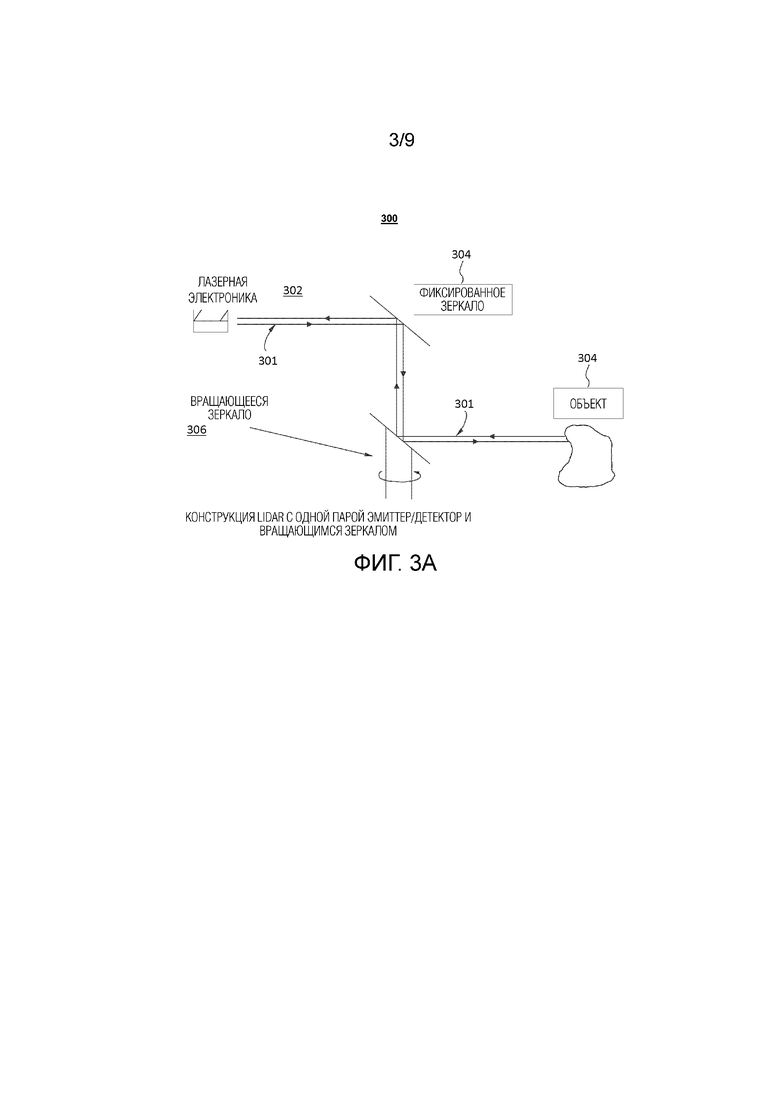
[0026] Фиг. 3 изображает систему 300 LIDAR с вращающимся зеркалом в соответствии с вариантами осуществления настоящего документа. Система 300 LIDAR использует один лазерный эмиттер/детектор, объединенный с вращающимся зеркалом, чтобы осуществлять эффективное сканирование в пределах плоскости. Измерения расстояния, выполняемые такой системой, являются существенно двухмерными (т.е., в плоскости), и захваченные точки расстояния воспроизводятся как двухмерное облако точек (т.е., единственная плоскость). В некоторых вариантах осуществления, но без ограничений, вращающиеся зеркала вращаются с очень быстрой скоростью, например, тысячи оборотов в минуту. Вращающееся зеркало также может упоминаться как крутящееся зеркало.
[0027] Система 300 LIDAR содержит лазерный электронный блок 302 (лазерная электроника), который содержит единый световой эмиттер и световой детектор. Излучаемый лазерный сигнал 301 может быть направлен на фиксированное зеркало 304, которое отражает излучаемый лазерный сигнал 301 на вращающееся зеркало 306. По мере "вращения" вращающегося зеркала 306 излучаемый лазерный сигнал 301 может отражаться от объекта 308 на пути его распространения. Отраженный сигнал 303 может быть подан на детектор в лазерный электронный блок 302 через вращающееся зеркало 306 и фиксированное зеркало 304.
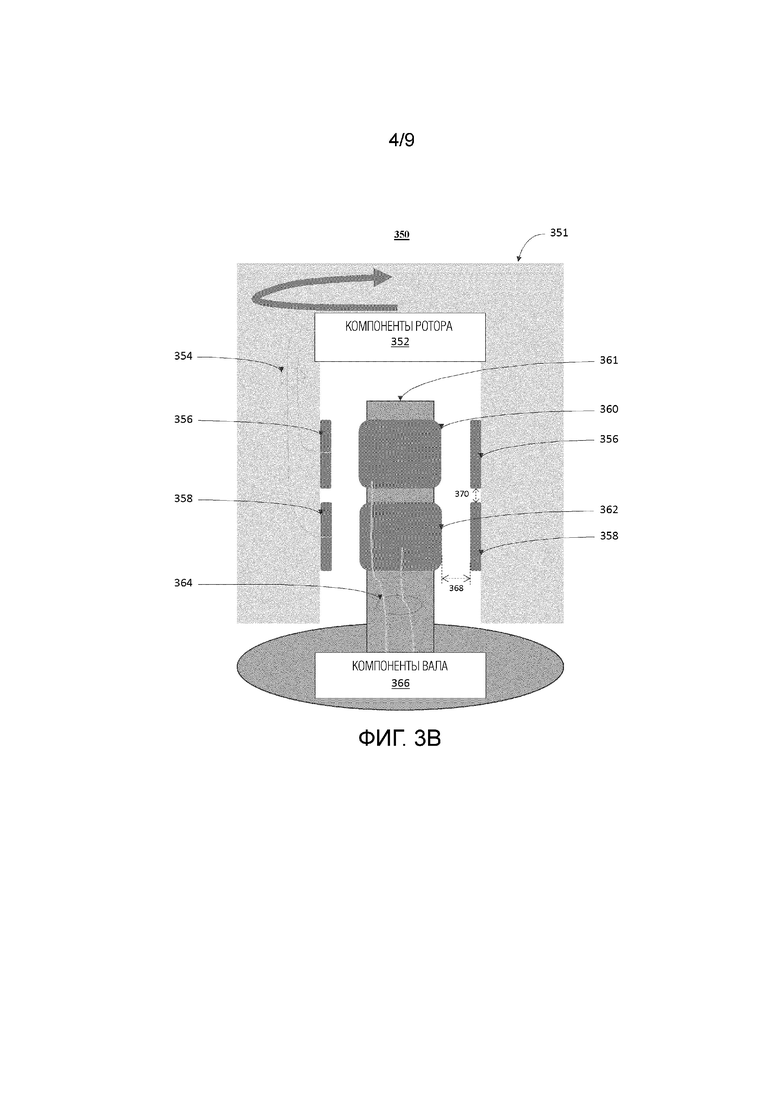
[0028] Фиг. 3B изображает систему 350 LIDAR с вращающейся электроникой в структуре "ротор-вал", содержащей ротор 351 и вал 361, в соответствии с вариантами осуществления настоящего документа. Ротор 351 может иметь цилиндрическую форму и содержать цилиндрическое отверстие в центре ротора 351. Вал 361 может быть помещен в цилиндрическое отверстие. Как проиллюстрировано, ротор 351 вращается вокруг вала 361. Эти компоненты могут быть включены в систему LIDAR. Ротор 351 может содержать компоненты 352 ротора, и вал 361 может содержать компоненты 366 вала. В компоненты 352 ротора включена верхняя печатная плата (PCB), и в компоненты 366 вала включена нижняя печатная плата (PCB). В некоторых вариантах осуществления компоненты 352 ротора могут содержать оптические компоненты 102 обнаружения и измерения дальности, и компоненты 366 вала могут содержать систему 109 анализа и интерпретации данных, показанные на фиг. 1.
[0029] К компонентам 352 ротора через соединения 354 присоединены кольцо 356 и кольцо 358. Кольцо 356 и кольцо 358 представляют собой кольцевые полоски, расположенные на внутренней поверхности ротора 351, и обеспечивают функциональность электродной пластины для одной стороны конденсатора с воздушным зазором. К компонентам 366 вала через соединения 364 присоединены кольцо 360 и кольцо 362. Кольцо 360 и кольцо 362 представляют собой кольцевые полоски, расположенные на внешней поверхности вала 361, и обеспечивают функциональность электродной пластины для другой стороны конденсатора с воздушным зазором. Конденсатор C1 может быть создан на основе пространства между кольцом 356 и кольцом 360. Другой конденсатор C2 может быть создан на основе пространства между кольцом 358 и кольцом 362. Емкость для упомянутых выше конденсаторов может быть частично определена воздушным зазором 368.
[0030] Кольцо 356 и кольцо 360 являются компонентами электродной пластины конденсатора C1, и кольцо 358 и кольцо 362 являются компонентами электродной пластины конденсатора C2. Вертикальный зазор 370 между кольцом 356 и кольцом 358 может повлиять на рабочие характеристики емкостной связи между конденсатором C1 и конденсатором C2, поскольку значение вертикального зазора 370 может определить уровень интерференции между двумя конденсаторами. Специалист в области техники поймет, что каждый из ротора 351 и вала 361 может каждый содержать N колец, которые могут поддерживать N емкостных связей.
[0031] Как отмечено ранее, время пролета, или TOF является способом, который система LIDAR использует для составления карты окружения и обеспечивает устойчивую к условиям эксплуатации и проверенную методику, используемую для обнаружения целевых объектов. Одновременно, по мере того как лазеры испускают лучи, программно-аппаратное обеспечение в системе LIDAR может анализировать и измерять принятые данные. Оптическая линза приема в системе LIDAR действует как телескоп, собирающий фрагменты световых фотонов, возвращающихся из окружения. Чем больше лазеров использовано в системе, тем больше информация об окружении может быть собрано. Системы LIDAR с единственным лазером могут находиться в невыгодном положении по сравнению с системами с несколькими лазерами, поскольку может быть извлечено меньше фотонов, и тем самым будет собрано меньше информации. Некоторые варианты осуществления, но без ограничения, систем LIDAR были реализованы с 8, 16, 32 и 64 лазерами. Кроме того, некоторые варианты осуществления LIDAR, но без ограничения, могут иметь вертикальное поле зрения (FOV) 30-40° с интервалом лазерного луча 0,3 °, и могут иметь скорости вращения 5-20 вращений в секунду.
[0032] Функциональность вращающегося зеркала также может быть реализована с помощью твердотельной технологии, такой как MEMS.
B. Защита от подмены эхо-сигнала
[0033] Одной целью вариантов осуществления настоящего документа является создание защищенной от подмены оптической системы обнаружения и измерения дальности. В контексте настоящего документа световая система обнаружения и измерения дальности может представлять собой, но без ограничения, систему LIDAR.
[0034] Защищенная от подмены система LIDAR может иметь способность анализировать эхо-сигнал, содержащий последовательность импульсов, и сопоставлять принятую последовательность импульсов с переданной последовательностью импульсов, чтобы отличить ее от других поддельных импульсов. В контексте настоящего документа эхо-сигнал, содержащий последовательность импульсов, может быть эквивалентен многократному эхо-сигналу или одиночному эхо-сигналу.
[0035] Защищенная от подмены система может быть основана на защищающих от подмены сигнатурах. Защищающая от подмены сигнатура может однозначно идентифицировать достоверный отраженный световой сигнал. Защищающая от подмены сигнатура может быть закодирована или встроена в импульсы, которые затем испускаются системой LIDAR. Когда система LIDAR принимает эхо-сигнал, система LIDAR может извлечь защищающую от подмены сигнатуру из одиночного или многократного эхо-сигнала и определить, совпадают ли декодированные импульсы принятого эхо-сигнала с импульсами, переданными в лазерном луче. Если импульсы действительно совпадают, эхо-сигнал можно считать удостоверенным, и данные могут декодироваться из импульсов эхо-сигнала. Если импульсы не совпадают, эхо-сигнал можно считать поддельным сигналом, и от эхо-сигнала можно отказаться. Действительно, система подтверждает подлинность или достоверность эхо-сигнала, используя характеристики переданных импульсов, которые содержат встроенную защищающую от подмены сигнатуру. Система может идентифицировать намеренные или непреднамеренные поддельные эхо-сигналы, которые могут ошибочно инициировать вычисление поддельного эхо-сигнала. Таким образом, система LIDAR может отличить переданные импульсы от поддельных импульсов. Кроме того, система может включать в себя два признака для ослабления воздействия подмены эхо-сигналов.
[0036] Во-первых, система LIDAR может динамически изменять характеристики импульсов для следующего или последующего испускания лазерного луча. Как обсуждалось ранее, характеристики импульсов могут быть определены посредством защищающей от подмены сигнатуры. Этот признак позволяет системе LIDAR отвечать на подменные атаки поддельных импульсов. Злонамеренная сторона может отслеживать переданный лазерный луч или эхо-сигналы, чтобы подвергнуть систему LIDAR подмене. При статической, а не динамической операции для защищающей от подмены сигнатуры злонамеренная сторона может без труда суметь подвергать систему LIDAR подмене.
[0037] Система LIDAR также может динамически изменять сигнатуру для следующего испускания луча, когда переданные последовательности импульса совпадают с последовательностями эхо-сигналов импульсов. Как отмечено, динамически изменяя защищающую от подмены сигнатуру для следующего испускания лазерного луча, потенциал для намеренных или непреднамеренных подмен может быть ослаблен. Обычно время пролета (TOF) лазерного луча, отправленного к объекту и отраженного обратно к системе LIDAR, составляет порядка 0,5-2 микросекунд. В этом периоде времени система LIDAR может проанализировать эхо-сигнал и принять решение, следует ли изменить сигнатуру для следующего испускания лазерного луча.
[0038] В различных вариантах осуществления система LIDAR также может динамически изменять передаваемую последовательность импульсов, которая содержит защищающую от подмены сигнатуру, а также адаптировать последовательность импульсов к окружающей обстановке, в которой она работает. Например, если система LIDAR используется в системе автономной навигации, погодные условия и/или загруженность дорог могут затронуть характер распространения световых сигналов. В этом варианте осуществления система LIDAR может подстраивать шаблон световых импульсов, не только чтобы однозначно идентифицировать его для приемника, но также, и чтобы улучшить рабочие характеристики системы на основе окружающей обстановки, в которой она работает.
[0039] Во-вторых, чтобы добавить другой элемент безопасности, система LIDAR может случайным образом изменять передаваемые импульсы. Кодирование на основе случайного алгоритма может быть инициировано инструкцией от контроллера. Этот признак может быть полезен для ослабления воздействия непреднамеренных эхо-сигналов. Непреднамеренные эхо-сигналы могут увеличиться с ростом автономного вождения на основе систем LIDAR.
[0040] Защищающие от подмены сигнатуры могут быть основаны, но без ограничений, на количестве импульсов, расстоянии между импульсами, амплитуде и отношении амплитуд импульсов, и форме импульсов. В качестве примера одной защищающей от подмены сигнатуры, количество импульсов в двух последовательностях испускания луча может содержать X импульсов в первой последовательности и Y импульсов во второй последовательности, где X не равно Y.
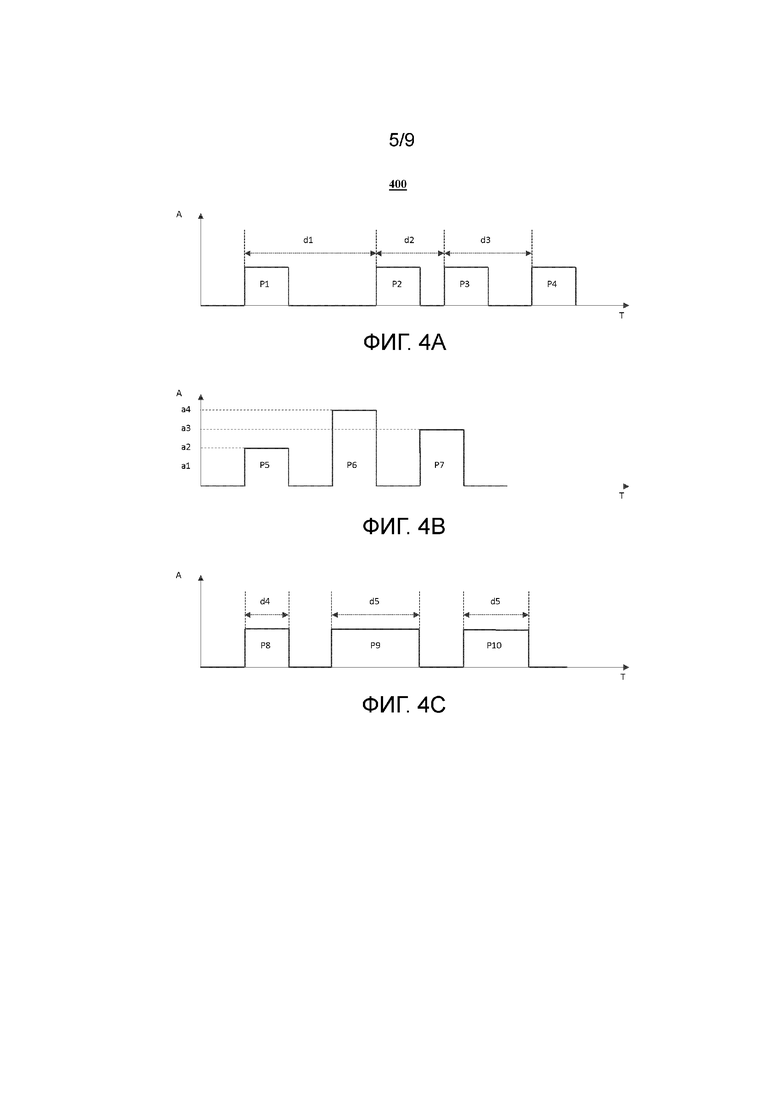
[0041] Каждая из фиг. 4А, 4B и 4C изображает защищающую от подмены сигнатуру 400 в соответствии с вариантами осуществления настоящего раскрытия. На этих фигурах A представляет амплитуду импульсов, и di представляет расстояние на временной шкале T. Фиг. 4А иллюстрируют последовательность из четырех импульсов, в которой вариация расстояний между каждым импульсом может определять защищающую от подмены сигнатуру. Например, расстояние между импульсом P1 и импульсом P2 может составлять d1. Расстояние между импульсом P2 и импульсом P3 может составлять d2. Расстояние между импульсом P3 и импульсом P4 может составлять d3. Как проиллюстрировано, d1>d3>d2.
[0042] Фиг. 4B иллюстрирует последовательность из трех импульсов, в которой вариация амплитуд может определять защищающую от подмены сигнатуру. Например, импульс P5 может иметь амплитуду a2. Импульс P6 может иметь амплитуду a4. Импульс P7 может иметь амплитуду a3. Как проиллюстрировано, a4>a3>a2. Сигнатура может быть основана на фиксированном отношении для амплитуд импульсов, и/или сигнатура может быть основана на переменных отношениях между импульсами, и/или сигнатура может быть основана на абсолютных амплитудах, заданных предопределенным или динамическим порогом.
[0043] Фиг. 4C иллюстрирует последовательность из трех импульсов, в которой вариация форм импульса может определять защищающую от подмены сигнатуру. В варианте осуществления на фиг. 4C вариация формы импульсов может представлять собой вариацию ширины импульсов. Например, импульс P8 может иметь ширину импульса d4. Импульс P9 может иметь ширину импульса d5. Импульс P10 может иметь ширину импульса d6, как проиллюстрировано d5>d6>d4.
[0044] Специалист в области техники поймет, что защищающие от подмены сигнатуры могут изменяться на основе применения и окружающей обстановки, в которой реализованы варианты осуществления изобретения, и подразумевается, что все это входит в объем изобретения. Защищающие от подмены сигнатуры могут быть использованы отдельно или в комбинации. Обнаружение защищающих от подмены сигнатур может быть реализовано с фиксированными или переменными порогами.
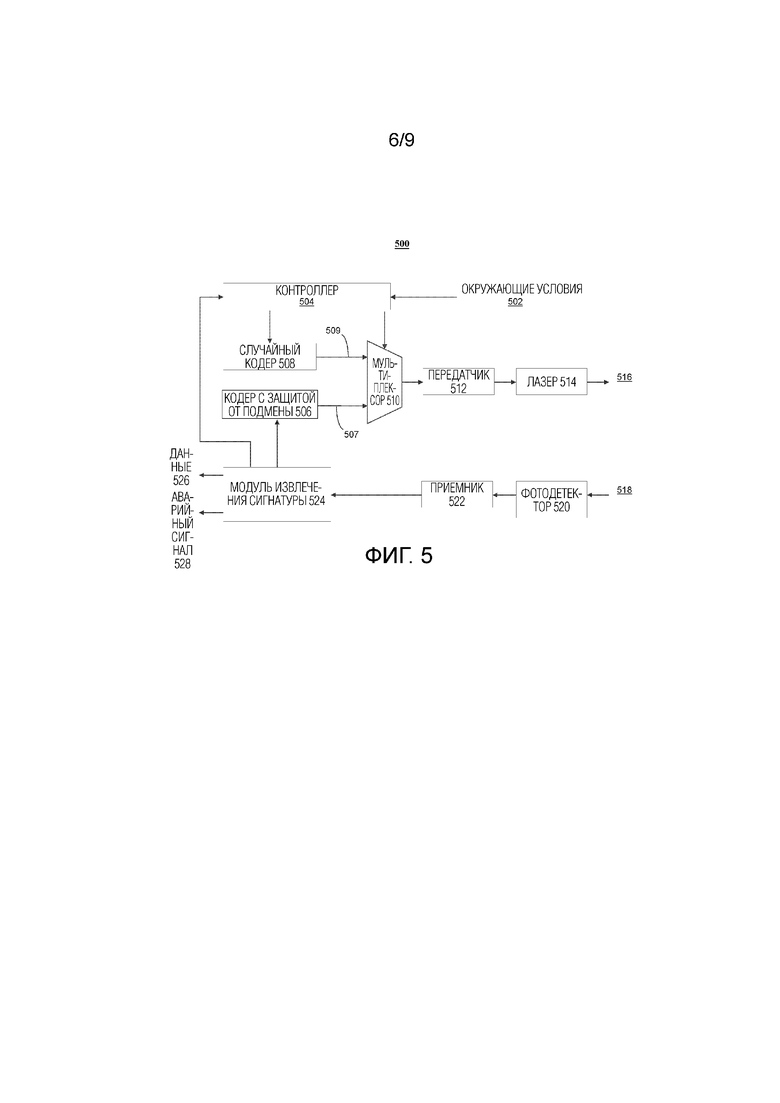
[0045] Фиг. 5 изображает систему 500 для ослабления воздействия подмены эхо-сигнала в световой системе измерения дальности и обнаружения в соответствии с вариантами осуществления настоящего раскрытия. В контексте настоящего документа "защищающая от подмены сигнатура" может упоминаться как "сигнатура". Как обсуждалось ранее, защищающая от подмены сигнатура может быть основана на характеристиках импульсов, таких как вариации количества импульсов в двух или больше последовательностях импульсов, вариации расстояний между импульсами, вариации отношений амплитуд импульсов или вариации ширины импульсов.
[0046] Модуль 524 извлечения сигнатуры может отправлять сигнал, который определяет сигнатуру, которая будет встроена в последовательность импульсов, кодеру 506 с защитой от подмены и контроллеру 504. Кодер 506 с защитой от подмены может формировать на основе заданной сигнатуры сигнал 507 кодирования сигнатуры, который содержит последовательность импульсов со встроенной сигнатурой, которая будет испущена лазером 514. Чтобы создать элемент случайности в последовательностях импульсов, случайный кодер 508 (на основе инструкций от контроллера 504) может обеспечить случайную подстройку текущей последовательности импульсов относительно предшествующей последовательности импульсов. Случайный кодер 508 выполнен с возможностью вносить случайность в характеристики последовательностей импульсов передаваемого лазерного луча относительно предшествующей последовательности переданных импульсов. Контроллер 504 может инициировать случайную подстройку текущей последовательности импульсов, даже если подменная атака не была идентифицирована. Модуль 524 извлечения сигнатуры может обеспечить контроллеру 504 статус для защищающей от подмены операции.
[0047] Сигнал 507 кодирования сигнатуры может быть подан на мультиплексор 510. В свою очередь мультиплексор 510 объединяет сигнал 509 с внесенным элементом случайности от случайного кодера 508 и сигнал 507 кодирования сигнатуры от кодера 506 с защитой от подмены. Выходные данные мультиплексора 510 могут быть поданы на передатчик 512, который может быть присоединен к лазеру 514. После приема последовательности импульсов от передатчика 512 лазер 514 испускает лазерный луч 516, который включает в себя последовательность импульсов со встроенной сигнатурой.
[0048] Световой эхо-сигнал 518 может быть сформирован посредством отражения от объекта лазерным лучом 516 и может быть принят фотодетектором 520. В качестве альтернативы световой эхо-сигнал 518 может являться подмененным эхо-сигналом, сформированным другим световым передатчиком. Подмененный эхо-сигнал может являться намеренным или непреднамеренным эхо-сигналом.
[0049] Фотодетектор 520 преобразовывает сигнал из оптической области в электрическую область и подает информацию эхо-сигнала на приемник 522. Приемник 522 может выдать оцифрованную форму информации эхо-сигнала модулю 524 извлечения сигнатуры или аналоговый сигнал на основе заданных характеристик фотодетектора. Модуль 524 извлечения сигнатуры обрабатывает информацию эхо-сигнала и извлекает сигнатуру, чтобы подтвердить подлинность или достоверность эхо-сигнала. Если характеристики последовательности импульсов эхо-сигнала совпадают с характеристиками переданной последовательности импульсов, то многократный эхо-сигнал можно считать подлинным. Модуль извлечения сигнатуры может перейти к выдаче выходных данных 526. Модуль извлечения сигнатуры также может перейти к выдаче аварийного сигнала 528, который может быть подан на контроллер более высокого уровня.
[0050] Если характеристики последовательности эхо-сигнала не совпадают c характеристиками переданной последовательности импульсов, то эхо-сигнал можно считать не подлинным. В ответ модуль 524 извлечения сигнатуры может динамически указать кодеру 506 с защитой от подмены выбрать другую сигнатуру для следующего испускания лазерного луча. Другими словами, модуль 524 извлечения сигнатуры может динамически изменить защищающую от подмены сигнатуру для следующей последовательности импульсов, которые будут переданы, относительно предшествующей последовательности переданных импульсов. Порог для определения соответствия импульсов может быть предопределен или динамически подстраиваться на основе вариации эксплуатационных параметров.
[0051] Контроллер 504 принимает окружающие условия 502, которые могут включать в себя информацию о погодных условиях, загруженности дорог, условиях проверки/калибровки/изготовления. На основе окружающих условий 502 и инструкций от модуля 524 извлечения сигнатуры контроллер 504 может обеспечить инструкции для работы случайного кодера 508 и мультиплексора 510.
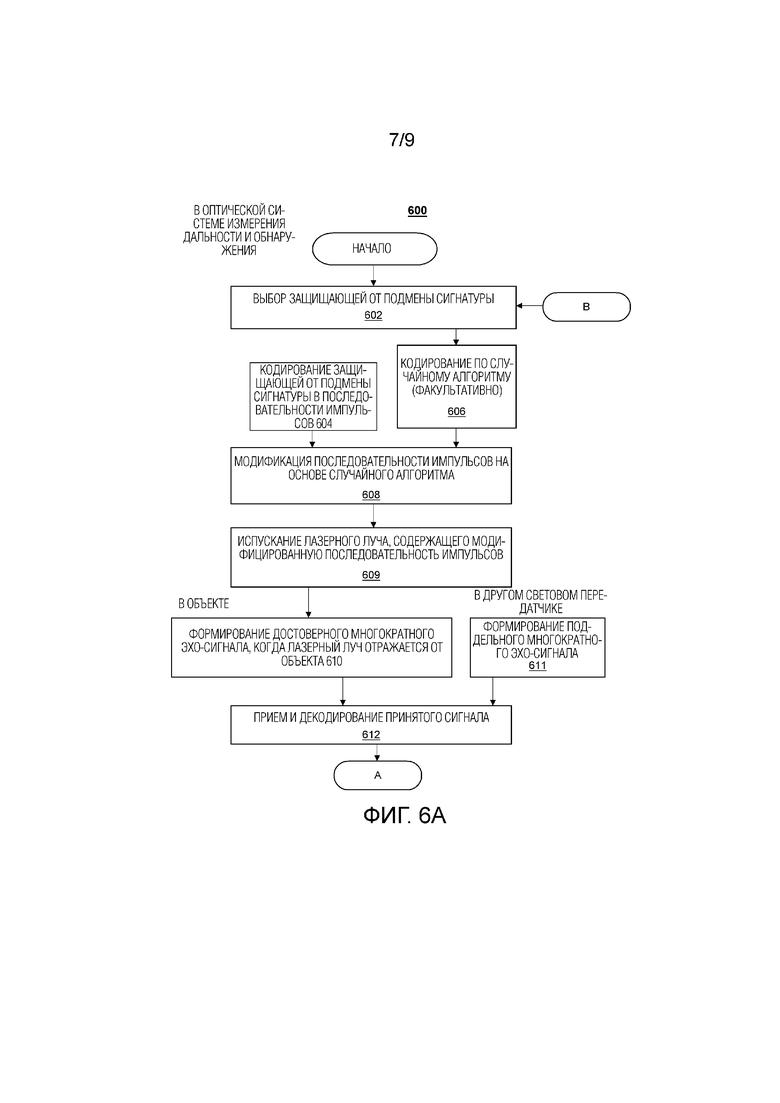
[0052] Фиг. 6А и 6B изображают блок-схемы 600 и 650 последовательности этапов для ослабления воздействия подмены эхо-сигнала в световой системе измерения дальности и обнаружения в соответствии с вариантами осуществления настоящего раскрытия. Способ содержит следующие этапы в световой системе измерения дальности и обнаружения.
[0053] Выбор защищающей от подмены сигнатуры (этап 602),
[0054] Кодирование последовательности импульсов с помощью защищающей от подмены сигнатуры (этап 606),
[0055] Активация случайного алгоритма кодирования (этап 604) (факультативный),
[0056] Модификация последовательности импульсов на основе случайного алгоритма кодирования, если активирован (этап 608),
[0057] Испускание лазерного луча, содержащего модифицированную последовательность импульсов (этап 609),
[0058] В объекте: формирование достоверного многократного эхо-сигнала, когда лазерный луч отражается от объекта (этап 610),
[0059] Или в другом световом передатчике: формирование поддельного многократного эхо-сигнала (этап 611),
[0060] Прием и декодирование принятого сигнала, который содержит достоверный многократный эхо-сигнал или поддельный многократный эхо-сигнал (этап 612),
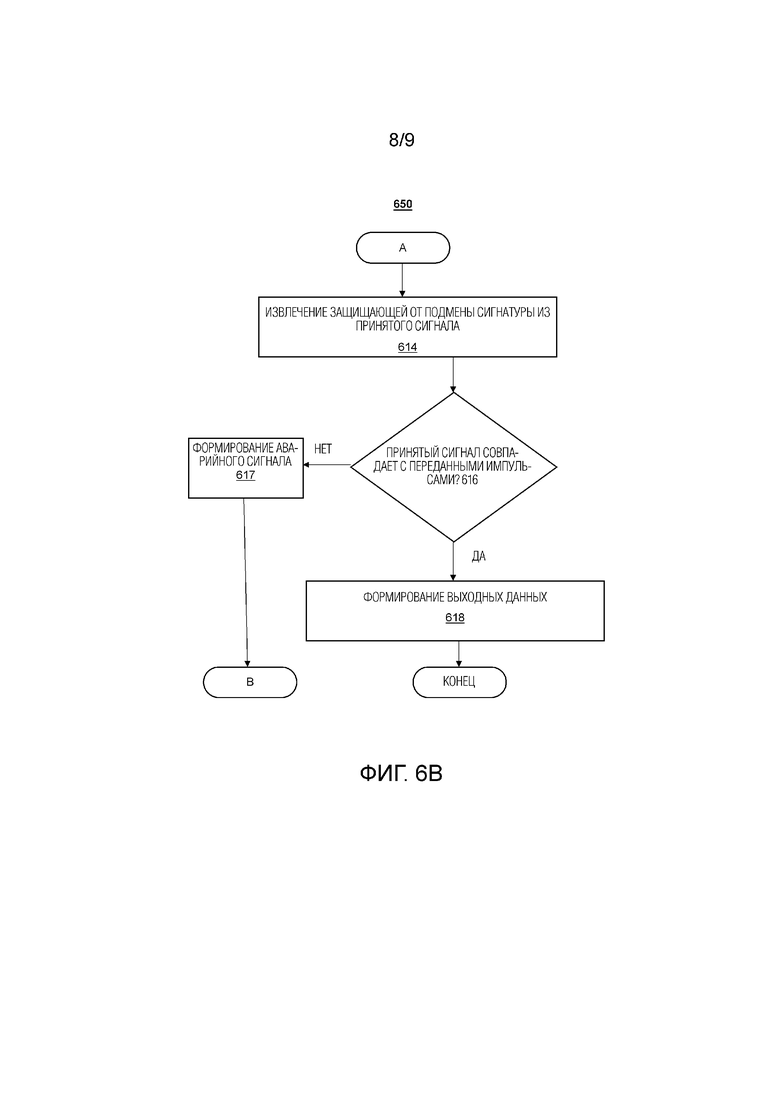
[0061] Извлечение защищающей от подмены сигнатуры из принятого сигнала (этап 614),
[0062] Определение, совпадают ли характеристики импульсов в принятом сигнале с характеристиками импульсов в переданных последовательностях импульсов? (этап 616),
[0063] Если да, формирование выходных данных (этап 618),
[0064] Если нет, формирование сигнала тревоги (этап 617) и повторение этапа 602.
[0065] Варианты осуществления настоящего документа могут включать в себя систему, содержащую модуль извлечения сигнатуры, выполненный с возможностью выбора защищающей от подмены сигнатуры; кодер с защитой от подмены, выполненный с возможностью встраивать защищающую от подмены сигнатуру в передаваемый лазерный луч, содержащий последовательность импульсов; контроллер; и декодер, выполненный с возможностью декодировать эхо-сигнал. Модуль извлечения сигнатуры извлекает защищающую от подмены сигнатуру из декодированного эхо-сигнала и определяет, совпадают ли характеристики декодированного эхо-сигнала с характеристиками последовательностей импульсов переданного лазерного луча. Если декодированный эхо-сигнал совпадает с характеристиками переданного лазерного луча, модуль извлечения сигнатуры подтверждает достоверность декодированного эхо-сигнала и выдает данные декодированного эхо-сигнала. Если декодированный эхо-сигнал не совпадает с характеристиками переданного лазерного луча, модуль извлечения сигнатуры признает недостоверным декодированный эхо-сигнал, игнорирует декодированный эхо-сигнал и выдает аварийный сигнал. Для следующей последовательности импульсов, которые будут переданы, модуль извлечения сигнатуры динамически изменяет защищающую от подмены сигнатуру.
[0066] Система дополнительно содержит случайный кодер, выполненный с возможностью придавать элемент случайности характеристикам последовательностей импульсов передаваемого лазерного луча относительно предшествующей последовательности переданных импульсов. Контроллер принимает окружающие условия, которые определяют характеристики для последовательности импульсов передаваемого лазерного луча. Защищающая от подмены сигнатура динамически изменяется на основе окружающих условий. Защищающая от подмены сигнатура динамически изменяется на основе окружающих условий. Характеристикам для последовательностей импульсов переданного лазерного луча придается элемент случайности на основе окружающих условий. Окружающие условия содержат погодные условия, загруженность дорог или условия проверки/калибровки/изготовления, защищающая от подмены сигнатура основана на характеристиках импульсов, таких как вариации количества импульсов в двух или более последовательностях импульсов, вариации расстояния между импульсами, вариации отношений амплитуд импульсов или вариации ширины импульсов.
C. Варианты осуществления системы
[0067] В вариантах осуществления аспекты настоящего патентного документа могут быть направлены или реализованы на системах обработки информации /вычислительных системах. В целях этого раскрытия вычислительная система может включать в себя любой инструментарий или совокупность инструментариев, выполненных с возможностью подсчитывать, вычислять, определять, классифицировать, обрабатывать, передавать, принимать, извлекать, создавать, маршрутизировать, переключать, хранить, отображать, сообщать, демонстрировать, обнаруживать, записывать, воспроизводить, манипулировать или использовать любую форму информации, знаний или данных для коммерческих, научных, управленческих или других целей. Например, вычислительная система может представлять собой световую систему измерения, такую как система LIDAR, которая использует время пролета, чтобы составить карту объектов в своем окружении. Вычислительная система может включать в себя оперативное запоминающее устройство (ОЗУ; RAM), один или несколько ресурсов обработки, таких как центральный процессор (ЦП; CPU) или аппаратные средства или логическую схему программного управления, постоянное запоминающее устройство (ПЗУ; ROM) и/или память других типов. Дополнительные компоненты вычислительной системы могут включать в себя один или более сетевых или беспроводных портов для связи с внешними устройствами, а также различные устройства ввода и вывода (I/O), такие как клавиатура, мышь, сенсорный экран и/или видеодисплей. Вычислительная система также может включать в себя одну или более шин, выполненных с возможностью осуществлять связь между различными аппаратными компонентами.
[0068] Фиг. 7 изображает упрощенную блок-схему вычислительного устройства/системы обработки информации (или вычислительной системы) в соответствии с вариантами осуществления настоящего раскрытия. Следует понимать, что функциональность, показанная для системы 700, может быть выполнена с возможностью поддерживать различные варианты осуществления системы обработки информации - хотя следует понимать, что система обработки информации может быть сконфигурирована по-другому и включать в себя разные компоненты.
[0069] Как проиллюстрировано на фиг. 7, система 700 включает в себя один или более центральных процессоров 701 (ЦП; CPU), которые обеспечивают вычислительные ресурсы и управляет компьютером. Центральный процессор 701 может быть реализован с помощью микропроцессора и т.п., а также может включать в себя один или более графических процессоров 717 (GPU) и/или сопроцессор для операций с плавающей точкой для математических вычислений. Система 700 также может включать в себя системную память 702, которая может иметь форму оперативного запоминающего устройства (ОЗУ; RAM), постоянного запоминающего устройства (ПЗУ; ROM) или обоих.
[0070] Также могут быть обеспечены несколько контроллеров и периферийных устройств, как показано на фиг. 7. Входной контроллер 703 представляет интерфейс различным устройствам 704 ввода, таким как клавиатура, мышь или стилус. Также может иметься беспроводной контроллер 705, который взаимодействует с беспроводным устройством 706. Система 700 также может включать в себя контроллер 707 запоминающих устройств для установления интерфейса с одним или более запоминающими устройствами 708, каждое из которых включает в себя носитель информации, такой как флэш-память или оптический носитель, который может использоваться записи программ инструкций для операционных систем, утилит и приложений, которые могут включать в себя варианты осуществления программ, которые реализуют различные аспекты настоящего изобретения. Запоминающее устройство (устройства) 708 также может использоваться для хранения обработанных данных или данных, которые будут обработаны, в соответствии с изобретением. Система 700 также может включать в себя контроллер 708 отображения для обеспечения интерфейса устройству 711 отображения. Вычислительная система 700 также может включать в себя контроллер 712 автомобильного сигнала для связи с автомобильной системой 713. Контроллер 714 связи может взаимодействовать с одним или более устройствами 715 связи, которые позволяют системе 700 соединяться с удаленными устройствами через любую из множества сетей, в том числе автомобильную сеть, Интернет, облачный ресурс (например, облако Ethernet, оптический канал через Ethernet (FCoE) / облако моста центра обработки данных (DCB) и т.д.), локальная сеть (LAN), широкомасштабная сеть (WAN), сеть хранения данных (SAN) или через любые подходящие сигналы электромагнитной несущей, в том числе инфракрасные сигналы.
[0071] В проиллюстрированной системе все главные системные компоненты могут быть соединены с шиной 716, которая может представлять более чем одну физическую шину. Однако различные системные компоненты могут находиться или могут не находиться в физической близости друг к другу. Например, входные данные и/или выходные данные могут удаленно передаваться из одного физического местоположения в другое. Кроме того, к программам, которые реализуют различные аспекты этого изобретения, можно осуществить доступ из удаленного местоположения (например, сервера) по сети. Такие данные и/или программы могут быть перемещены через любые разнообразные машиночитаемые носители, в том числе, но без ограничения: магнитные носители, такие как жесткие диски, гибкие диски и магнитная лента; оптические носители, такие как компакт-диски, предназначенные только для чтения (CD-ROM) и голографические устройства; магнитооптические носители; и устройства, которые специально сконфигурированы для хранения или хранения и исполнения программного кода, такие как специализированные интегральные схемы (ASIC), программируемые логические устройства (PLD), устройства флэш-памяти, оперативное запоминающее устройство (ОЗУ; RAM) и постоянное запоминающее устройство (ПЗУ; ROM).
[0072] Варианты осуществления настоящего изобретения могут быть закодированы на одном или более машиночитаемых носителях долговременного хранения с помощью инструкций для одного или более процессоров или блоков обработки, чтобы предписать выполнение этапов. Следует отметить, что один или более машиночитаемых носителей долговременного хранения должен включать в себя энергозависимую и энергонезависимую память. Следует отметить, что возможны альтернативные реализации, включающие в себя аппаратную реализацию или программно-аппаратную реализацию. Реализованные аппаратными средствами функции могут быть реализованы с использованием специализированной интегральной схемы (схем) (ASIC), программируемой матрицы, схемы цифровой обработки сигналов и т.п. В соответствии с этим термин "средство" в любом пункте формулы изобретения охватывает и программную, и аппаратную реализации. Аналогичным образом, термин “машиночитаемый носитель или носители” в контексте настоящего документа включает в себя программное обеспечение и/или аппаратные средства, имеющие воплощенную на них программу инструкций, или их комбинацию. Помня об этих альтернативных реализациях, следует понимать, что чертежи и прилагаемое описание предоставляют функциональную информацию, которая потребовалась бы специалисту в области техники, чтобы написать программный код (т.е., программное обеспечение) и/или изготовить схемы (т.е., аппаратные средства), чтобы выполнить требуемую обработку.
[0073] Следует отметить, что варианты осуществления настоящего изобретения также могут относиться к компьютерным продуктам с материальным машиночитаемым носителем долговременного хранения, которые имеют записанный на них компьютерный код для выполнения различных реализованных с помощью компьютера операций. Носители и компьютерный код могут быть специально разработаны и сконструированы в целях настоящего изобретения, или они могут иметь вид, известный или доступный специалистам в соответствующих областях техники. Примеры материальных машиночитаемых носителей включают в себя, но без ограничения: магнитные носители, такие как жесткие диски, гибкие диски и магнитная лента; оптические носители, такие как компакт-диски, предназначенные только для чтения (CD-ROM) и голографические устройства; магнитооптические носители; и устройства, которые специально сконфигурированы для хранения или хранения и исполнения программного кода, такие как специализированные интегральные схемы (ASIC), программируемые логические устройства (PLD), устройства флэш-памяти, оперативное запоминающее устройство (ОЗУ; RAM) и постоянное запоминающее устройство (ПЗУ; ROM). Примеры компьютерного кода включают в себя машинный код, например, произведенный компилятором, и файлы, содержащие высокоуровневый код, который исполняется компьютером с использованием интерпретатора. Варианты осуществления настоящего изобретения могут быть реализованы полностью или частично как исполняемые машиной инструкции, которые могут находиться в программных модулях, которые исполняются устройством обработки. Примеры программных модулей включают в себя библиотеки, программы, подпрограммы, объекты, компоненты и структуры данных. В распределенных вычислительных средах программные модули могут быть физически расположены в местах, которые являются локальными, удаленными, или и теми, и другими.
[0074] Специалист в области признает, что ни вычислительная система, ни язык программирования не являются критически важными для практики настоящего изобретения. Специалист области техники также признает, что многие описанные выше элементы могут быть физически и/или функционально разделены на подмодули или объединены вместе.
[0075] Специалистам в области техники будет очевидно, что предыдущие примеры и варианты осуществления являются иллюстративными и не ограничивают объем настоящего раскрытия. Подразумевается, что все перестановки, усовершенствования, эквиваленты, комбинации и улучшения к ним, которые очевидны для специалистов в области техники после прочтения описания и изучения чертежей, включены в сущность и объем настоящего раскрытия. Следует также отметить, что элементы любого пункта формулы изобретения могут быть скомпонованы по-другому, в том числе иметь множественные зависимости, конфигурации и комбинации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ОБНАРУЖЕНИЯ ОБМАННЫХ ОБЪЕКТОВ И АНАЛИЗА ЖИЗНЕННОСТИ | 2016 |
|
RU2715521C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ОБНАРУЖЕНИЯ ОБМАННЫХ ОБЪЕКТОВ И АНАЛИЗА ЖИЗНЕННОСТИ | 2016 |
|
RU2725413C2 |
| СИСТЕМЫ И СПОСОБЫ ПОДАВЛЕНИЯ ЗАСВЕТКИ ЛАВИННОГО ФОТОДИОДА (ЛФД) | 2019 |
|
RU2772379C2 |
| СПОСОБЫ И СИСТЕМЫ ОБНАРУЖЕНИЯ ЛИДАРОВ | 2020 |
|
RU2775823C2 |
| Лидарная система и способ с когерентным детектированием | 2020 |
|
RU2792949C2 |
| СПОСОБЫ И СИСТЕМЫ ОБНАРУЖЕНИЯ С ПОМОЩЬЮ ЛИДАРА (LiDAR) С ВОЛОКОННО-ОПТИЧЕСКОЙ МАТРИЦЕЙ | 2019 |
|
RU2762744C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ПЕРЕДАЧИ ДАННЫХ ПОСРЕДСТВОМ БЕСКОНТАКТНОГО ЦИЛИНДРИЧЕСКОГО ИНТЕРФЕЙСА | 2019 |
|
RU2780225C2 |
| ОПТИЧЕСКИЕ СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ ИМИ | 2020 |
|
RU2793241C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ВЫБОРОЧНЫМ СКАНИРОВАНИЕМ | 2020 |
|
RU2792951C2 |
| МУЛЬТИСПЕКТРАЛЬНЫЕ ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2792948C2 |
Использование: настоящее раскрытие в целом относится к системам и способам для пропускания и приема света и, в частности, к улучшению безопасности систем пропускания и приема света посредством применения уникальных и идентифицируемых последовательностей световых импульсов, чтобы препятствовать подмене отраженного света, обнаруженного системой (системами). Сущность: система содержит передатчик и приемник. Первая последовательность импульсов может быть закодирована с помощью защищающей от подмены сигнатуры и передана в лазерном луче. Эхо-сигнал, содержащий вторую последовательность импульсов, может быть принят приемником, и защищающая от подмены сигнатура извлекается из второй последовательности импульсов. Если на основе извлечения первая и вторая последовательностей импульсов совпадают, приемник выводит данные эхо-сигнала. Если на основе извлечения первая и вторая последовательности импульсов не совпадают, эхо-сигнал игнорируется. Система может динамически изменять защищающую от подмены сигнатуру для последующих последовательностей импульсов. Кроме того, в первую последовательность импульсов может быть внесен элемент случайности относительно предшествующей последовательности импульсов. Технический результат: улучшение обнаружения эхо-сигнала в световой системе обнаружения и измерения дальности, включающие в себя ослабление воздействия подменной атаки. 3 н. и 16 з.п. ф-лы, 11 ил. 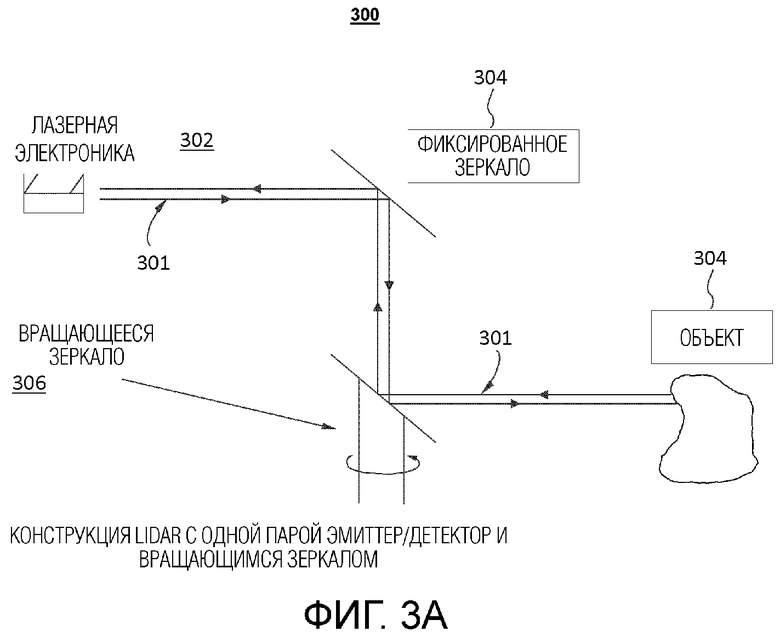
1. Световая система измерения и обнаружения дальности, содержащая:
модуль извлечения сигнатуры, выполненный с возможностью выбирать защищающую от подмены сигнатуру;
кодер с защитой от подмены, выполненный с возможностью встраивать защищающую от подмены сигнатуру в передаваемый лазерный луч, содержащий последовательность импульсов;
контроллер; и
декодер, выполненный с возможностью декодировать эхо-сигнал,
причем модуль извлечения сигнатуры извлекает защищающую от подмены сигнатуру из декодированного эхо-сигнала и определяет, совпадают ли одна или более характеристик декодированного эхо-сигнала в соответствующих пороговых значениях с одной или более характеристиками последовательностей импульсов переданного лазерного луча, при этом одна или более характеристик включают вариации количества импульсов в двух или более последовательностях импульсов, вариации расстояний между импульсами, вариации отношений амплитуд импульсов или вариации ширины импульсов, или их комбинации.
2. Система по п. 1, в которой, если декодированный эхо-сигнал совпадает с характеристиками переданного лазерного луча, модуль извлечения сигнатуры подтверждает достоверность декодированного эхо-сигнала и выдает данные декодированного эхо-сигнала.
3. Система по п. 1, в которой, если декодированный эхо-сигнал не совпадает с характеристиками переданного лазерного луча, модуль извлечения сигнатуры признает недостоверным декодированный эхо-сигнал, игнорирует декодированный эхо-сигнал и выдает аварийный сигнал.
4. Система по п. 1, в которой для следующей последовательности импульсов, которые будут переданы, модуль извлечения сигнатуры динамически изменяет защищающую от подмены сигнатуру.
5. Система по п. 1, дополнительно содержащая случайный кодер, выполненный с возможностью внести элемент случайности в характеристики последовательностей импульсов, которые будут переданы, относительно предшествующей последовательности переданных импульсов.
6. Система по п. 1, в которой контроллер принимает окружающие условия, которые определяют характеристики для последовательности импульсов передаваемого лазерного луча.
7. Система по п. 6, в которой защищающая от подмены сигнатура динамически изменяется на основе окружающих условий.
8. Система по п. 6, в которой в характеристики для последовательностей импульсов передаваемого лазерного луча вносится элемент случайности на основе окружающих условий.
9. Система по п. 6, в которой окружающие условия содержат погодные условия, загруженность дорог или условия проверки/калибровки/изготовления.
10. Способ измерения и обнаружения дальности с помощью света, содержащий этапы, на которых:
выбирают защищающую от подмены сигнатуру;
кодируют защищающую от подмены сигнатуру в первой последовательности импульсов; испускают лазерный луч, содержащий первую последовательность импульсов, принимают и декодируют эхо-сигнал, содержащий вторую последовательность импульсов; извлекают защищающую от подмены сигнатуры из второй последовательности импульсов; и определяют, совпадает ли одна или более характеристик второй последовательности импульсов в соответствующих пороговых значениях с одной или более характеристиками первой последовательностью импульсов, при этом одна или более характеристик включают вариации количества импульсов в двух или более последовательностях импульсов, вариации расстояний между импульсами, вариации отношений амплитуд импульсов или вариации ширины импульсов, или их комбинации.
11. Способ по п. 10, дополнительно содержащий этап, на котором динамически изменяют защищающую от подмены сигнатуру для следующей последовательности импульсов, которые будут переданы.
12. Способ по п. 10, дополнительно содержащий этап, на котором привносят элемент случайности в характеристики следующей последовательности импульсов, которые будут переданы.
13. Способ по п. 10, дополнительно содержащий этап, на котором,
если вторая последовательность импульсов совпадает с первой последовательностью импульсов, формируют выходные данные декодированного эхо-сигнала.
14. Способ по п. 10, дополнительно содержащий этап, на котором,
если вторая последовательность импульсов не совпадает с первой последовательностью импульсов, игнорируют вторую последовательность импульсов и формируют аварийный сигнал.
15. Способ по п. 10, дополнительно содержащий этап, на котором подстраивают первую последовательность импульсов на основе окружающих условий.
16. Способ по п. 15, в котором окружающие условия содержат погодные условия, загруженность дорог, условия проверки/калибровки/изготовления.
17. Машиночитаемый носитель информации долговременного хранения, имеющий сохраненный на нем компьютерный программный код, который при его исполнении на одном или более процессорах, реализованных в оптической системе обнаружения и измерения дальности, побуждает оптическую систему обнаружения и измерения дальности выполнять способ, содержащий этапы, на которых:
выбирают вторую защищающую от подмены сигнатуру для второй последовательности импульсов, которая отличается от первой защищающей от подмены сигнатуры, использованной в ранее переданной первой последовательности импульсов;
кодируют вторую защищающую от подмены сигнатуру во второй последовательности импульсов; вносят элемент случайности во вторую последовательность импульсов; испускают лазерный луч, содержащий вторую последовательность импульсов; принимают и декодируют эхо-сигнал, содержащий третью последовательность импульсов; извлекают вторую защищающую от подмены сигнатуры из третьей последовательности импульсов; и
определяют, совпадает ли третья последовательность импульсов со второй последовательностью импульсов.
18. Машиночитаемый носитель информации по п. 17, в котором способ дополнительно содержит этап, на котором,
если третья последовательность импульсов совпадает со второй последовательностью импульсов, формируют выходные данные на основе эхо-сигнала.
19. Машиночитаемый носитель информации по п. 17, в котором способ дополнительно содержит этап, на котором,
если третья последовательность импульсов не совпадает со второй последовательностью импульсов, игнорируют третью последовательность импульсов и формируют аварийный сигнал.
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 9383753 B1, 05.07.2016 | |||
| US 5023888 A, 11.06.1991 | |||
| US 5274379 A, 28.12.1993 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |

