Изобретение относится к области железнодорожной автоматики и связи и может использоваться для автоматического оповещения работающих на железнодорожном пути на перегоне о приближении железнодорожного подвижного состава и ограждения места работ.
Известен способ оповещения о приближении железнодорожного подвижного состава, заключающийся в том, что датчики обнаружения подвижного состава, расположенные на железнодорожных путях по обе стороны от места проведения работ, с каждой стороны по два датчика на одном пути на расстоянии друг от друга, передают на соответствующий системный блок контрольные сигналы и сигналы оповещения при обнаружении датчиками подвижного состава, системные блоки передают полученные сигналы по радиоканалу на центральный блок управления, с помощью которого сигналы передают по радиоканалу на коллективные и индивидуальные оповещатели, при этом передачу сигнала оповещения от системного блока на центральный блок управления осуществляют только при передаче на системный блок сигнала оповещения от обоих датчиков, установленных на одном пути, и при последовательности передачи сигналов оповещения от этих датчиков, соответствующих направлению в сторону места проведения работ, а при поступлении на системный блок сигналов оповещения только от одного из двух датчиков и при отсутствии сигналов оповещения от второго датчика не осуществляют передачу сигналов оповещения от системного блока на центральный блок управления, при этом центральный блок управления регистрирует отказ соответствующего направления системы оповещения (RU 2606755 С1, B61L 23/06, 10.01.2015).
В известном способе контроль функционирования датчиков обнаружения подвижного состава и системных блоков в автоматическом режиме осуществляет центральный блок управления под контролем сигналиста, находящегося на месте проведения работ, который в случае нарушения их функционирования сообщает об этом сигналисту ограждения и при получении соответствующего сообщения от него ручным способом включает сигнал оповещения и передает его по радиоканалу на коллективные и индивидуальные оповещатели.
Недостатком известного способа является то, что при наличии автоматизации процесса оповещения работающих о приближении подвижного состава для его реализации требуются тем не менее сигналисты, обеспечивающие ограждение границ участка работ.
Известен способ оповещения работающих на железнодорожных путях, заключающийся в том, что перед началом работ на подошве рельса железнодорожного пути по обе стороны от границ места работ на заданном расстоянии устанавливают датчики обнаружения подвижного состава, каждый из которых снабжен радиостанцией, а также на заданном расстоянии по обе стороны от границ места работ у ремонтируемого пути устанавливают переносные устройства ограждения, выполненные в виде сигнальных радиоуправляемых устройств ограждения, а на месте работ - коллективный переносный сигнализатор, обеспечивающий взаимодействие по радиоканалу с радиостанциями датчиков обнаружения подвижного состав и сигнальными радиоуправляемыми устройствами ограждения, коллективный переносный сигнализатор в автоматическом режиме передает сигналы, активизирующие работу датчиков обнаружения подвижного состава, которые при отсутствии подвижного состава формируют контрольные сигналы, а при обнаружении подвижного состава - сигналы оповещения и передают их коллективному переносному сигнализатору, который в автоматическом режиме осуществляет их воспроизведение в виде соответствующих тональных и оптических сигналов контроля и сигналов оповещения, а при отсутствии контрольных сигналов включает аварийную сигнализацию и информирует об отказе конкретного датчика обнаружения подвижного состава, причем при наличии препятствий движения на месте проведения работ, а также при их отсутствии посредством коллективного переносного сигнализатора в ручном режиме задают соответствующий управляющий сигнал, который передают по радиоканалу сигнальным радиоуправляемым устройствам ограждения для формирования запрещающего показания или разрешающего показания, при этом сигнальные радиоуправляемые устройства ограждения выполнены с возможностью контроля сигнальных показаний с последующей передачей результатов контроля по радиоканалу на коллективный переносный сигнализатор, который в автоматическом режиме сравнивает их с заданным управляющим сигналом и при совпадении формирует оптический сигнал, подтверждающий показания каждого сигнального радиоуправляемого устройства ограждения, а при несовпадении включает аварийную сигнализацию в виде соответствующего оптического и тонального сигналов тревоги (RU 2655566 C1, B61L 23/06, 28.05.2018).
Известный способ обеспечивает повышение безопасности движения и безопасности работающих на железнодорожных путях в результате уменьшения влияния на их обеспечение человеческого фактора.
Недостатком способа является необходимость использования, датчиков обнаружения подвижного состава, которые устанавливают перед началом работ на подошве рельса железнодорожного пути по обе стороны от границ места работ на заданном расстоянии, а также переносные устройства ограждения, которые также устанавливают перед началом работ на заданном расстоянии по обе стороны от границ места работ у ремонтируемого пути, что требует дополнительных людских ресурсов.
Известен способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ заключающийся в том, что на месте работ устанавливают коллективный переносный сигнализатор с автономным источником питания, через ближайший пункт доступа на перегоне к межстанционной линии связи централизованной системы автоблокировки подключают переносную радиостанцию с автономным источником питания, причем коллективный переносный сигнализатор выполнен с возможностью взаимодействия по радиоканалам с системой спутниковой навигации и с переносной радиостанцией, коллективный переносный сигнализатор по системе спутниковой навигации получает информацию о своем местоположении, а по данным централизованной системы автоблокировки - информацию о занятии подвижным составом блок-участков на перегоне, сопоставляет в режиме реального времени полученную информацию и при приближении на заданное расстояние подвижного состава к своему местоположению формирует и воспроизводит сигналы оповещения в виде соответствующих звуковых и оптических сигналов, при наличии на месте выполнения работ препятствия для движения подвижного состава коллективный переносной сигнализатор передает по команде руководителя работ через переносную радиостанцию по межстанционной линии связи централизованной системы автоблокировки в аппаратно-программное устройство рабочего места дежурного по станции сообщение о наличии препятствия на месте работ, при получении которого дежурный по станции ограждает место работ путем подачи в аппаратно-программный комплекс централизованной системы автоблокировки команды для остановки подвижного состава до его подхода к месту работ посредством автоматической локомотивной сигнализации (RU 2702368 C1, B61L 23/00, 08.10.2019).
При этом при отсутствии приближающегося подвижного состава коллективный переносный сигнализатор формирует и воспроизводит контрольные звуковые и оптические сигналы.
Недостатком рассмотренного выше способа является необходимость участия в ограждении места работ дежурного по станции.
Технический результат предполагаемого изобретения заключается в повышении надежности оповещения на месте проведения работ и ограждения места работ за счет автоматизации процессов, как оповещения, так и ограждения места работ.
Технический результат достигается тем, что в способе оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ через ближайший к месту работ на перегоне пункт доступа межстанционной линии связи централизованной системы автоблокировки подключают ретранслятор с автономным источником питания, на месте работ устанавливают коллективный переносимый сигнализатор с автономным источником питания, выполненный с возможностью взаимодействия по радиоканалу с системой спутниковой навигации и с ретранслятором для информационного обмена с аппаратно-программным комплексом централизованной системы автоблокировки, при включении питания коллективный переносимый сигнализатор в режиме реального времени от системы спутниковой навигации получает информацию о географических координатах своего местоположения и преобразует их в номер рельсовой цепи в зоне своего местонахождения, а по данным аппаратно-программного комплекса централизованной системы автоблокировки - информацию о номерах занимаемых подвижным составом рельсовых цепей на перегоне, автоматически сопоставляет полученную информацию и при приближении на заданное расстояние подвижного состава к рельсовой цепи, на которой он расположен, формирует и воспроизводит сигналы оповещения в виде соответствующих звуковых и оптических сигналов, при наличии на месте выполнения работ препятствия для движения подвижного состава коллективный переносимый сигнализатор для ограждения места проведения работ по команде руководителя работ передает по радиоканалу через ретранслятор и межстанционную линию связи соответствующее сообщение в аппаратно-программный комплекс централизованной системы автоблокировки, который автоматически формирует и передает команды по системе сигнализации для остановки подвижного состава до его подхода к месту работ посредством автоматической локомотивной сигнализации или закрытия выходного светофора, а также формирует и передает коллективному переносимому сигнализатору сообщение о выполнении команды ограждения места проведения работ по межстанционной линии связи через ретранслятор по радиоканалу.
При этом при отсутствии приближающегося подвижного состава коллективный переносимый сигнализатор формирует и воспроизводит контрольные звуковые и оптические сигналы.
Коллективный переносимый сигнализатор дешифрирует поступающие от аппаратно-программного комплекса централизованной системы автоблокировки сообщения и формирует на их основе сигналы контроля или оповещения в двух идентичных трактах, а воспроизведение сигналов контроля или оповещения осуществляет только при условии идентичности сигналов на выходе обоих трактов, а при их различии - воспроизводит аварийный сигнал.
Кроме того, коллективный переносимый сигнализатор анализирует воспроизводимые звуковые сигналы контроля или оповещения и формирует сигналы подтверждения или сигналы аварии, которые передает по радиоканалу через ретранслятор и межстанционную линию связи в аппаратно-программный комплекс централизованной системы автоблокировки для информирования обслуживающего персонала, при этом сигналы аварии воспроизводят в виде соответствующих звуковых и оптических сигналов.
При этом поступающие сообщения об отсутствии или наличии препятствия для движения поездов на месте работ от коллективного переносимого сигнализатора на аппаратно-программный комплекс централизованной системы автоблокировки предварительно дешифрируют двумя идентичными дешифраторами и передают их в аппаратно-программный комплекс централизованной системы автоблокировки только при полной идентичности дешифрированных сообщений, а при их различии - воспроизводят аварийный сигнал и предотвращают поступление сообщений в систему автоблокировки.
В коллективном переносимом сигнализаторе сигнал подтверждения об исполнении в автоблокировке команд остановки поезда или разрешения движения сравнивается с передаваемым сообщением о наличии или отсутствии препятствия для движения поездов и при их несоответствии воспроизводится аварийная сигнализация.
Руководитель работ снабжен переносимым пультом управления и контроля, взаимодействующим с коллективным переносимым сигнализатором по радиоканалу.
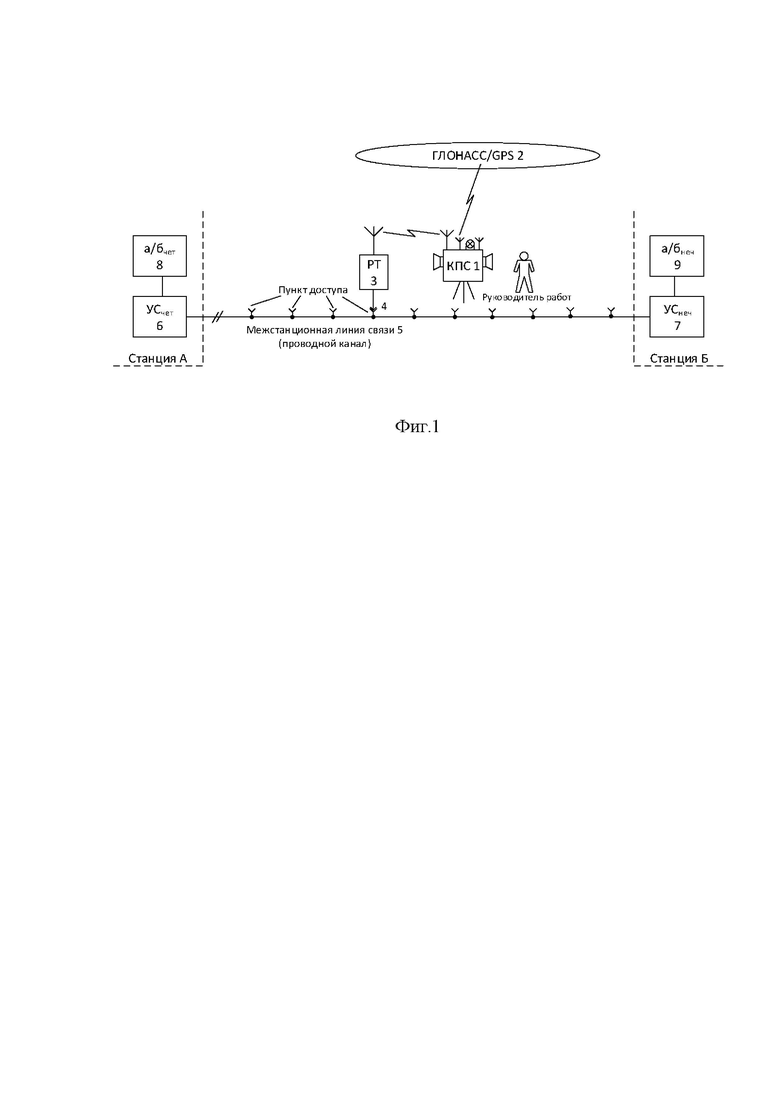
Сущность предлагаемого изобретения поясняется чертежами на фиг.1 и фиг.2. На фиг.1 представлена структурная схема оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ, реализующая предлагаемый способ, на фиг.2 - функциональная схема взаимодействия коллективного переносимого сигнализатора с централизованной системой автоблокировки.
Автоматизированная система оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ содержит установленный на месте работ коллективный переносимый сигнализатор 1 (КПС 1) с автономным источником питания, выполненный с возможностью взаимодействия по радиоканалам с системой 2 спутниковой навигации ГЛОНАСС/GPS и по радиоканалу с ретранслятором 3 (РТ 3) с автономным источником питания, подключенным через ближайший к месту работ пункт 4 доступа к линии 5 межстанционной связи централизованной системы автоблокировки, соединенной через устройства 6 и 7 сопряжения (УСч 6 и УСнч 7) с аппаратно-программными комплексами 8 и 9 централизованной системы автоблокировки соответственно четного и нечетного направления. Устройства автономного электропитания на перегоне на чертеже не показаны.
Руководитель работ снабжен носимым пультом управления и контроля, выполненным с возможностью взаимодействия с КПС 1 по радиоканалу (на чертеже не показан).
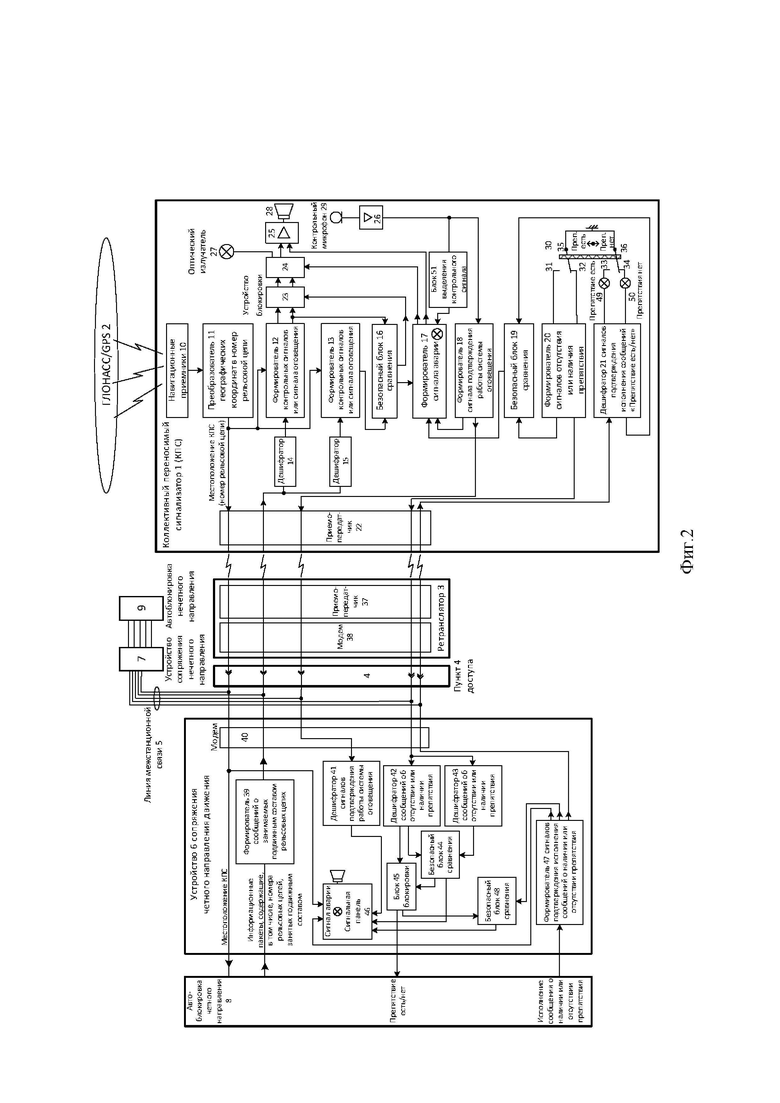
КПС 1 включает навигационный приемник 10, преобразователь 11 географических координат в номер рельсовой цепи, формирователи 12 и 13 сигналов контроля и оповещения, два дешифратора 14 и 15, безопасный блок 16 сравнения, формирователь 17 сигналов аварии, формирователь 18 сигналов подтверждения функционирования системы оповещения, безопасный блок 19 сравнения, формирователь 20 наличия или отсутствия препятствий, дешифратор 21 сигнала подтверждения сообщений «препятствие есть/нет», приемопередатчик 22, два блока 23 и 24 блокировки, два усилителя 25 и 26 оптический излучатель 27, громкоговоритель 28, контрольный микрофон 29, переключатель 30 с контактами 31, 32, 33, 34, 35 и 36.
Ретранслятор 3 содержит приемопередатчик 37 и модем 38.
Каждое УСч 6 и УСнч 7 включает формирователь 39 сообщений о занимаемых подвижным составом рельсовых цепях, модем 40, дешифратор 41сигналов подтверждения работы системы оповещения, два дешифратора 42 и 43 сообщений об отсутствии или наличия препятствий, безопасный блок 44 сравнения, блок 45 блокировки, сигнальную панель 46, формирователь 47 сигналов подтверждения сообщений о наличии или отсутствия препятствий, второй безопасный блок 48 сравнения.
КПС 1 включает также оптические индикаторам 49 и 50 соответственно наличия препятствия и отсутствия препятствия и блок 51 выделения контрольного сигнала.
Выход аппаратно-программного комплекса 8 автоблокировки четного (нечетного) направления движения соединен с входом формирователя 39 сообщений о занимаемых подвижным составом номерах рельсовых цепей, выход которого подключен ко входу модема 40, подключенного к межстанционной линии 5 связи, к которой через пункт 4 доступа подключен находящийся в ретрансляторе 3 модем 38, соединенный с приемо-передатчиком 37, связанным по радиоканалу с приемопередатчиком 22 КПС1, выход которого соединен с включенными параллельно идентичными дешифраторами 14 и 15. Выход дешифратора 14 подключен к входу формирователя 12, выход дешифратора 15 - к входу формирователя 13.
Первый и второй выходы формирователя 12 подключены через блоки 23 и 24 блокировки соответственно и к оптическому излучателю 27 и к входу усилителя 25, нагруженного на громкоговоритель 28.
Навигационный приемник 10, взаимодействует по радиоканалу с навигационной системой 2 ГЛОНАСС/GPS. Выход приемника 10, подключен к входу преобразователя 11 географических координат в номер рельсовой цепи, в зоне которой находится КПС 1. Выход преобразователя 11 соединен со вторыми входами формирователей 12 и 13 и через приемопередатчик 22, связанный с ним по радиоканалу приемопередатчик 37, модем 38, пункт 4 доступа, линию 5 межстанционной связи с модемом 40, выход которого соединен с соответствующим входом аппаратно-программного комплекса 8 системы автоблокировки и первым входом сигнальной панели 46.
Выход формирователя 13 и второй выход формирователя 12 подключены к входам безопасного блока 16 сравнения.
Один из выходов блока 16 сравнения подключен к входу формирователя 17 сигналов аварии, выходом соединенного со вторым входом усилителя 25 . Другой выход блока 16 сравнения подключен к управляющему входу блока 23 блокировки.
Контрольный микрофон 29, на который поступают сигналы, воспроизводимые громкоговорителем 28, через усилитель 26 соединен с входом формирователя 18 сигналов подтверждения функционирования системы оповещения.
Первый выход формирователя 18 подключен к входу приемопередатчика 22, связанного по каналу радиосвязи с приемопередатчиком 37, к выходу которого подключен модем 38, соединенный через пункт 4 доступа с линией 5 межстанционной связи с модемом 40, к выходу которого подключен дешифратор 41 сигналов подтверждения функционирования системы оповещения, выходом соединенный со вторым входом сигнальной панели 46.
Второй выход формирователя 18 соединен с одним из входов формирователя 17 сигнала аварии.
К выходу усилителя 26 контрольного микрофона 29 подключено также блок 48 выделения контрольного сигнала, выход которого соединен с одним из входов формирователя 17 аварийных сигналов.
Контакты 31 и 32 переключателя 30, устанавливающего КПС 1 в режим передачи сигналов об отсутствии или наличии препятствия для движения поездов на месте работ, подключены к формирователю 20 сигналов отсутствия или наличия препятствия, один из выходов которого подключен к входу приемопередатчика 22, взаимодействующего по каналу радиосвязи с находящимся в ретрансляторе 3 приемопередатчиком 37, выход которого соединен с модемом 38, подключенным через пункт 4 доступа к линии 5 межстанционной связи, соединенной с модемом 40, к выходу которого подключены идентичные дешифраторы 42 и 43 сообщений об отсутствии или наличии препятствия для движения. Выходы дешифраторов 42 и 43 соединены с входами безопасного блока 44 сравнения.
Выход дешифратора 42 подключен также к входу блока 45 блокировки, выходы которого подключены к соответствующему входу аппаратно-программного комплекса 8 централизованной системы автоблокировки и к входу безопасного блока 48 сравнения.
Выходы безопасного блока 44 сравнения подключены к управляющему входу устройства блокировки 45 и к третьему входу сигнальной панели 46, четвертый вход которой соединен с выходом блока 48 сравнения.
К соответствующему выходу аппаратно-программного комплекса 8 системы автоблокировки подключен вход формирователя 47 сигналов подтверждения исполнения принятых сообщений об отсутствии или наличии препятствия для движения поездов на месте работ, первый выход которого подключен к пятому входу сигнальной панели 46, а второй выход - ко второму входу блока 48 сравнения.
Третий выход формирователя 47 подключен к входу модема 40, соединенного с линией 5 межстанционной связи, с пунктом 4 доступа, к которому подключен модем 38, соединенный с приемопередатчиком 37 ретранслятора 3. Выход приемопередатчика 37 по радиоканалу связан с приемопередатчиком 22 КПС 1, выход которого подключен к дешифратору 21 сигналов подтверждения исполнения сообщений об отсутствии или наличии препятствий на месте работ. Первый и второй выходы дешифратора 21 подключены к оптическим индикаторам 49 и 50 соответственно наличия препятствия и отсутствия препятствия, соединенными соответственно с контактами 33 и 34 переключателя 30.
Третий выход дешифратора 21 соединен с одним из входов безопасного блока 19 сравнения, подключенный вторым входом ко второму выходу формирователя 20 сигналов отсутствия или наличия препятствия.
Выход блока 19 сравнения подключен ко четвертому входу формирователя 17 сигналов аварии.
Способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ реализуется следующим образом.
При включении электропитания установленного на месте работ КПС 1 навигационный приемник 10 на основании данных, получаемых из навигационной системы 2 ГЛОНАСС/GPS, передает в преобразователь 11 географические данные о местоположении КПС 1, который преобразует их в номер рельсовой цепи в зоне нахождения КПС 1. Данные о номере рельсовой цепи с выхода преобразователя 11поступают на один из входов идентичных формирователей 12 и 13 контрольных сигналов и сигналов оповещения и на вход приемопередатчика 22, связанного радиоканалом с входом находящегося в ретрансляторе 3 приемопередатчика 37, соединенного со входом модема 38, подключенного через пункт 4 доступа к линии 5 межстанционной связи, подключенной к модему 40, выход которого соединен с аппаратно-программным комплексом 8 централизованной системы автоблокировки и с входом сигнальной панели 46.
На вход формирователя 39 периодически поступает из аппаратно-программного комплекса 8 системы автоблокировки пакет информации, из которой формирователь 39 извлекает данные о номерах занимаемых подвижным составом рельсовых цепях в каждые 600 мс и передает их через модем 40 в линию 5 межстанционной связи через пункт 4 доступа на вход входящего в ретранслятор 3 модема 38, с выхода модема 38 на вход приемопередатчика 37, взаимодействующего по радиоканалу с входящим в КПС 1 приемопередатчиком 22, с выхода которого на входы дешифраторов 14 и 15, соединенных выходами соответственно с входами формирователей 12 и 13 контрольных сигналов и сигналов оповещения.
В результате автоматического сопоставления данных о номере рельсовой цепи местоположения КПС 1 и номерах рельсовых цепей, занимаемых подвижным составом в четном направлении движения, с учетом максимальной разрешенной на данном перегоне скорости движения, протяженности рельсовых цепей и необходимости воспроизведения сигнала оповещения за 60 с до подхода подвижного состава к месту работ, формирователи 12 и 13 определяют необходимость формирования контрольного сигнала при отсутствии на соответствующем расстоянии подвижного состава или сигнала оповещения, поступающего с выхода формирователя 12 через открытые блоки 23 и 24 блокировки на оптический излучатель 27 и на вход усилителя 25, нагруженного на громкоговоритель 28.
Блок 23 блокировки находится в открытом состоянии при поступлении на его управляющий вход соответствующего сигнала от безопасного блока 16 сравнения, формирующегося при идентичности сигналов, поступающих на его входы от формирователей 12 и 13.
При расхождении сигналов от формирователей 12 и 13, свидетельствующем об ошибке при дешифрации и образовании сигналов контроля или оповещения, блок 16 сравнения запирает устройство 23, в результате чего исключается возможность поступления сигналов на вход усилителя 22 и включается, соединенный со вторым выходом устройства сравнения 16, формирователь 17, который формирует сигнала аварии, поступающий на второй вход усилителя 25 и воспроизводимый громкоговорителем 28.
Режим работы и отказ КПС 1 контролируют контрольным микрофоном 29, на который поступают сигналы, воспроизводимые громкоговорителем 28. Через усилитель 26 воспроизводимые микрофоном 29 сигналы поступают на вход формирователя 18 сигналов подтверждения функционирования системы оповещения. Формирователь 18 полученные сигналы передает через приемопередатчик 22, ретранслятор 3, пункт 4 доступа, линию 5 межстанционной связи, модем 40 на вход дешифратора 41 сигналов подтверждения работы системы оповещения, к выходу которого подключен один из входов сигнальной панели 46, индицирующей либо нормальную работу системы оповещения, либо отказ. При этом воспроизводимые громкоговорителем 28 сигналы формирователь передает формирователю 17 сигнала аварии, формирующий сигнал аварии, который через усилитель 25 воспроизводится громкоговорителем 28.
С целью дополнительного исключения возможности ложного воспроизведения контрольных сигналов, подключенный к выходу контрольного микрофона 29 блок 51 выделяет контрольные сигналы и передает соответствующий сигнал в формирователь 17 аварийных сигналов.
При поступлении на формирователь 17 сигнала от блока 16 сравнения, который формируемого при расхождении результатов дешифрации и формирования сигналов контроля или оповещения и сигнала от блока 51 выделения контрольного сигнала, подтверждающего о воспроизведении контрольных сигналов, от формирователя 17 аварийных сигналов поступает на блок 24 блокировки управляющая команда, в результате чего блок 24 запирает тракт поступления контрольных сигналов на вход усилителя 25 и оптического излучателя 27 и, следовательно, воспроизведение их громкоговорителем 28 и излучателем 27 прекращается. Возвращение блоку 24 блокировки в открытое состояние осуществляется обслуживающим персоналом.
При отсутствии на месте работ препятствия для движения поездов переключатель 30 наличия/отсутствия препятствия в четном направлении движения находится в положении, при котором замкнуты контакты 32-35 и 34,36. При этом формирователь 20 передает сигнал отсутствия препятствия с одного из выходов на вход безопасного блока 19 сравнения, а с другого выхода - на вход приемопередатчика 22, который по радиоканалу передает его приемопередатчику 37, соединенного с модемом 38. С выхода модема 38 через пункт доступа 4 по линии 5 межстанционной связи сигнал отсутствия препятствия поступает через модем 40 на два идентичных дешифратора 42 и 43, с выхода которых дешифрированный сигнал поступает на входы безопасного блока 44 сравнения, а со второго выхода дешифратора 42 через открытый блок 45 блокировки на вход аппаратно-программного комплекса 8 системы автоблокировки и на один из входов безопасного блока сравнения 48.
Выход безопасного блока 44 сравнения поступает на управляющий вход блока 45 блокировки.
При полной идентичности сигналов на входах блок 44 сравнения формирует соответствующий сигнал для передачи на управляющий вход блока 45 блокировки, который поддерживает блок 45 блокировки в открытом состоянии. При этом с выхода блока 45 сигналы об отсутствии препятствия поступают на вход аппаратно-программного комплекса 8 системы автоблокировки.
При расхождении сигналов на входах блок 44 сравнения формирует сигнал, запирающий блок 45 блокировки, в результате на вход аппаратно-программного комплекса 8 системы автоблокировки не поступает сигналы об отсутствии препятствия.
Со второго выхода блока 44 сравнения соответствующий сигнал поступает на сигнальную панель 46, на которой включается индикация о нормальной работе системы ограждения или аварийная сигнализация.
Результат исполнения сообщений об отсутствии препятствия на месте работ из аппаратно-программного комплекса 8 системы автоблокировки поступает на вход формирователя 47 сигналов подтверждения, выдающего информацию о результате исполнения в системе автоблокировки сообщения об отсутствии препятствия на месте работ.
Сигнал подтверждения об отсутствии препятствий с выхода формирователя 47 поступает на один из входов безопасного блока 48 сравнения, на второй вход которого со второго выхода блока 45 поступает сигнал, содержащий сообщение об отсутствии препятствия на месте работ.
При соответствии сигнала подтверждения сообщению об отсутствии препятствия на месте работ на сигнальную панель 46 от блока 48 сравнения поступает сигнал, индицирующий нормальное функционирование системы ограждения. При расхождении сигналов на сигнальной панели 46 включается аварийная сигнализация.
Сигнал с третьего выхода формирователя 47 поступает через модем 40, линию 5 межстанционной связи, пункт 4 доступа на вход модема 38, соединенного с приемопередатчиком 37, взаимодействующего по радиоканалу с входящим в состав КПС 1 приемопередатчиком 22, с выхода которого на вход дешифратора 21 сигналов подтверждения исполнения сообщений о наличии или отсутствии препятствия, к выходам которого подключены оптические индикаторы 49 и 50, соединенные соответственно с контактами 33 и 34 переключателя 30.
Свечение индикатора 50 в положении переключателя 30 «Отсутствие препятствия», при котором замкнуты контакты 34-36, свидетельствует о нормальном функционировании системы ограждения. Отсутствие свечения и включение аварийной сигнализации на формирователе 17 свидетельствует об отказе системы.
Включение аварийной сигнализации осуществляется блоком 19 сравнения, на входы которого поступают сигналы от формирователя 20 сигналов отсутствия или наличия препятствия и от дешифратора 21 сигналов подтверждения исполнения переданных сообщений.
При соответствии переданных сообщений сигналам подтверждения на вход формирователя 17 аварийных сигналов поступает с выхода блока 19 сравнения информация, подтверждающая нормальную работу системы. При несоответствии - включается аварийный сигнал.
Функционирование системы при наличии препятствия на месте работ осуществляется аналогично при положении переключателя 30 в положении «Препятствие есть», при котором замкнуты контакты 31-35 и 33, 36.
Для передачи сигналов ограждения в аппаратно-программный комплекс 9 системы автоблокировки нечетного направления в КПС 1 предусмотрена аналогичная группа устройств в составе переключателя 30, формирователя 20, безопасного блока 19 сравнения, блока 17 блокировки, дешифратора 21 сигналов подтверждения, оптических индикаторов 49 и 50 и формирователя 17 сигнала аварии, функционирующая аналогично устройствам передачи сигналов отсутствия препятствия в аппаратно-программный комплекс 9 системы автоблокировки нечетного направления.
Таким образом, в результате автоматизации процесса ограждения повышается надежность системы, обеспечивается уменьшение влияния человеческого фактора и, следовательно, повышение безопасности работающих и безопасности движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматизированного оповещения работающих на железнодорожном пути перегона о приближении подвижного состава с ограждением места работ | 2023 |
|
RU2799949C1 |
| Способ автоматического оповещения работающих в железнодорожном тоннеле о приближении железнодорожного подвижного состава с ограждением места работ | 2021 |
|
RU2763069C1 |
| Способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ | 2019 |
|
RU2702368C1 |
| Система оповещения о приближении подвижного состава, ограждения места работ и технологической радиосвязи путевой машины | 2020 |
|
RU2749681C1 |
| Способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ | 2019 |
|
RU2702379C1 |
| Система ограждения места работ и оповещения работающих на железнодорожном пути о приближении подвижного состава | 2020 |
|
RU2746627C1 |
| СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОГО ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ | 2021 |
|
RU2773550C1 |
| Способ ограждения места проведения работ и оповещения работающих на железнодорожных путях | 2017 |
|
RU2655566C1 |
| Автоматизированная система ограждения места работ по текущему содержанию железнодорожного пути с оповещением работающих о приближении подвижного состава без использования сигналистов (СОРБИС-М1) | 2020 |
|
RU2733452C1 |
| Система оповещения работающих на перегоне о приближении подвижного состава с ограждением места проведения работ | 2019 |
|
RU2725327C1 |
Изобретение относится к области автоматического оповещения путевых рабочих. В способе через ближайший к месту работ на перегоне пункт доступа межстанционной линии связи централизованной системы автоблокировки подключают ретранслятор с автономным источником питания, на месте работ устанавливают коллективный переносимый сигнализатор с автономным источником питания, выполненный с возможностью взаимодействия по радиоканалу с системой спутниковой навигации и с ретранслятором для информационного обмена с аппаратно-программным комплексом централизованной системы автоблокировки, при включении питания коллективный переносимый сигнализатор в режиме реального времени от системы спутниковой навигации получает информацию о географических координатах своего местоположения и преобразует их в номер рельсовой цепи в зоне своего местонахождения, а по данным аппаратно-программного комплекса централизованной системы автоблокировки - информацию о номерах занимаемых подвижным составом рельсовых цепей на перегоне, автоматически сопоставляет полученную информацию и при приближении на заданное расстояние подвижного состава к рельсовой цепи, на которой он расположен, формирует и воспроизводит сигналы оповещения в виде соответствующих звуковых и оптических сигналов. При наличии на месте выполнения работ препятствия для движения подвижного состава коллективный переносимый сигнализатор для ограждения места проведения работ по команде руководителя работ передает по радиоканалу через ретранслятор и межстанционную линию связи соответствующее сообщение в аппаратно-программный комплекс централизованной системы автоблокировки, который автоматически формирует и передает команды по системе сигнализации для остановки подвижного состава до его подхода к месту работ посредством автоматической локомотивной сигнализации или закрытия выходного светофора, а также формирует и передает коллективному переносимому сигнализатору сообщение о выполнении команды ограждения места проведения работ по межстанционной линии связи через ретранслятор по радиоканалу. Достигается повышение надежности оповещения и ограждения на месте проведения путевых работ. 6 з.п. ф-лы, 2 ил.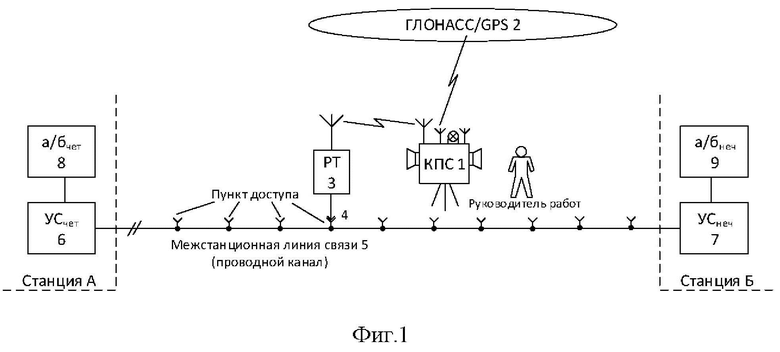
1. Способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ, заключающийся в том, что через ближайший к месту работ на перегоне пункт доступа межстанционной линии связи централизованной системы автоблокировки подключают ретранслятор с автономным источником питания, на месте работ устанавливают коллективный переносимый сигнализатор с автономным источником питания, выполненный с возможностью взаимодействия по радиоканалу с системой спутниковой навигации и с ретранслятором для информационного обмена с аппаратно-программным комплексом централизованной системы автоблокировки, при включении питания коллективный переносимый сигнализатор в режиме реального времени от системы спутниковой навигации получает информацию о географических координатах своего местоположения и преобразует их в номер рельсовой цепи в зоне своего местонахождения, а по данным аппаратно-программного комплекса централизованной системы автоблокировки – информацию о номерах занимаемых подвижным составом рельсовых цепей на перегоне, автоматически сопоставляет полученную информацию и при приближении на заданное расстояние подвижного состава к рельсовой цепи, на которой он расположен, формирует и воспроизводит сигналы оповещения в виде соответствующих звуковых и оптических сигналов, при наличии на месте выполнения работ препятствия для движения подвижного состава коллективный переносимый сигнализатор для ограждения места проведения работ по команде руководителя работ передает по радиоканалу через ретранслятор и межстанционную линию связи соответствующее сообщение в аппаратно-программный комплекс централизованной системы автоблокировки, который автоматически формирует и передает команды по системе сигнализации для остановки подвижного состава до его подхода к месту работ посредством автоматической локомотивной сигнализации или закрытия выходного светофора, а также формирует и передает коллективному переносимому сигнализатору сообщение о выполнении команды ограждения места проведения работ по межстанционной линии связи через ретранслятор по радиоканалу.
2. Способ по п. 1, отличающийся тем, что при отсутствии приближающегося подвижного состава коллективный переносимый сигнализатор формирует и воспроизводит контрольные звуковые и оптические сигналы.
3. Способ по п. 2, отличающийся тем, что коллективный переносимый сигнализатор дешифрирует поступающие от аппаратно-программного комплекса централизованной системы автоблокировки сообщения и формирует на их основе сигналы контроля или оповещения в двух идентичных трактах, а воспроизведение сигналов контроля или оповещения осуществляет только при условии идентичности сигналов на выходе обоих трактов, а при их различии воспроизводит аварийный сигнал.
4. Способ по п. 3, отличающийся тем, что коллективный переносимый сигнализатор анализирует воспроизводимые звуковые сигналы контроля или оповещения и формирует сигналы подтверждения или сигналы аварии, которые передает по радиоканалу через ретранслятор и межстанционную линию связи в аппаратно-программный комплекс централизованной системы автоблокировки для информирования обслуживающего персонала, при этом сигналы аварии воспроизводят и в коллективном переносимом сигнализаторе в виде соответствующих звуковых и оптических сигналов.
5. Способ по п. 4, отличающийся тем, что поступающие сообщения об отсутствии или наличии препятствия для движения поездов на месте работ от коллективного переносимого сигнализатора на аппаратно-программный комплекс централизованной системы автоблокировки предварительно дешифрируют двумя идентичными дешифраторами и передают их в аппаратно-программный комплекс централизованной системы автоблокировки только при полной идентичности дешифрированных сообщений, а при их различии воспроизводят аварийный сигнал и предотвращают поступление сообщений в систему автоблокировки.
6. Способ по п. 5, отличающийся тем, что в коллективном переносимом сигнализаторе сигнал подтверждения об исполнении в автоблокировке команд остановки поезда или разрешения движения сравнивается с передаваемым сообщением о наличии или отсутствии препятствия для движения поездов и при их несоответствии воспроизводится аварийная сигнализация.
7. Способ по любому из пп. 1 и 6, отличающийся тем, что руководитель работ снабжен переносимым пультом управления и контроля, взаимодействующим с коллективным переносимым сигнализатором по радиоканалу.
| Система ограждения места работ и оповещения работающих на железнодорожном пути о приближении подвижного состава | 2020 |
|
RU2746627C1 |
| Способ автоматического оповещения работающих в железнодорожном тоннеле о приближении железнодорожного подвижного состава с ограждением места работ | 2021 |
|
RU2763069C1 |
| Способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ | 2019 |
|
RU2702379C1 |
| Способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ | 2019 |
|
RU2702368C1 |
| WO 2017015110 A1, 26.01.2017. | |||

