Изобретение относится к области железнодорожной автоматики, телемеханики и связи, и может быть использовано для автоматизированного оповещения работающих на железнодорожном пути о приближении железнодорожного подвижного состава с ограждением места работ.
Наиболее близким аналогом является известный способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ, заключающийся в том, что через ближайший к месту работ на перегоне пункт доступа межстанционной линии связи централизованной системы автоблокировки подключают ретранслятор с автономным источником питания, на месте работ устанавливают коллективный переносный сигнализатор с автономным источником питания, выполненный с возможностью взаимодействия по радиоканалу с системой спутниковой навигации и с ретранслятором для информационного обмена с аппаратно-программным комплексом централизованной системы автоблокировки, при включении питания коллективный переносный сигнализатор в режиме реального времени от системы спутниковой навигации получает информацию о географических координатах своего местоположения и преобразует их в номер рельсовой цепи в зоне своего местонахождения, а по данным аппаратно-программного комплекса централизованной системы автоблокировки – информацию о номерах занимаемых подвижным составом рельсовых цепей на перегоне, автоматически сопоставляет полученную информацию и при приближении на заданное расстояние подвижного состава к рельсовой цепи, на которой он расположен, формирует и воспроизводит сигналы оповещения в виде соответствующих звуковых и оптических сигналов, при наличии на месте выполнения работ препятствия для движения подвижного состава коллективный переносный сигнализатор для ограждения места проведения работ по команде руководителя работ передает по радиоканалу через ретранслятор и межстанционную линию связи соответствующее сообщение в аппаратно-программный комплекс централизованной системы автоблокировки, который автоматически формирует и передает команды по системе сигнализации для остановки подвижного состава до его подхода к месту работ посредством автоматической локомотивной сигнализации или закрытия выходного светофора, а также формирует и передает коллективному переносному сигнализатору сообщение о выполнении команды ограждения места проведения работ по межстанционной линии связи через ретранслятор по радиоканалу (RU 2763069 C1, B61L 23/06, 27.12.2021).
Однако, известный способ может использоваться только при взаимодействии с централизованной микропроцессорной автоблокировкой, в то время как большинство участков железных дорог Российской Федерации оборудованы числовой кодовой автоблокировкой с расположением оборудования на перегоне у каждой сигнальной точки.
Технический результат предлагаемого изобретения заключается в повышении надежности оповещения работающих на железнодорожном пути о приближении подвижного состава и ограждения места работ на участках железных дорог, оборудованных числовой кодовой автоблокировкой, в результате максимального исключения из этих процессов человеческого фактора.
Технический результат достигается тем, что в способе оповещения работающих на перегоне о приближении железнодорожного подвижного состава с ограждением места работ на станции размещают устройство контроля и управления, взаимодействующее посредством межстанционной линии связи с пунктами доступа на перегоне, каждый из которых соединен с соответствующей аппаратурой сигнальных точек числовой кодовой автоблокировки, к ближайшему к месту работ пункту доступа подключают ретранслятор с автономным источником питания, на месте работ устанавливают коллективный переносный сигнализатор с автономным источником питания, выполненный с возможностью взаимодействия по радиосвязи с навигационной спутниковой системой и с ретранслятором, при включении питания коллективный переносный сигнализатор получает в режиме реального времени от системы спутниковой навигации информацию о географических координатах своего местоположения и преобразует их в номер блок-участка в зоне своего местоположения, а от устройство контроля и управления по данным сигнальных точек числовой кодовой автоблокировки – информацию о номерах занимаемых подвижным составом рельсовых цепей блок-участков на перегоне, автоматически сопоставляет полученную информацию и при приближении подвижного состава на заданное расстояние к блок-участку своего местоположения воспроизводит акустические и оптические сигналы оповещения, при наличии на месте работ препятствия для движения подвижного состава коллективный переносный сигнализатор по команде руководителя работ передает сообщение о наличии препятствия по радиоканалу через ретранслятор, пункт доступа и линию связи в устройство контроля и управления, которое при приеме сообщения о наличии препятствия передает команду аппаратуре сигнальной точке блок-участка нахождения места работ на включение красного огня на проходном светофоре и подачи в рельсовую цепь предыдущего блок-участка кода «КЖ», при получении которого автоматически аппаратура сигнальной точки предыдущего блок-участка включает на проходном светофоре желтый свет, а автоматическая локомотивная сигнализация воспроизводит в кабине машиниста локомотива сигнал, требующий остановки, при этом устройство контроля и управления формирует и передает сообщение о выполнении функции остановки подвижного состава коллективному переносному сигнализатору.
При получении сообщения о выполнении функции остановки подвижного состава коллективный переносный сигнализатор может осуществлять соответствующую световую сигнализацию.
При отсутствии препятствия на пути движения поездов коллективный переносный сигнализатор может формировать соответствующее сообщение, которое передает по радиоканалу через ретранслятор, пункт доступа и линию связи в устройство контроля и управления, и при получении от него отклика осуществлять соответствующую сигнализацию.
Причем при отсутствии или нахождении подвижного состава на расстоянии от места работ, превышающем заданное для воспроизведения оповещения, коллективный переносный сигнализатор воспроизводит звуковые и оптические контрольные сигналы.
Предлагаемый способ реализуется системой автоматизированного оповещения работающих на железнодорожном пути о приближении подвижного состава и ограждения места работ на перегоне железной дороги, оборудованном числовой кодовой автоблокировкой
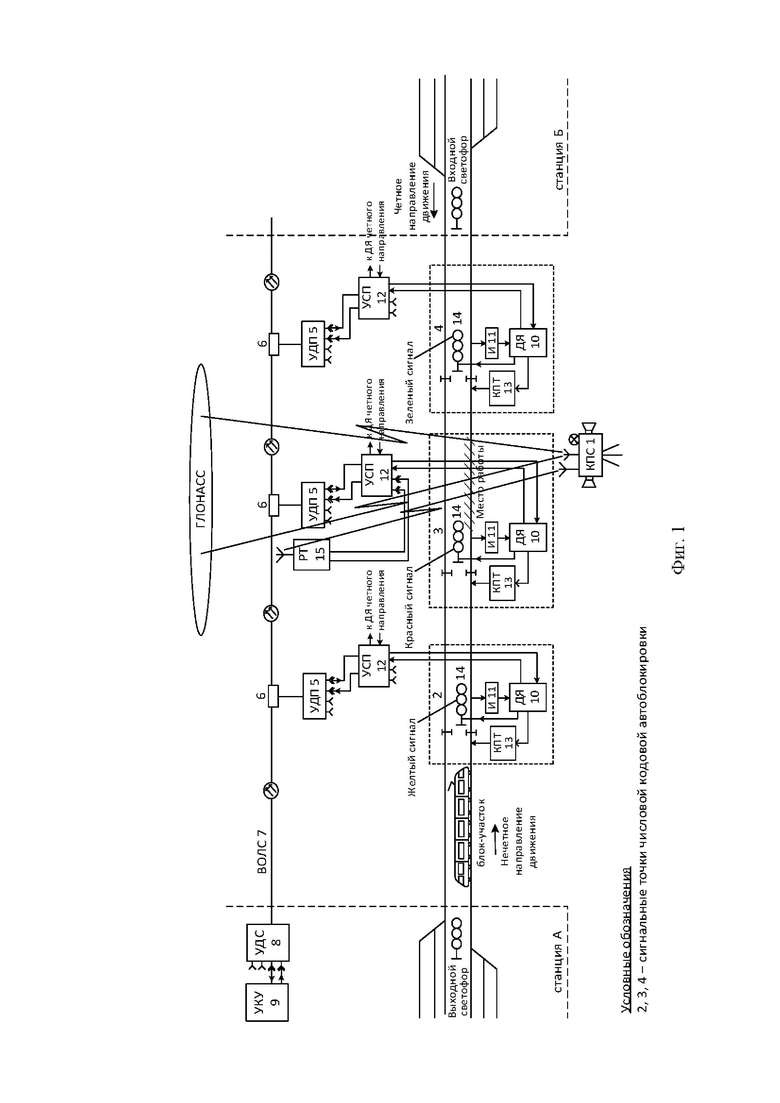
Сущность предлагаемого изобретения поясняется чертежами фиг.1 и 2. На фиг. 1 представлена структурная схема системы автоматизированного оповещения работающих на железнодорожном пути о приближении подвижного состава и ограждения места работ на перегоне железной дороги, оборудованном числовой кодовой автоблокировкой, на фиг.2- представлена структурная схема коллективного переносного сигнализатора (КПС).
Система содержит КПС 1 с автономным источником питания, расположенный на месте работ, размещенные у каждой сигнальной точки 2, 3, 4 числовой кодовой автоблокировки перегонные устройства 5 доступа (УДП 5), подключенные с помощью сплиттеров 6 к жилам волоконно-оптического кабеля 7 связи (ВОЛС 7), соединенным на станции А со станционным устройством 8 доступа (УДС 8), к входу/выходу которого подключено устройство 9 контроля и управления (УКУ 9).
Ячейка 10 дешифрации (ДЯ 10) каждой сигнальной точки 2, 3, 4 числовой кодовой автоблокировки соединена с путевым реле 11(И 11), подключенным к рельсовой цепи соответствующего блок-участка, и с устройством 12 сопряжения перегонным (УСП 12), а также с кодовым трансмиттером 13, подключенным к рельсовой цепи, и проходному светофору 14.
К УСП 12 подключены входы/выходы УДП 5 и ретранслятора 15 (РТ 15), взаимодействующего по радиосвязи с КПС 1.
КПС 1 содержит приемопередатчик 16, выполненный с возможностью взаимодействия по радиоканалу с ретранслятором РТ 15 и соединенный входом/выходом контроллера 17, к одному из выходов которого подключен формирователь 18 контрольных сигналов и сигнала оповещения, ко входу которого подключен преобразователь 19 географических координат в номера блок-участков, входом подключенный к выходу навигационного приемника 20.
Один из выходов формирователя 18 подключен ко входу усилителя 21, нагруженного на громкоговоритель 22, а другой выход - оптическому излучателю 23.
Вход контроллера 17 подключен к выходу формирователя 24 сообщений о наличии (отсутствии) препятствия для движения поездов на месте работ, включение которого осуществляется с помощью тумблера 25. Формирователь 24 входом соединен с со вторым выходом преобразователя 19 информация о номере блок-участка, в зоне которого расположен КПС-1. Второй выход контроллера 17 соединен с приемником 26 подтверждения исполнения в сигнальной точке переданного сообщения, к выходу которого подключен оптический индикатор 27. К третьему выходу контроллера 17 подключена цепь управления режимом прием/передача приемопередатчика 16.
Электропитание коллективного переносного сигнализатора КПС-1 осуществляется от автономного источника питания (аккумулятора, на фиг. 2 не показан).
Способ оповещения работающих на железнодорожном пути о приближении подвижного состава с ограждением места работ на перегоне, оборудованном числовой кодовой автоблокировкой, реализуется следующим образом.
Сообщение о занятости или свободности рельсовой цепи блок-участка поступает от дешифраторной ячейки 10 каждой сигнальной точки через устройство 12 сопряжения перегонное на вход устройства 5 доступа перегонного, подключенного через сплиттер 6 к соответствующей жиле ВОЛС 7, соединенной с устройством 8 доступа станционным, к выходу которого подключено устройство 9 контроля и управления, формирующее пакеты информации о состоянии блок-участков перегона в четном и нечетном направлении и передающее их через УДС 8, ВОЛС 7, сплитттер 6 и УДП-5 на вход ретранслятора РТ 15, с выхода которого по радиосвязи на приемопередатчик 16 КПС-1, к выходу которого подключен котроллер 17, передающий информацию на формирователь 18 сигналов контроля и оповещения.
Навигационный приемник 20 в режиме реального времени определяет географические координаты местоположения КПС 1, данные о которых передает в преобразователь 19. Преобразователь 19 осуществляет преобразование географических координат местоположения КПС 1 в номер блок-участка местоположения работ. Данные о номере блок-участка местоположения КПС-1, а, следовательно, и местоположения работ поступают на другой вход формирователя 18.
В результате автоматического сопоставления номеров блок-участков, занимаемых подвижным составом и номера блок-участка местоположения работ с учетом максимальной разрешенной скорости движения поездов на данном участке железной дороги, протяженности блок-участков и заданного времени от момента начала оповещения до подхода подвижного состава к месту работ, формирователь 18 подает на вход усилителя 21 и на оптический излучатель 23 либо контрольные сигналы (при нахождении подвижного состава вне расчетной зоны), либо сигнал оповещения, воспроизводимый громкоговорителем 21 и излучателем 22.
При отсутствии на месте работ препятствия для движения поездов формирователь 24 периодически посылает через контроллер 17 и приемопередатчик 16 по радиосвязи в РТ 15 соответствующее сообщение. РТ 15 полученное сообщение передает через устройство 12 сопряжения перегонное, устройство 5 доступа перегонное, сплиттер 6 по ВОЛС 7 на устройство 8 доступа станционное, с выхода которого переданное сообщение поступает на вход устройства 9 контроля и управления. При приеме сообщения, информирующего об отсутствии на месте работ препятствия для движения поездов, УКУ 9 формирует и передает через УДС 8, ВОЛС-9, сплиттер 6, УСП 5 в дешифраторную ячейку 10 сигнальной точки 3, в пределах блок-участка котором находится КПС-1, команду, свидетельствующую об отсутствии препятствия, при приеме которой в сигнальной точке 3 не происходит каких-либо действий.
Одновременно эта команда через устройство УСП 12 поступает на вход РТ 15, который по радиоканалу передает ее в приемопередатчик 16, с выхода которого через контроллер 17 принятая команда поступает на вход приемника 26 подтверждения исполнения сообщений КПС-1, сигнализируя индикатором 27 исполнение функции, инициируемой сообщением, поступившим в УКУ 9 от КПС-1.
При наличии на месте работ препятствия для движения поездов руководитель работ включает тумблером 25 формирователь сообщений о препятствии в режим периодической передачи соответствующего сообщения приемопередатчиком 16 по радиоканалу на ретранслятор 15. РТ 15 полученное сообщение о наличие препятствия передает через устройство 12 сопряжения перегонное, устройство 5 доступа перегонное, сплиттер 6 по ВОЛС7 на устройство 8 доступа станционное, с выхода которого переданное сообщение поступает на вход устройства 9 контроля и управления, при приеме которого УКУ 9 формирует и передает через УДС 8, ВОЛС-9, сплиттер 6, УДП 5 и УСП 12 в дешифраторную ячейку 10 сигнальной точки 3, в пределах блок-участка которой находится КПС 1, команду, свидетельствующую о препятствии для движения поездов.
При приеме дешифраторной ячейкой 10 указанной команды на проходном светофоре 14 сигнальной точки 3 включается красный огонь, в рельсовую цепь предыдущего блок-участка кодовый трансмиттер 13 передает код «КЖ». В сигнальной ячейке 2 предыдущего блок-участка при приеме кода «КЖ» реле 11 дает команду дешифраторной ячейке 10 включить на проходном светофоре 14 желтый огонь, а принятый системой автоматической локомотивной сигнализации (АЛС) код «КЖ» вызывает появление на локомотиве поезда сигнала, требующего остановки.
Одновременно эта команда через устройство УСП 12 поступает на вход РТ 15, который по радиоканалу передает ее в приемопередатчик 16, с выхода которого через контроллер 17 принятая команда поступает на вход приемника 26 подтверждения исполнения сообщений КПС-1, подтверждая исполнение функции остановки поезда, индицируемое индикатором 27.
После устранения препятствия на месте работ, руководитель работ с помощью тумблера 25 переводит формирователь 24 в режим формирования соответствующего сообщения, информирующего об отсутствии препятствия, которое периодически передает через контроллер 17 и приемопередатчик 16 по радиосвязи в РТ 15. РТ 15 полученное сообщение передает через устройство 12 сопряжения перегонное, устройство 5 доступа перегонное, сплиттер 6 по ВОЛС7 на устройство 8 доступа станционное, с выхода которого переданное сообщение поступает на вход устройства 9 контроля и управления. При приеме сообщения, информирующего об отсутствии на месте работ препятствия для движения поездов, УКУ 9 формирует и передает через УДС 8, ВОЛС 7, сплиттер 6, УДП 5 и УСП 12 в дешифраторную ячейку 10 сигнальной точки 3, в пределах блок-участка которой находится КПС-1, команду, свидетельствующую об отсутствии препятствия.
При приеме дешифраторной ячейкой 10 указанной команды на проходном светофоре 14 сигнальной точки 3 включается зеленый огонь, в рельсовую цепь предыдущего блок-участка поступает код «З», в результате чего на его проходном светофоре предыдущего блок-участка включается зеленый огонь, а по системе АЛС в кабину машиниста локомотива поступает сигнал, разрешающий движение.
Одновременно на КПС-1 через подключенный к УСП 12 ретранслятор 15 по радиоканалу поступает сигнал подтверждения исполнения функции разрешения движения, инициирующий включение сигнализации 27.
Для оповещения работающих на железнодорожном пути и ограждения места работ в четном направлении движения используется аналогичный способ (на фиг.1 не показан).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оповещения работающих на перегоне о приближении железнодорожного подвижного состава с ограждением места работ | 2022 |
|
RU2780241C1 |
| Способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ | 2019 |
|
RU2702368C1 |
| Способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ | 2019 |
|
RU2702379C1 |
| Способ автоматического оповещения работающих в железнодорожном тоннеле о приближении железнодорожного подвижного состава с ограждением места работ | 2021 |
|
RU2763069C1 |
| Система ограждения места работ и оповещения работающих на железнодорожном пути о приближении подвижного состава | 2020 |
|
RU2746627C1 |
| Система оповещения о приближении подвижного состава, ограждения места работ и технологической радиосвязи путевой машины | 2020 |
|
RU2749681C1 |
| Система оповещения работающих на перегоне о приближении подвижного состава с ограждением места проведения работ | 2019 |
|
RU2725327C1 |
| СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОГО ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ | 2021 |
|
RU2773550C1 |
| Способ ограждения места проведения работ и оповещения работающих на железнодорожных путях | 2017 |
|
RU2655566C1 |
| Автоматизированная система ограждения места работ по текущему содержанию железнодорожного пути с оповещением работающих о приближении подвижного состава без использования сигналистов (СОРБИС-М1) | 2020 |
|
RU2733452C1 |

Изобретение относится к средствам автоматизированного оповещения путевых рабочих о приближении железнодорожного подвижного состава и ограждения места работ. Способ основан на использовании на месте работ коллективного переносного сигнализатора, определяющего свое местоположение по навигационной сети ГЛОНАСС и получающего информацию по радио или радиопроводной связи о местоположении подвижного состава от числовой кодовой автоблокировки с децентрализованным размещением аппаратуры, в частности с расположением оборудования на перегоне у каждой сигнальной точки, используют систему доступа, организованную по волоконно-оптической линии связи. Достигается повышение надежности оповещения. 3 з.п. ф-лы, 2 ил.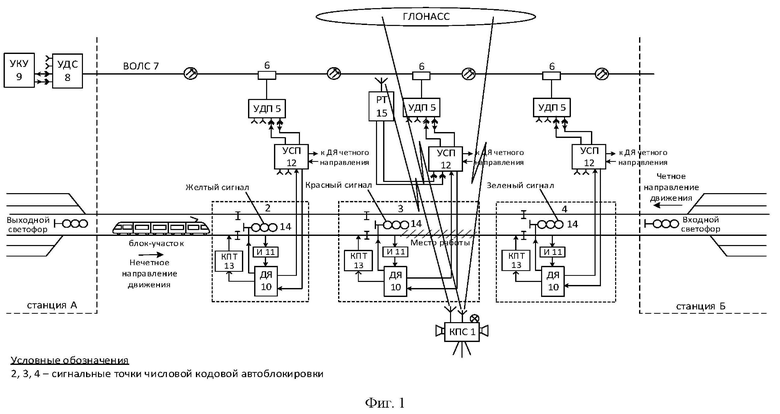
1. Способ оповещения работающих на железнодорожном пути перегона о приближении подвижного состава с ограждением места работ, заключающийся в том, что на станции размещают устройство контроля и управления, взаимодействующее посредством межстанционной линии связи с пунктами доступа на перегоне, каждый из которых соединен с соответствующей аппаратурой сигнальных точек числовой кодовой автоблокировки, к ближайшему к месту работ пункту доступа подключают ретранслятор с автономным источником питания, на месте работ устанавливают коллективный переносный сигнализатор с автономным источником питания, выполненный с возможностью взаимодействия по радиосвязи с навигационной спутниковой системой и с ретранслятором для информационного обмена с устройством контроля и управления, при включении питания коллективный переносный сигнализатор получает в режиме реального времени от системы спутниковой навигации информацию о географических координатах своего местоположения и преобразует их в номер блок-участка в зоне своего местоположения, а от устройство контроля и управления по данным сигнальных точек числовой кодовой автоблокировки – информацию о номерах занимаемых подвижным составом рельсовых цепей блок-участков на перегоне, автоматически сопоставляет полученную информацию и при приближении подвижного состава на заданное расстояние к блок-участку своего местоположения воспроизводит акустические и оптические сигналы оповещения, при наличии на месте работ препятствия для движения подвижного состава коллективный переносный сигнализатор по команде руководителя работ передает сообщение о наличии препятствия по радиоканалу через ретранслятор, пункт доступа и линию связи в устройство управления и контроля, который при приеме сообщения о наличии препятствия передает команду аппаратуре сигнальной точке блок-участка нахождения места работ на включение красного огня на проходном светофоре и подачи в рельсовую цепь предыдущего блок-участка кода «КЖ», при получении которого автоматически аппаратура сигнальной точки предыдущего блок-участка включает на проходном светофоре желтый свет, а автоматическая локомотивная сигнализация воспроизводит в кабине машиниста локомотива сигнал, требующий остановки, при этом устройство контроля и управления формирует и передает сообщение о выполнении функции остановки подвижного состава коллективному переносному сигнализатору.
2. Способ по п. 1, отличающийся тем, что при получении сообщения о выполнении функции остановки подвижного состава коллективный переносный сигнализатор осуществляет соответствующую световую сигнализацию.
3. Способ по любому из пп. 1, 2, отличающийся тем, что при отсутствии препятствия на пути движения поездов коллективный переносный сигнализатор формирует соответствующее сообщение, которое передает по радиоканалу через ретранслятор, пункт доступа и линию связи в устройство контроля и управления, и при получении от него отклика осуществляет соответствующую сигнализацию.
4. Способ по п. 3, отличающийся тем, что при отсутствии или нахождении подвижного состава на расстоянии от места работ, превышающем заданное для воспроизведения оповещения, коллективный переносный сигнализатор воспроизводит звуковые и оптические контрольные сигналы.
| Способ оповещения работающих на перегоне о приближении железнодорожного подвижного состава с ограждением места работ | 2022 |
|
RU2780241C1 |
| Способ автоматического оповещения работающих в железнодорожном тоннеле о приближении железнодорожного подвижного состава с ограждением места работ | 2021 |
|
RU2763069C1 |
| Система ограждения места работ и оповещения работающих на железнодорожном пути о приближении подвижного состава | 2020 |
|
RU2746627C1 |
| Способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ | 2019 |
|
RU2702368C1 |
| Способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ | 2019 |
|
RU2702379C1 |
| СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОГО ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ | 2021 |
|
RU2773550C1 |
| WO 2017015110 A1, 26.01.2017. | |||

