Изобретение относится к медицинской технике, а именно, к экзоскелетам и может быть использовано для поддержания тела человека и снижения физической нагрузки на человека в положении «Стоя» длительное время.
Известны экзоскелеты поддержки тела человека и снижения физической нагрузки [1. RU №2565101 С1 от 09.12.2014. 2. RU №194544 U1 от 16.09.2019]. Недостатками известных аналогов является отсутствие возможности перехода между режимами максимальной маневренности и максимальной разгрузки человека.
Наиболее близким к заявляемому устройству является экзоскелет, описанный в патенте России RU №2565101 С1 от 09.12.2014, содержащий силовой каркас, который включает в себя опорную раму с шарнирами, в которых закреплены опорные стойки, состоящие из тазобедренных, коленных и голеностопных звеньев, систему управления и исполнительный механизм в виде электропневматической системы.
Недостатками экзоскелета являются низкая маневренность, сложность и большая масса конструкции, требующая значительных энергозатрат.
Задача изобретения - снижение нагрузки на мышцы и скелет человека при длительном нахождении в стоячем положении с грузом или без него и обеспечение высокой мобильности.
Технический результат достигается за счет того, что в экзоскелете, содержащем опорную раму с шарнирами, в которых закреплены опорные стойки, состоящие из тазобедренных, коленных и голеностопных звеньев, систему управления и исполнительный механизм, опорные стойки экзоскелета выполнены с возможностью перехода из состояния максимальной жесткости в состояние максимальной гибкости и обратно и включают в себя набор сегментных элементов, соединенных жгутом, электропривод и упорный подшипник, при этом каждая опорная стойка (состоящая из «голени» и «бедра» с расположенным между ними «суставом») представляет собой сегментную конструкцию, состоящую из сегментных элементов, выполненных из композиционного материала и соединенных шарнирно, каждый сегментный элемент представляет собой цилиндрическую деталь со сквозным отверстием, через которое пропускают жгут, состоящий из высокопрочных скручиваемых и раскручиваемых нитей, имеющую с одной стороны конусообразную головку, а с другой стороны - внутренний конусообразный паз для размещения конусообразной головки следующего сегментного элемента, то есть для сочленения соседних сегментных элементов.
При натяжении жгута сегментные элементы входят в жесткий контакт друг с другом, чем достигается максимальная жесткость конструкции экзоскелета. При заданном ослаблении жгута степень жесткости конструкции уменьшается, что дает возможность пользователю двигаться в заданном направлении и маневрировать.
При приведении экзоскелета в рабочее состояние часть вертикальной нагрузки на человека воспринимается конструкцией экзоскелета. При переводе экзоскелета в нерабочее положение человек получает возможность передвигаться с максимальной маневренностью.
Экзоскелет представляет собой силовой каркас, включающий в себя голеностопное опорное звено с шарниром, на котором закреплены две опорных стойки («голень» и «бедро»), два коленных узла (крепления к ногам пользователя) и два тазобедренных звена с электроприводом. Опорная стойка выполнена с возможностью изменения своей жесткости и гибкости, что достигается благодаря сегментной конструкции стержня со жгутом в сердечнике, обеспечивающим изменение жесткости конструкции путем его натяжения (при скручивании нитей) и расслабления (при раскручивании нитей).
Изобретение иллюстрируется чертежами:
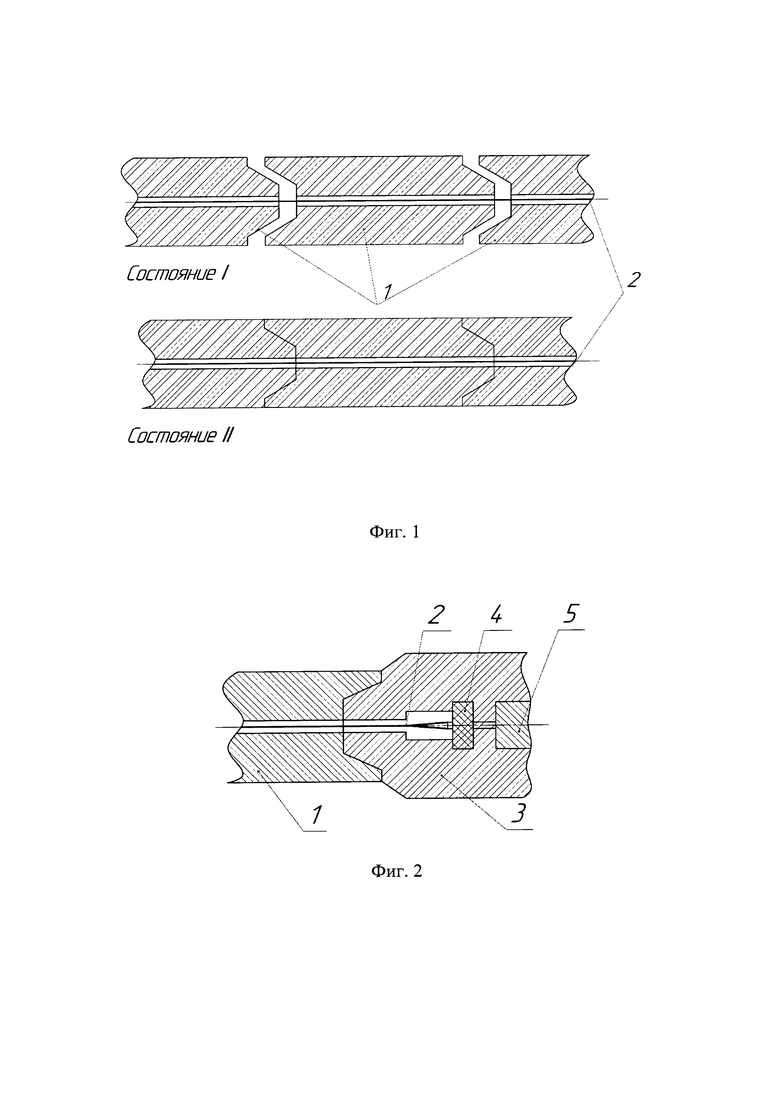
фиг. 1 - сегментные элементы опорного звена экзоскелета;
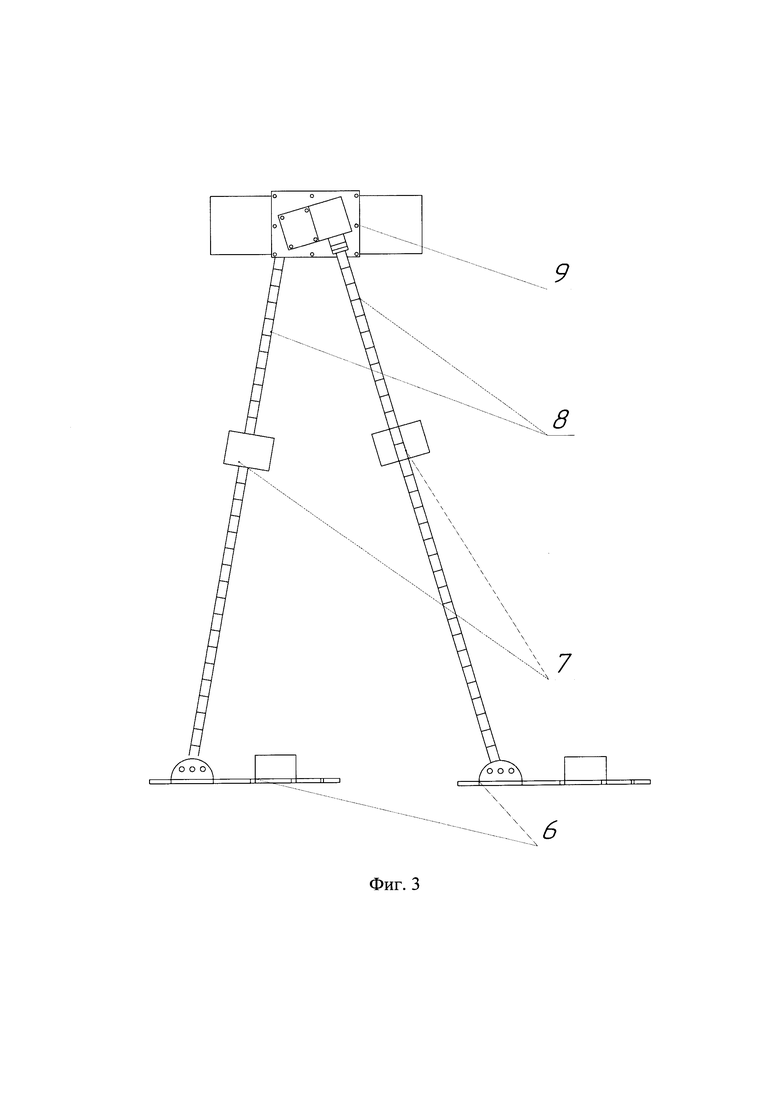
фиг. 2 - механизм натяжения троса опорного стержня;
фиг. 3 - экзоскелет с изменяемой жесткостью.
На фиг. 1-3 использованы следующие обозначения: состояние I - нерабочее состояние экзоскелета: трос ослаблен, сегменты не стянуты, жесткость минимальна; состояние II - рабочее состояние экзоскелета: трос натянут, сегментные элементы стянуты, жесткость максимальна; 1 - сегментные элементы экзоскелета; 2 - жгут; 3 - корпус электропривода; 4 - упорный подшипник; 5 - электропривод; 6 - голеностопное звено; 7 - коленное звено; 8 - опорное звено (опорная стойка); 9 - шаровой шарнир,
- при этом сегментные элементы 1 последовательно соединены друг с другом конусообразной головкой с одной стороны, а с другой стороны - внутренним конусообразным пазом для размещения конусообразной головки следующего сегментного элемента, то есть для сочленения соседних сегментных элементов, через ось симметрии сегментных элементов протянут жгут 2, соединяющий их в одну цепь; в верхней части конструкции цепь закрепляют на корпусе электропривода 3, имеющего конический выход, совмещающийся с сегментным элементом 1. Жгут 2 закрепляют на втулке электропривода (на фиг. 1-3 не показана). С противоположной стороны (в нижней части конструкции) цепь закрепляют на шаровом шарнире 9, передающем нагрузки на голеностопное звено. Коленное звено 7 выполнено в виде тканого пояса, представляет собой узел крепления к ноге пользователя и предназначено для ограничения свободного хода сегментных опорных стоек 8. В корпусе 3 электропривода располагают электрический двигатель 5, на оси которого закреплена втулка (на фиг. 1-3 не показана), опирающаяся на упорный подшипник (на фиг. 1-3 не показан) и служащая для скручивания/раскручивания жгута. Электропривод представляет собой электродвигатель с редуктором.
Заявляемое устройство работает следующим образом. Шаровой шарнир 9, расположенный на поясе, фиксируется поясным ремнем на талии человека, коленное звено 7 фиксируется ремнем над коленом, голеностопное звено 6 надевается на ступню пользователя и фиксируется на ней. В случае если человеку необходимо длительное время находиться в положении «Стоя» с грузом или налегке, производится включение электропривода 5, который производит натяжение жгута 2, стягивающего сегменты 1, в результате чего жесткость конструкции опорного звена 8 достигает максимального значения, обеспечиваемого профилем сечения и прочностными свойствами композиционного материала, из которого изготовлены сегментные элементы конструкции. При этом подвижность пользователя значительно снижается - движение при активированном состоянии экзоскелета (неподвижный режим) сильно ограничено. При переключении экзоскелета в подвижный режим происходит обратный ход электропривода 5 и расслабление жгута 2, в результате чего опорные стойки теряют жесткость благодаря своей сегментной конструкции. В подвижном режиме пользователь без стеснения движений получает возможность изменить свое положение, перемещаться и маневрировать.
Технический результат заключается в снижении нагрузки на мышцы и скелет человека при длительном нахождении в стоячем положении с грузом или без него и в обеспечении высокой мобильности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2665116C1 |
| ЭКЗОСКЕЛЕТ С ЭЛЕКТРОПНЕВМАТИЧЕСКОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2014 |
|
RU2565101C1 |
| ГРУЗОВОЙ ПАССИВНЫЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2018 |
|
RU2725288C2 |
| ПНЕВМАТИЧЕСКИЙ ЭКЗОСКЕЛЕТ | 2020 |
|
RU2747593C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| ЭКЗОСКЕЛЕТ | 2014 |
|
RU2567589C1 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ, СПИННОЙ КАРДАННЫЙ УЗЕЛ И КОЛЬЦЕВОЙ КАРДАН ГРУЗОВОГО ЭКЗОСКЕЛЕТА | 2014 |
|
RU2563209C2 |
| МЯГКИЙ МНОГОРЕЖИМНЫЙ ЭКЗОСКЕЛЕТ | 2022 |
|
RU2797688C1 |
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |
| Пассивный реабилитационный экзоскелет | 2017 |
|
RU2665386C1 |
Изобретение относится к медицине, а именно к экзоскелетам с изменяемой жесткостью. Экзоскелет содержит опорную раму с шарнирами, в которых закреплены опорные стойки, состоящие из тазобедренных, коленных и голеностопных звеньев, систему управления и исполнительный механизм. Опорные стойки экзоскелета выполнены с возможностью перехода из состояния максимальной жесткости в состояние максимальной гибкости и обратно и включают в себя набор сегментных элементов, соединенных жгутом, электропривод и упорный подшипник. Каждая опорная стойка представляет собой сегментную конструкцию, состоящую из сегментных элементов, выполненных из композиционного материала и соединенных шарнирно. Каждый сегментный элемент представляет собой цилиндрическую деталь со сквозным отверстием, через которое пропущен жгут, состоящий из нитей, выполненных с возможностью скручиваться и раскручиваться. С одной стороны цилиндрическая деталь имеет конусообразную головку, а с другой стороны – внутренний конусообразный паз для размещения конусообразной головки следующего сегментного элемента, то есть для сочленения соседних сегментных элементов. Электропривод выполнен с возможностью скручивать и раскручивать жгут. Коленное звено выполнено в виде крепления к ноге пользователя. Достигается возможность снижения нагрузки на мышцы и скелет человека при обеспечении высокой мобильности экзоскелета. 2 з.п. ф-лы, 3 ил.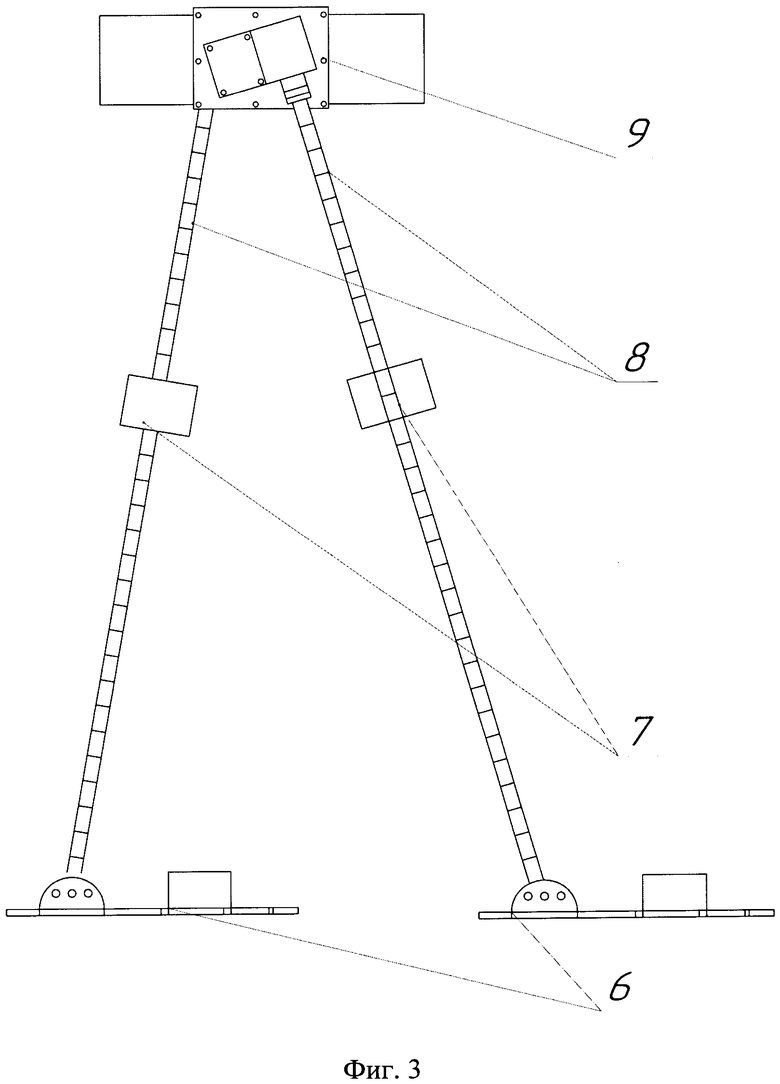
1. Экзоскелет с изменяемой жесткостью, содержащий опорную раму с шарнирами, в которых закреплены опорные стойки, состоящие из тазобедренных, коленных и голеностопных звеньев, систему управления и исполнительный механизм, отличающийся тем, что опорные стойки экзоскелета выполнены с возможностью перехода из состояния максимальной жесткости в состояние максимальной гибкости и обратно и включают в себя набор сегментных элементов, соединенных жгутом, электропривод и упорный подшипник, при этом каждая опорная стойка представляет собой сегментную конструкцию, состоящую из сегментных элементов, выполненных из композиционного материала и соединенных шарнирно, каждый сегментный элемент представляет собой цилиндрическую деталь со сквозным отверстием, через которое пропущен жгут, состоящий из нитей, выполненных с возможностью скручиваться и раскручиваться, имеющую с одной стороны конусообразную головку, а с другой стороны - внутренний конусообразный паз для размещения конусообразной головки следующего сегментного элемента, то есть для сочленения соседних сегментных элементов, при этом электропривод выполнен с возможностью скручивать и раскручивать жгут, а коленное звено выполнено в виде крепления к ноге пользователя.
2. Экзоскелет по п. 1, отличающийся тем, что при максимальном натяжении жгута сегментные элементы входят в жесткий контакт друг с другом, чем достигается максимальная жесткость конструкции экзоскелета.
3. Экзоскелет по п. 1, отличающийся тем, что при заданном ослаблении жгута степень жесткости конструкции экзоскелета уменьшается, что дает возможность пользователю двигаться в заданном направлении и маневрировать.
| DE 102018105549 A1, 12.09.2019 | |||
| ЭКЗОСКЕЛЕТ С ЭЛЕКТРОПНЕВМАТИЧЕСКОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2014 |
|
RU2565101C1 |
| KR 101875732 B1, 06.07.2018 | |||
| WO 2015088863 A2, 18.06.2015 | |||
| US 2014276264 A1, 18.09.2014. | |||

