Экзоскелет относится к области жизнеобеспечения человека. Экзоскелет предназначен для реабилитации людей с нарушенным опорно-двигательным аппаратом, и может найти военное применение и применение при ликвидации чрезвычайных ситуаций.
Известны экзоскелеты, реализующие идею разгрузки человека, содержащие каркас с элементами крепления к туловищу, рычаги, шарнирно соединенные между собой, например патенты РФ №№2116063, 2200529, 2110243, 2362598. Однако они не обеспечивают автономную ходьбу человека с нарушенным опорно-двигательным аппаратом.
Прототипом является экзоскелет инвалида, патент РФ №2493805, содержащий опорные стойки, башмаки, траверсу с шарниром на ее центральной части, в котором вращается ведущий вал, соединенный с мышечной системой, являющейся приводом. Однако его динамические характеристики низки, эксплуатационные возможности ограничены, например экзоскелет не может быть использован человеком, не имеющим ног.
Техническим результатом, на обеспечение которого направлено заявляемое техническое решение, является экзоскелет, позволяющий человеку снизить нагрузку на суставы и увеличить силу и выносливость, а при нарушении опорно-двигательного аппарата и при отсутствии ног ходить, садиться и вставать.
Экзоскелет содержит одетый на человека корсет, траверсу, вмонтированную в него, закрепленную на тазобедренной части, опирающуюся своими концами на составленные из звеньев опорные стойки, башмаки, связанные со стойками, шарниры и упорные подшипники, размещенные на траверсе и башмаках, в которых вращаются цапфы кривошипов, установленных на концах стоек, ведущий вал, вращающийся в установленном на траверсе шарнире, механизм синхронного поворота кривошипов, соединенный посредством рычагов с мышцами человека, являющимися приводом, и дополнительный привод с блоком питания. На верхних и нижних звеньях стоек размещены шарниры и упорные подшипники, в них вращаются шейки кривошипов, шейки между собой соединены гибкими валами, звенья стоек соединены посредством шарниров, снабженных механизмами поворота, которые соединены гибкими валами с помощью пульта управления с мышцами и дополнительным приводом, траверса с башмаками связана упругими муфтами и демпферами.
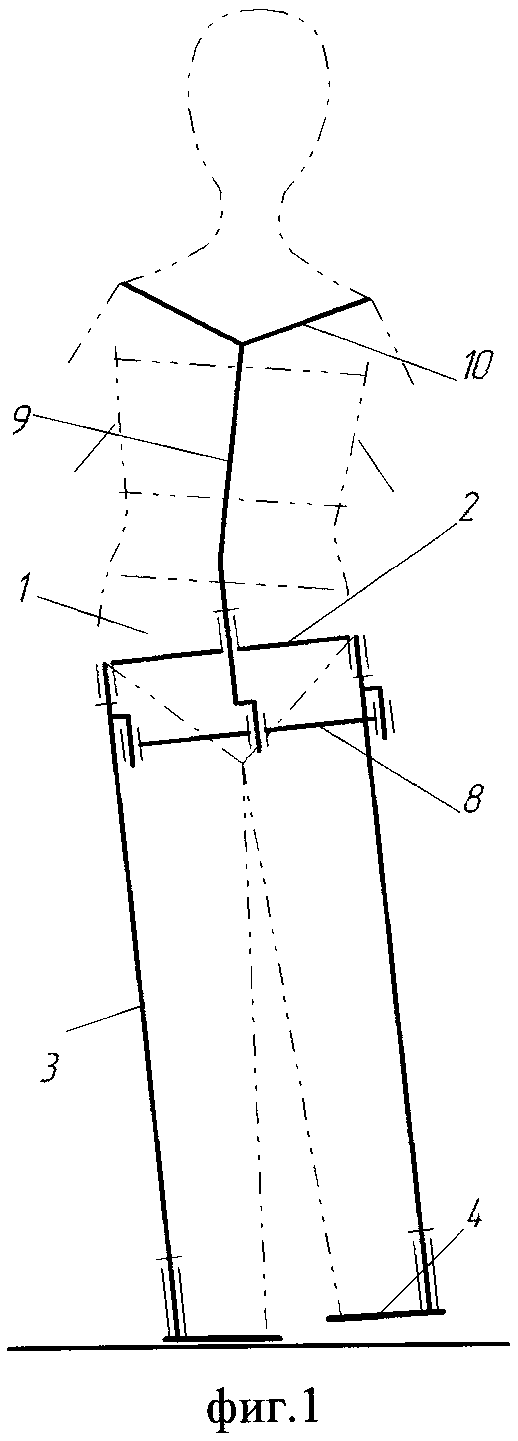
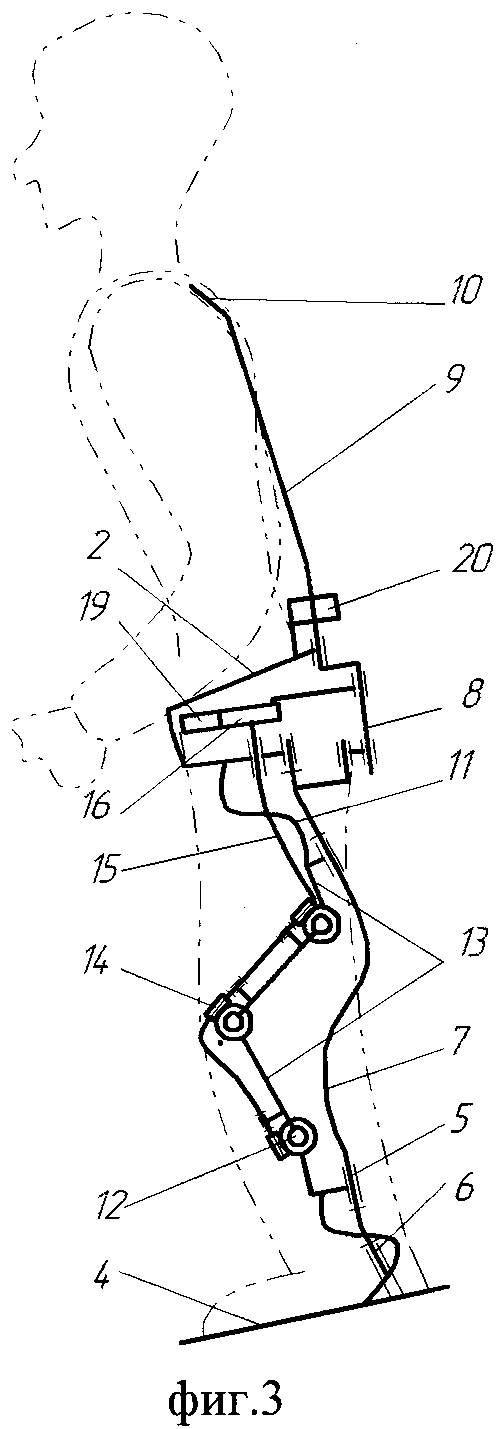
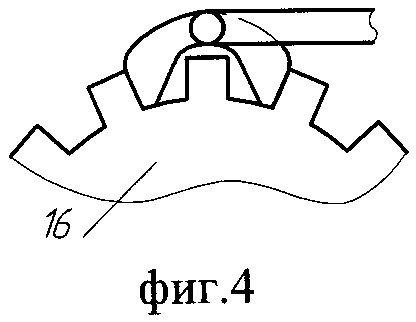
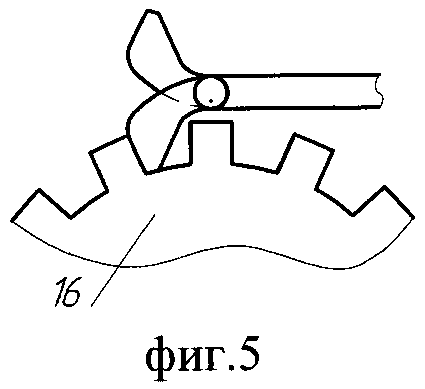
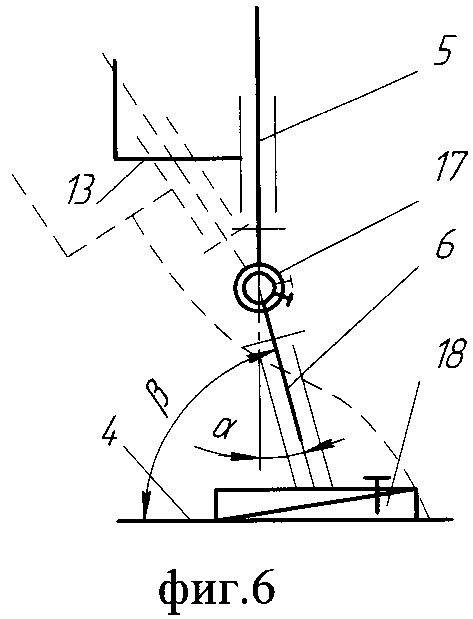
Изобретение поясняется чертежами, где: на фиг. 1 - вид сзади; на фиг. 2 - вид слева, опора на два башмака; на фиг. 3 - вид слева, фаза поднятой ноги; на фиг. 4 - схема храпового механизма при движении вперед; на фиг. 5 - схема храпового механизма при посадке и вставании; на фиг. 6 - схема установки кривошипов.
Обозначения на чертежах: корсет 1, траверса 2, опорная стойка 3, башмак 4, шейка кривошипа 5, цапфа кривошипа 6, гибкий вал кривошипов 7, параллелограммный механизм 8, ведущий вал 9, рычаг 10, упругая муфта с демпфером 11, сустав 12, звено стойки 13, червячный механизм 14, гибкий вал червячного механизма 15, храповой механизм 16, шарнир 17 со стопором, косая шайба 18 со стопором, пульт управления 19, силовой привод 20.
Экзоскелет содержит одетый на человека корсет 1, траверсу 2, вмонтированную в него, закрепленную на тазобедренной части, стойки 3, связанные с траверсой 2 и башмаками 4. На траверсе 2, на стойках 3 и на башмаках 4 установлены шарниры и упорные подшипники. В шарнирах и упорных подшипниках вращаются кривошипы с шейками 5 и цапфами 6. Шейки 5 кривошипов соединены между собой гибким валом 7, а цапфы 6 связаны посредством параллелограммного механизма синхронного поворота 8 с вращающимся в установленном на траверсе шарнире ведущим валом 9. Вал соединен, посредством рычагов 10, с мышечной системой человека. Траверса 2 со стойками 3 и башмаками 4 связана упругими муфтами с демпферами 11. Опорные стойки 3 снабжены суставами 12, включающими звенья 13. Звенья соединены последовательно друг с другом с помощью шарниров и снабжены поворотными механизмами со стопорами, например червячными механизмами 14. Червяки механизмов 14 соединены с помощью гибких валов 15 и храповых механизмов 16 с валом 9. Храповой механизм содержит храповик, жестко соединенный с гибким валом 15, две собачки, установленные встречно, соединенные с поводком, и тягу, связанную с валом 9. Звенья 13 связаны эластичной связью, посредством корсета 1, со стопами, с голенями и с бедрами человека. Длина стоек 3 регулируется и устанавливается в соответствии с необходимой нагрузкой ног при реабилитации. Шейки 5 с цапфами 6 соединены с помощью шарниров и снабжены механизмами поворота со стопорами 17. Шарниры и упорные подшипники на траверсе и башмаках установлены на косых шайбах, снабженных механизмами поворота со стопорами 18. Причем углы α между осями шеек 5 и цапф 6 в кривошипах, а также углы β при размещении шарниров и упорных подшипников на концах траверсы и на башмаках устанавливаются соответствующими комфорту и условиям движения человека. Во время движения эти установки выполняются с помощью поворотных механизмов, связанных гибкими валами с пультом управления 19. В пассивном экзоскелете приводом является мышечная система человека. В активном экзоскелете на траверсе 2 установлен соединенный с ведущим валом силовой привод 20 и блок питания.
В фазе опоры на оба башмака 4 сила тяжести, посредством траверсы 2, распределяется на составленные из соединенных с помощью шарниров звеньев 13 опорные стойки 3 и ноги человека. Звенья в шарнирах спрямлены и зафиксированы червячными механизмами 14 в положении, подобном положению голеностопного, коленного и тазобедренного суставов человека. Общий центр тяжести направлен вертикально между площадями опорных башмаков 4, горизонтальная составляющая сил при этом равна нулю. Пружины 11 занимают нейтральное положение. Положение человека устойчиво, и он с расслабленным состоянием мышц может стоять длительное время.
Фаза шага в пассивном экзоскелете начинается при появлении внутренней силы мышц туловища и плеч на рычагах 10. В активной форме экзоскелета включается дополнительный силовой привод 20, соединенный с ведущим валом 9. Вал 9 поворачивается в шарнире, установленном в центре траверсы 2. Цапфы 6 кривошипов посредством механизмов 8 синхронно с валом 9 вращаются в шарнирах и упорных подшипниках, установленных на концах траверсы 2 и башмаках 4. Шейки 5 кривошипов, соединенные гибким валом 7, вращаются в шарнирах и упорных подшипниках, установленных на концах стоек 3. Стойки описывают конические поверхности и, как образующие, при повороте меняют в пространстве направление угла наклона к опорной поверхности и башмакам 4. Изменяется положение опирающейся на стойки траверсы и связанной с ней тазобедренной части. При ходьбе человек поворачивает туловище и плечо, например левое, вперед. Траверса 2 наклоняется и поднимает правую стойку 3 вместе с башмаком 4 над опорой, а левый башмак остается на ней опорным. Вместе с траверсой изменяет положение тазобедренная часть, а корпус инвалида изгибается в сторону поворота плеча. Общий центр силы тяжести смещается влево и вперед, в площадь опоры левого башмака. При этом момент силы привода 20 в активном режиме понуждает мышцы сокращаться подобно сокращению мышц у здорового человека. Одновременно с поворотом вала 9 реверсивно вращаются гибкие валы 15, с установленными на них храповыми механизмами 16. Механизмы 16 снабжены храповиками, соединенными жестко валами 15, и двумя собачками на поводках, связанными с ведущим валом 9 посредством тяг. Собачки передают момент вращения храповикам и валам 15. Связанные с валами 15 червяки механизмов 14 вращаются, поворачивают звенья 13 в шарнирах и стопорят их. Связанный с правой стойкой башмак 4 поворачивается, отталкивается от опорной поверхности передней кромкой и способствует перемещению центра тяжести в площадь опоры левого башмака. В момент потери контакта передней кромки правого башмака с опорой экзоскелет опирается стойкой только на шарнир и упорный подшипник левого башмака. Система приобретает неустойчивость и под действием момента горизонтальной составляющей силы тяжести и внутренних сил, подобно циркулю, поворачивается в шарнире и упорном подшипнике относительно левого опорного башмака, преодолевая силы трения. Пружины 11, связывающие башмаки со стойками и траверсой, во время поворота закручиваются, но малая величина их жесткости не оказывает существенного противодействия процессу поворота экзоскелета. Они лишь ориентируют башмаки относительно направления движения при поднятом их положении. Правый башмак поднимается над опорой, смещается вперед и затем опускается на нее, удерживаясь в нейтральном положении муфтами и демпферами 11. Вновь экзоскелет, опираясь на оба башмака 4, переходит в фазу устойчивого состояния. Начинается новая фаза шага левой ногой. Динамические характеристики меняются по желанию человека. Для этого изменяется взаимное положение косых шайб с помощью механизмов со стопорами 18, и взаимное положение шеек 5 и цапф 6 кривошипов с помощью механизмов со стопорами 17. Такие действия приводят к изменению углов α и β. Изменяя установочные углы α и β, а также амплитуду поворота мышечной системы, соответствующую амплитуде углов поворота кривошипов, и амплитуду поворота в суставах 12 звеньев 13, изменяя частоту привода, человек меняет походку.
Подъем по ступеням лестницы происходит следующим образом. В пассивном и активном экзоскелете, как и при ходьбе, под влиянием сил мышц и привода 20 поворачивается вал 9 и связанные с ним посредством параллелограммного механизма 8 и гибкого вала 7 цапфы 6 кривошипов. Углы наклона опорных стоек к поверхностям башмаков, и траверсы изменяются и один из башмаков поднимается над опорной ступенью. Одновременно поворачиваются связанные с валом 9 посредством храповых механизмов 16 гибкие валы 15 и червяки механизмов 14, что приводит к повороту звеньев 13 в шарнирах экзосуставов 12. Суммарное воздействие складывающихся в экзосуставах звеньев 13 и поворачивающихся кривошипов с шейками 5 и цапфами 6 доводит башмак до уровня ступени. После чего начинается циркульный поворот экзоскелета и проскальзывание башмака по поверхности ступени верхнего уровня. Теперь башмаки 4 располагаются на ступенях разных уровней, а положение экзоскелета соответствует фазе устойчивой опоры башмаков на две ступени и готовности к подъему другого башмака на следующую ступень. С этой целью человек новым сокращением мышц и приводом 20 выполняет реверс вала 9.
Спуск происходит подобным образом. Находясь обеими башмаками 3 на верхней ступени, человек усилием мышц и привода 20 приподнимает один из них. Как при ходьбе по ровной поверхности башмак сдвигается к краю ступени и теряет с ней контакт. После этого происходит реверс поворота плеч и туловища и привода 20, при котором мышечная система удерживает экзоскелет от неуправляемого движения вперед. Одновременно поворачиваются гибкие валы 15. Суммарное воздействие поворачивающихся стоек и складывающихся в суставах звеньев доводит башмак до уровня нижней ступени. Экзоскелет приобретает устойчивость и готовность к дальнейшему спуску.
Путем изменения длины составных опорных стоек 2 человек имеет возможность садиться и вставать. Для этого одну из собачек храпового механизма выводят из зацепления, в результате чего храповик приобретает возможность одностороннего ступенчатого поворота. Человек реверсивное усилие мышц и привода 20 направляет на складывание или спрямление звеньев 13 в экзосуставах 12. Человек садится или встает.
Пассивный и активный экзоскелет дает возможность человеку с нарушенным опорно-двигательным аппаратом, используя внутренние силы мышц туловища и плеч, а также дополнительного привода реверсивного вращения ходить по улице, спускаться и подниматься по лестнице, садиться и вставать. Причем сокращение мышц похоже на сокращение мышц при ходьбе здорового человека. Включение дополнительного привода создает условия, при которых происходит принудительное сокращение мышц, способствующее реабилитации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКЗОСКЕЛЕТОН ИНВАЛИДА | 2012 |
|
RU2493805C1 |
| ПНЕВМАТИЧЕСКИЙ ЭКЗОСКЕЛЕТ | 2020 |
|
RU2747593C1 |
| Экзоскелет | 2021 |
|
RU2760527C1 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ, СПИННОЙ КАРДАННЫЙ УЗЕЛ И КОЛЬЦЕВОЙ КАРДАН ГРУЗОВОГО ЭКЗОСКЕЛЕТА | 2014 |
|
RU2563209C2 |
| ГРУЗОВОЙ ПАССИВНЫЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2018 |
|
RU2725288C2 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| ЭКЗОСКЕЛЕТ С ИЗМЕНЯЕМОЙ ЖЁСТКОСТЬЮ | 2021 |
|
RU2780275C1 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2665116C1 |
| ЭКЗОПОЗВОНОЧНИК ГИБКИЙ ДЛЯ РЕАБИЛИТАЦИИ | 2022 |
|
RU2805805C1 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ ЧЕЛОВЕКУ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНЫХ ФУНКЦИЙ (ВАРИАНТЫ) | 2015 |
|
RU2658481C2 |
Изобретение относится к медицине. Экзоскелет содержит одетый на человека корсет, траверсу, вмонтированную в него, закрепленную на тазобедренной части, опирающуюся своими концами на составленные из звеньев опорные стойки, башмаки, связанные со стойками, шарниры и упорные подшипники, размещенные на траверсе и башмаках, в которых вращаются цапфы кривошипов, установленных на концах стоек, ведущий вал, вращающийся в установленном на траверсе шарнире, механизм синхронного поворота кривошипов, соединенный посредством рычагов с мышцами человека, являющимися приводом, и дополнительный привод с блоком питания. На верхних и нижних звеньях стоек размещены шарниры и упорные подшипники, в них вращаются шейки кривошипов. Шейки кривошипов между собой соединены гибкими валами. Звенья стоек соединены посредством шарниров, снабженных механизмами поворота, которые соединены гибкими валами с помощью пульта управления с мышцами и дополнительным приводом. Траверса с башмаками связана упругими муфтами и демпферами. Изобретение обеспечивает возможность снижения нагрузки на суставы и увеличения силы и выносливости, а при нарушении опорно-двигательного аппарата и при отсутствии ног ходить, садиться и вставать. 6 ил.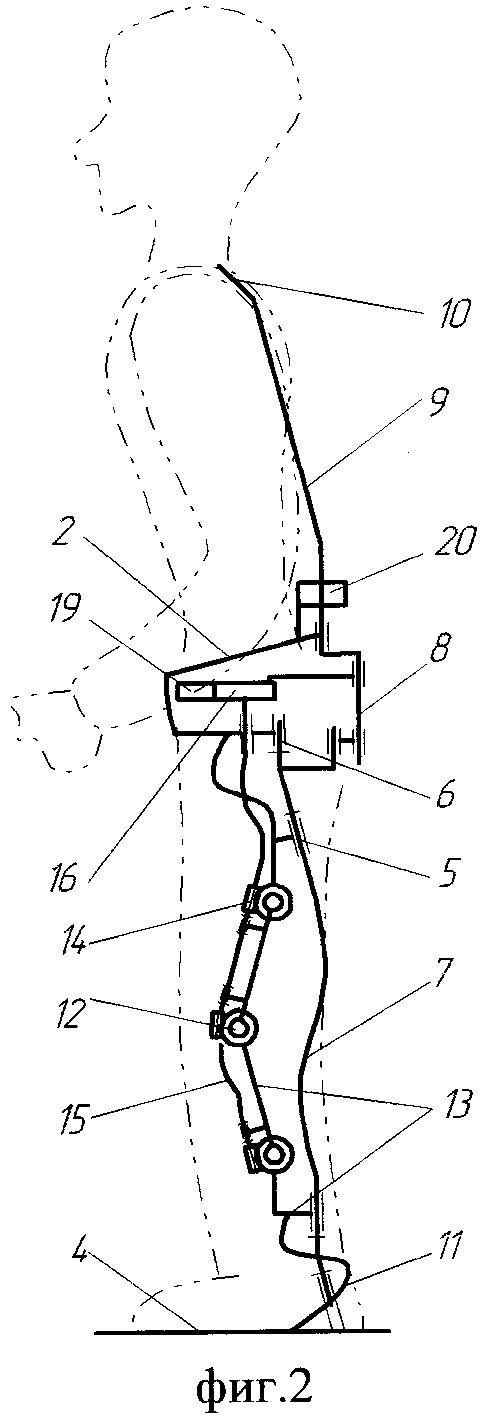
Экзоскелет, содержащий одетый на человека корсет, траверсу, вмонтированную в него, закрепленную на тазобедренной части, опирающуюся своими концами на составленные из звеньев опорные стойки, башмаки, связанные со стойками, шарниры и упорные подшипники, размещенные на траверсе и башмаках, в которых вращаются цапфы кривошипов, установленных на концах стоек, ведущий вал, вращающийся в установленном на траверсе шарнире, механизм синхронного поворота кривошипов, соединенный посредством рычагов с мышцами человека, являющимися приводом, и дополнительный привод с блоком питания, отличающийся тем, что на верхних и нижних звеньях стоек размещены шарниры и упорные подшипники, в них вращаются шейки кривошипов, шейки между собой соединены гибкими валами, звенья стоек соединены посредством шарниров, снабженных механизмами поворота, которые соединены гибкими валами с помощью пульта управления с мышцами и дополнительным приводом, траверса с башмаками связана упругими муфтами и демпферами.
| ЭКЗОСКЕЛЕТОН ИНВАЛИДА | 2012 |
|
RU2493805C1 |

