Изобретение относится к медицине, а именно к мягким экзоскелетам для реабилитации пользователей, страдающих частичной или полной потерей функциональности опорно-двигательного аппарата и/или дефицитом подвижности.
Известен пневматический экзоскелет с самоактивируемым пневмоаккумулятором, состоящим из воздухонепроницаемой оболочки [Патент RU №2747593, МПК А61Н 3/00, 2021 г.]. Экзоскелет состоит из неголономных шарниров, жестких опорных стоек и крепежных ремней. Пневмоаккумулятор рассчитан на сохранение пневматической энергии для привода движения и выполнен в виде рюкзака для удобства эксплуатации.
Недостатки аналога: экзоскелет ограничивает движения пользователя за счет использования цилиндрических шарниров, имитирующих суставы с тремя степенями свободы (для бедренного и голеностопного сустава), что может вызывать неудобства при использовании экзоскелета для реабилитации пользователей с частично пораженным опорно-двигательным аппаратом, крепления опорных стоек посредством ремней в месте контакта с кожей пользователя могут создавать болевые ощущения, поскольку эффективная площадь распределения нагрузки мала.
Известен экзоскелет, содержащий неподвижные блоки, встроенные в подвижные конструкции бедер, голеней и ступней, поворачивающиеся посредством подвижного троса, проходящего через них и прикрепленного к двум подвижным блокам, связанным с приводом [патент RU №2734565, МПК А61Н 3/00, А63В 23/00, А63В 23/035 и др., 2020 г.]. При таком устройстве экзоскелета снижается нагрузка на приводные двигатели, осуществляющие движение системы «человек-экзоскелет».
Недостатки аналога: экзоскелет ограничивает движения пользователя за счет использования цилиндрических шарниров, имитирующих суставы с тремя степенями свободы (для бедренного и голеностопного сустава), что может вызывать неудобства при использовании экзоскелета для реабилитации пользователей с частично пораженным опорно-двигательным аппаратом, использование системы подвижных и неподвижных блоков увеличивает общий вес экзоскелета, что приводит к необходимости приложения существенных усилий для его перемещения, а также негативно влияет на автономность экзоскелета.
Известен трехслойный мягкий экзоскелет, осуществляющий поддержку спины и бедер пользователя при наклонах и поднятии берда вверх при ходьбе [патент США №10926123, МПК А63В 21/00, А61Н 1/02, А61Н 3/00 и др., 2018 г.]. Первый слой, слой непосредственного контакта с пользователем, выполнен в виде нескольких эластичных элементов, прилегающих к телу пользователя и связанных между собой попарно, второй стабилизирующий слой необходим для поддержки движений человека при режиме пассивного экзоскелета, третий силовой слой состоит из нескольких кабелей, исполняющих роль привода движения бедра, приводных двигателей, питания и системы управления.
Недостатки аналога: наличие в конструкции мягкого экзоскелета элементов постоянной жесткости накладывает ограничения на общую подвижность пользователя и может вызывать мозоли и болевые ощущения в местах их контакта с пользователем при долгой эксплуатации, экзоскелет осуществляет активный привод движения только тазобедренного сустава и только в сагиттальной плоскости.
Наиболее близким к предлагаемому изобретению по технической сущности является гибкий экзоскелет, состоящий из трех слоев: слоя контакта с пользователем, силового слоя и внешней защитной оболочки, [патент США №10906168, МПК B25J 9/00, B25J 9/16, B25J 9/10, F16D 28/00,2018 г.].
Указанный гибкий экзоскелет может быть сконфигурирован для увеличения физической силы и/или выносливости пользователя, для обучения пользователя выполнению определенных физических задач, и в некоторых конфигурациях способен хранить данные о физической активности пользователя.
Недостатком прототипа является невозможность автоматического поддержания равновесия системы человек-экзоскелет при использовании для пользователями с нарушениями опорно-двигательного аппарата, связанная с особенностью схемного решения, и ограниченность привода движений сагиттальной плоскостью.
Задачи изобретения - осуществление движения тазобедренного и голеностопного суставов в трех плоскостях, снижение веса экзоскелета, автоматическая поддержка равновесия системы «человек-экзоскелет» при осуществлении заданных движений, возможность экзоскелетного устройства работать в нескольких режимах нагружения.
Технический результат - расширение функциональных возможностей, что, в частности, означает увеличение подвижности пользователей во время использования экзоскелета, повышение комфорта эксплуатации экзоскелета для целей реабилитации опорно-двигательного аппарата у пользователей с полной и частичной потерей двигательной способности.
Указанные задачи решаются, а технический результат достигается тем, что в предложенном мягком многорежимном экзоскелете, содержащем внутренний слой, выполненный с возможностью прилегания к телу пользователя, представленный в виде гибкого костюма, выполненного с возможностью ношения по меньшей мере на части тела пользователя, силовой слой с эластичными элементами, соединенными с гибким костюмом, поверх которых расположен внешний защитный слой, согласно изобретению. гибкий костюм, выполненный с возможностью прилегания к телу пользователя, выполнен в виде сплошной оболочки без разрывов и с возможностью охвата тела пользователя по меньшей мере от уровня восьмого ребра и до кончиков пальцев ног, в гибком костюме размещены встроенные гофры в местах сгиба суставов, а эластичные элементы силового слоя выполнены каждый в виде кабеля переменной жесткости, причем на каждом тазобедренном и голеностопном суставе размещено, по меньшей мере, шесть эластичных элементов переменной жесткости, крепление эластичных элементов тазобедренного сустава размещено выше талии пользователя, а внешний слой выполнен в виде эластичной оболочки.
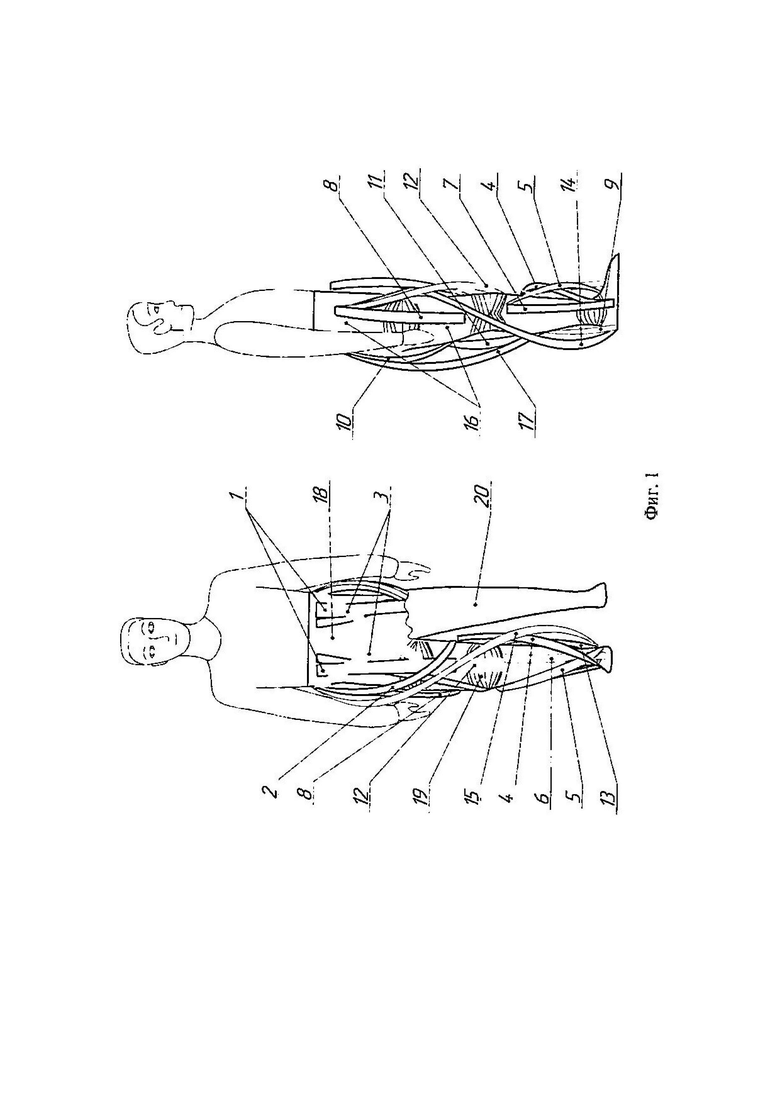
Существо изобретения поясняется чертежом. На чертеже изображена функциональная схема в двух проекциях (во фронтальной и сагиттальной плоскости) крепления эластичных элементов к гибкому костюму мягкого многорежимного экзоскелета.
Мягкий многорежимный экзоскелет состоит из силового слоя, состоящего по меньшей мере из семнадцати пар эластичных элементов переменной жесткости 1-17, прикрепленных к внутреннему слою, выполненному в виде гибкого костюма 18, содержащего гофры 19 в местах сгибов мягкого многорежимного экзоскелета и в непосредственной близости к суставам пользователя. Причем крепления пары эластичных элементов 1 расположены выше талии пользователя на прямой мышце живота и на прямой мышце бедра, крепления пары 2 расположены на наружных косых мышцах и на полуперепончатой и/или тонкой мышце бедра, крепления пары 3 расположены на наружных косых мышцах и подвздошно-берцовом тракте так, чтобы пара переплеталась крест-накрест, крепления пары 4 расположены на полуперепончатой мышце и на мышце, отводящей мизинец стопы, крепления пары 5 расположены на подвздошно-берцовом тракте на уровне коленного сустава и на мышце, отводящей большой палец стопы, крепления пары 6 расположены под коленной чашечкой и на подъеме стопы, крепления пары 7 расположены на подвздошно-берцовом тракте на уровне коленного сустава и на мышце, отводящей мизинец стопы, крепления пары 8 расположены на наружных косых мышцах и на подвздошно-берцовом тракте на уровне выше коленного сустава, крепления пары 9 расположены на икроножной мышце и на пятке, крепления пары 10 расположены на широчайшей мышце спины и на полусухожильной мышце, крепления пары 11 расположены на двуглавой мышце бедра и икроножной мышце, крепления пары 12 расположены на прямой мышце бедра и на передней большеберцовой кости, крепления пары 13 расположены на икроножной мышце с внутренней стороны и на мышце, отводящей большой палец стопы, крепления пары 14 расположены на прямой мышце живота и на пятке, крепления пары 15 расположены на наружных косых мышцах и мышце, отводящей большой палец стопы, крепления пары 16 расположены наружных косых мышцах и на подвздошно-берцовом тракте на уровне выше коленного сустава так, так, чтобы пара переплеталась крест-накрест, крепления пары 17 на широчайшей мышце спины и икроножной мышце. Эластичные элементы силового слоя могут управляться бортовой системой управления, которая может располагаться, например, на пояснице (на схеме не показана). Поверх обвязки эластичных элементов переменной жесткости, формирующих силовой слой, расположен защитный слой 20, выполненный в виде эластичной оболочки.
Мягкий многорежимный экзоскелет работает следующим образом. В начальный момент времени, при отсутствии электрического сигнала от системы управления, эластичные элементы переменной жесткости эластичны и позволяют пользователю беспрепятственно надеть мягкий многорежимный экзоскелет. Для привода определенных движений, паттерны которых заранее запрограммированы в системе управления экзоскелетом, соответствующие пары эластичных элементов переменной жесткости сокращаются, растягиваются или становятся абсолютно жесткими. При сокращении эластичного элемента, места крепления его на гибком костюме стремятся навстречу друг к другу приводя в движение естественный шарнир сустава человека. Поддержание равновесия при движении достигается сокращением одной группы пар эластичных элементов и блокировкой движения другой, что регулируется программой, заранее описанной в системе управления на основе уже известных паттернов тех или иных движений. Например, в случае использования мягкого многорежимного экзоскелета пользователями, неспособными самостоятельно поддерживать равновесие, в положении стоя эластичные элементы становятся абсолютно жесткими, тем самым образуя жесткий каркас. Таким же образом может быть достигнута реализация нескольких режимов нагружения экзоскелета, то есть в случае здорового пользователя, передвигающегося самостоятельно, экзоскелет может действовать синхронно с его движениями, тем самым облегчая нагрузку, или же действовать асинхронно, для создания эффекта от физического нагружения.
Заявленный мягкий многорежимный экзоскелет обеспечивает увеличение подвижности пользователей во время использования экзоскелета за счет осуществления движения тазобедренного и голеностопного суставов в трех плоскостях, обеспечивает комфорт эксплуатации экзоскелета для целей реабилитации опорно-двигательного аппарата у пользователей с полной и частичной потерей двигательной способности за счет использования прилегающего к телу пользователя гибкого костюма, полностью покрывающего нижнюю часть тела пользователя и отсутствия металлического каркаса, а также за счет возможности внедрения программы автоматической поддержки равновесия системы «человек-экзоскелет» при осуществлении заданных движений. Преимуществом заявляемого мягкого многорежимного экзоскелета является возможность его использования как пользователями с частичной и полной потерей функциональности опорно-двигательного аппарата, так и здоровыми пользователями, например, для целей облегчения выполнения заданных задач или для поддержания в тонусе мышц ног за счет создания эффекта от физического нагружения. За счет увеличения эффективной площади соприкосновения экзоскелета с кожей пользователя и отсутствия в конструкции элементов постоянной жесткости риск возникновения мозолей и болевых ощущений при эксплуатации экзоскелета резко сокращается.
Изобретение относится к медицинской технике, а именно к мягкому многорежимному экзоскелету. Экзоскелет содержит внутренний слой, выполненный с возможностью прилегания к телу пользователя, представленный в виде гибкого костюма, выполненного с возможностью ношения на части тела пользователя. Экзоскелет имеет силовой слой с эластичными элементами, соединенными с гибким костюмом, поверх которых расположен внешний защитный слой. Гибкий костюм, выполненный с возможностью прилегания к телу пользователя, выполнен в виде сплошной оболочки без разрывов и с возможностью охвата тела пользователя от уровня восьмого ребра и до кончиков пальцев ног. В гибком костюме размещены встроенные гофры в местах сгиба суставов, а эластичные элементы силового слоя выполнены, каждый, в виде кабеля переменной жесткости. На каждом тазобедренном и голеностопном суставе размещено шесть эластичных элементов переменной жесткости. Крепление эластичных элементов тазобедренного сустава размещено выше талии пользователя, а внешний слой выполнен в виде эластичной оболочки. Технический результат - расширение функциональных возможностей, что, в частности, означает увеличение подвижности пользователей во время использования экзоскелета, повышение комфорта эксплуатации экзоскелета для целей реабилитации опорно-двигательного аппарата у пользователей с полной и частичной потерей двигательной способности. 1 ил.
Мягкий многорежимный экзоскелет, содержащий внутренний слой, выполненный с возможностью прилегания к телу пользователя, представленный в виде гибкого костюма, выполненного с возможностью ношения по меньшей мере на части тела пользователя, силовой слой с эластичными элементами, соединенными с гибким костюмом, поверх которых расположен внешний защитный слой,
отличающийся тем, что гибкий костюм, выполненный с возможностью прилегания к телу пользователя, выполнен в виде сплошной оболочки без разрывов и с возможностью охвата тела пользователя по меньшей мере от уровня восьмого ребра и до кончиков пальцев ног, в гибком костюме размещены встроенные гофры в местах сгиба суставов, а эластичные элементы силового слоя выполнены, каждый, в виде кабеля переменной жесткости, причем на каждом тазобедренном и голеностопном суставе размещено по меньшей мере шесть эластичных элементов переменной жесткости, крепление эластичных элементов тазобедренного сустава размещено выше талии пользователя, а внешний слой выполнен в виде эластичной оболочки.
| US 2016220438 A1, 04.08.2016 | |||
| EP 4054805 A1, 14.09.2022 | |||
| EP 3701927 B1, 22.06.2022 | |||
| EP 3157471 B1, 24.11.2021 | |||
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ, СПИННОЙ КАРДАННЫЙ УЗЕЛ И КОЛЬЦЕВОЙ КАРДАН ГРУЗОВОГО ЭКЗОСКЕЛЕТА | 2014 |
|
RU2563209C2 |
