Изобретение относится к горно-шахтной промышленности, в частности к электрогидравлической системе управления исполнительными механизмами проходческих комбайнов, и может быть использовано в различных электрогидравлических приводах.
Пропорциональный электрогидравлический распределитель непрямого действия предназначен для распределения и регулирования расхода рабочей жидкости в гидросистемах горнодобывающих машин.
Известны пропорциональные гидрораспределители с цилиндрическим золотником типа РГП [1]; 1РП644 [2]; типа KDG4V, KSDG4V [3]; типа S6UP [4]. Известны аналоги пропорционального распределителя непрямого действия D41FС OBE фирмы Parker [5], 4WRKE фирмы Rexroth Hydraulics [6]. Общим конструктивным признаком аналогичных устройств является организация управления пилотным распределителем с помощью пропорциональных магнитов, применяемых для обеспечения возвратно поступательных движений управляющего золотника. Следствием этого факта является значительное потребление гидрораспределителем электроэнергии, так как расход энергии происходит и в момент переключения золотника в требуемое положение, и в режиме его удержания в заданном положении. Мощность, потребляемая аналогами, составляет порядка 24 Вт и выше, а температура на внешней поверхности пропорциональных электромагнитов достигает 125°С, что ограничивает их применение во взрывозащищенном рудничном исполнении.
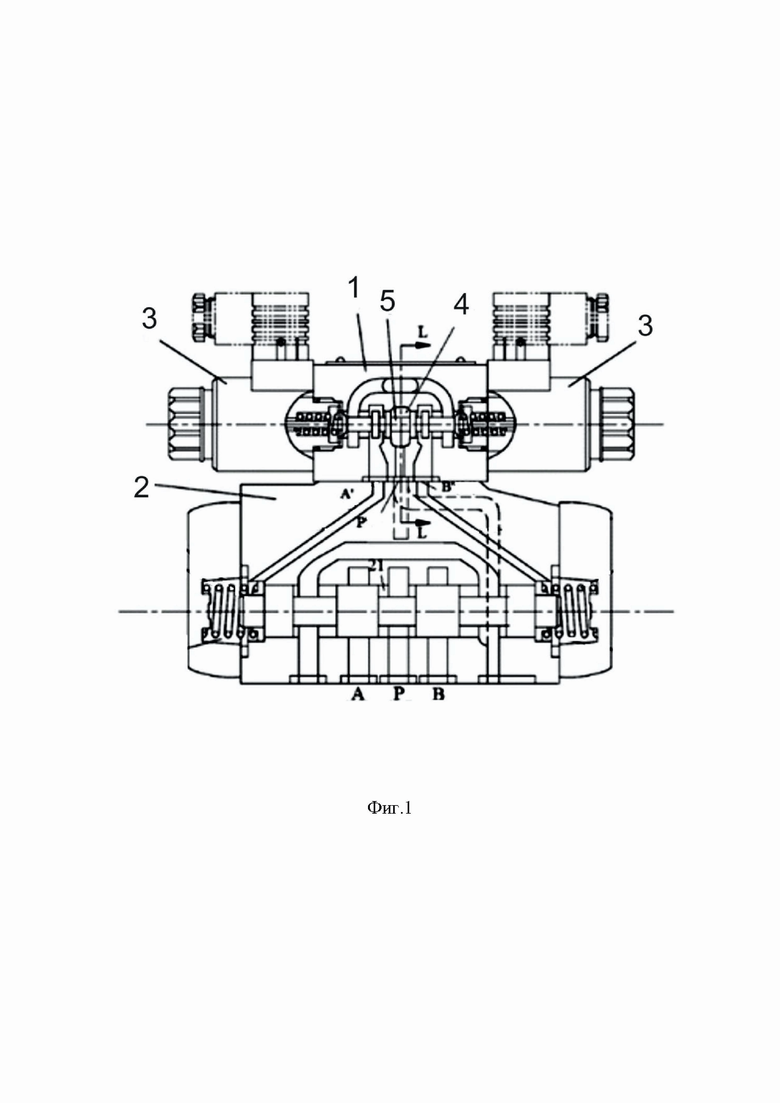
Наиболее близким к заявляемому устройству является гидрораспределитель фирмы Rexroth Hydraulics [7]. Электрогидравлический распределитель содержит управляющий пилотный реверсивный клапан 1 и управляемый им силовой реверсивный клапан 2. Оба клапана являются золотниковыми. Пилотный реверсивный клапан приводится в действие блоком электромагнитного управления 3, показанным на Фиг. 1 и включает в себя рабочую камеру 4 пилотного клапана, управляющий золотник 5, перемещаемый внутри пилотной рабочей камеры, и блок 3 электромагнитного управления на обоих концах пилотного золотника. Под управлением блока электромагнитного управления, пилотный золотник перемещается влево или вправо внутри пилотной рабочей камеры, так что вход реверсивного клапана пилотной ступени проходит через пилотную рабочую камеру на входе и соединительный порт с левой стороны. Путем управления положением главного золотника положение впускных и выпускных каналов для жидкости изменяется, тем самым управляя исполнительным механизмом в гидравлической системе.
Общими существенными признаками с заявляемым устройством является наличие управляющего электрического пилотного распределителя и управляемого силового распределителя золотникового типа.
Задачей данного изобретения является создание электрогидравлического гидрораспределителя для работы в гидросистемах горнодобывающих машин.
Техническим результатом является расширение арсенала пропорциональных электрогидравлических распределителей непрямого действия во взрывозащищенном рудничном исполнении, при одновременном снижении потребляемой мощности с сохранением габаритно присоединительных и весовых характеристик.
Технический результат достигается тем, что в пропорциональном электрогидравлическом распределителе непрямого действия, содержащем пилотный пропорциональный распределитель и силовой золотниковый четырехлинейный трехпозиционный гидрораспределитель, пилотный пропорциональный распределитель жестко свинчен через дроссельную плиту с регулируемыми дросселями с силовым золотниковым четырехлинейным трехпозиционным гидрораспределителем и состоит из гидравлического корпуса с запрессованной в него гильзой, поворотного золотника, зажатого с одной стороны крышкой с упором и с другой стороны через соединительную возвратную муфту, состоящую из рычага, подпружиненного с двух сторон возвратными пружинами и обеспечивающую возврат поворотного золотника в исходное нулевое положение, выходным валом гибридного шагового двигателя, предназначенного также для вращения поворотного золотника, и электронного устройства, установленного на гибридном шаговом двигателе и управляющего шаговым электродвигателем, состоящего из платы управления и датчика угла поворота золотника, при этом сливной канал пилотного пропорционального распределителя соединен с основным сливным каналом силового распределителя, а его адресные каналы соединены с управляющими каналами силового распределителя.
Для решения поставленной задачи в пропорциональном электрогидравлическом распределителе непрямого действия применен пилотный распределитель с центрированным золотником поворотного типа, для управления положением которого использован гибридный шаговый сервопривод, состоящий из гибридного шагового двигателя, платы управления и датчика угла поворота. Этот факт позволил снизить рассеиваемую электрическую мощность управления гидрораспределителя, снизить потребляемую мощность и ток при регулировании и удержании золотника. Помимо снижения потребляемой энергии при работе изделия и в процессе удержания механизма распределения потока жидкости в любом заданном положении, исключена необходимость в обратной связи, реализуемой обычно при помощи устройства отслеживания положения силового распределительного золотника.
Изобретение поясняется чертежами.
Фиг.1 - Электрогидравлический распределитель Rexroth Hydraulics (прототип).
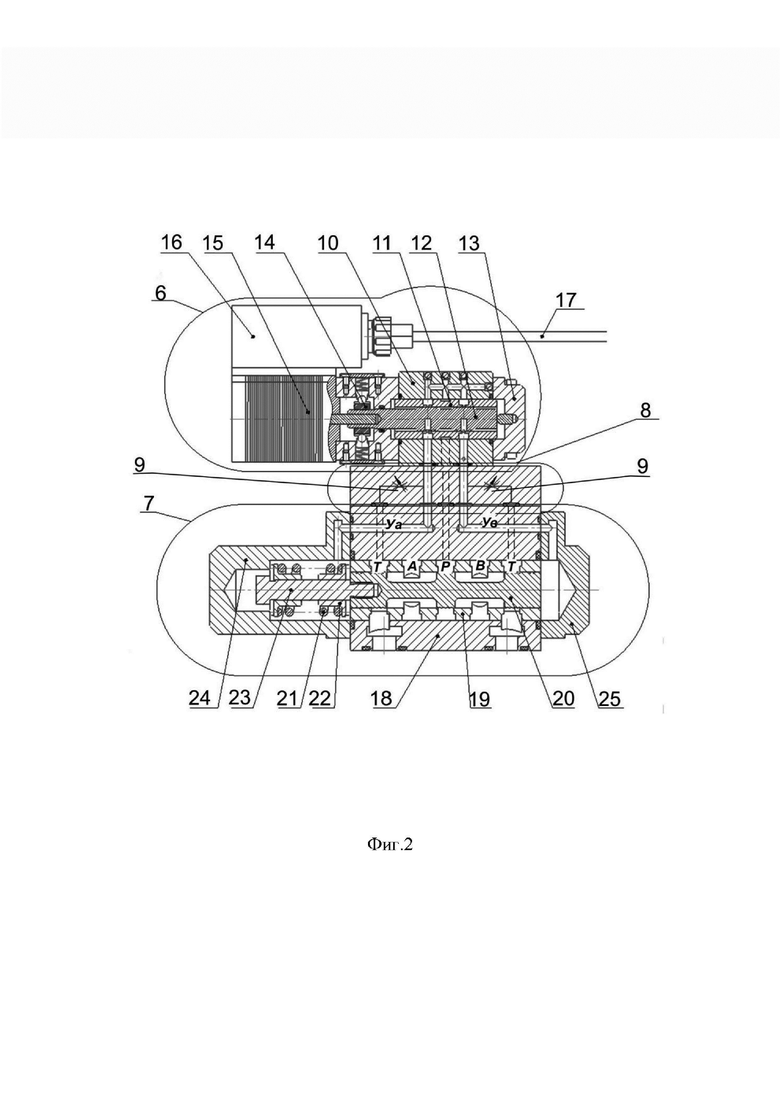
Фиг.2 - Пропорциональный электрогидравлический распределитель непрямого действия.
Фиг.3 - Гидравлическая принципиальная схема пропорционального электрогидравлического распределителя.
Заявляемый пропорциональный электрогидравлический распределитель состоит из пилотного пропорционального распределителя 6 с гибридным шаговым сервоприводом и силового золотникового четырехлинейного трехпозиционного распределителя 7 с гидравлическим управлением, которые жестко соединены между собой винтами через дроссельную плиту 8 с регулируемыми дросселями 9, 26 (Фиг. 2).
Пилотный пропорциональный распределитель 6 состоит из гидравлического корпуса 10 с запрессованной в него гильзой 11, поворотного золотника 12, зажатого с одной стороны крышкой с упором 13 и с другой стороны гибридным шаговым двигателем 14, выходной вал которого соединен с поворотным золотником 12 через соединительную возвратную муфту 14. Гибридный шаговый двигатель 15 управляется электронным устройством 16, состоящим из платы управления с драйвером шагового сервопривода и датчика угла поворота золотника 12, питающихся по кабельной перемычке 17. Возврат поворотного золотника 12 в исходное нулевое положение осуществляется возвратной муфтой 14, состоящей из рычага, подпружиненного с двух сторон возвратными пружинами.
Силовой распределитель 7 в свою очередь состоит из гидравлического корпуса 18 с запрессованной в него гильзой 19, золотника 20, предварительно поджатого в исходном положении возвратным пружинным блоком, состоящим из пружины 21, двух втулок 22 и винта 23. Пружинный блок зажат между крышкой 24 и торцом гильзы 19, обеспечивая одинаковую нагрузку при перемещении силового золотника 20 влево или вправо на одинаковую величину. Крышки 24 и 25 обеспечивают соединение управляющих полостей золотника 20 с управляющими каналами Уа и Ув пилотного пропорционального распределителя 6 и наружную герметизацию силового распределителя 7.
Плита 8 с установленными в нее регулируемыми дросселями 9, 26 (Фиг.2,3) предназначена для соединения напорного канала, управляющих каналов и сливного канала пилотного пропорционального распределителя 6 с соответствующими каналами силового распределителя 7 и создания требуемого давления в управляющих полостях Уа и Ув, необходимого для перемещения силового золотника 20 на заданную величину, для достижения необходимого расхода рабочей жидкости из соответствующего адресного канала А или В силового распределителя 7.
Гидравлическая принципиальная схема представлена на Фиг.3.
Устройство работает следующим образом. В корпусе 18 силового распределителя 7 имеются подводящий гидравлический канал рабочей жидкости Р (Фиг.2, 3), отводящий канал Т и два адресных канала А и В, разделенные между собой гильзой 19 и золотником 20 таким образом, что в исходном положении золотника 20 все каналы заблокированы между собой. В исходном положении золотник 20 удерживается пружиной 21. Одновременно рабочая жидкость из канала Р силового распределителя 7 через дроссель 26 (Фиг.3), расположенный в плите 3, поступает во входной канал пилотного пропорционального распределителя 6. Пилотный пропорциональный распределитель 6 также имеет сливной канал Т, соединенный основным сливным каналом Т силового распределителя 7 и адресные каналы УА и УВ соединенные с управляющими каналами силового распределителя 7. В исходном положении золотника 12, пилотного пропорционального распределителя, удерживаемого возвратной муфтой 14 каналы Т, УА и УВ заблокированы от напорной магистрали Р. Каналы УА и УВ соединенные со сливным каналом при этом управляющее давление в исходном положении поворотного золотника 12 отсутствует. При подаче соответствующего управляющего сигнала на устройство управления 16 шагового сервопривода, включающее драйвер управления и датчик угла поворота вала (золотника 12), происходит поворот вала гибридного шагового двигателя 15 и золотника 12 в соответствующее положение, при котором напорная линия Р соединяется через щелевой канал, образованный золотником 12 и гильзой 11 (Фиг. 2), с управляющим каналом Уа, или Ув. Образованная золотником 12 и гильзой 11 щель меняется в проходном сечении в зависимости от угла поворота золотника 12, тем самым увеличивая расход рабочей жидкости по соответствующему управляющему каналу УА или УВ. Чем больше угол поворота от нулевого положения золотника, тем больше расход рабочей жидкости приходится на соответствующий управляющий канал. Угол поворота золотника 12, как правило, ограничен в пределах ± 30о для реализации рычажного возвратного механизма муфты 14. При повороте золотника 12 рабочая жидкость начинает поступать в соответствующий управляющий канал, при этом второй управляющий канал соединен со сливом Т, а часть рабочей жидкости, поступающей в управляющий канал через дроссель 9, стравливается в слив Т, образуя перепад давления в управляющей полости силового золотника 12. Созданное управляющее давление действует на соответствующий торец силового золотника 12, смещая его на величину пропорционально управляющему давлению и изменяя проходное сечение между напорным каналом Р и соответствующим адресным каналом (А или В) силового распределителя 7, изменяя расход рабочей жидкости. Чем больше поворот золотника 12, тем выше давление в управляющей полости, а следовательно больше проходное сечение на силовом распределителе 7. Поворотный золотник 12 сцентрирован относительно кольцевого зазора, образованного между золотником 12 и гильзой 11, а также гидравлически разгружен, следовательно шаговый двигатель при повороте золотника преодолевает только усилие возвратной муфты 14.
В заявляемом решении для управления поворотным золотником 12, для его поворота и создания соответствующего управляющего давления в каналах УА и УВ силового распределителя, может быть применен гибридный шаговый двигатель типа FL42STH47-0806M с угловым шагом 0.9° (напряжение питания 24 В, максимальный потребляемый ток 0,8 А, максимальная потребляемая мощность 19,2 Вт, Фирма НПО АТОМ) мощностью порядка 15 Вт. Шаговый гибридный двигатель имеет низкое токопотребление в режиме удержания золотника в требуемом положении, не превышающее 30% от номинального рабочего тока. При управлении шаговым гибридным двигателем рабочий ток и ток удержания не изменяется во всем диапазоне регулирования расходом рабочей жидкости, в отличие от прототипа, в котором при управлении пропорциональными магнитами расходная характеристика гидроусилителя пропорциональна входному току электромагнита и для достижения больших расходных характеристик требуется больший ток. Диапазон поворота золотника пилотного пропорционального распределителя лежит, как правило, в пределах ±30°, что достаточно для создания управляющего давления в полостях УА и УВ и перемещения золотника силового гидрораспределителя 20 в соответствующее положение, которое удерживается пружиной 21 с одной стороны и управляющим давлением с другой стороны. В связи с применением гибридного шагового сервопривода, диапазон поворота пилотного золотника 12 на каждый адресный канал (А или В) разбивается на шаги согласно величине шага сервопривода и составляет 0,9°, что соответствует 33 позициям, в которых может находиться управляющий золотник 12, и обеспечивает точность регулирования в пределах 5%. Примененный шаговый гибридный сервопривод оптимизирован для работы с микрошагами, что дает возможность номинальный шаг сервопривода разбить на микрошаги и тем самым повысить точность позиционирования. В связи с применением шагового гибридного сервопривода и отработки шагов с заявленной точностью, а также в связи с применением тарированных золотников, изготовленных единых линейных и диаметральных размеров, использование обратной связи по положению силового золотника не является необходимым условием. Каждый шаг (угол поворота) гибридного шагового двигателя соответствует конкретному положению силового золотника в пределах заявленной точности, а следовательно, и расходной характеристики при одинаковых условиях рабочей жидкости.
Таким образом, заявляемое устройство существенно расширяет арсенал пропорциональных электрогидравлических распределителей непрямого действия во взрывозащищенном рудничном исполнении, при одновременном снижении потребляемой мощности с сохранением габаритно присоединительных и весовых характеристик.
Источники информации
1. Каталог выпускаемых изделий, 1998 г., ГСКТБ ГА, Гомель.
2. В.К. Свешников. Станочные гидроприводы, 1995 г., Москва.
3. В.К. Свешников. Гидрооборудование. Международный каталог, РИА, 1995 г.
4. Каталог "Proportional-, Regel- und Servoventil, Elektronik-Komponenten und System", фирма "Mannesman Rexroth", 1993 г.
5. Каталог HY11-3500/RU Гидравлика Parker. Пропорциональные гидрораспределители.
6. Каталог Rexroth (https://buyrexroth.com/).
7. CN110030219A, МПК F15B13/021, опубл.2019-07-19.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОПОРЦИОНАЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ РАСПРЕДЕЛИТЕЛЬ ПРЯМОГО ДЕЙСТВИЯ С КООРДИНАТНЫМ УПРАВЛЕНИЕМ | 2024 |
|
RU2828817C1 |
| ГИДРАВЛИЧЕСКИЙ РАСПРЕДЕЛИТЕЛЬ ДЛЯ МОРСКОЙ ВОДЫ | 2014 |
|
RU2555635C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
| ЧЕТЫРЕХСЕКЦИОННЫЙ ПОГРУЖНОЙ БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКОГО УПРАВЛЕНИЯ | 2022 |
|
RU2812560C1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
| ГИДРОСИСТЕМА МОБИЛЬНОЙ МАШИНЫ | 2004 |
|
RU2276237C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С ЭЛЕКТРОГИДРАВЛИЧЕСКИМ РАСПРЕДЕЛИТЕЛЕМ РАЗГРУЗКИ | 2011 |
|
RU2504696C2 |
| СЕМИСЕКЦИОННЫЙ ПОГРУЖНОЙ БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКОГО УПРАВЛЕНИЯ | 2022 |
|
RU2812561C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |

Изобретение относится к электрогидравлической системе управления исполнительными механизмами проходческих комбайнов. Техническим результатом является расширение арсенала пропорциональных электрогидравлических распределителей непрямого действия во взрывозащищенном рудничном исполнении, при одновременном снижении потребляемой мощности с сохранением габаритно присоединительных и весовых характеристик. Пропорциональный электрогидравлический распределитель непрямого действия содержит пилотный пропорциональный распределитель и силовой золотниковый четырехлинейный трехпозиционный гидрораспределитель. Пилотный пропорциональный распределитель жестко свинчен через дроссельную плиту с регулируемыми дросселями с силовым золотниковым четырехлинейным трехпозиционным гидрораспределителем. Пилотный пропорциональный распределитель состоит из гидравлического корпуса с запрессованной в него гильзой, поворотного золотника, зажатого с одной стороны крышкой с упором и с другой стороны через соединительную возвратную муфту. Возвратная муфта состоит из рычага, подпружиненного с двух сторон возвратными пружинами. Возвратная муфта обеспечивает возврат поворотного золотника в исходное нулевое положение. Также выходная муфта состоит из выходного вала гибридного шагового двигателя, предназначенного также для вращения поворотного золотника, и электронного устройства, установленного на гибридном шаговом двигателе и управляющего шаговым электродвигателем. Шаговый электродвигатель состоит из платы управления и датчика угла поворота золотника. Сливной канал пилотного пропорционального распределителя соединен с основным сливным каналом силового распределителя, а его адресные каналы соединены с управляющими каналами силового распределителя. 3 ил.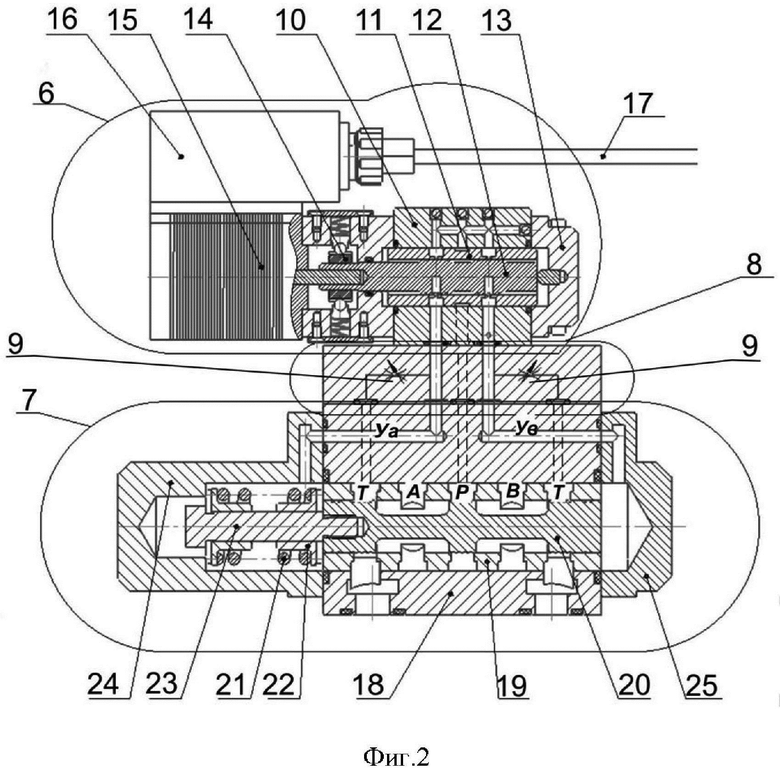
Пропорциональный электрогидравлический распределитель непрямого действия, содержащий пилотный пропорциональный распределитель и силовой золотниковый четырехлинейный трехпозиционный гидрораспределитель, отличающийся тем, что пилотный пропорциональный распределитель жестко свинчен через дроссельную плиту с регулируемыми дросселями с силовым золотниковым четырехлинейным трехпозиционным гидрораспределителем и состоит из гидравлического корпуса с запрессованной в него гильзой, поворотного золотника, зажатого с одной стороны крышкой с упором и с другой стороны через соединительную возвратную муфту, состоящую из рычага, подпружиненного с двух сторон возвратными пружинами и обеспечивающую возврат поворотного золотника в исходное нулевое положение, выходным валом гибридного шагового двигателя, предназначенного также для вращения поворотного золотника, и электронного устройства, установленного на гибридном шаговом двигателе и управляющего шаговым электродвигателем, состоящего из платы управления и датчика угла поворота золотника, при этом сливной канал пилотного пропорционального распределителя соединен с основным сливным каналом силового распределителя, а его адресные каналы соединены с управляющими каналами силового распределителя.
| CN 110030219 A, 19.07.2019 | |||
| РАСПРЕДЕЛИТЕЛЬНЫЙ БЛОК | 1992 |
|
RU2017018C1 |
| Электрогидравлический распредели-ТЕль для иСпОлНиТЕльНыХ гидРОдВигА-ТЕлЕй дВуСТОРОННЕгО дЕйСТВия | 1979 |
|
SU842234A1 |
| Маршрутно-сигнальный аппарат-централизатор | 1948 |
|
SU83289A1 |
| Расчетный прибор для определения тока возбуждения синхронных машин под нагрузкой | 1936 |
|
SU50614A1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
| CN 107630847 A, 26.01.2018 | |||
| Навесная гидроинерционная вибротрамбовка | 1975 |
|
SU658207A1 |

