Изобретение относится к способу неразрушающего контроля параметров стальных канатов, а также прогнозирования остаточного ресурса каната.
Из уровня техники известен способ неразрушающего контроля поперечного сечения и обнаружения локальных дефектов протяженных ферромагнитных объектов, описанный в патенте RU 2204129 C2. Способ заключается в намагничивании протяженного участка каната и измерении параметров магнитного поля в намагниченном участке. По измеренным параметрам определяют наличие локальных дефектов и площадь поперечного сечения каната. Недостатком приведенного способа является недостаточная точность измерения, а также невозможность прогнозирования остаточного ресурса каната, так как в способе не учитывается растягивающая нагрузка, приложенная к канату, температура окружающей среды, скорость перемещения и прочие параметры физического состояния каната.
Также известен способ контроля технического состояния каната, описанный в патенте RU 2589496 C1, который выбран в качестве прототипа для изобретения. Способ заключается в намагничивании участка каната и снятии параметров каната при помощи двух независимых датчиков, каждый из которых регистрирует обрывы проволоки каната. По измеренным параметрам определяют наличие обрыва проволоки, а также плотность обрывов на данном участке каната. К недостаткам данного способа также относится недостаточная точность измерения и невозможность прогнозирования в автоматическом режиме остаточного ресурса каната.
Задачей, на достижение которой направлено изобретение, является повышение точности измерения параметров каната, а также обеспечение возможности прогнозирования остаточного ресурса каната в автоматическом режиме.
Техническим результатом от использования изобретения является повышение точности прогнозирования остаточного ресурса каната, повышение степени безопасности эксплуатации каната.
Технический результат достигается за счет применения комплекса датчиков, действующих в автоматическом режиме. Комплекс датчиков может включать: датчик температуры, одометр, датчик Холла, индукционный датчик, вихретоковый датчик и датчик натяжения каната. Показания всех датчиков снимаются непрерывно и одновременно и обрабатываются в автоматическом режиме в блоке управления и индикации (далее - БУИ). На основе снятых сигналов в БУИ определяется наработка и коэффициент запаса прочности каната. БУИ сравнивает полученные значения с предельно допустимыми значениями, заложенными в память БУИ для данного типа каната, и формирует решение о техническом состоянии каната, возможности его дальнейшей эксплуатации, а также делает прогноз по остаточному ресурсу каната.
Наработку каната могут определять исходя из показаний одометра и датчика натяжения либо исходя из количества циклов работы каната. Коэффициент запаса прочности определяют на основе математической модели, исходя из данных каналов локальных дефектов, потери сечения, полученных от датчиков Холла и индуктивных катушек, шага свивки и диаметра каната, полученные от вихретокового датчика, а также исходных данных о конструкции каната.
Остаточный ресурс каната могут определять, исходя из полученной зависимости коэффициента запаса прочности от наработки каната путем сравнения текущего значения коэффициента запаса с предельно допустимым для данного каната.
Для исключения аварийных ситуаций при эксплуатации каната БУИ может блокировать использование каната, который не отвечает требованиям прочности, например, путем подачи запрещающего сигнала в блок управления эксплуатирующего канат оборудования.
Расчету коэффициента запаса прочности каната предшествует цикл контроля каната с помощью датчиков магнитной головки дефектоскопа. Расчет наработки производится непрерывно в процессе эксплуатации каната.
Алгоритм расчета наработки каната в тонно-километрах
Для каждого поступающего с одометра импульса производится расчет:
Tkm[n]=Tkm[n-1]+(tkm1*M[n]+tkm2)*C*Ostep
• Tkm[n] - величина наработки на n-ом шаге,
• Tkm[n-1] - величина наработки на (n-1)-ом шаге,
• M[n] - текущее выходное значение датчика натяжения каната,
• tkm1 - мультипликативный коэффициент пересчета показаний датчика натяжения в тонны,
• tkm2 - аддитивный коэффициент пересчета показаний датчика натяжения в тонны,
• C - коэффициент пересчета показаний одометра в километры,
• Ostep - шаг одометра.
Между включениями прибора последнее значение Tkm[n] сохраняется в файл.
Алгоритм расчета коэффициента запаса прочности каната
По завершении каждого цикла контроля производится расчет коэффициента остаточного запаса прочности каната. Для каждого отсчета данных, определяемого шагом одометра, производится расчет значений канала потери сечения (ПС), значений канала локальных дефектов (ЛД), значений индуктивного канала локальных дефектов (ЛДИ). Значения канала ПС формируются в результате суммирования сигналов датчиков Холла для каждого отсчета, скорректированных с учетом показаний датчика температуры. Значения канала ЛД формируются в результате вычитания суммарного сигнала первого кольца датчиков Холла из суммарного сигнала второго кольца датчиков Холла. Значения канала ЛДИ формируются как суммарный сигнал обеих индуктивных катушек.
После записи всей последовательности значений каналов ПС, ЛД и ЛДИ для каждого i-ого отсчета данных производится расчет напряжений в проволоках каната с учетом параметров каната, условий нагружения и результатов контроля каната датчиками МГ:
σ[i, j]=G(X1, X2, X3, X4, S, D1, D2, M, i), где
• j определяет положение проволоки в сечении каната,
• X1 - последовательность (вектор) значений величины ПС,
• X2 - последовательность (вектор) значений величины ЛД,
• X3 - последовательность (вектор) значений величины ЛДИ,
• X4 - последовательность (вектор) значений показаний термодатчика,
• S - номинальная рабочая нагрузка каната,
• D1 - диаметр каната,
• D2 - диаметр пряди каната,
• M - параметры конструкции каната,
• G - функция, которая определяется структурной моделью каната с дефектами. В качестве такой функции допустимо использовать, например, функцию, описанную в Volokhovsky, V. Yu., Vorontsov, A.N., Kagan, A. Ya. and Sukhorukov, V.V. Stochastic assesment of steel rope strength using magnetic NDT results, OIPEEC Technical Meeting, Lenzburg, 2003, 137-144.
Затем рассчитывается коэффициент запаса по напряжениям для наиболее нагруженной проволоки
где σu - маркировочная группа по временному сопротивлению на разрыв материала проволок.
Коэффициент запаса прочности каната на k-ом цикле контроля рассчитывается по формуле:
где n(i, k) - коэффициент запаса прочности в i-ом сечении каната на k-ом цикле контроля.
Решение о техническом состоянии каната принимается на основании сравнения n(k) с величиной n*, равной допустимому остаточному запасу прочности:
если n(k)<n*, то дальнейшая эксплуатация каната недопустима.
Параметры S, D1, D2, M, n* задаются при настройке дефектоскопа на канат.
Алгоритм расчета остаточного ресурса
ΔTkm[k]=F(n(k), n(k-1), n(k-2), Tkm[k], Tkm[k-1], Tkm[k-2], n*)
где F(a1, a2, a3, a4, a5, a6, a7) - функция линейной или полиномиальной аппроксимации для расчета остаточного ресурса в т*км.
Изобретение проиллюстрировано следующими фигурами:
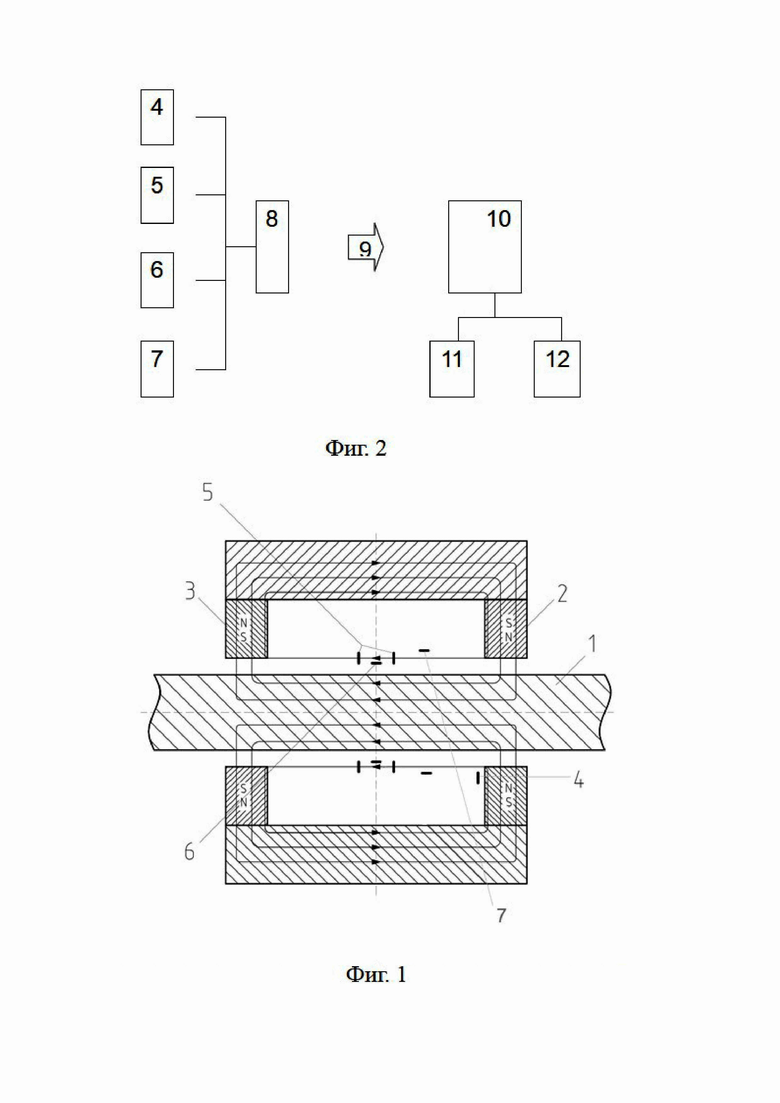
на фиг. 1 изображен схематический разрез блока датчиков магнитной головки, на фиг. 2 изображена блок-схема устройства, работающего по заявленному способу.
Позициями на фиг. 1 обозначены: 1 - участок контролируемого каната, 2, 3 - постоянные магниты, 4 - датчик температуры, 5 - датчики Холла, 6 - индуктивная катушка, 7 - вихретоковый датчик. Позициями на фиг. 2, 4 - датчик температуры, обозначены: 5 - датчики Холла, 6 - индуктивная катушка, 7 - вихретоковый датчик, 8 - магнитная головка (МГ), 9 - кабель соединения МГ и БУИ, 10 - блок управления и индикации (БУИ), 11 - одометр (измеритель пройденной дистанции), 12 - датчик натяжения каната.
Принцип работы устройства, использующего предложенный алгоритм, заключается в следующем. Во время работы эксплуатирующего канат механизма снимаются показания со всех датчиков, обозначенных позициями 4-7, 11, 12. Показания снимают одновременно со всех датчиков, так как в процессе работы устройства важно определить параметры каждого конкретного участка каната. Показания датчиков поступают в блок управления и индикации, в котором по представленному выше алгоритму производится проверка работоспособности каната, рассчитывается коэффициент запаса прочности каната, а затем оценивается его остаточный ресурс, а также принимается решение о продолжении эксплуатации каната, либо о прекращении его эксплуатации.
В памяти БУИ сохраняют значение наименьшего коэффициента запаса, а также положение участка каната, в котором выявлен подобный дефект.
Применение заявленного способа позволяет увеличить точность измерения текущих параметров каната, обеспечивает возможность прогнозирования остаточного ресурса каната в автоматическом режиме, а также приводит к уменьшению простоя оборудования вследствие более точного прогнозирования остаточного ресурса, и, следовательно, более точного назначения планового ремонта для эксплуатируемого оборудования. Автоматизация процесса контроля состояния каната позволяет повысить степень безопасности его эксплуатации и снизить затраты на контроль.
Изобретение относится к способу неразрушающего контроля параметров стальных канатов, а также прогнозирования остаточного ресурса каната. Сущность: осуществляют непрерывное и одновременное снятие показаний датчиков Холла, индуктивных катушек, вихретокового датчика, датчика температуры, датчика натяжения каната и одометра. Полученные данные передают в блок управления и индикации (далее - БУИ) для обработки. На основе снятых данных определяют наработку и коэффициент запаса прочности каната. БУИ сравнивает полученные значения с допустимыми и формирует решение о техническом состоянии каната и прогнозирует его остаточный ресурс. Технический результат: повышение точности прогнозирования остаточного ресурса каната и степени безопасности эксплуатации каната. 1 з.п. ф-лы, 2 ил.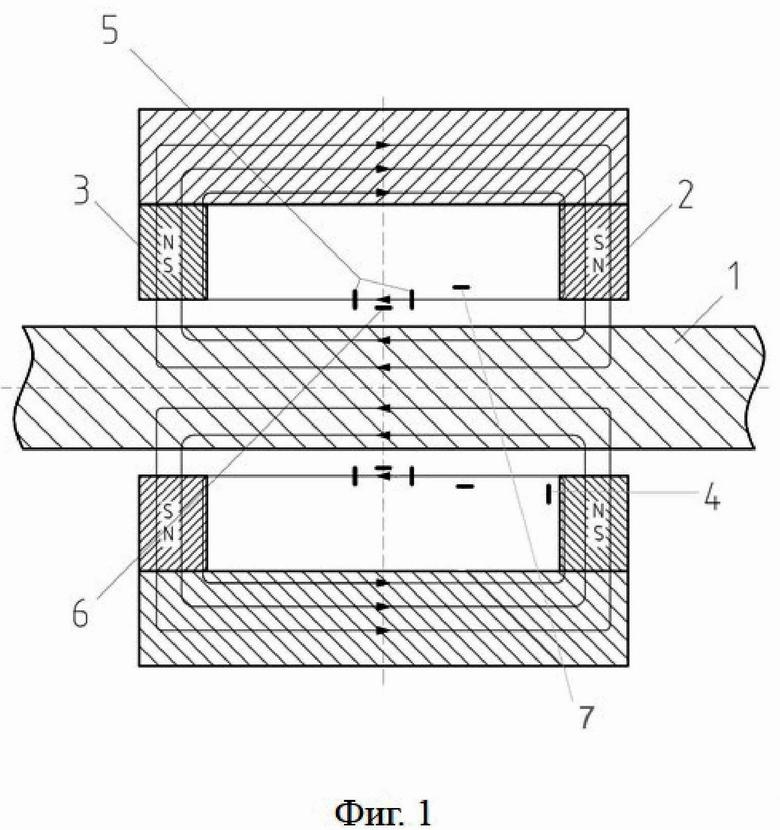
1. Способ прогнозирования остаточного ресурса стального каната, характеризующийся тем, что для непрерывного мониторинга и диагностирования технического состояния каната осуществляют непрерывное и одновременное снятие показаний датчиков Холла, образующих два кольца, индуктивных катушек, вихретокового датчика, датчика температуры, датчика натяжения каната и одометра, полученные данные передают в блок управления и индикации (БУИ) для обработки, на основе снятых данных определяют наработку каната, исходя из данных одометра и датчика натяжения или исходя из числа циклов работы каната, коэффициент запаса прочности каната на основе математической модели прочности контролируемого каната, исходя из данных каналов локальных дефектов и потери сечения, полученных от датчиков Холла и индуктивных катушек, а также данных о диаметре каната и шаге свивки, полученных от вихретокового датчика, БУИ сравнивает полученные значения с допустимыми и формирует решение о техническом состоянии каната и прогнозирует его остаточный ресурс на основе функции линейной или полиномиальной аппроксимации коэффициента запаса прочности каната.
2. Способ по п. 1, характеризующийся тем, что БУИ подает запрещающий эксплуатацию сигнал в блок управления эксплуатирующего канат оборудования.
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ КАНАТА И АВТОМАТИЗИРОВАННЫЙ ДЕФЕКТОСКОП ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2015 |
|
RU2589496C1 |
| Устройство автоматического контроля износа стальных канатов шахтных подъемных машин | 1988 |
|
SU1552086A1 |
| СПОСОБ ИЗМЕРЕНИЯ ИЗНОСА СТАЛЬНЫХ ПРОВОЛОЧНЫХ КАНАТОВ ГРУЗОПОДЪЕМНЫХ МАШИН | 2004 |
|
RU2281489C2 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ПЛОЩАДИ ПОПЕРЕЧНОГО СЕЧЕНИЯ И ОБНАРУЖЕНИЯ ЛОКАЛЬНЫХ ДЕФЕКТОВ ПРОТЯЖЕННЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2204129C2 |
| JP 7181167 А, 21.07.1995 | |||
| KR 1020090076429 A, 13.07.2009. | |||

