Изобретение относится к области навигационного обеспечения необорудованных аэродромов.
Задача измерения наклонной дальности видимости возникает при посадке летательных аппаратов (ЛА) в сложных метеорологических условиях. Современные технические средства дают возможность завести ЛА на глиссаду снижения, пробить облачный слой и вывести ЛА под облака. Наиболее ответственный и трудный этап полета - посадка - осуществляется экипажем визуально на основании использования радиосветотехнических средств и личного опыта экипажа. Посадка на необорудованные радиосветотехническими средствами аэродромы, особенно незнакомые экипажу, даже в относительно приемлемых метеорологических условиях, соответствующих минимуму командира экипажа, с высокой вероятностью чревата авиационными происшествиями [1]. Это обстоятельство связано с отсутствием визуальных и технических средств достаточно точного определения наклонной дальности видимости.
Наклонная дальность посадочной видимости - это расстояние вдоль глиссады (около 3°), на котором пилот на этапе снижения при посадке обнаруживает начало взлетно-посадочной полосы (ВПП) или обозначающие ее реперные объекты, в частности огни. И если пилот имеет информацию о своей высоте полета, обеспечиваемую радиовысотомером с точностью до 5 м, то наклонную дальность видимости он визуально определяет с чрезвычайно большой погрешностью.
Проведенные нами эксперименты по измерению точности визуального определения горизонтальной дальности до различных ориентиров в чистой атмосфере показали, что относительная ошибка определения дальности в среднем составляла 20% при отсутствии априорной информации о местности. Количество испытуемых составляло 30 человек, что обеспечивало статистическую достоверность полученных результатов. Измерения наклонной дальности видимости дают существенно большую погрешность, так как атмосфера в этом случае неоднородна, и наклонная дальность видимости в различных направлениях и на различных участках глиссады является случайной величиной.
На характер наклонной дальности видимости влияет ряд метеорологических факторов, главными из которых являются следующие [1]:
форма облаков и характер их нижней границы;
наличие подоблачной дымки и ее структура;
стратификация температуры в подоблачном слое;
температурный режим земной поверхности и условия ее радиационного выхолаживания;
характер выпадающих осадков.
Таким образом, уже при наличии подоблачной дымки визуальная посадка даже опытного экипажа на незнакомый аэродром чревата авиационными происшествиями.
Известен расчетно-инструментальный способ определения наклонной дальности видимости [1, 2]. Он основан на измерении высоты нижней границы облаков и прозрачности атмосферы в подоблачном слое. По виду вертикального профиля этих элементов, опираясь на статистическую закономерность, рассчитывается дальность обнаружения наземных ориентиров. Недостатки способа: статистический расчет позволяет определить среднюю по аэродрому дальность видимости, но она может не соответствовать реальной, имеющейся на глиссаде снижения; недостаточно высокая оперативность способа, так как требуется значительное время на измерения, расчет и передачу экипажу информации о быстро меняющейся величине видимости на глиссаде посадки, когда для принятия решения у пилота имеется всего лишь несколько секунд.
Известен также способ лазерного зондирования [1, 2], основанный на исследовании параметров рассеянного излучения атмосферой в сторону приемопередатчика, и поиске связи рассеянного излучения с наклонной дальностью видимости. Такой прибор может быть установлен на самолете и лишен недостатков расчетно-инструментального способа. Принципиальным недостатком этого способа является слабая изученность оптических свойств нижнего слоя атмосферы и отсутствие обоснованной теории, связывающей характеристики рассеянного излучения с наклонной дальностью видимости.
Известны оптические дальномеры [3], включающие в себя дальнемерную рейку (реперный объект), зрительную трубу с насадками и зрительный аппарат человека. Они обеспечивают высокую точность измерения как горизонтальной, так и наклонной дальности между неподвижными наблюдателем и реперной горизонтальной линейкой. Тригонометрический способ измерения дальности, лежащий в основе работы оптического дальномера, неприменим для измерения дальности движущимся наблюдателем по следующим причинам:
расстояние от движущегося наблюдателя до реперных линеек на глиссаде посадки изменяется столь быстро, что невозможно оперативно произвести требуемые измерения и вычисления;
при использовании зрительной трубы резко сужается поле зрения, особенно на дальностях, больших 100 м, что делает невозможным управление самолетом;
случайные флуктуации самолета резко снижают точность измерений.
Следовательно, задача обеспечения визуальной посадки на незнакомые, необорудованные радиосветотехническими средствами аэродромы, даже в условиях хорошей видимости, до сих пор не решена с требуемым уровнем безопасности.
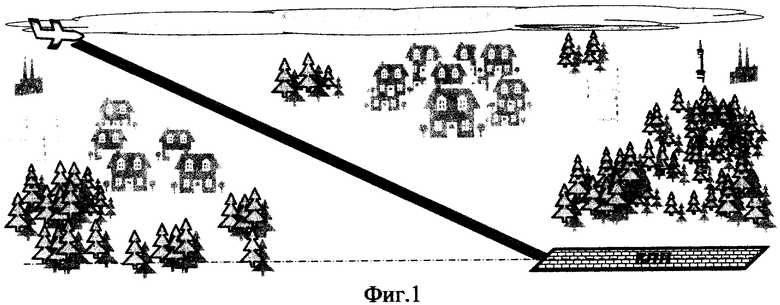
Наиболее близким к предлагаемому способу измерения дальности движущимся наблюдателем является классический способ визуальной посадки, включающий в себя зрительный аппарат человека и набор характерных естественных или искусственных объектов, находящихся вблизи аэродрома (фиг.1 - прототип). Визуальный алгоритм определения дальности человеком точно неизвестен. Предположительно, что это сравнение видимых угловых размеров характерных объектов с обучающей информацией, заложенной в памяти человека. То есть необходимо предварительное обучение пилота визуальной посадке на данный аэродром. С другой стороны, не всегда в районе аэродрома существуют естественные или искусственные характерные объекты, об истинных размерах которых имеется достоверная информация, поэтому так трудно визуально с земли определить высоту летящего самолета.
Следовательно, при визуальной посадке невозможен точный выбор глиссады снижения за счет отсутствия надежной и оперативной информации о наклонной дальности до ВПП, когда на принятие решения и его выполнение остается несколько секунд. Поэтому так трудно обеспечить требуемый уровень безопасности при посадке на необорудованные незнакомые аэродромы, где все зависит только от «человеческого фактора».
С целью повышения точности определения пилотом наклонной дальности до ВПП предлагается синтезировать искусственные реперные объекты, использующие особенности зрительного восприятия человека.
Рассмотрим модель реперного объекта. Известен дифракционный критерий разрешения Релея [5]

где λ - средняя длина волны видимого диапазона, l - расстояние от реперного объекта до глаза наблюдателя, Д - диаметр хрусталика глаза (апертуры), Δхp - разрешаемое расстояние.
С современных позиций разрешающая способность зависит не только от дифракционных ограничений формирующей системы, но и от структуры элементов анализируемой сцены, а также от отношения сигнал/шум, обеспечиваемым приемником сигнала.
В [6] развит общий критерий разрешения, учитывающий свойства сцены, приемной апертуры и самого приемника, где критерий Рэлея является частным случаем. Предложенный подход основан на критерии идеального наблюдателя, когда в качестве решающей функции используется отношение правдоподобия

Здесь W(H1) - условная плотность вероятности, что на фоне белого шума наблюдается один источник - первая гипотеза; W(H2) - альтернативная гипотеза, что наблюдается два источника; P1 и Р2 - априорные вероятности того, что верна первая или вторая гипотезы.
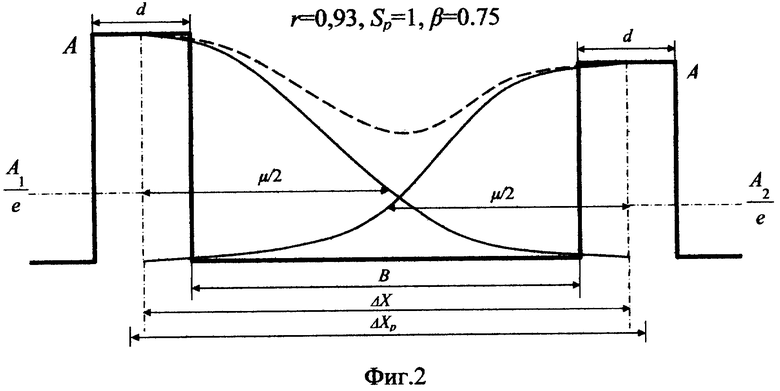
Вычисления, приведенные в [6], позволяют записать вероятность разрешения двух произвольных источников сцены, изображенных на фиг.2, следующим образом

В данном выражении m - энергетическое отношение сигнал/шум. Величина E(Sp) определяет энергетический фактор, характеризующий изменение энергии сигнала при изменении протяженности источников. Данная величина определяется нормированным структурным параметром Рэлея  , где μ - протяженность источника, характеризуемая как его истинным размером, так и дифракционным уширением. Определяется по ослаблению амплитуды сигнала в е раз (фиг.2). Величина Q(r, Sp, β) представляет собой дифракционный фактор. Она характеризует дифракционные свойства формирующей изображение апертуры и зависит от трех нормированных параметров: структурного Sp; коэффициента Рэлея
, где μ - протяженность источника, характеризуемая как его истинным размером, так и дифракционным уширением. Определяется по ослаблению амплитуды сигнала в е раз (фиг.2). Величина Q(r, Sp, β) представляет собой дифракционный фактор. Она характеризует дифракционные свойства формирующей изображение апертуры и зависит от трех нормированных параметров: структурного Sp; коэффициента Рэлея  , который зависит от расстояния между соседними отражающими источниками относительно классического рэлеевского; отражающего
, который зависит от расстояния между соседними отражающими источниками относительно классического рэлеевского; отражающего  , который показывает отношение амплитуд сигнала, отраженного от соседних источников (фиг.2).
, который показывает отношение амплитуд сигнала, отраженного от соседних источников (фиг.2).
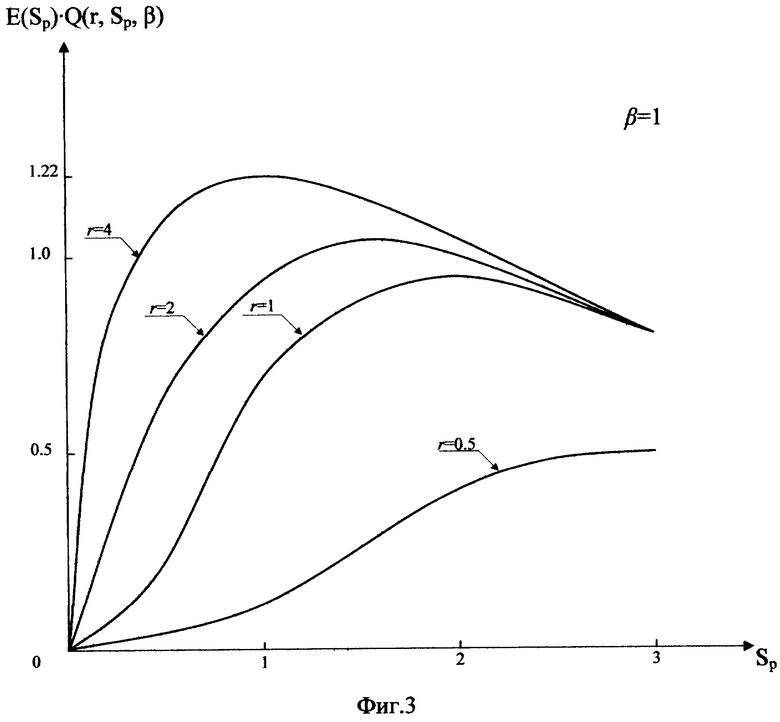
Произведение энергетического и дифракционного факторов, входящее в выражение (3), приведено на фиг.3 для случая β=1, где коэффициент Рэлея входит как параметр. Видно, что оно достигает максимального значения 1,22 при r=4 и 0,8≤Sp≤1,2, когда достигается максимально возможное разрешение элементов сцены. При рэлеевском разрешении r=1 энергетический фактор ухудшает надежность разрешения элементов сцены, и наилучшие условия наблюдения соответствуют случаю Sp=2, когда произведение E·Q=0,95.
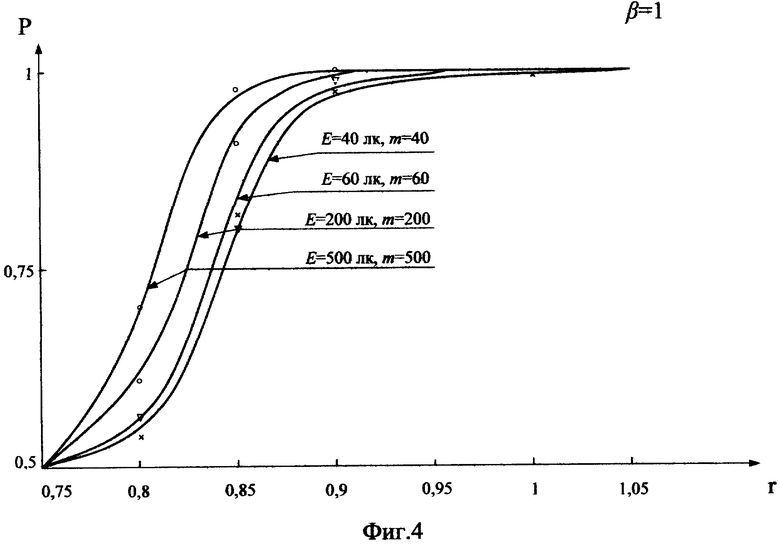
На фиг.4 приведены рассчитанные по соотношению (3) вероятности разрешения мир с различным периодом при различных уровнях освещенности. Минимальная освещенность, когда наблюдатели переставали видеть миру, равнялась 1 Лк. То есть минимально необходимое отношение сигнал/шум в глазах наблюдателя m=40. Экспериментально полученные значения нанесены на рассчитанные кривые кружочками для m=500 и m=200, треугольниками для m=60, крестиками для m=40. Получено хорошее соответствие расчетных и экспериментальных данных, что позволяет использовать разработанный дифракционно-статистический критерий разрешения для адаптивной системы - зрения человека.
При r≥1 наблюдается насыщение кривых, что связано с предельной контрастной чувствительностью глаза ε=0,05 [2,4].
В этом случае мира разрешалась глазом усредненного наблюдателя с вероятностью, близкой к 1 при 40≤m≤500. Такое отношение сигнал/шум соответствует минимальной дальности видимости, равной 50 м, и максимальной - более 10 км, что эквивалентно практически любым метеоусловиям и соответствует требованиям международной гражданской авиации.
На дальности l=50 м разрешение миры составляет хp=2·10-2 м. Поскольку оно линейно зависит от дальности l, то можно ввести удельную разрешающую способность глаза, равную  Эта величина позволяет оценить разрешающую способность глаза при любой дальности до реперного объекта. Так, при наклонной дальности до ВПП l=1 км, даже в плохих метеоусловиях, будет разрешаться мира с периодом d=0,4 м, на расстоянии 500 м - 0,2 м. Необходимо только обеспечить достаточную силу света источников, чтобы реализовать в глазах наблюдателя минимально необходимое отношение сигнал/шум m=40.
Эта величина позволяет оценить разрешающую способность глаза при любой дальности до реперного объекта. Так, при наклонной дальности до ВПП l=1 км, даже в плохих метеоусловиях, будет разрешаться мира с периодом d=0,4 м, на расстоянии 500 м - 0,2 м. Необходимо только обеспечить достаточную силу света источников, чтобы реализовать в глазах наблюдателя минимально необходимое отношение сигнал/шум m=40.
Практическая реализация способа осуществляется следующим образом:
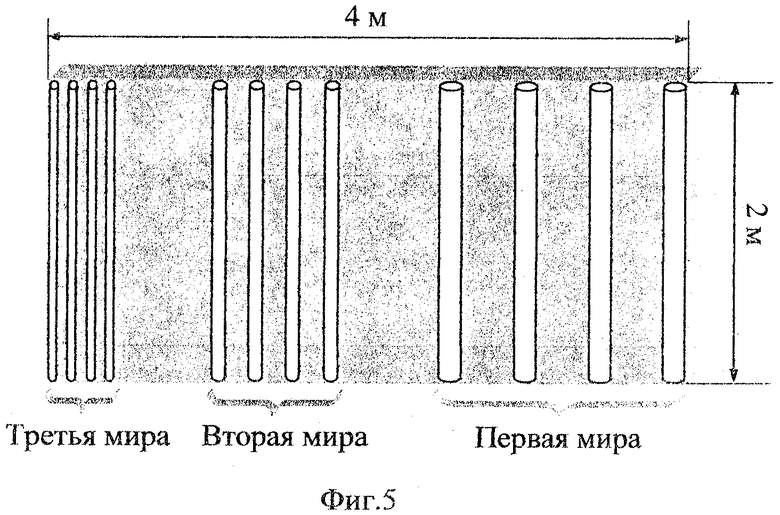
1. Реперными объектами являются два щита, устанавливаемых по краям у торца ВПП. Каждый щит образуют три миры с электрической подсветкой (фиг.5). Первая мира состоит из четырех полос длиной 2,0 м, шириной 8 см и периодом 40 см, разрешаемых при наклонной дальности l1=1 км. Вторая также состоит из четырех полос шириной 4 см и периодом 20 см, разрешаемых при дальности l2=500 м. И, наконец, третья мира имеет период 10 см при ширине полос 4 см, разрешаемый при дальности l3=250 м. Технически каждая полоса миры может представлять собой газосветную лампу с матовым плафоном, обеспечивающим диффузность излучения.
2. Алгоритм действия пилота.
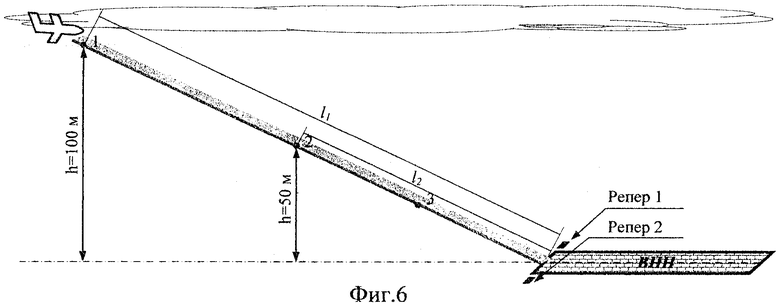
Положим, что высота нижней границы облачности равна 100 м. Пилот либо получает эту информацию от диспетчера (руководителя полетов), либо определяет высоту нижней границы облачности самостоятельно по радиовысотомеру в момент выхода из облаков.
Следующим этапом является обнаружение реперов, которые на дальностях, больших 1 км, представляются в виде размытых светящихся пятен, между которыми находится ВПП (фиг.6). В точке 1 на дальности l1=1 км пилот должен увидеть раздельно полосы первой миры. Яркость ламп должна быть такой, чтобы обеспечить отношение сигнал/шум в глазах пилота не менее 40 для метеоусловий, при которых аэродром обеспечивает посадку самолетов. В точке 2 пилот должен разрешить вторую миру на дальности l2=0,5 км при высоте порядка 50 м, контролируемой по радиовысотомеру. И, наконец, в точке 3 на дальности l3=250 м он должен увидеть раздельно полосы третьей миры на контролируемой высоте порядка 25 м, после чего он в самых худших метеоусловиях должен установить визуальный контакт с ВПП. Если пилот на высоте принятия решения 50 м не разрешает первые две миры, то он уходит на второй круг.
Из фиг.4 следует, что вероятность разрешения мир на линейном участке уменьшается от 0,96 до 0,7 при изменении рэлеевского расстояния r на 5% в широком интервале изменения уровней освещенности от 40 Лк (светлые сумерки) до 500 Лк - дальность видимости более 10 км. То есть предлагаемый способ определения наклонной дальности движущимся наблюдателем до реперных объектов, в которых размещены соответствующие миры, имеет точность порядка 5%, что существенно выше точности известных способов и соответствует точности определения высоты радиовысотомером. Таким образом, отклонение от идеальной глиссады снижения не будет превосходить 7%, а время определения местоположения ЛА экипажем не более секунды, что позволяет оперативно корректировать посадочную глиссаду и принимать обоснованное решение о возможности посадки.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Баранов A.M. Видимость в атмосфере и безопасность полетов. - Л.: Гидрометеоиздат, 1991.
2. Жаренков A.M., Матвеев Л.Т., Ременников Н.В. Воздушная навигация в различных условиях полета. - М.: Воениздат, 1993. - 175 с.
3. Закатов П.С. Инженерная геодезия. - М.: Недра, 1976.
4. Бочарников Н.В. и др. Метеорологическое оборудование аэродромов и его эксплуатация. - С.-П.: Гидрометеоиздат, 2003. - 591 с.
5. Гудмен Д. Введение в Фурье-оптику. - М.: Мир, 1970.
6. Базарский О.В., Коржик Ю.В. Об оптимальной протяженности зашумленных источников, разрешаемых пространственной апертурой. // Радиотехника и электроника. - 1987. - Т.32. - №8. - С.1626-1630.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИЗУАЛЬНОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НЕОБОРУДОВАННЫЕ АЭРОДРОМЫ | 2008 |
|
RU2375263C1 |
| ВИЗУАЛЬНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НЕОБОРУДОВАННЫЕ АЭРОДРОМЫ В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 2021 |
|
RU2781651C1 |
| СПОСОБ ВИЗУАЛЬНОЙ ПОСАДКИ И УСТРОЙСТВО КИРИЛЛОВА ВИЗУАЛЬНОГО ОБЕСПЕЧЕНИЯ ВЗЛЕТА ИЛИ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2475424C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОЙ ПОСАДОЧНОЙ ТРАЕКТОРИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2494932C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| СПОСОБ НАВИГАЦИИ, ПОСАДКИ И ВЗЛЕТА ВЕРТОЛЕТА | 2014 |
|
RU2578202C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| Восьмицветная растровая оптическая система посадки | 2019 |
|
RU2743602C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СИСТЕМА ЕГО ОБЕСПЕЧЕНИЯ | 1999 |
|
RU2156720C1 |
| ЛАЗЕРНАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2007 |
|
RU2369532C2 |
Изобретение относится к области навигационного обеспечения необорудованных аэродромов. Визуальный способ определения наклонной дальности движущимся наблюдателем основан на использовании реперного объекта. Причем устанавливают реперный объект N бинарный мир с периодом 4·10-4 li,  , а li - измеряемая наклонная дальность до реперного объекта, заключение о достижении которой делается движущимся наблюдателем в момент времени, когда полосы i-й миры начинают наблюдаться раздельно. Технический результат направлен на повышение точности определения пилотом наклонной дальности до ВПП, предлагается синтезировать искусственные реперные объекты. 6 ил.
, а li - измеряемая наклонная дальность до реперного объекта, заключение о достижении которой делается движущимся наблюдателем в момент времени, когда полосы i-й миры начинают наблюдаться раздельно. Технический результат направлен на повышение точности определения пилотом наклонной дальности до ВПП, предлагается синтезировать искусственные реперные объекты. 6 ил.
Визуальный способ определения наклонной дальности движущимся наблюдателем, основанный на использовании реперного объекта, отличающийся тем, что устанавливается реперный объект из N бинарных мир с периодом 4·10-4 li, где  , а li - измеряемая наклонная дальность до реперного объекта, заключение о достижении которого делается движущимся наблюдателем в момент времени, когда полоса i-й миры начинает наблюдаться раздельно.
, а li - измеряемая наклонная дальность до реперного объекта, заключение о достижении которого делается движущимся наблюдателем в момент времени, когда полоса i-й миры начинает наблюдаться раздельно.
| RU 2002107135 А, 20.03.2004 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ | 2004 |
|
RU2272254C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ | 2002 |
|
RU2215264C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ РАЗЛИЧНЫХ КЛАССОВ (ВАРИАНТЫ) | 1999 |
|
RU2182313C2 |
| US 5841370 A, 24.11.1998. | |||

