Изобретение относится к области навигационного обеспечения необорудованных аэродромов и может быть использовано при выполнении посадки летательного аппарата (ЛА) на эти аэродромы.
Наиболее ответственный и трудный этап полета ЛА - посадка - осуществляется визуально на основании использования радиосветотехнических средств и личного опыта экипажа. При этом устанавливается визуальный контакт с огнями приближения (наземными ориентирами), а также непрерывно контролируются такие основные параметры полета, как положение ЛА относительно глиссады, курс, высота и удаление до взлетно-посадочной полосы (ВПП), поступательная и вертикальная скорости снижения, боковое отклонение ЛА от осевой линии ВПП [1]. От точности выдерживания параметров глиссады во многом зависят скорость и высота пролета ЛА входной кромки ВПП. Даже при небольших отклонениях величин данных параметров от требований, установленных руководящими документами, посадка запрещается, и осуществляется уход на второй круг [1].
Посадка на необорудованные радиосветотехническими средствами аэродромы, особенно незнакомые экипажу, даже в относительно приемлемых метеорологических условиях, соответствующих минимуму командира экипажа, с высокой вероятностью чревата авиационными происшествиями [2]. Это обстоятельство, в частности, связано с отсутствием визуальных и технических средств достаточно точного определения наклонной дальности до начала ВПП и, как следствие, невыдерживанием параметров глиссады посадки.
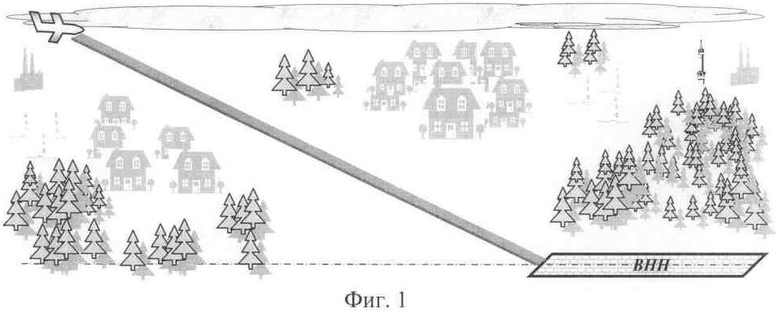
Наиболее близким к предлагаемому способу является способ визуальной посадки на необорудованный аэродром, включающий в себя зрительный аппарат человека и набор характерных наземных естественных или искусственных объектов [3], находящихся вблизи аэродрома (фиг.1 - прототип). При этом выдерживание параметров глиссады посадки летчиком осуществляется с помощью использования бортового радиовысотомера и информации об удалении до ВПП на основе использования наземных объектов, находящихся вблизи аэродрома [2, 3]. Визуальный алгоритм определения дальности человеком точно не известен. Предположительно, что это сравнение видимых угловых размеров характерных объектов с обучающей информацией, заложенной в памяти человека. То есть необходимо предварительное обучение пилота визуальной посадке на данный аэродром. С другой стороны не всегда в районе аэродрома существуют естественные или искусственные характерные объекты, об истинных размерах которых имеется достоверная информация.
Следовательно, при визуальной посадке на незнакомый необорудованный аэродром невозможен точный выбор глиссады снижения за счет отсутствия надежной и оперативной информации о наклонной дальности до начала ВПП, когда летчику на принятие решения и его выполнение остается несколько секунд. Поэтому задача обеспечения посадки ЛА на незнакомые необорудованные радиосветотехническими средствами аэродромы, даже в условиях хорошей метеорологической видимости, до сих пор не решена с требуемым уровнем безопасности.
Техническим результатом изобретения является повышение точности выдерживания летчиком параметров глиссады снижения при выполнении посадки ЛА на необорудованные аэродромы.
Указанный технический результат достигается тем, что в известном способе визуальной посадки ЛА на необорудованные аэродромы, основанном на определении высоты ЛА по бортовому радиовысотомеру и на использовании зрительного аппарата человека, в выбранных точках глиссады определяют наклонную дальность до начала ВПП с использованием искусственных реперных объектов, установленных в торце ВПП по обе стороны, состоящих из N бинарных мир с периодом 4·10-4·li, где  a li - измеряемая наклонная дальность до реперного объекта, заключение о достижении которой делается летчиком в момент времени, когда полосы i-й миры начинают наблюдаться раздельно.
a li - измеряемая наклонная дальность до реперного объекта, заключение о достижении которой делается летчиком в момент времени, когда полосы i-й миры начинают наблюдаться раздельно.
Сущность изобретения поясняется фиг.1-3.
На фиг.1 представлен существующий способ визуальной посадки на необорудованный аэродром, являющийся прототипом предлагаемого способа. Он включает в себя зрительный аппарат человека и набор характерных наземных естественных или искусственных объектов, находящихся вблизи аэродрома. При этом выдерживание параметров глиссады посадки летчиком осуществляется с помощью бортового радиовысотомера и информации об удалении до ВПП на основе использования наземных объектов, находящихся вблизи аэродрома.
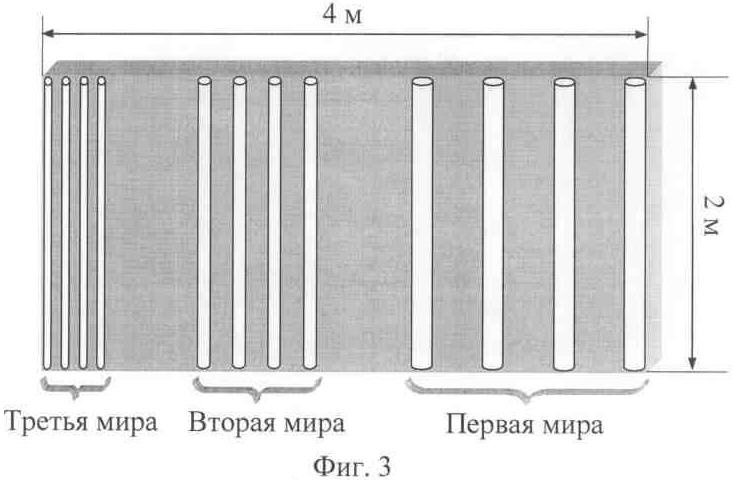
На фиг.2 представлен предлагаемый способ визуальной посадки на незнакомый необорудованный аэродром при отсутствии характерных наземных объектов (например, пустынная местность), где 1 - первый реперный объект, а 2 - второй реперный объект. Данные объекты установлены в торце ВПП по обе стороны.
На фиг.3 наглядно представлен реперный объект, состоящий из трех бинарных мир.
Положим, что высота нижней границы облаков равна 100 м (фиг.2). Летчик либо получает эту информацию от диспетчера (руководителя полетов), либо определяет высоту нижней границы облачности самостоятельно по бортовому радиовысотомеру в момент выхода из облаков. Следующим этапом является обнаружение реперных объектов, которые на дальностях больших 1 км представляются в виде размытых светящихся пятен, между которыми находится ВПП (фиг.2). В точке 1 на дальности l1=1 км летчик начинает видеть раздельно полосы первой миры. Яркость светлых полос мир должна быть такой, чтобы обеспечить отношение сигнал/шум в глазах летчика не менее 40 для метеоусловий, при которых аэродром обеспечивает посадку самолетов [4]. В точке 2 летчик разрешает вторую миру на дальности l2=0,5 км при высоте порядка 50 м, контролируемой по радиовысотомеру. И, наконец, в точке 3 на дальности l3=250 м он начинает видеть раздельно полосы третьей миры на контролируемой высоте порядка 25 м, после чего он в самых худших метеоусловиях должен установить визуальный контакт с ВПП. Если летчик на высоте принятия решения 60-50 м не разрешает первые две миры, то он уходит на второй круг. Предложенные реперные объекты способны обеспечить летчика информацией о наклонной дальности до ВПП с точностью до 5%, что существенно выше точности известных способов. При этом отклонение параметров глиссады снижения от идеальных не будет превосходить 7%, а время определения местоположения ЛА экипажем не более секунды.
Таким образом, предложенный способ позволяет летчику оперативно корректировать параметры глиссады снижения, что будет способствовать существенному повышению безопасности при выполнении посадки ЛА на незнакомый необорудованный аэродром.
Практическая реализация предлагаемого способа осуществляется следующим образом.
Наземные искусственные реперные объекты могут быть выполнены, например, в виде двух одинаковых щитов, установленных в торце ВПП по обе стороны. Каждый щит образуют три миры с электрической подсветкой (фиг.3). Источником питания могут являться аккумуляторные батареи. Первая мира состоит из четырех полос длиной 2,0 м, шириной 8 см и периодом 40 см, разрешаемых при наклонной дальности до начала ВПП l1=1 км. Вторая также состоит из четырех полос шириной 4 см и периодом 20 см, разрешаемых при наклонной дальности l2=500 м. И, наконец, третья мира имеет период 10 см при ширине полос 4 см, разрешаемый при наклонной дальности l3=250 м (фиг.3). Технически каждая полоса миры может представлять собой газосветную лампу с матовым плафоном, обеспечивающим диффузность излучения.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Инструкция по взаимодействию и технология работы членов экипажа самолета ИЛ-76 (ИЛ-76Т). - М.: Воздушный транспорт, 1984. - 88 с.
2. Жаренков A.M., Матвеев Л.Т., Ременников Н.В. Воздушная навигация в различных условиях полета. - М.: Воениздат, 1993. - 175 с.
3. Закатов П.С.Инженерная геодезия. - М.: Недра, 1976.
4. Бочарников Н.В. и др. Метеорологическое оборудование аэродромов и его эксплуатация. - СПб.: Гидрометеоиздат, 2003. - 591 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИЗУАЛЬНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДВИЖУЩИМСЯ НАБЛЮДАТЕЛЕМ | 2006 |
|
RU2326348C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СИСТЕМА ЕГО ОБЕСПЕЧЕНИЯ | 1999 |
|
RU2156720C1 |
| СПОСОБ ВИЗУАЛЬНОЙ ПОСАДКИ И УСТРОЙСТВО КИРИЛЛОВА ВИЗУАЛЬНОГО ОБЕСПЕЧЕНИЯ ВЗЛЕТА ИЛИ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2475424C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2214943C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| ВИЗУАЛЬНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НЕОБОРУДОВАННЫЕ АЭРОДРОМЫ В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 2021 |
|
RU2781651C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА НЕЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2546550C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОЙ ПОСАДОЧНОЙ ТРАЕКТОРИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2494932C1 |
Изобретение относится к области навигационного обеспечения необорудованных аэродромов. При визуальной посадке летательных аппаратов на незнакомые необорудованные аэродромы определяют высоту летательного аппарата по бортовому радиовысотомеру и используют зрительный аппарат человека. Летчик определяет в выбранных точках глиссады наклонной дальности до начала взлетно-посадочной полосы с использованием искусственных реперных объектов, установленных в торце взлетно-посадочной полосы по обе стороны. Объекты состоят из N бинарных мир с периодом 4·10-4·li, где li - измеряемая наклонная дальность до реперного объекта. При достижении наклонной дальности летчик делает заключение в момент времени, когда полосы i-й миры начинают наблюдаться раздельно. Достигается повышение точности выдерживания летчиком параметров глиссады снижения при выполнении посадки летательных аппаратов на необорудованные аэродромы. 3 ил.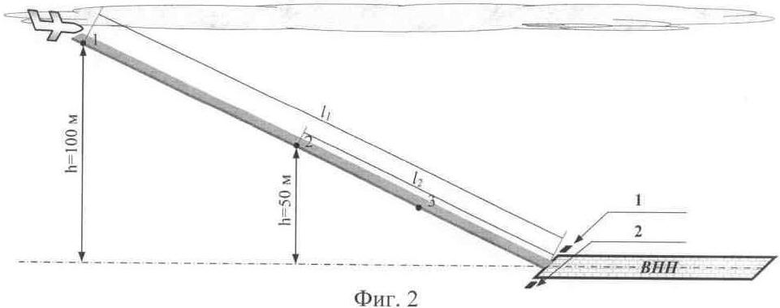
Способ визуальной посадки летательных аппаратов на необорудованные аэродромы, основанный на определении высоты летательного аппарата по бортовому радиовысотомеру и на использовании зрительного аппарата человека, отличающийся тем, что в выбранных точках глиссады определяют наклонную дальность до начала взлетно-посадочной полосы с использованием искусственных реперных объектов, установленных в торце взлетно-посадочной полосы по обе стороны, состоящих из N бинарных мир с периодом 4·10-4·li, где i=1, N, а li - измеряемая наклонная дальность до реперного объекта, заключение о достижении которой делается летчиком в момент времени, когда полосы i-й миры начинают наблюдаться раздельно.
| ВИЗУАЛЬНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДВИЖУЩИМСЯ НАБЛЮДАТЕЛЕМ | 2006 |
|
RU2326348C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ | 2004 |
|
RU2272254C1 |
| ВСЕСОЮЗНАЯ IflATEJiTHO-lTSi'r:!' ЩБИБЛИОТ!^:КА I | 0 |
|
SU352132A1 |
| US 5841370 A, 24.11.1998. | |||

