Изобретение относится к способам контроля и диагностирования состояния пневмогидравлических объектов, работающих в экстремальных условиях, например жидкостных ракетных двигателей (ЖРД).
Известен способ контроля состояния пневмогидравлического объекта, а именно - жидкостного ракетного двигателя при стендовых испытаниях, заключающийся в измерении контрольных параметров и сравнении их с допустимыми (пороговыми) значениями, который реализуется с помощью стендовой информационно-измерительной системы (См. например, "Испытания ЖРД" под ред. Левина В. Я., Москва, "Машиностр.", 1981 г., с. 199).
Данный способ осуществляет контроль состояния объекта и не позволяет диагностировать неисправность, т.е. определить место, степень и наименование неисправности или, другими словами, провести распознавание, локализовать неисправность.
Наиболее близким к предлагаемому является способ контроля и диагностирования состояния пневмогидравлического объекта, заключающийся в том, что измеряют параметры в контрольных точках объекта, сравнивают их с пороговыми значениями (уровнями) и диагностируют (локализуют) неисправность в случае выхода текущего значения параметра за его пороговый уровень (патент РФ N 2018900, 1990 г., кл. G 05 B 23/00, F 15 C 5/00). В известном способе диагностируют неисправность путем вычисления по измеренным значениям параметров характеристик комплектующих узлов пневмогидравлического объекта и последовательного сравнения вычисленных характеристик со своими пороговыми значениями.
Известный способ не обеспечивает требуемых достоверности глубины и времени диагностирования для пневмогидравлических объектов, характеризующихся нестационарным режимом работы в экстремальных условиях. Вычисление статических характеристик комплектующих узлов по значениям параметров на нестационарном режиме работы приводит к высокой погрешности, которая определяется динамическими характеристиками объекта и видом неисправности, не известным в момент вычисления. Указанная погрешность увеличивается по мере развития неисправности и отклонения измеренных значений параметров от их исходных значений при нормальной работе объекта, что приводит к полной недостоверности вычислений при некоторой степени развития неисправности. Кроме того, напряженные условия работы (высокие температуры, виброперегрузки) приводят к тому, что ряд датчиков выходит из строя в процессе работы объекта. Однако совокупность операций известного способа на позволяет в процессе диагностирования осуществлять контроль состояния используемых датчиков. Высокая погрешность вычисления характеристик комплектующих узлов и возможные неконтролируемые отказы датчиков могут привести к неправильному диагностированию состояния объекта, т.е. снижают достоверность диагностирования.
Глубина диагностирования неисправности, т.е. степень детализации диагностического заключения до конкретного конструктивного элемента объекта, является важным показателем качества диагностирования высоконапряженных объектов. Существуют неисправности, в том числе - неисправности отдельных узлов одного агрегата диагностируемого объекта, близкие по влиянию на изменение характеристики данного агрегата в целом, но различие которых имеет принципиальное значение, а именно: одни требуют немедленного прекращения работы объекта, другие допускают возможность работы в течение некоторого времени без катастрофических последствий (например - для ЖРД: выкрашивание лопаток или разгар соплового аппарата основной турбины). Глубина диагностирования по известному способу определяется наличием параметров, по которым вычисляются характеристики неисправного узла. При вычислении каждой характеристики используются, как правило, значения нескольких параметров. Это определяет высокую чувствительность известного способа к составу параметров, а именно - при отсутствии одного из измерений, необходимых для вычисления характеристики конкретного узла, его неисправность будет распознаваться только как неисправность более крупного элемента объекта, в состав которого входит неисправный узел и для вычисления характеристики которого достаточно существующих измерений. Количество устанавливаемых на пневмогидравлическом объекте датчиков ограничивается по различным соображениям (для обеспечения надежности, требуемых габаритов, массы и т.д.). Поэтому система измерений позволяет получить характеристики довольно крупных элементов и составных частей объектов, не обеспечивая поиска отказавшего узла и, таким образом, не обеспечивая требуемой глубины диагностирования. Возможные отказы датчиков также существенно снижают глубину распознавания неисправности известным способом.
Направление поиска отказавшего узла в известном способе не оговорено. Поэтому время диагностирования в общем случае определяется количеством контролируемых узлов пневмогидравлического объекта, который содержит, как правило, большое количество комплектующих узлов (от десятков до сотен), описываемых, в свою очередь, сложным комплексом характеристик. Вычисление характеристик всех узлов объекта, а следовательно, и весь процесс диагностирования, требует большого количества времени. Поэтому известный способ не применим для диагностирования экстремальных ситуаций, требующих немедленного прекращения работы объекта. Таким образом, известный способ не обеспечивает требуемой глубины диагностирования (тем более - в случае отказа датчиков) и необходимого времени диагностирования неисправностей для принятия своевременного и достоверного решения о дальнейшем управлении работой объекта.
Задачей, решаемой изобретением, является повышение достоверности и глубины, а также сокращение времени диагностирования для своевременного принятия решения о дальнейшем управлении работой пневмогидравлического объекта.
Это достигается тем, что в предлагаемом способе измеряют текущие значения параметров в контрольных точках объекта, сравнивают их со значениями пороговых уровней и диагностируют неисправность в случае выхода параметра за его пороговый уровень. Диагностирование неисправности проводят поэтапно и на каждом этапе фиксируют очередность и направление выхода параметров за их пороговые уровни, в соответствии с которыми диагностируют неисправность, при этом в момент выхода первого из параметров за его пороговый уровень начинают отсчет контрольного интервала времени, в течение которого фиксируют количество параметров, вышедших за свои пороговые уровни. В случае выхода за пороговые уровни более одного параметра устанавливают факт неисправности и определяют дополнительные пороговые уровни измеряемых параметров, которые используют на следующем этапе диагностирования до полной локализации неисправности, а величины дополнительных пороговых уровней выбирают на основе измерений текущих значений параметров на момент распознавания неисправности на предыдущем уровне. В случае выхода за пороговые уровни и последующего возврата в пределы исходных пороговых уровней в течение контрольного интервала времени только одного из параметров принимают решение о его случайном выбросе, а в случае отсутствия возврата - решение об отказе датчика этого параметра.
Новым в предлагаемом способе, обеспечивающим решение поставленной задачи, является то, что диагностирование неисправности проводят поэтапно и на каждом этапе фиксируют очередность и направление выхода параметров за их пороговые уровни, в соответствии с которыми диагностируют неисправность, при этом в момент выхода первого из параметров за его пороговый уровень начинают отсчет контрольного интервала времени, в течение которого фиксируют количество параметров, вышедших за свои пороговые уровни, в случае выхода за пороговые уровни более одного параметра устанавливают факт неисправности и определяют дополнительные пороговые уровни измеряемых параметров, которые используют на следующем этапе диагностирования до полной локализации неисправности, а величины дополнительных пороговых уровней выбирают на основе измерений текущих значений параметров на момент распознавания неисправности на предыдущем уровне, причем в случае выхода за пороговые уровни и последующего возврата в пределы исходных пороговых уровней в течение контрольного интервала времени только одного из параметров принимают решение о его случайном выбросе, а в случае отсутствия возврата - решение об отказе датчика этого параметра.
В предлагаемом способе для диагностирования состояния пневмогидравлического объекта используются наиболее общие закономерности поведения всей совокупности его параметров, индивидуальные для каждой неисправности, а именно - очередность и направление выхода параметров при неисправности за их пороговые уровни. Отсутствие в предлагаемом способе расчетов характеристик комплектующих узлов исключает влияние на достоверность диагностического заключения погрешности вычислений, которая зависит от нестационарности режима работы, виде неисправности, степени развития неисправности и не известна в момент вычисления, т.е. повышает достоверность диагностирования. Кроме того, высокая достоверность диагностирования на различных стадиях развития неисправности позволяет ее поэтапное диагностирование, которое заключается в последовательном подключении дополнительных пороговых уровней для измеряемых параметров по результатам предыдущего этапа до полной локализации неисправности. Это обеспечивает требуемую глубину диагностирования предлагаемым способом.
С другой стороны, исключение промежуточных вычислений позволяет вести диагностирование по мере поступления текущей информации от очередного параметра, т.е. совместить процессы сбора информации и диагностирования. При этом исключение погрешности промежуточных вычислений позволяет уменьшить диапазон между верхним и нижним пороговыми уровнями ("сузить" допуски), приблизив уровни к номинальному значению параметров при нормальной работе объекта. Указанные обстоятельства существенно снижают время диагностирования неисправности и позволяют в экстремальных условиях управлять работой объекта для парирования катастрофических последствий неисправности.
Поведение всей совокупности параметров информативнее конкретного значения одной характеристики узла, вычисленной по измеренным значениям нескольких параметров, т. к. причина изменения значения характеристики может быть не связана с неисправностью данного узла. Поэтому предлагаемый способ, по сравнению с известным, менее чувствителен к составу измеряемых параметров, что проявляется в следующем: для диагностирования одинакового перечня неисправностей предлагаемому способу требуется меньшее количество измеряемых параметров (в частности, не требуются все параметры, необходимые для вычисления характеристик диагностируемых узлов объекта), либо - при использовании одинакового перечня измеряемых параметров - предлагаемый способ обеспечит диагностирования большего числа неисправностей именно в части повышения глубины диагностирования. Поэтому при использовании предлагаемого способа факт отказа датчиков не обязательно приводит к вынужденному "укрупнению" диагностируемого элемента объекта. Однако контроль появления отказа датчиков оказывает принципиальное влияние на достоверность диагностирования.
Операции предлагаемого способа позволяют естественным образом одновременно с контролем состояния объекта проводить контроль состояния датчиков параметров без существенного увеличения времени диагностирования: опыт эксплуатации высоконапряженных объектов показывает, что выход за пороговые уровни значения единственного из всей совокупности параметров свидетельствует либо о случайном выбросе измеряемого значения - при своевременном возврате параметра в пределы пороговых уровней, либо об отказе датчика параметра - при отсутствии возврата значения параметра в пределы пороговых уровней. Исключение из анализа параметров по отказавшим датчикам значительно повышает достоверность диагностирования предлагаемым способом без существенного сокращения (с учетом информативности используемых закономерностей) глубины диагностирования. При этом требуемая глубина диагностирования может быть обеспечена до начала работы объекта незначительным увеличением (избыточностью) исходного перечня параметров без обязательного дублирования высоконапряженных датчиков, наиболее подверженных отказам при работе объекта.
Таким образом в предлагаемом способе обеспечивается повышение достоверности и глубины, а также сокращение времени диагностирования для своевременного принятия решения о дальнейшем управлении работой пневмогидравлического объекта.
В общем виде предлагаемый способ реализуется следующим образом.
Исходными данными являются результаты измерений параметров в контрольных точках объекта и эталонные описания полного перечня классов неисправностей в выбранных признаках. Описание неисправного состояния в общем случае представляет собой вектор-строку
Zv= {n
где nj (k) - порядковый номер выхода j-го параметра за свой k-ый пороговый уровень в общей очередности выходов параметров при развитии v-ой неисправности;
j = 1,..., J - номер параметра в общем списке контролируемых параметров, определяющий соответствующую параметру позицию элемента nj (k) в векторе Zv;
J - количество измеряемых параметров;
K - номер достигаемых уровней параметров;
v = 1,..., V - наименование (номер) неисправности в общем перечне диагностируемых неисправностей.
Позиция каждого элемента вектора Zv соответствует конкретному параметру, а значение элемента - порядковому номеру выхода данного параметра за свой пороговый уровень в общей очередности выходов параметров.
Эталонные описания выбранного перечня неисправностей формируются до начала работы с помощью математической модели объекта, либо в результате обработки данных предыдущих испытаний и эксплуатации объекта. При формировании эталонных описаний выбирают необходимое количество и величину пороговых уровней для каждого параметра, обеспечивающих требуемую глубину диагностирования неисправностей в случае отказа любого из датчиков исходного состава контролируемых параметров и при наиболее вероятных сочетаниях отказов нескольких датчиков. Полученную совокупность уровней разделяют на группы. В каждую группу для каждого контролируемого параметра входят по два уровня (верхний и нижний), симметрично расположенные относительно значения параметра при нормальной работе объекта и отстоящие на все большую величину от нормальных значений параметров по мере увеличения номера группы. Первую группу образуют уровни, ближайшие к значениям параметров при нормальной работе объекта. Уровни первой группы являются исходным и используются на этапе контроля и начальном этапе диагностирования. Уровни последующих групп являются дополнительными и используются на последующих этапах диагностирования для получения требуемой глубины диагностирования неисправности.
Для контроля состояния датчиков параметров, а также для ограничения времени формирования описания неисправности с использованием каждой группы уровней, до начала работы задают значение контрольного интервала времени. Величина контрольного интервала определяется на основании анализа описаний состояния конкретного объекта как наибольшее из возможных времен выхода параметра за своей пороговый уровень и составляет 0,3 ... 1,0 с.
По предлагаемому способу в процессе работы пневмогидравлического объекта выполняют следующие операции контроля и диагностирования.
1. Измеряют текущие значения параметров в контрольных точках объекта.
2. Сравнивают измеренные значения каждого параметра со значениями его исходных пороговых уровней.
При нахождении всех параметров в диапазоне между пороговыми уровнями считают состояние объекта нормальным.
При выходе любого первого из параметров за его пороговый уровень устанавливают факт появления неисправности (пневмогидравлического объекта или датчика параметра) и переходят к ее диагностированию.
3. В момент выхода первого из параметра за пороговый уровень начинают отсчет контрольного интервала времени.
4. Фиксируют количество параметров, вышедших за свои пороговые уровни в течение контрольного интервала времени.
5. а. В случае выхода в течение контрольного интервала времени более одного параметра за свои пороговые уровни устанавливают факт неисправности пневмогидравлического объекта и проводят ее поэтапное диагностирование. На первом этапе используют исходные пороговые уровни параметров этапа контроля. В процессе выхода параметров за используемые на текущем этапе диагностирования пороговые уровни определяют группу дополнительных уровней, которая (в случае необходимости) будет использоваться на следующем этапе диагностирования. Для этого в момент выхода последнего из контролируемых параметров, а при наличии невышедших параметров - в момент окончания контрольного интервала времени, из всех групп пороговых уровней выбирают такую, уровни которой являются ближайшим к текущим значениям параметров, но не достигнуты еще ни одним из параметров. Одновременно (по мере поступления информации) производят диагностирование неисправности с помощью используемых на текущем этапе пороговых уровней следующим образом (операции 6 ...8).
6. Фиксируют временную очередность и направление выхода параметров за их пороговые уровни, в соответствии с которыми формируют описание неисправности объекта. Для этого каждому параметру присваивают порядковый номер во временной очередности выходов параметров. В зависимости от направления выхода порядковому номеру параметра присваивают соответствующий знак (выход вверх - знак "+", выход вниз - знак "-"). В случае отсутствия выхода параметра за свой пороговый уровень в течение контрольного интервала времени, данному параметру присваивают ноль. В результате получают описание - вектор состояния объекта в виде (1).
7. Сопоставляют описание диагностируемого состояния с эталонными описаниями, для чего производят поэлементное сравнение диагностируемой и эталонных очередностей.
Операции 6 и 7 осуществляют одновременно, сразу после установления факта неисправности объекта в операции 5.а. и по мере поступления информации о выходе параметров за свои пороговые уровни.
8. Принимают решение о состоянии объекта.
В случае совпадения всех элементов диагностируемой очередности с одной из эталонных по знаку и порядковому номеру диагностирование считают завершенным. Диагностируемому состоянию присваивают наименование эталонного описания неисправности.
В случае совпадения диагностируемой очередности с несколькими эталонными описаниями, соответствующими различным неисправностям, продолжают диагностирование, для чего повторяют операции 5 ... 8. При этом в качестве пороговых используют дополнительные уровни, определенные в п. 5.а., а из эталонных описаний выбирают соответствующие номеру группы подключаемых уровней.
5. б. При нахождении значений всех остальных (кроме первого вышедшего) параметров в течение контрольного интервала времени в диапазоне между пороговыми уровнями устанавливают факт неисправности датчика, который классифицируют следующим образом. В случае возврата значения первого вышедшего параметра в течение контрольного интервала времени в пределы исходных пороговых уровней фиксируют случайный выброс параметра и после завершения операции 5. б. продолжают выполнение операций контроль 2 ... 4. В случае отсутствия возврата первого вышедшего параметра фиксируют отказ датчика этого параметра. При этом данный параметр исключают из состава контролируемых параметров, а информацию по данному параметру исключают (для данного испытания) из эталонных описаний. После завершения операции 5.б. продолжают выполнение операций контроля 2 ... 4 по отношению к оставшимся контролируемым параметрам.
При диагностировании неисправности операции 5 ... 8 повторяют для каждого этапа диагностирования до полной локализации неисправности. После завершения диагностирования результаты передают в систему управления объекта для принятия решения о порядке дальнейшего управления объектом.
Операции 3 ... 8 являются новыми и позволяют обеспечить достоверный контроль состояния пневмогидравлического объекта в целом и, в том числе, текущий контроль состояния датчиков параметров в процессе испытания, а в случае возникновения неисправности провести ее полную локализацию, т.е. надежно установить наименование, место и степень неисправности.
При диагностировании неисправности предлагаемым способом вместо вычисления характеристик узлов объекта используются общие закономерности поведения совокупности параметров объекта, индивидуальные для каждой конкретной неисправности. Это обеспечивает независимость достоверности диагностирования от характера режима работы объекта и возможность достижения большей глубины распознавания меньшим составом контрольных параметров. Вместе с этим, предлагаемый способ формирования описания неисправности включает текущий контроль состояния датчиков и учитывает результаты указанного контроля на каждом этапе диагностирования. Это также способствует повышению достоверности и достижению требуемой глубины диагностирования, в том числе при наличии отказов датчиков.
Последовательность операций контроля и диагностирования, позволяющая их совмещение и практически одновременное выполнение по мере поступления информации, обеспечивает высокое быстродействие предлагаемого способа и позволяет его использование в темпе работы объекта. Следует отметить, что эффективность и необходимость использования при формировании описания неисправности конкретных пороговых уровней определяется текущим состоянием системы измерения и индивидуальным для каждой неисправности поведением контролируемых параметров и не могут быть обеспечены предварительными операциями до начала работы пневмогидравлического объекта.
Предлагаемый способ был реализован при стендовых технологических испытаниях ЖРД. В процессе испытания были осуществлены операции контроля и диагностирования предлагаемого способа, позволившие своевременно установить появление неисправности "Разрушение лопаток основной турбины", последовательность и описание которых приведены ниже.
Сущность способа поясняется в таблицах и на чертежах, где
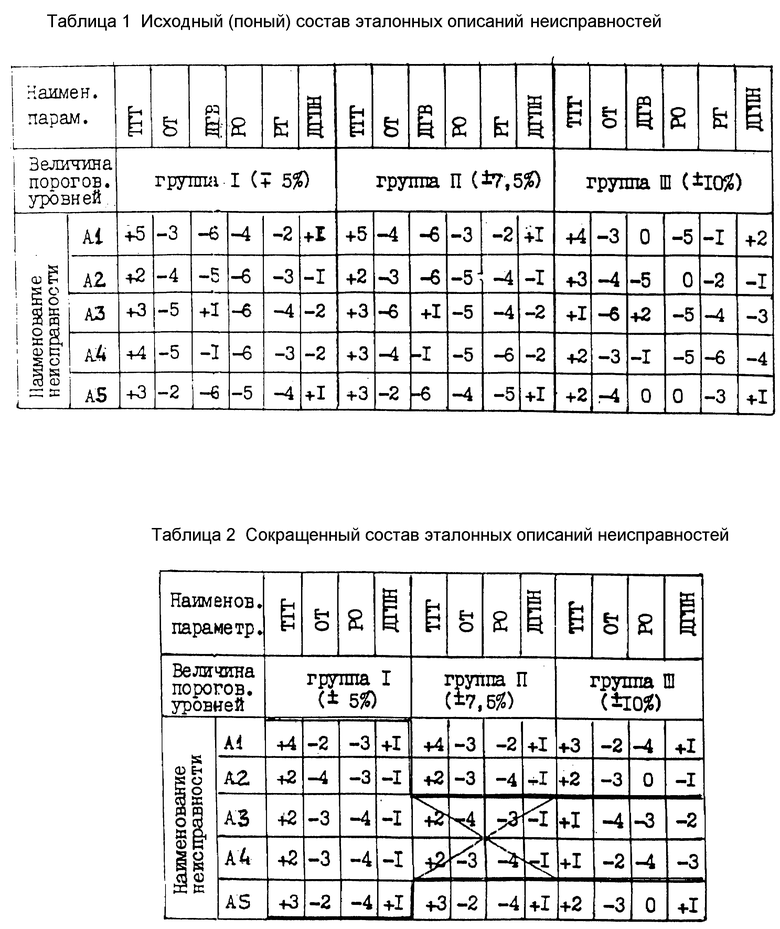
Табл. 1 - Исходный (полный) состав эталонных описаний неисправностей.
Табл. 1 - Сокращенный состав эталонных описаний неисправностей (по результатам анализа исключены параметры ДГВ и РГ).
Фиг. 1 - Графики поведения параметров при анализируемой неисправности и расположение исходных и дополнительных пороговых уровней.
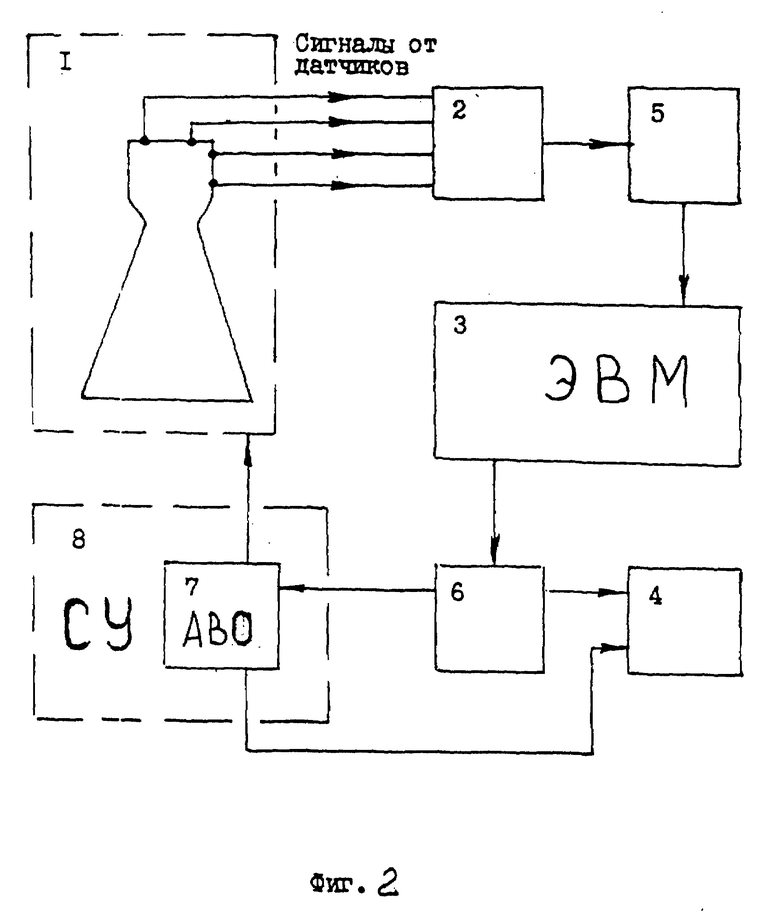
Фиг. 2 - Структурная схема информаицонно-измерительной системы (ИИС) для контроля и диагностирования объектов.
Исходный состав контролируемых параметров включал в себя следующие замеры: ТГГ - температура в газогенераторе; ОТ - обороты основной турбины; ДГВ - давление в газоводе (после турбины); РО, РГ - расходы окислителя и горючего; ДГПН - давление после насоса горючего. Указанный порядок параметров был использован при формировании эталонных и анализируемого описаний состояния объекта. В табл. 1 приведены эталонные описания следующих неисправностей: A1 - засорение магистрали горючего; A2 - разрушение крыльчатки насоса горючего; A3 - разрушение лопаток основной турбины; A4 - разгар форсуночной головки камеры сгорания; A5 - снижение механического КПД турбонасосного агрегата. Эталонные описания был сформированы с помощью математической модели объекта для трех групп пороговых уровней: ± 5.0, ± 7.5, ± 10.0 [%] от исходных значений параметров соответственно группы I, II и III.
При контроле и диагностировании состояния объекта в процессе испытания были осуществлены следующие операции.
1. Измерение текущих значений параметров в контрольных точках объекта в соответствии с указанным перечнем.
2. Сравнение измеренных значений каждого параметра со значениями его исходных пороговых уровней - группа I (± 5.0).
В определенный момент времени τ1 был зафиксирован выход параметра ДГВ за его нижний пороговый уровень.
3. В момент времени τ1 был начат отсчет контрольного интервала времени, величина которого была выбрана предварительно и составила 1 с.
4. В течение контрольного интервала времени последующих выходов параметров зафиксировано не было и, кроме того, не был зарегистрирован возврат параметра ДГВ в пределы исходных пороговых уровней. Поэтому принято решение об отказе датчика параметра ДГВ. Параметр ДГВ был исключен из состава контролируемых, а информация по параметру исключена (для данного испытания) из эталонных описания неисправностей. С момента установления факта отказа датчика параметра ДГВ, контроль состояния объекта был продолжен по оставшимся параметрам. Впоследствии аналогичным образом был установлен факт отказа датчика параметра РГ. В табл. 2 приведены эталонные описания указанных неисправностей после исключения информации по параметрам ДГВ и РГ.
Далее в определенный момент времени τ2 был зафиксирован выход параметра ДГПН за нижний пороговый уровень, после чего осуществлены следующие операции.
5. В момент τ2 был начат отсчет контрольного интервала времени, равный 1 с.
6. Через 0,1 с от момента τ2 был зафиксирован выход параметра ТГГ за верхний пороговый уровень, в результате чего установлен факт неисправного состояния объекта и проведено диагностирование неисправности. Графики поведения контролируемых параметров при анализируемой неисправности, а также расположение исходных и дополнительных пороговых уровней представлено на фиг. 1.
В момент выхода параметра РО (последнего из контролируемых) за исходные пороговые уровни на основании текущих отклонений параметров (см. фиг. 1) в качестве дополнительных была выбрана группа уровней III, т.к. на данный момент параметры ДГПН и ТГГ уже вышли за свои пороговые уровни группы II.
7. По мере выхода параметров за свои исходные (группа I) пороговые уровни было сформировано описание неисправности в виде временной очередности выхода параметров, с учетом направления выхода и выбранного порядка расположения параметров. Получено следующее описание:
ZI = {+2 -3 -4 -1}
8. Сопоставление полученного описания с эталонными выявило его возможную принадлежность к двум наименованиям неисправностей: A3 или A4 (см. табл. 2, левая часть таблицы).
При этом алгоритм диагностирования исключил из рассмотрения эталонные описания A1 и A5 после сопоставления реакции первого параметра (ДГПН - четвертый элемент очередности) вследствие несовпадения направления его изменения, а неисправность A2 - после сопоставления реакции параметра РО. Это сократило диапазон поиска и, соответственно, время диагностирования.
9. Вследствие совпадения полученного описания с двумя эталонными диагностированием продолжено с использованием в качестве пороговых дополнительных уровней группы III (± 10.0).
10. В момент τ3 был зафиксирован выход параметра ТГГ за верхний пороговый уровень группы III и вновь начат отсчет контрольного интервала времени.
11. По мере выхода параметров за свои пороговые уровни группы III было сформировано следующее описание неисправности в виде временной очередности выхода параметров, с учетом направления выхода и выбранного порядка расположения параметров:
ZIII = {+1 -4 -3 -2}
12. Сопоставления полученного описания с эталонными (см. табл. 2, правая часть таблицы) выявило его однозначную принадлежность неисправности A3 - "Разрушение лопаток основной турбины". После этого диагностирование было завершено.
Результат диагностирования был передан в систему управления, после чего было произведено выключение ЖРД. Послепусковая переборка объекта и его дефектация установили факт выкрашивания трех лопаток турбины вследствие накопления усталостных напряжений. Это подтвердило необходимость и своевременность выключения двигателя, и, соответственно, достаточное быстродействие, глубину и достоверность диагностирования. Вместе с тем, известному способу для такой глубины диагностирования (до конкретного узла - основной турбины) потребовалась бы дополнительная установка 13 датчиков. При этом полное время расчета известным способом всех характеристик узлов объектов применительно к регистрирующему вычислительному комплексу ВЛ-1033 составляет около 30 минут.
Структурная схема информационно-измерительной системы (ИИС) для реализации предлагаемого способа приведена на фиг. 2 и включает и себя следующие элементы: объект испытания - 1; коммутирующее устройство - 2; электронно-вычислительную машину (ЭВМ) - 3; магнитные носители информации - 4; устройства сопряжения - 5, 6; устройство аварийного выключения объекта (АВО) - 7, входящее в систему правления (СУ) - 8.
ИИС работает следующим образом. В каждый контролируемый момент времени (определяемый дискретностью опроса датчиков, например, 0.01 с) измеренные значения параметров поступают в виде сигналов от датчиков, установленных на объекте (1), через коммутирующее устройство (2), осуществляющее опросность датчиков с требуемой дискретностью, и устройство сопряжения (5), осуществляющее преобразование сигнала в машинный код ЭВМ. Операции контроля и диагностирования предлагаемого способа реализованы в виде программного обеспечения и введены в ЭВМ (3) перед испытанием. Данные операции осуществляются в темпе испытания, что определяет соответствующие требования к быстродействию ЭВМ.
Результат контроля и диагностирования состояния объекта от ЭВМ (3) через устройство сопряжения (6), осуществляющее преобразование вида сигнала, поступает для регистрации на магнитные носители информации (4) (для послепускового контроля работы системы, оформления результатов контроля и диагностирования и т.д.) и в устройство аварийного выключения (7), являющееся модулем СУ (8) и работающее в следующем режиме. Сигнал от ЭВМ, соответствующий по параметрам установлению факта неисправности определенного типа (в рассмотренном случае - разрушению лопаток основной турбины) воспринимается устройством АВО как команда на экстренное выключение объекта. При других типах неисправности ЭВМ формирует сигналы на выключение объекта по нормальной циклограмме или управляющие сигналы для парирования неисправности и продолжения работы объекта. Момент времени получения команды и циклограмма отключения объекта регистрируется на магнитные носители информации (4) наряду с результатами диагностирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИКИ ПНЕВМОГИДРАВЛИЧЕСКОГО ОБЪЕКТА | 1998 |
|
RU2133055C1 |
| Способ функционального диагностирования жидкостного ракетного двигателя при огневом испытании | 2020 |
|
RU2781738C2 |
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2393450C1 |
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ РАКЕТНОГО ДВИГАТЕЛЯ | 2011 |
|
RU2476850C1 |
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИКИ ПНЕВМОГИДРАВЛИЧЕСКОГО ОБЪЕКТА | 1990 |
|
RU2018900C1 |
| Способ дистанционной диагностики механического транспортного средства | 2015 |
|
RU2615806C1 |
| СПОСОБ ПОИСКА ДЕФЕКТОВ В ЦИФРОВЫХ БЛОКАХ | 2003 |
|
RU2255369C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ПРЕДДЕФЕКТНОГО СОСТОЯНИЯ ТЕХНИЧЕСКОГО ОБЪЕКТА | 2007 |
|
RU2364911C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ СЛУЖЕБНЫХ СИСТЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2559401C1 |
| УСТРОЙСТВО ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ ЦИКЛИЧЕСКИ ФУНКЦИОНИРУЮЩИХ ОБЪЕКТОВ | 2005 |
|
RU2289802C1 |
Изобретение предназначено для контроля и диагностирования состояния пневмогидравлического объекта, работающего в экстремальных условиях. В процессе контроля и диагностирования состояния объекта измеряют параметры в его контрольных точках. Контролируют состояние объекта, сравнивая измеренные значения параметров с их пороговыми уровнями. При нахождении измеренных параметров в пределах исходных пороговых уровней состояние объекта считается нормальным, в противном случае осуществляется диагностирование неисправности, т.е. производится поиск неисправного узла объекта или отказавшего датчика параметра. Диагностирование проводят поэтапно и на каждом этапе фиксируют очередность и направление выхода параметров за их пороговые уровни, в соответствии с которыми диагностируют неисправность. При этом в момент выхода первого из параметров за его пороговый уровень начинают отсчет контрольного интервала времени, в течение которого фиксируют количество параметров, вышедших за свои пороговые уровни. В случае выхода за пороговые уровни более одного параметра устанавливают факт неисправности и определяют дополнительные пороговые уровни измеряемых параметров, которые используют на следующем этапе диагностирования до полной локализации неисправности, а величины дополнительных пороговых уровней выбирают на основе измерений текущих значений параметров на момент распознавания неисправности на предыдущем уровне. Причем в случае выхода за пороговые уровни и последующего возврата в пределы исходных пороговых уровней в течение контрольного интервала времени только одного из параметров принимают решение о его случайном выбросе, а в случае отсутствия возврата - решение об отказе датчика этого параметра. Такой способ позволяет повысить достоверность и глубину диагностирования. 2 ил., 2 табл.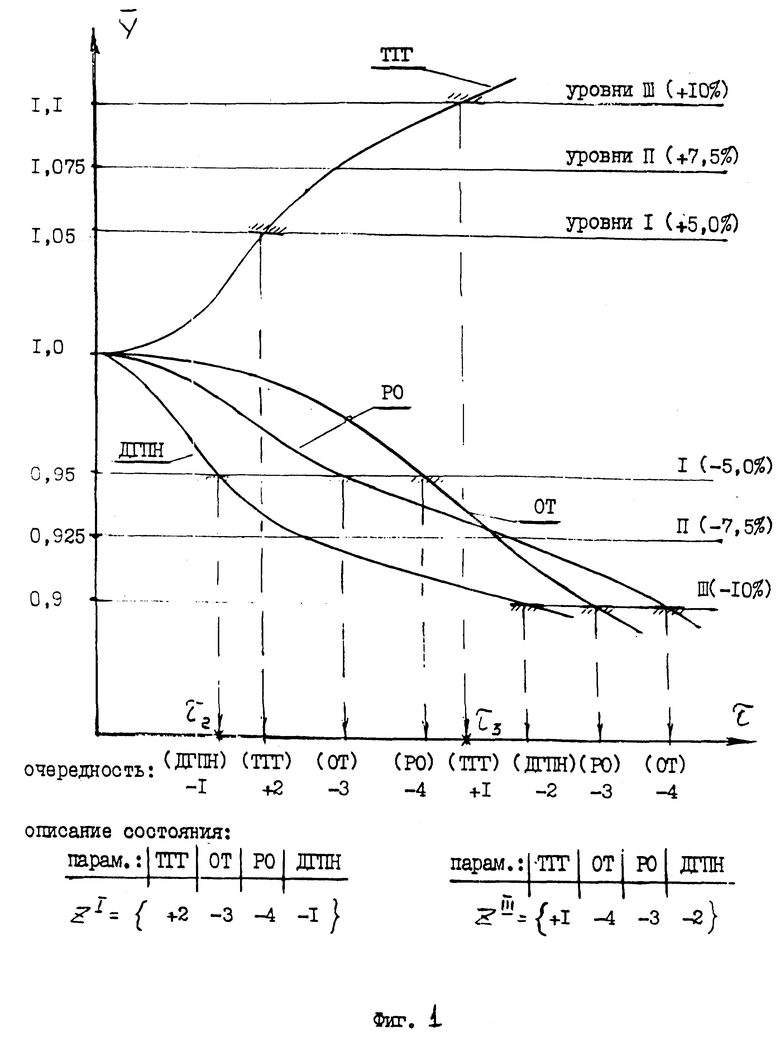
Способ контроля и диагностирования состояния пневмогидравлического объекта, заключающийся в том, что измеряют текущие значения параметров в контрольных точках объекта, сравнивают их со значениями пороговых уровней и диагностируют неисправность в случае выхода параметра за его пороговый уровень, отличающийся тем, что диагностирование проводят поэтапно и на каждом этапе фиксируют очередность и направление выхода параметров за их пороговые уровни, в соответствии с которыми диагностируют неисправность, при этом в момент выхода первого из параметров за его пороговый уровень начинают отсчет контрольного интервала времени, в течение которого фиксируют количество параметров, вышедших за свои пороговые уровни, в случае выхода за пороговые уровни более одного параметра устанавливают факт неисправности и определяют дополнительные пороговые уровни измеряемых параметров, которые используют на следующем этапе диагностирования до полной локализации неисправности, а величины дополнительных пороговых уровней выбирают на основе измерений текущих значений параметров на момент распознавания неисправности на предыдущем уровне, причем в случае выхода за пороговые уровни и последующего возврата в пределы исходных пороговых уровней в течение контрольного интервала времени только одного из параметров принимают решение о его случайном выбросе, а в случае отсутствия возврата - решение об отказе датчика этого параметра.
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИКИ ПНЕВМОГИДРАВЛИЧЕСКОГО ОБЪЕКТА | 1990 |
|
RU2018900C1 |
| Испытания ЖРД/Под ред.Левина В.Я | |||
| - М.: Машиностроение, 1981, с.199 | |||
| SU 1519350 А1, 20.08.96 | |||
| RU 2063622 С1, 10.07.96 | |||
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ПРОТЯЖЕННЫХ СТРИКТУР И ОБЛИТЕРАЦИЙ МОЧЕТОЧНИКА | 2009 |
|
RU2407463C1 |

