Изобретение относится к вертолетам специального назначения, предназначенным для тушения пожаров с высоким классом опасности при помощи взрывных баллонов бросаемых в огонь, а именно противопожарных гранат, и может быть использовано при пожаротушении без присутствия пожарного расчета в непосредственной близости от очага возгорания.
Из уровня техники известен беспилотный авиационный комплекс (RU 187275 U1, МПК В64С 39/02, G01S 13/42, G01S 13/06, опубл. 28.02.2019). Авиационный комплекс представляет собой беспилотный летательный аппарат вертолетного типа, предназначенный для радиолокационно-оптического дозора, выполненный по схеме квадрокоптера, содержащий фюзеляж, балковый держатель, предназначенный для подвески и транспортирования контейнера полезной нагрузки.
Недостатком известного авиационного комплекса является сложность его адаптации для решения задач пожаротушения вследствие того, что согласно техническому решению контейнер предназначен для размещения в нем радиотехнического комплекса, что делает невозможным использования его для установки другой полезной нагрузки, например катапульты для противопожарных гранат.
Наиболее близким техническим решением к заявленной полезной модели и выбранным в качестве прототипа признан беспилотный летательный аппарат для тушения лесных пожаров [RU 2696511 C1, МПК В64С 39/08, B64D 1/16, А62С 3/02, опубл. 02.08.2019). Летательный аппарат построен по схеме биплана, при этом бипланные стойки, установленные по бокам от винтомоторной установки, переходящие в хвостовые балки и заканчивающиеся вертикальными рулями направления, представляют собой сообщающиеся баки для огнегасящей жидкости.
Недостатком известного технического решения является его относительно высокая сложность, кроме того применение летательного аппарата самолетного типа требует наличия подготовленной взлетно-посадочной полосы, что ограничивает область применения аппарата специализированными аэродромными площадками.
Технической задачей, на решение которой направлено заявленное изобретение, является повышение эффективности применения беспилотной летающей платформы для пожаротушения.
Указанная задача решена тем, что беспилотная летающая платформа вертолетного типа для пожаротушения содержит фюзеляж, снабженный двигателями, с закрепленными на валах их роторов пропеллерами, при этом двигатели подключены к полетному контроллеру, выполненному в виде микропроцессорной системы, снабженному программно-аппаратным регулятором оборотов пропеллеров. В нижней части фюзеляжа закреплена балка-держатель, на которой подвешены видеокамера и узел порционного сброса противопожарных гранат, состоящий из корпуса, в верхней части которого установлен бункер, соединенный выдающим патрубком с выпускным окном, выполненным в нижней части корпуса. Дополнительно в нижней части корпуса на подшипнике установлен вал, соединенный механической передачей с ротором электродвигателя, закрепленного на внешней боковой стенке корпуса. На валу закреплены нижний и верхний дисковые отсекатели, с выполненными в их периферийной части чередующимися выступами и пазами, причем выступы нижнего дискового отсекателя расположены под пазами верхнего дискового отсекателя, пазы нижнего дискового отсекателя, расположены под выступами верхнего дискового отсекателя, а в выдающем патрубке на уровне нижнего и верхнего дисковых отсекателей выполнены поперечные проточки. Внутри корпуса закреплен блок управления, выполненный на основе микроконтроллера, снабженный информационным входом, измерительным входом, первым и вторым силовыми выходами, а также Wi-Fi-адаптером беспроводной связи и радиомодулем. К информационному входу подключена видеокамера, к измерительному входу подключен фотоэлемент, первый силовой выход подключен к светоизлучающему элементу, оптически связанному с фотоэлементом, при этом светоизлучающий элемент и фотоэлемент установлены в выпускающем окне, второй силовой выход подключен к электродвигателю, Wi-Fi-адаптер беспроводной связи выполнен с возможностью удаленного подключения к полетному контроллеру, а радиомодуль выполнен с возможностью приема команд от удаленной системы управления и передачи ей телеметрической информации.
Положительным техническим результатом, обеспечиваемым раскрытой выше совокупностью признаков изобретения, является повышение эффективности беспилотной летающей платформы для пожаротушения с одновременным обеспечением безопасности пожарного расчета, за счет применения в конструкции платформы узла порционного сброса противопожарных гранат, выполненного с возможностью его удаленного управления с контролируемым сбросом гранат, и передачи кадров съемки очага возгорания с помощью видеокамеры для обеспечения корректировки пространственного положения платформы и своевременной подачи команд на сброс гранат.
Конструкция беспилотной летающей платформы поясняется чертежами, где на фиг. 1 представлен внешний вид беспилотной летающей платформы; на фиг. 2 показан узел порционного сброса противопожарных гранат в разрезе; на фиг. 3, 4 показана конструкция дисковых отсекателей с взаимным расположением их выступов и пазов; на фиг. 5 показан внешний вид блока управления, а на фиг.6 приведена его структурная схема.
Беспилотная летающая платформа вертолетного типа для пожаротушения устроена следующим образом.
Ее основой является фюзеляж 1, снабженный двигателями 2, с закрепленными на валах их роторов пропеллерами 3, при этом двигатели подключены к полетному контроллеру (на фигурах условно не показан), выполненному в виде микропроцессорной системы, снабженному программно-аппаратным регулятором оборотов пропеллеров. В нижней части фюзеляжа 1 закреплена балка-держатель 4, на которой подвешена видеокамера 5 и узел порционного сброса 6 противопожарных гранат 7, состоящий из корпуса 8, в верхней части которого установлен бункер 9, соединенный выдающим патрубком 10 с выпускным окном 11, выполненным в нижней части корпуса 8. Дополнительно в нижней части корпуса 8 на подшипнике 12 установлен вал 13, соединенный механической передачей с ротором электродвигателя 14, закрепленного на внешней боковой стенке корпуса 8. На валу 13 закреплены нижний и верхний дисковые отсекатели 15 и 16, с выполненными в их периферийной части чередующимися выступами 17 и пазами 18, выступы и пазы упомянутых отсекателей расположены в шахматном порядке, а в выдающем патрубке 10 на уровне нижнего и верхнего дисковых отсекателей 15 и 16 выполнены поперечные проточки 19. Внутри корпуса закреплен блок управления 20, выполненный на основе микроконтроллера, снабженный информационным входом 21, измерительным входом 22, первым и вторым силовыми выходами 23 и 24, а также Wi-Fi-адаптером беспроводной связи 25 и радиомодулем 26, при этом к информационному входу 21 подключена видеокамера 5, к измерительному входу 22 подключен фотоэлемент 27, первый силовой выход 23 подключен к светоизлучающему элементу 28, оптически связанному с фотоэлементом 27, второй силовой выход 24 подключен к электродвигателю 14, Wi-Fi-адаптер беспроводной связи 25 выполнен с возможностью удаленного подключения к полетному контроллеру, а радиомодуль 26 выполнен с возможностью приема команд от удаленной системы управления, выполненной в виде микропроцессорной системы, снабженной радиомодулем, и передачи ей телеметрической информации (на фигурах система управления условно не показана).
Беспилотную летающую платформу изготавливают, преимущественно, из не горючих огнеупорных компонентов, в качестве источника питания платформы целесообразно применение литий-ионного аккумулятора, что делает ее полностью автономной и не требует использования для ее электропитания дополнительного кабеля. В качестве противопожарных гранат 7 узла порционного сброса 6 могут быть использованы, например, самосрабатывающие огнетушители модели Орион Омега1 (1Огнетушитель самосрабатывающий (пожарная граната) АУПП Орион Омега // VK-PRIM. Комплексные поставки инженерного оборудования URL: https://vk-prim.ru/ognetushitel-samosrabatyvayushchiy-pozharnaya-granata-aupp-orion-omega / (дата обращения: 07.04.2021)), состоящие из пенопластового корпуса, выполненного в виде шара, наполненного огнетушащим порошком, по граням которого проходят два пирошнура, срабатывающие при контакте устройства с огнем и активирующие выброс огнетушащего порошка. В качестве электродвигателя 14 целесообразно применить шаговый двигатель, а механическая передача, соединяющая его ротор и вал 13, может быть выполнена цепной или ременной. В качестве микроконтроллера блока управления 20 может быть применена микросхема LPC2478, основанная на микропроцессорном ядре ARM7TDMI-S, работающем на частоте 72 МГц. Информационный вход 21 может представлять собой видеовход, измерительный вход 22 может быть выполнен на основе операционного усилителя, а первый и второй силовые выходы 23 и 24 - на основе транзисторных или тиристорных ключей. Светоизлучающий элемент 28 может представлять собой светодиод, а фотоэлемент 27 - фоторезистор или фотодиод. В качестве радиомодуля 26 может быть применен модем стандарта LoRa модели WLK01S78-TH2 (2Модуль LoRa WLK01S78-TH чип SX1278 // ChipDip.ru. URL: https://amperkot.ru/products/modul_lora_wlk01s78th_chip_sx1278/25202678.html (дата обращения: 12.12.2019)), представляющий собой готовое решение для низкоскоростной передачи малых объемов данных на относительно большие расстояния.
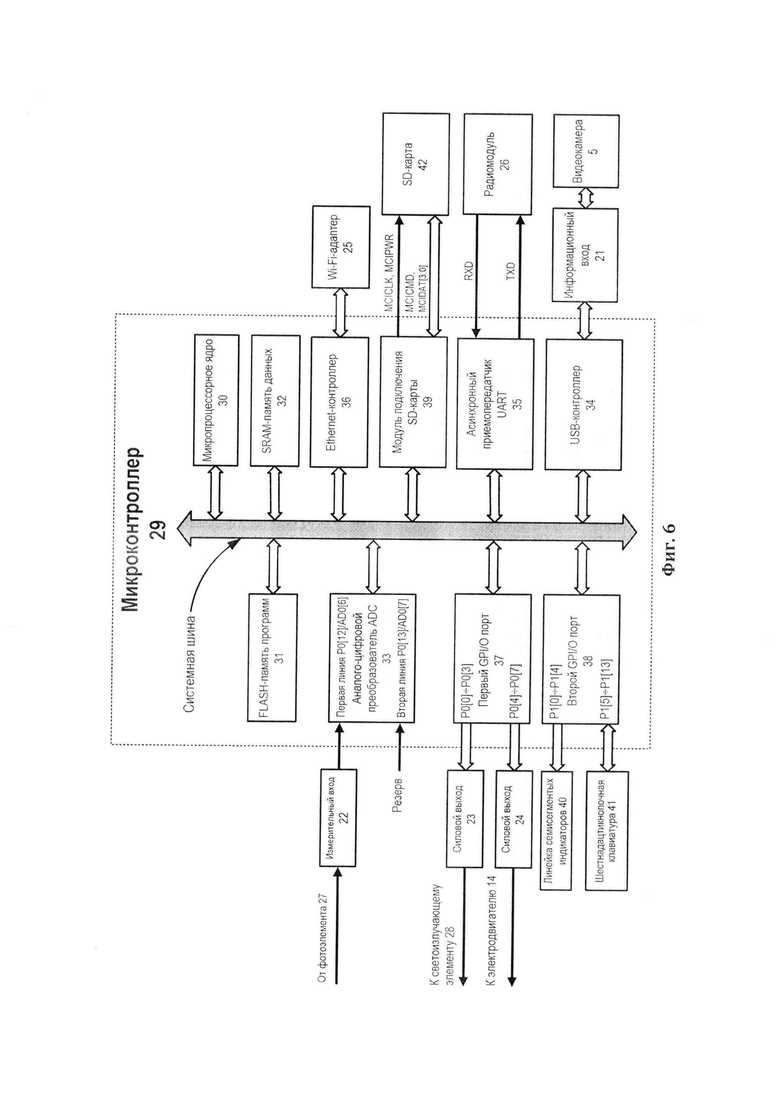
Микроконтроллер 29 блока управления 20 содержит микропроцессорное ядро 30, соединенное с помощью системной шины с FLASH-памятью программ 31, SRAM-памятью данных 32, многоканальным аналого-цифровым преобразователем ADC 33, USB-контроллером 34, универсальным асинхронным приемопередатчиком UART 35, Ethernet-контроллером 36, интерфейсом ввода/вывода общего назначения, сгруппированного, по крайней мере, в два GPI/O-порта ввода-вывода 37 и 38, и модулем подключения SD-карты 39.
К первой (P0[12]/AD06) линии аналого-цифрового преобразователя ADC 33 подключен измерительный вход 22, вторая линия (P0[13]/AD07) и последующие оставлены в качестве резерва, к USB-контроллеру 34 подключен информационный вход 21, универсальный асинхронный приемопередатчик UART 35 подключен к радиомодулю 26, к Ethernet-контроллеру 36 подключен Wi-Fi-адаптер 25, первые четыре линии (Р0[0]÷Р0[3]) первого GPI/O-порта ввода-вывода 37 подключены к первому силовому выходу 23, его вторые четыре линии (Р0[4]÷Р0[7]) подключены ко второму силовому выходу 24, к пяти первым линиям (Р1[0]÷Р1[5]) второго GPI/O-порта ввода-вывода 38 подключена линейка семисегментных индикаторов 40, к восьми последующим линиям (Р1[5]÷Р1[13]) второго GPI/O-порта ввода-вывода 38 подключена шестнадцатикнопочная клавиатура 41, а к модулю подключения SD-карты 39 может быть подключено устройство для чтения карт памяти (card reader), в которое установлена и электрически соединена с модулем SD-карта 42.
Беспилотную летающую платформу вертолетного типа для пожаротушения применяют следующим образом.
Первоначально на фюзеляже 1 беспилотной платформы закрепляют балку-держатель 4, подвешивают на нее видеокамеру 5 и узел порционного сброса 6 противопожарных гранат 7, подключив видеокамеру 5 информационному входу 21 блока управления 20. Затем активируют блок управления 20 с помощью клавиши «Пуск» 43, после чего запускается управляющая программа микроконтроллера 29, хранящаяся во FLASH-памяти программ 31, реализующая пользовательский интерфейс оператора с помощью линейки семисегментных индикаторов 40 и шестнадцатикнопочной клавиатуры 41. Оператор платформы осуществляет калибровку устройства с помощью клавиатуры и линейки индикаторов, заключающуюся в настройке режимов съемки видеокамеры 5, осуществляемой через USB-контроллер 34 и информационный вход 21, конфигурировании параметров Ethernet-контроллера 36 и Wi-Fi-адаптера 25, для осуществления обмена данными между микроконтроллером 29 и полетным контроллером платформы, а также в настройке асинхронного приемопередатчика UART 35 и радиомодуля 26 для приема команд от удаленной системы управления платформой и передачи упомянутой системе телеметрической информации о состоянии узла порционного сброса 6.
Далее оператор платформы, управляя электродвигателем 14 с помощью клавиатуры 41, поворачивает отсекатели 15 и 16 таким образом, чтобы один из выступов нижнего отсекателя 15 и один из пазов верхнего отсекателя 16 вошли в соответствующие им проточки 19, при этом выступ отсекателя 15 перекрывает выдающий патрубок 10, а паз отсекателя 16 обеспечивает свободный доступ гранатам, поступающим в патрубок 10, в область 43 между упомянутыми отсекателями. После этого в бункер 9 засыпают противопожарные гранаты 7, которые, заполняя его, поступают в выдающий патрубок 10, образуя очередь, останавливаемую выступом нижнего отсекателя 15. Далее оператор настраивает с помощью клавиатуры 41 параметры работы электродвигателя 14 и счетчик гранат 7, сохраняя их значения на SD-карте 42, вводит задание в полетный контроллер с помощью штатного пульта управления беспилотной летающей платформой, переводит блок управления 20 узла порционного сброса 6 противопожарных гранат 7 с помощью клавиатуры 41 в автоматический режим работы, после чего запускает беспилотную платформу в зону пожара. Дальнейшая работа узла порционного сброса 6 гранат 7 осуществляется автоматически микропроцессорным ядром 30 на основе управляющей программы, хранящейся во FLASH-памяти программ 31 с использованием для промежуточного хранения данных SRAM-памяти данных 32.
Во время полета над очагом возгорания микроконтроллер 29 блока управления 20 осуществляет видеосъемку места пожара с помощью видеокамеры 5 и передает отснятые кадры с помощью Wi-Fi-адаптера 25 через Ethernet-контроллер 36 полетному контроллеру и далее оператору платформы. Последний, при помощи удаленной системы управления платформой, оценивает оперативную обстановку и, приняв решение о начале тушения, подает блоку управления 20 команду на сброс гранаты 7. Микроконтроллер 29 блока управления 20, выполняя итерационный опрос асинхронного приемопередатчика 35, получает от радиомодуля 26 команду на сброс очередной гранаты, после чего с помощью линий Р0[4]÷Р0[7] через силовой выход 24 активирует электродвигатель 14, осуществляя поворот отсекателей 15 и 16 таким образом, что выступ верхнего отсекателя 16 перекрывает выдающий патрубок 10, а паз нижнего отсекателя 15 открывает зону 43 между отсекателями, обеспечивая сброс гранаты 7. Во время выполнения операции сброса микроконтроллер 29 с помощью линий Р0[0]÷Р0[3] через силовой выход 23 активирует светоизлучающий элемент 28, одновременно с этим осуществляя опрос состояния фотоэлемента 27 и фиксирует по прерыванию светового потока фотоэлементом 27 успешный сброс гранаты 7. Затем микроконтроллер 29 блока управления 20 повторно активирует электродвигатель 14, осуществляя поворот отсекателей 15 и 16 таким образом, что выступ верхнего нижнего отсекателя 15 перекрывает выдающий патрубок 10, а паз верхнего отсекателя 16 открывает зону 43 между отсекателями, обеспечивая загрузку очередной гранаты 7 в зону между отсекателями. Далее микроконтроллер 29 через асинхронный приемопередатчик UART 35 с помощью радиомодуля 26 отправляет удаленной системе управления отчет об успешном сбросе гранаты и числе оставшихся гранат 7 в бункере 9. При окончании сброса гранат беспилотную летающую платформу возвращают, производят перезагрузку бункера 9, после чего платформа готова к продолжению тушения возгорания. После окончания пожаротушения узел порционного сброса 6 выключают с помощью кнопки «Останов» 44 блока управления 20.
Опытный образец беспилотной летающей платформы показал себя эффективным средством для пожаротушения, имеющим малый вес (максимальный взлетный вес летательного аппарата с гранатами составляет около 30 кг), при этом вес снаряженного узла порционного сброса 6 противопожарных гранат 7 составляет 15 кг, время нахождения платформы в воздухе на позиции тушения составляет 40 минут, а максимальное удаление от наземной базовой станции может достигать 50 км.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотная летательная платформа вертолётного типа с пневмомеханическим устройством для тушения пожаров | 2023 |
|
RU2814718C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| Способ электропитания бортовой аппаратуры высотной привязной платформы, построенной беспилотным летательным аппаратом | 2024 |
|
RU2841215C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2828471C1 |
| БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО МУЛЬТИРОТОРНОГО ТИПА (БВС) ДЛЯ ТРАНСПОРТИРОВКИ МАЛОГАБАРИТНЫХ ГРУЗОВ | 2023 |
|
RU2823830C1 |
| Способ применения БПЛА и система осуществления способа | 2023 |
|
RU2828920C1 |
| Беспилотный транспортный модуль и способ его применения | 2024 |
|
RU2825031C1 |
| Малогабаритный летательный аппарат (ЛА) вертикального взлета/посадки с увеличенной дальностью полета | 2017 |
|
RU2681464C1 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
| БЕСПИЛОТНЫЙ САМОЛЕТ (ВАРИАНТЫ) | 2015 |
|
RU2613629C2 |
Беспилотная летающая платформа вертолетного типа для пожаротушения содержит фюзеляж, снабженный двигателями, с закрепленными на валах их роторов пропеллерами, блок управления, Wi-Fi-адаптер беспроводной связи и радиомодуль, при этом в нижней части фюзеляжа закреплена балка-держатель, на которой подвешены видеокамера и узел порционного сброса противопожарных гранат, выполненный определенным образом. Обеспечивается повышение эффективности пожаротушения. 13 з.п. ф-лы, 6 ил.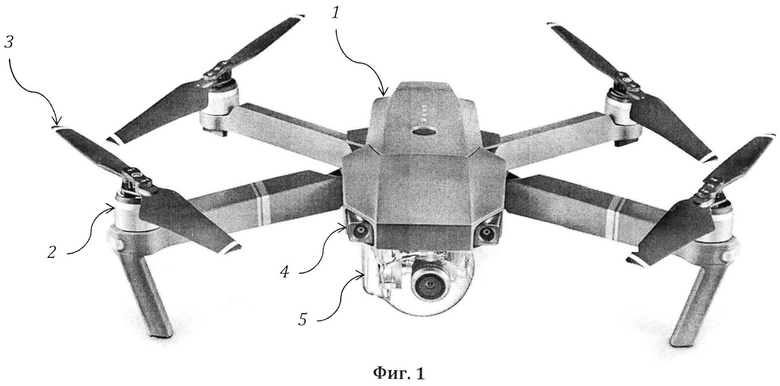
1. Беспилотная летающая платформа вертолетного типа для пожаротушения, содержащая фюзеляж, снабженный двигателями, с закрепленными на валах их роторов пропеллерами, при этом двигатели подключены к полетному контроллеру, выполненному в виде микропроцессорной системы, снабженному программно-аппаратным регулятором оборотов пропеллеров, отличающаяся тем, что в нижней части фюзеляжа закреплена балка-держатель, на которой подвешены видеокамера и узел порционного сброса противопожарных гранат, состоящий из корпуса, в верхней части которого установлен бункер, соединенный выдающим патрубком с выпускным окном, выполненным в нижней части корпуса; дополнительно в нижней части корпуса на подшипнике установлен вал, соединенный механической передачей с ротором электродвигателя, закрепленного на внешней боковой стенке корпуса; на валу закреплены нижний и верхний дисковые отсекатели, с выполненными в их периферийной части чередующимися выступами и пазами, причем выступы нижнего дискового отсекателя расположены под пазами верхнего дискового отсекателя, пазы нижнего дискового отсекателя, расположены под выступами верхнего дискового отсекателя, а в выдающем патрубке на уровне нижнего и верхнего дисковых отсекателей выполнены поперечные проточки; внутри корпуса закреплен блок управления, выполненный на основе микроконтроллера, снабженный информационным входом, измерительным входом, первым и вторым силовыми выходами, а также Wi-Fi-адаптером беспроводной связи и радиомодулем; к информационному входу подключена видеокамера, к измерительному входу подключен фотоэлемент, первый силовой выход подключен к светоизлучающему элементу, оптически связанному с фотоэлементом, при этом светоизлучающий элемент и фотоэлемент установлены в выпускающем окне; второй силовой выход подключен к электродвигателю, Wi-Fi-адаптер беспроводной связи выполнен с возможностью удаленного подключения к полетному контроллеру, а радиомодуль выполнен с возможностью приема команд от удаленной системы управления и передачи ей телеметрической информации.
2. Беспилотная летающая платформа по п. 1, отличающаяся тем, что в качестве противопожарных гранат узла порционного сброса могут быть использованы самосрабатывающие огнетушители, состоящие из пенопластового корпуса, выполненного в виде шара, наполненного огнетушащим порошком, по граням которого проходят два пирошнура, срабатывающие при контакте устройства с огнем и активирующие выброс огнетушащего порошка.
3. Беспилотная летающая платформа по п. 1, отличающаяся тем, что в качестве электродвигателя применен шаговый двигатель.
4. Беспилотная летающая платформа по п. 1, отличающаяся тем, что механическая передача, соединяющая ротор электродвигателя и вал выполнена цепной.
5. Беспилотная летающая платформа по п. 1, отличающаяся тем, что механическая передача, соединяющая ротор электродвигателя и вал выполнена ременной.
6. Беспилотная летающая платформа по п. 1, отличающаяся тем, что в качестве микроконтроллера блока управления 20 применена микросхема LPC2478, основанная на микропроцессорном ядре ARM7TDMI-S, работающем на частоте 72 МГц.
7. Беспилотная летающая платформа по п. 1, отличающаяся тем, что измерительный вход выполнен на основе операционного усилителя.
8. Беспилотная летающая платформа по п. 1, отличающаяся тем, что первый и второй силовые выходы выполнены на основе транзисторных ключей.
9. Беспилотная летающая платформа по п. 1, отличающаяся тем, что первый и второй силовые выходы выполнены на основе тиристорных ключей.
10. Беспилотная летающая платформа по п. 1, отличающаяся тем, что светоизлучающий элемент представляет собой светодиод.
11. Беспилотная летающая платформа по п. 1, отличающаяся тем, что фотоэлемент представляет собой фоторезистор.
12. Беспилотная летающая платформа по п. 1, отличающаяся тем, что фотоэлемент представляет собой фотодиод.
13. Беспилотная летающая платформа по п. 1, отличающаяся тем, что в качестве радиомодуля применен модем стандарта LoRa модели WLK01S78-TH.
14. Беспилотная летающая платформа по п. 1, отличающаяся тем, что микроконтроллер блока управления содержит микропроцессорное ядро, соединенное с помощью системной шины с FLASH-памятью программ, SRAM-памятью данных, многоканальным аналого-цифровым преобразователем ADC, USB-контроллером, универсальным асинхронным приемопередатчиком UART, Ethernet-контроллером, интерфейсом ввода/вывода общего назначения, сгруппированного, по крайней мере, в два GPI/O-порта ввода-вывода, и модулем подключения SD-карты.
| Авиационный комплекс обнаружения и тушения очагов возгорания и способ его применения | 2017 |
|
RU2674640C1 |
| БЕСПИЛОТНЫЕ АВИАЦИОННЫЕ СИСТЕМЫ ДЛЯ БОРЬБЫ С ПОЖАРАМИ | 2013 |
|
RU2585557C1 |
| CN 107458602 A, 12.12.2017 | |||
| CN 109178309 A, 11.01.2019 | |||
| CN 106955437 A, 18.07.2017 | |||
| CN 209097014 U, 12.07.2019. | |||

