Изобретение относится к области авиационной техники, а именно к беспилотным летательным аппаратам (БЛА) и комплексам в области специальной техники, являющимся дистанционно управляемым или автономно управляемым летательным аппаратом.
Известна автоматизированная система обнаружения радиоактивных материалов (см. RU 128868 U1, 10.06.2013), включающая в себя, по меньшей мере, один беспилотный летательный аппарат и, по меньшей мере, один наземный пункт управления, причем беспилотный летательный аппарат включает в себя корпус с посадочными опорами, силовую установку, соединенную, по меньшей мере, с одним пропеллером, детектор радиоактивного излучения, видеокамеру, бортовой блок управления, устройство сбора и обработки информации, соединенное с ним навигационное оборудование определения местоположения, автономный источник электропитания, и может быть использован для обнаружения радиоактивных материалов, а также мониторинга радиационного фона в труднодоступных участках местности. Согласно полезной модели силовая установка беспилотного летательного аппарата имеет, по меньшей мере, три двигателя, закрепленных на корпусе, на которых установлены, по меньшей мере, по одному пропеллеру, оси которых расположены вниз, вдоль силы тяжести, и вращающиеся в одной плоскости.
Недостатком этого известного технического решения можно считать сложность, связанную определением силы тяжести корпуса с расположенными на нем неравномерно двигателями, видеокамерами, детектором радиоактивного излучения и другой бортовой аппаратурой.
Наиболее близким техническим решением к предлагаемому является принятый авторами за прототип модульный беспилотный летательный аппарат с системой защиты тяговых винтов (см. RU 2752110 С1, 22.07.2021). Данный беспилотный летательный аппарат имеет жесткий несущий каркас, на одной центральной оси расположены и жестко закреплены два противоположно вращающихся двигателя с автоматами перекоса фиксированного размера воздушных винтов. Восемь полых герметичных модулей, жестко скрепляемых с несущей рамой и друг с другом через уплотнители, образуют жесткий аэродинамический профиль с защитной сеткой сверху и снизу с двигателями и воздушными винтами внутри. Питающие элементы движителей, система управления с навигацией, устройство сбора и обработки информации расположены внутри герметичных полыхмодулей, позволяющих приземляться на твердую и водную поверхностью с возможностью последующего взлета. Несущий жесткий каркас и модули БЛА выполнены из высокопрочного пластика, обеспечивающего жесткость, надежность и малый вес конструкции. Обеспечивается создание модульной конструкции, позволяющей осуществлять посадку и взлет БЛА с твердой и водной поверхностей.
К недостатку этого беспилотного летательного аппарата можно отнести узкий диапазон функциональной возможности аппарата в зависимости от его географического места положения.
Техническим результатом предлагаемого технического решения является расширение диапазона функциональной возможности беспилотного летательного аппарата.
Технический результат достигается тем, что в беспилотный летательный аппарат, включающий каркас, электродвигатель с воздушными винтами, видеокамеру, питающий элемент и устройство сбора и обработки информации, введены полетный контроллер, распределитель напряжения, первый шаговый двигатель с регулируемыми двумя мини-лыжами, причем каркас, снабженный четырьмя колесными роликами, регулируемыми вторым шаговым двигателем, мини-лыжи и воздушные винты выполнены из бамбука, выход питающего элемента соединен с входом распределителя напряжения, первый, второй и третий, выходы распределителя напряжения соответственно подключены к видеокамере, полетному контроллеру по питанию и устройству сбора и обработки информации по питанию, выход последнего соединен с входом полетного контроллера, первый, второй и третий выходы полетного контроллера соответственно подключены к электродвигателю с воздушными винтами, первому шаговому двигателю с регулируемыми двумя мини-лыжами и второму шаговому двигателю с регулируемыми четырьмя колесными роликами. При этом электродвигатель выполнен поворотным с возможностью вращения воздушных винтов в параллельной и перпендикулярной плоскостях относительно бамбукового каркаса.
Сущность заявляемого изобретения, характеризуемого совокупностью указанных выше признаков, состоит в том, что на базе поворотного электродвигателя с вращающимся воздушными винтами в параллельной и перпендикулярной плоскостях относительно бамбукового каркаса, четырех регулируемых колесных роликов и двух мини-лыж можно обеспечить мобильность беспилотного летательного аппарата, заключающейся в его передвижении по воздуху, земле, воде и снегу.
Наличие в заявляемом устройстве совокупности перечисленных существующих признаков, позволяет решить задачу создания мобильного беспилотного летательного аппарата, благодаря применению в его конструкции поворотного электродвигателя с вращающимся воздушными винтами в параллельной и перпендикулярной плоскостях относительно бамбукового каркаса, регулируемых четырех колесных роликов и двух мини-лыж с желаемым техническим результатом, т.е. расширением диапазона функциональной возможности беспилотного летательного аппарата.
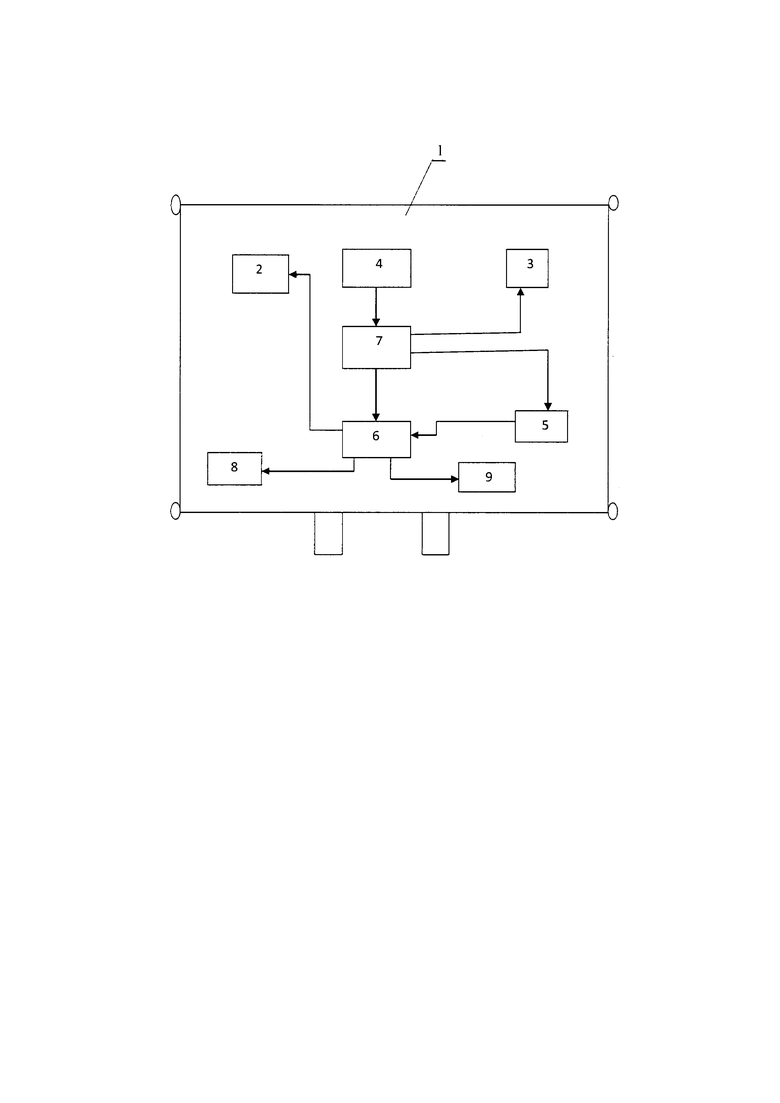
На чертеже схематически представлено предложенное техническое решение.
Беспилотный летательный аппарат содержит каркас 1 с четырьмя колесными роликам, электродвигатель с воздушными винтами 2, видеокамеру 3, питающий элемент 4, устройство сбора и обработки информации 5, полетный контроллер 6, распределитель напряжения 7, первый и шаговый двигатель с регулируемыми мини-лыжами 8 и второй шаговый двигатель с регулируемыми колесными роликами 9.
Все содержащие элементы беспилотного аппарата расположены на его бамбуковом каркасе.
Беспилотный летательный аппарат работает следующим образом. Перед запуском аппарата вверх, поворотный электродвигатель с воздушными винтами 2 должен располагаться на каркасе 1 с четырьмя колесными роликами вертикально относительно каркаса так, чтобы его воздушные винты вращались в параллельной плоскости относительно поверхности каркаса. После этого от питающего элемента 4 питание через распределитель напряжения 7, устройство сбора и обработки информации 5 и полетный контроллер 6 (первый выход контроллера), подают на электродвигатель с воздушными бамбуковыми пропеллерами. В силу этого вращение винтов приводит к вытеснению воздуха в вертикальной плоскости воздуха с созданием тяги, толкающей летательный аппарат вверх (ротор толкает воздух вниз, воздух толкает ротор вверх). При этом сила, направленная вверх, должна быть больше веса и вертикальной силы тяжести. В результате беспилотный аппарат поднимается вверх на определенную высоту от земли и можно произвести разные манипулирования в зависимости от характера поставленной задачи, например, доставка груза по воздуху до заранее известной местности или проведение мониторинга окружающей среды с высоты. По окончании работы в воздухе, аппарат сажают на землю благодаря сигналу, полученному от пульта управления устройством сбора и обработки информации, снабженным приемником. Пульт управления на фигуре не показан. Для спуска вниз требуется выполнения полной противоположности подъему. Уменьшается тяга, чтобы сила была направлена вниз.
По принципу работы предлагаемый мобильный беспилотный аппарат, помимо полета в воздухе, может передвигаться по земле, воде и снегу.
Для передвижения аппарата по земле, воде и снегу, положение поворотного электродвигателя с воздушными винтами меняют так, чтобы электродвигатель располагался на каркасе горизонтально, т.е. положение двигателя, при котором, его пропеллеры должны вращаться в перпендикулярной плоскости относительно каркаса. При этом движение аппарата по земле производится с помощью четырех регулируемых колесных роликов, закрепленных в разных симметричных точках бамбукового каркаса с нижней его стороны. Предварительно регулируемые мини-лыжи, расположенные также на нижней стороне каркаса по его центру, благодаря сигналу первого шагового двигателя 8, прошедшему через устройство сбора и обработки информации, обработанному в полетном контроллере и снимаемому со второго выхода пролетного контроллера, поднимаются вверх так, чтобы они не препятствовали колесам вращаться по земле. В других случаях, в частности при передвижении аппарата по снегу и воде, мини-лыжи опускают вниз так, чтобы колесные ролики не создавали помеху лыжам, скользящим по поверхности снега и воды. При передвижении аппарата по земле, воде и снегу, горизонтальная тяга, способствующая передвижению аппарата в горизонтальной плоскости, создается за счет вытеснения воздуха в его горизонтальной плоскости, т.е. ротор толкает воздух назад, воздух толкает ротор вперед. При этом горизонтальная толкающая сила должна быть больше силы трения колес с землей, лыж с поверхностью воды и снега, а также силы лобового сопротивления движению встречного потока воздуха.
Видеокамера 3, расположенная на каркасе летательного аппарата и выполненная в виде видеопередатчика, передает сигнал на землю в виде радиоволны. Передаваемый сигнал видеокамеры улавливается пультом управления, выполненным в виде приемника - пульта управления, находящегося на земле. В процессе передвижения летательного аппарата происходит непрерывная двусторонняя передача данных между аппаратом и оператором на земле в реальном времени.
Согласно работе предлагаемого мобильного летательного аппарата все манипуляции, связанные с взлетом аппарата в воздух, передвижением по воздуху и поворотом в воздухе, спуском аппарата на землю, передвижением по земле, воде и снегу и другими комбинациями, выполняются с помощью пульта управления и видеокамеры, транслирующей видеоизображения в реальном времени. Благодаря пульту управления под его воздействием на устройство сбора и обработки информации и полетный контроллер, можно произвести изменения скорости вращения воздушных винтов и направления движения по курсу.
В предлагаемом техническом решении благодаря наличию первого и второго шаговых двигателей, предусмотрена, дополнительно, возможность поворота летательного аппарата при его передвижении по земле, воде и снегу. Для этого, например, при передвижении по земле, сигнал от пульта управления, улавливаемый устройством сбора и обработки информации, и поступающий на полетный контроллер, после обработки в последнем (третий выход контроллера), воздействует на второй шаговый двигатель 9, чтобы регулируемые ролики изменили положения в зависимости от направления поворотного движения аппарата. В случае передвижения (скольжение) аппарата по снегу и воде, обработанный в полетном контроллере соответствующий сигнал (второй выход контроллера) воздействует на первый шаговый двигатель, чтобы мини-лыжи изменили положение в зависимости от направления поворота летающего аппарата. При этом колесные ролики и мини-лыжи при поворотах летательного аппарата не должны создавать препятствия друг другу.
Таким образом, в предлагаемом техническом решении на базе поворотного электродвигателя с вращающимися воздушными винтами в параллельной и перпендикулярной плоскостях относительно бамбукового каркаса, регулируемых четырех колесных роликов и двух мини-лыж, можно обеспечить расширение диапазона функциональной возможности беспилотного летательного аппарата.
Предлагаемый беспилотный летательный аппарат благодаря выполнению его каркаса, мини-лыж и пропеллеров из бамбука (относительно малый вес), а также широким диапазоном функциональной возможности, может найти широкое применение для решения многих народнохозяйственных задач, например, в логистике.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ электропитания бортовой аппаратуры высотной привязной платформы, построенной беспилотным летательным аппаратом | 2024 |
|
RU2841215C1 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
| Беспилотный летательный аппарат для определения содержания питательных веществ растений в почве | 2024 |
|
RU2827242C1 |
| Беспилотная летательная платформа вертолётного типа с пневмомеханическим устройством для тушения пожаров | 2023 |
|
RU2814718C1 |
| Модульный беспилотный летательный аппарат с системой защиты тяговых винтов | 2020 |
|
RU2752110C1 |
| БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО МУЛЬТИРОТОРНОГО ТИПА (БВС) ДЛЯ ТРАНСПОРТИРОВКИ МАЛОГАБАРИТНЫХ ГРУЗОВ | 2023 |
|
RU2823830C1 |
| Беспилотный летательный аппарат вертолётного типа | 2022 |
|
RU2799689C1 |
| БЕСПИЛОТНАЯ ЛЕТАЮЩАЯ ПЛАТФОРМА ВЕРТОЛЕТНОГО ТИПА ДЛЯ ПОЖАРОТУШЕНИЯ | 2022 |
|
RU2781919C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| СПОСОБ МОНТАЖА МАРКЕРОВ, ЗАКРЕПЛЯЕМЫХ НА ПРОВОДАХ И МОЛНИЕЗАЩИТНЫХ ТРОСАХ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ, С ПОМОЩЬЮ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ВАРИАНТЫ) | 2016 |
|
RU2644420C1 |
Беспилотный летательный аппарат содержит каркас, снабженный четырьмя колесными роликами, электродвигатель с воздушными винтами, две мини-лыжи, три шаговых двигателя, полетный контроллер, питающий элемент, распределитель напряжения, видеокамеру, при этом каркас, мини-лыжи и воздушные винты выполнены из бамбука. Обеспечивается расширение диапазона функциональной возможности беспилотного летательного аппарата. 1 з.п. ф-лы, 1 ил.
1. Беспилотный летательный аппарат, содержащий каркас, электродвигатель с воздушными винтами, видеокамеру, питающий элемент и устройство сбора и обработки информации, отличающийся тем, что в него введены полетный контроллер, распределитель напряжения, первый шаговый двигатель с регулируемыми двумя мини-лыжами, при этом каркас, снабженный четырьмя колесными роликами, регулируемыми вторым шаговым двигателем, мини-лыжи и воздушные винты выполнены из бамбука, выход питающего элемента соединен с входом распределителя напряжения, первый, второй и третий, выходы распределителя напряжения соответственно подключены к видеокамере, полетному контроллеру по питанию и устройству сбора и обработки информации по питанию, выход последнего соединен с входом полетного контроллера, первый, второй и третий выходы полетного контроллера соответственно подключены к электродвигателю с воздушными винтами, первому шаговому двигателю с регулируемыми двумя мини-лыжами и третьему шаговому двигателю с регулируемыми четырьмя колесными роликами.
2. Летательный аппарат по п. 1, отличающийся тем, что электродвигатель выполнен поворотным с возможностью вращения воздушных винтов в параллельной и перпендикулярной плоскостях относительно бамбукового каркаса.
| Трансформируемый самолет-амфибия вертикального взлета и посадки | 2017 |
|
RU2662311C1 |
| АВИАТРАНСФОРМЕР, ПРЕОБРАЗУЕМЫЙ В АВТОМОБИЛЬ | 2016 |
|
RU2650257C1 |
| СОСТАВНОЕ ЛЕТАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2019 |
|
RU2725866C1 |
| Способ сопряжения бьефов поверхностным режимом и устройство для осуществления способа | 1956 |
|
SU109738A1 |
| Сборная нивелирная рейка | 1959 |
|
SU124642A1 |
| ФЕРРИТОВЫЙ МАТЕРИАЛ | 2014 |
|
RU2543523C1 |

