Область техники, к которой относится изобретение
Изобретение относится к области пожарной техники, в частности к беспилотным летательным аппаратам (БПЛА), оборудованным для тушения пожаров, и может быть использовано для тушения различных пожаров без присутствия пожарного расчета как на открытой местности, так и в помещениях.
Уровень техники
Известен роботизированный беспилотный летательный аппарат для мониторинга территории пожаров, террористических актов и техногенных катастроф, содержащий фюзеляж, движитель, бортовую аппаратуру и молекулярный источник энергии, использующий воду в качестве расходного рабочего вещества, причем бортовая аппаратура включает средства мониторинга, связи и управления. Фюзеляж выполнен в виде несущей рамы, движитель содержит не менее трех несущих винтов, а молекулярный источник энергии, использующий воду в качестве расходного рабочего вещества, выполнен в виде генератора шаровой молнии или в виде электролитического мотора с генератором электрического тока для электропитания бортовой аппаратуры и вращения несущих винтов, причем молекулярный источник энергии установлен в центре рамы, а несущие винты - по ее периферии (пат. RU2557857, опубл. 31.03.2014).
Недостатком указанного устройства является то, что оно используется только для поиска пожара и недостаточно полно описано возможность использования для его ликвидации.
Из уровня техники известен беспилотный летательный аппарат, предназначенный для тушения пожаров, включающий корпус, двигатель, ротор, матрицу датчиков, блок управления, трос.
Данный беспилотный летательный аппарат тушит пожар с воздуха, оставаясь привязанным к земле с помощью тросовой системы, созданной для обеспечения БПЛА питанием и огнетушащим составом. БПЛА предпочтительно имеет электрическое питание и стабилизируется в воздухе с помощью системы гироскопов, созданных для работы совместно с рядом электродвигателей, способных двигаться, чтобы противодействовать силе отдачи, проявляемой при выходе воды из сопла троса. Блок управления на земле снабжает БПЛА электроэнергией и водой через трос. Беспилотный летательный аппарат предпочтительно хранится внутри и запускается с блока управления. Органы управления и показания датчиков передаются контроллеру независимо от того, является ли он автономным или человеком на земле, предпочтительно в пределах или вблизи блока управления (пат. US20130134254A1, опубл. 29.11.2011).
Недостатком указанного устройства является то, что оно привязано к конкретному источнику тока и огнетушащего вещества, что не позволяет быть ему автономным.
Наиболее близким по технической сущности является беспилотная летающая платформа (БЛП) вертолетного типа для пожаротушения, содержащая фюзеляж, снабженный двигателями, с закрепленными на валах их роторов пропеллерами, блок управления, Wi-Fi-адаптер беспроводной связи и радиомодуль, при этом в нижней части фюзеляжа закреплена балка-держатель, на которой подвешены видеокамера и узел порционного сброса противопожарных гранат, выполненный определенным образом. (пат. RU2781919, опубл. 20.10.2022).
Недостатком указанной БЛП является то, что она при тушении осуществляет порционный вертикальный сброс противопожарных гранат, что делает невозможным использование ее для точного выстраивания огнетушащего вещества.
Раскрытие изобретения
Задачей предлагаемого изобретения является создание устройства для тушения пожаров на базе беспилотной летательной платформы вертолётного типа, имеющей низкую себестоимость и простую конструкцию, а также повышение эффективности тушения пожаров за счет использования капсул с огнетушащим веществом.
Технический результат, который может быть получен с помощью предлагаемого изобретения, сводится к достижению возможности поиска источника пожара и ликвидации его, повышению эффективности процесса тушения пожара.
Указанный технический результат достигается тем, к беспилотной летающей платформе вертолетного типа для пожаротушения, содержащей силовую раму, снабженную двигателями, с закрепленными на валах их пропеллерами, при этом двигатели подключены к полетному контроллеру, выполненному в виде микропроцессорной системы, снабженному программно-аппаратным регулятором оборотов лопастей, в нижней части корпуса которой закреплена балка-держатель, внутри корпуса балки-держателя закреплен блок управления, выполненный на основе микроконтроллера, снабженный информационным входом, измерительным входом, первым и вторым силовыми выходами, а также Wi-Fi-адаптером беспроводной связи и радиомодулем, к информационному входу подключена видеокамера, к измерительному входу подключен тепловизор, первый силовой выход подключен к пневмомеханическому устройству, второй силовой выход подключен к электродвигателю гиростабилизированной платформы, Wi-Fi-адаптер беспроводной связи выполнен с возможностью удаленного подключения к полетному контроллеру, а радиомодуль выполнен с возможностью приема команд от удаленной системы управления, добавлен в нижней части корпуса на балке-держателе резервуар для хранения и подачи капсул с огнетушащим веществом, состоящих из корпуса, выполненного в виде шара, наполненного огнетушащим веществом, внутри которого расположен детонатор, срабатывающий при контакте капсулы с огнем, и активирующих выброс огнетушащего вещества, а в качестве видеосъемки места пожара с помощью видеокамеры применено устройство для прицеливания, состоящее из камеры, лазерного термометра и тепловизора, контроль работы которых осуществляет автономная система информационно-управляющей поддержки, в качестве узла порционного сброса применено пневмомеханическое устройство, в котором из резервуара для хранения и подачи капсула с огнетушащим веществом под действием силы тяжести поступает в ствол, откуда выстреливается с помощью нагнетания воздуха, происходящего за счёт натягивания пружины с помощью электромеханического привода, за счет отпускания этой пружины происходит высвобождение поршня внутри корпуса и движение вперед капсулы с огнетушащим веществом в стволе.
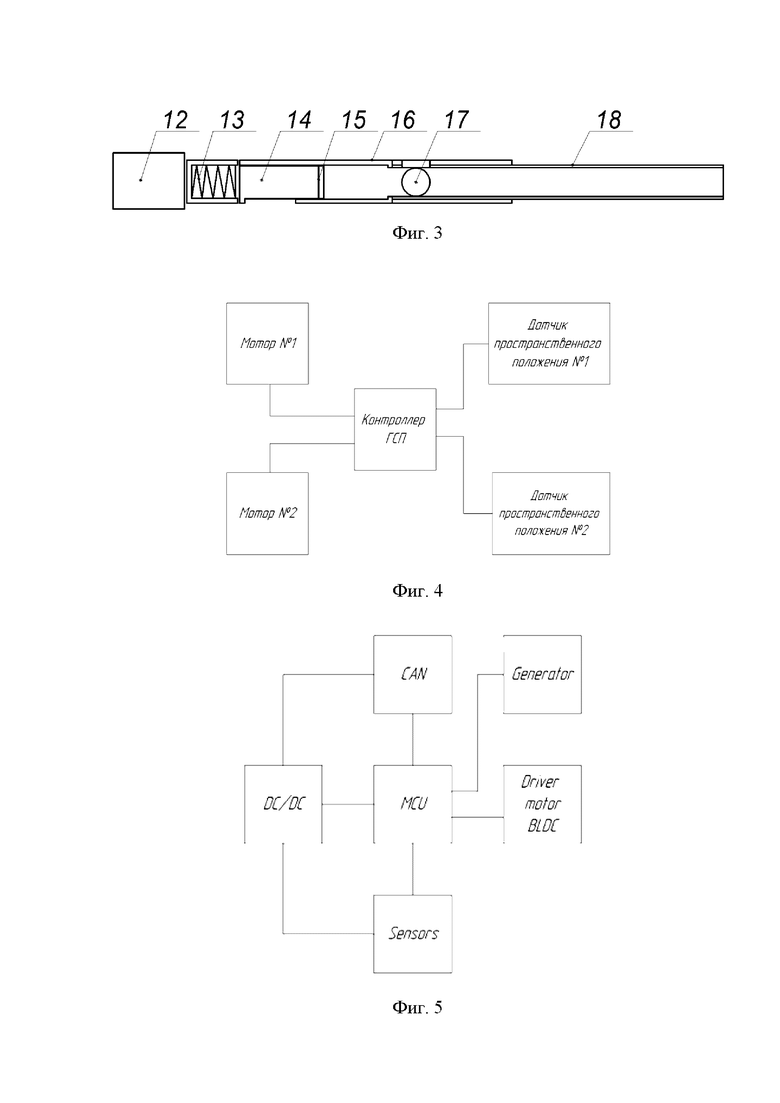
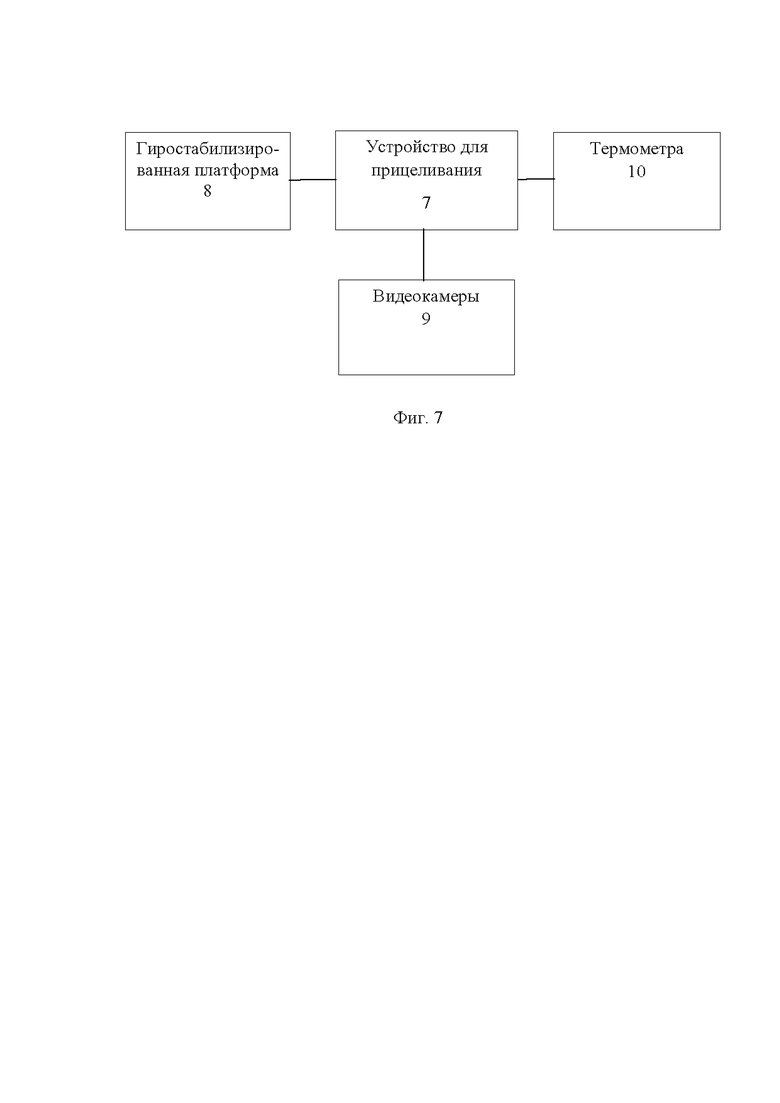
Конструкция беспилотной летающей платформы поясняется чертежами, где на фиг. 1 и 2 представлен внешний вид беспилотной летающей платформы с дополнительным устройством для тушения пожара; на фиг. 3 показана конструкция пневмомеханического устройства; на фиг. 4 представлена электрическая структурная схема устройства для прицеливания; на фиг. 5 приведена электрическая структурная схема разработанного контроллера управления и стабилизации пространственного положения полезной нагрузки; структурная схема блока управления представлена на фиг.6; Схема устройства для прицеливания представлена на фиг.7.
Осуществление изобретения
Сущность предложенного устройства заключается в следующем.
Основой беспилотной летательной платформы является силовая рама 1, снабженная двигателями 2, с закрепленными на валах их пропеллерами 3, при этом двигатели подключены к полетному контроллеру (на фигурах условно не показан), выполненному в виде микропроцессорной системы, снабженного программным обеспечением для информационно-управляющей поддержки жизненного цикла БПЛ. В нижней части силовой рамы 1 закреплена балка-держатель 4, на которой крепится резервуар для хранения и подачи капсул с огнетушащим веществом 5, тепловизор 6, устройство для прицеливания 7, состоящее из гиростабилизированной платформы 8, видеокамеры 9, и лазерного термометра 10. Дополнительно в нижней части балка-держатель 4 установлено пневмомеханическое устройство 11, которое состоит из следующих элементов (фиг. 3): электромеханический привод 12; пружина 13; поршень 14; манжета 15; корпус 16; капсула с огнетушащим веществом 17, ствол 18. Внутри декоративного корпуса 19 закреплен блок управления 20 (на фигурах условно не показан), выполненный на основе микроконтроллера, снабженный информационным входом 21, измерительным входом 22, первым и вторым силовыми выходами 23 и 24, а также Wi-Fi-адаптером беспроводной связи 25, и радиомодулем 26, при этом к информационному входу 21 подключено устройство для прицеливания 7, к измерительному входу 22 подключен тепловизор 6, первый силовой выход 23 подключен к пневмомеханическому устройству 11, оптически связанному с электромеханический привод 12, второй силовой выход 24, подключен к электродвигателю гиростабилизированной платформы 8, Wi-Fi-адаптер беспроводной связи 25, выполнен с возможностью удаленного подключения к полетному контроллеру, а радиомодуль 26, выполнен с возможностью приема команд от удаленной системы управления, выполненной в виде микропроцессорной системы.
Микроконтроллер 27 блока управления содержит микропроцессорное ядро 28, соединенное с помощью системной шины с FLASH-памятью программ 29, SRAM-памятью данных 30, многоканальным аналого-цифровым преобразователем ADC 31, USB-контроллером 32, универсальным асинхронным приемопередатчиком UART 33, Ethernet-контроллером 34, интерфейсом ввода/вывода общего назначения, сгруппированного, по крайней мере, в два GPI/O-порта ввода-вывода 35 и 36, и модулем подключения SD-карты 37.
К первой (P0[12]/AD06) линии аналого-цифрового преобразователя ADC 31 подключен измерительный вход 22, вторая линия (P0[13]/AD07) и последующие оставлены в качестве резерва, к USB-контроллеру 32 подключен информационный вход 21, универсальный асинхронный приемопередатчик UART 33 подключен к радиомодулю 26, к Ethernet-контроллеру 34 подключен Wi-Fi-адаптер 25, первые четыре линии (Р0[0]÷Р0[3]) первого GPI/O-порта ввода-вывода 35 подключены к первому силовому выходу 23, его вторые четыре линии (Р0[4]÷Р0[7]) подключены ко второму силовому выходу 24, к пяти первым линиям (Р1[0]÷Р1[5]) второго GPI/O-порта ввода-вывода 36 подключена линейка семисегментных индикаторов 38, к восьми последующим линиям (Р1[5]÷Р1[13]) второго GPI/O-порта ввода-вывода 36 подключена шестнадцатикнопочная клавиатура 39, а к модулю подключения SD-карты 37 может быть подключено устройство для чтения карт памяти (card reader), в которое установлена и электрически соединена с модулем SD-карта 40.
Беспилотную летательную платформу вертолётного типа с пневмомеханическим устройством для тушения пожаров применяют следующим образом.
К силовой раме 1, беспилотной летающей платформы дополнительно крепится резервуар для хранения и подачи капсул с огнетушащим веществом 17, тепловизор 6, устройство для прицеливания 7, пневмомеханическое устройство 11.
Резервуар для хранения и подачи капсул с огнетушащим веществом 5 выполнен из легких композитных материалов, что позволит снизить вес и увеличить коэффициент трения скольжения капсул с огнетушащим веществом в процессе подачи.
Капсула с огнетушащим веществом 17, для тушения пожара через люк 41, загружаются в резервуар для хранения и подачи капсул с огнетушащим веществом 15, откуда самотеком под действием силы тяжести она поступает в пневмомеханическое устройство 11, которое выстреливает капсулу с огнетушащим веществом 17, в очаг возгорания, направление выстрела задаётся с помощью устройства для прицеливания 7.
Капсула с огнетушащим веществом для тушения пожара состоит из корпуса, огнетушащего вещества (например бикарбонат натрия, бикарбонат калия или моноаммонийфосфат) и детонатора. Капсула при попадании в очаг возгорания разрывается за счёт срабатывания детонатора, который расположен в центре капсулы, что приводит к тушению пожара, за счёт распыления огнетушащего вещества и выдавливания кислорода из зоны горения. Огнетушащее вещество в капсулу загружается под высоким давлением, что позволяет увеличить зону распространения.
Для доставки капсул в зону горения используется оригинальное пневмомеханическое устройство 11, которое состоит из следующих элементов (фиг. 3): электромеханический привод 12; пружина 13; поршень14; манжета15; корпус 16; капсула с огнетушащим веществом 17; ствол 18.
Работа пневмомеханического устройства 11 осуществляется следующим образом: из резервуара для хранения и подачи капсула с огнетушащим веществом 5, под действием силы тяжести поступает в ствол 18, откуда выстреливается с помощью нагнетания воздуха. Нагнетание воздуха происходит за счёт натягивания пружины 13, с помощью электромеханического привода 12, после за счет отпускания этой пружины происходит высвобождение поршня 14 внутри корпуса 16 и движение вперед капсулы с огнетушащим веществом 17 в стволе 18.
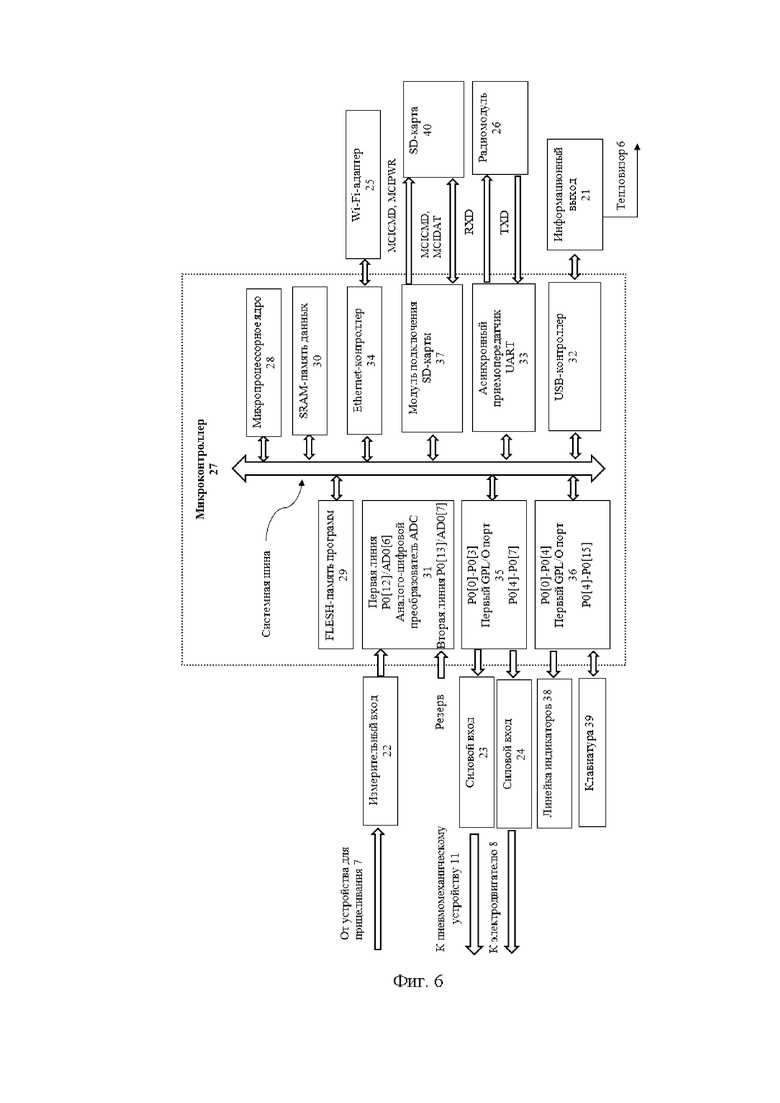
Устройство для прицеливания 7, включает в себя гиростабилизированной платформе 8, камеру 9, и лазерный термометр 10. Камера используется для визуального поиска источника пожара, а лазерный термометр для определения зон пожара и бесконтактного измерения температуры в них. Информация от камеры и лазерного термометра поступает на контролера, где происходит её анализ. Работа устройства осуществляется через контроллер управления и стабилизации пространственного положения полезной нагрузки, он определяет пространственное положение полезной нагрузки, относительно опорной системы координат и выполняет управление двигателем для стабилизации положения нагрузки. На фиг. 4 приведена электрическая структурная схема разработанного контроллера управления и стабилизации пространственного положения полезной нагрузки.
Видеокамера на гиростабилизированной платформе 8, представляет собой конструкцию из металлических рычагов, установленных на них бесколлекторных моторов, модуля видеокамеры с трансфокатором в защитном кожухе из композитного материала и датчиков положения.
Структурно в состав видеокамеры на гиростабилизированной платформе входят: видеокамера с трансфокатором, два бесколлекторных мотора, металлические рычаги, два датчика пространственного положения, защитный корпус из композитного материала (фиг.4).
При подключении полезной нагрузки такой как устройство для прицеливания 7, и пневмомеханического устройства 11, полетный контролер в автоматическом режиме распознает ее и передаёт оператору данных о типе подключенной полезной нагрузки. Посадка БПЛ осуществляется в ручном или автономном режиме на ножки 42.
Для автономной поддержки жизненного цикла БЛП в полетный контроллер загружается программное обеспечение, служащее для управления полетом БЛП в автоматическом, полуавтоматическом и ручном режимах управления. Данное программное обеспечение служит для:
- управления пространственной ориентацией;
- управления полетом в различных режимах, отличающихся логикой работы БЛП;
- формирования телеметрической информации, содержащей параметры движения, информацию о состоянии бортовых систем, статусах компонентов БЛП, напряжения силовой аккумуляторной батареи, тока потребления и ряда других параметров;
- идентификации отказов бортовых систем и обхода отказавших компонентов электронного оборудования БЛП;
- регистрации параметров полета БЛП;
- управления полезной нагрузкой, размещенной на борту БЛП;
- регистрации времени наработки и записи в энергонезависимую память полетного контроллера;
- идентификация источников пожара;
- определение зон пожара и бесконтактное измерения температуры в них.
Использование разработанной автономной системы информационно-управляющей поддержки жизненного цикла беспилотной летающей платформы позволит сократить время прибытия на место и эффективность ликвидации чрезвычайной ситуации на 43.2-51% в зависимости от погодных условий, чем у прототипа, за счет автономности и использования специальных капсул с огнетушащим веществом.
Беспилотную летающую платформу изготавливают, преимущественно, из не горючих легких композитных материалов (например, из углеродного волокна, имеющего низкий коэффициент теплового расширения, что позволит ему при тушении пожара выдерживать сильное тепловое воздействие, в отличие от других, изготовленных из пластмассы.). В качестве источника питания платформы целесообразно применение литий-ионного аккумуляторные батареи, что делает ее полностью автономной и не требует использования для ее электропитания дополнительного кабеля. Электропитание аккумуляторный батареи, не более 36 В, и она должна быть легко заменяемой.
Предлагаемое изобретение по сравнению с прототипом и другими известными техническими решениями имеет следующие преимущества:
- значительное снижение времени прибытия к месту пожара;
- повышение эффективности процесса тушения;
- снижение уровня энергетических и экономических затрат.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНАЯ ЛЕТАЮЩАЯ ПЛАТФОРМА ВЕРТОЛЕТНОГО ТИПА ДЛЯ ПОЖАРОТУШЕНИЯ | 2022 |
|
RU2781919C1 |
| ЛЕГКИЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТОЛЕТНОГО ТИПА ДЛЯ ТУШЕНИЯ ПОЖАРОВ В ВЫСОТНЫХ ЗДАНИЯХ | 2023 |
|
RU2807458C1 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ТУШЕНИЯ ПОЖАРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2826399C2 |
| МАЛОГАБАРИТНАЯ МОБИЛЬНАЯ РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ | 2018 |
|
RU2685319C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ТУШЕНИЯ ПОЖАРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2800045C1 |
| РОБОТИЗИРОВАННЫЙ, МОБИЛЬНЫЙ, МОДУЛЬНЫЙ ГОРНОСПАСАТЕЛЬНЫЙ КОМПЛЕКС И СПОСОБЫ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2682298C1 |
| Пожарный извещатель для наведения пожарного робота | 2016 |
|
RU2625715C1 |
| Многофункциональный робототехнический комплекс противопожарной защиты производственных объектов на базе роботизированной установки пожаротушения и мобильного роботизированного комплекса | 2023 |
|
RU2814057C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |

Изобретение относится к области пожарной техники, а именно к беспилотной летательной платформе, оборудованной для тушения пожаров, и может быть использовано для тушения различных пожаров как на открытой местности, так и в помещениях. Беспилотная летающая платформа вертолетного типа для пожаротушения содержит корпус, силовую раму, снабженную двигателями, с закрепленными на валах их пропеллерами, при этом двигатели подключены к полетному контроллеру, выполненному в виде микропроцессорной системы, снабженному программно-аппаратным регулятором оборотов лопастей, в нижней части силовой рамы закреплена балка-держатель, в корпусе закреплен блок управления, выполненный на основе микроконтроллера, снабженный информационным входом, измерительным входом, первым и вторым силовыми выходами, а также Wi-Fi-адаптером беспроводной связи и радиомодулем, к информационному входу подключена видеокамера, второй силовой выход подключен к электродвигателю гиростабилизированной платформы, Wi-Fi-адаптер беспроводной связи выполнен с возможностью удаленного подключения к полетному контроллеру, а радиомодуль выполнен с возможностью приема команд от удаленной системы управления, при этом платформа содержит лазерный термометр и тепловизор, подключенный к измерительному входу, при этом видеокамера, тепловизор, гиростабилизированная платформа и лазерный термометр составляют устройство для прицеливания, выполненное с возможностью ведения видеосъемки; на балке-держателе закреплен резервуар для хранения и подачи капсул с огнетушащим веществом, состоящих из корпуса капсулы, выполненного в виде шара, наполненного огнетушащим веществом; при этом первый силовой выход подключен к пневмомеханическому устройству, содержащему электромеханический привод, пружину, поршень, корпус пневмомеханического устройства и ствол для выстреливания капсул, резервуар выполнен с возможностью подачи капсул с огнетушащим веществом в ствол под действием силы тяжести, электромеханический привод выполнен с возможностью натягивания пружины для нагнетания воздуха и с возможностью отпускания пружины с высвобождением поршня внутри корпуса пневмомеханического устройства для движения капсулы с огнетушащим веществом в стволе. 7 ил.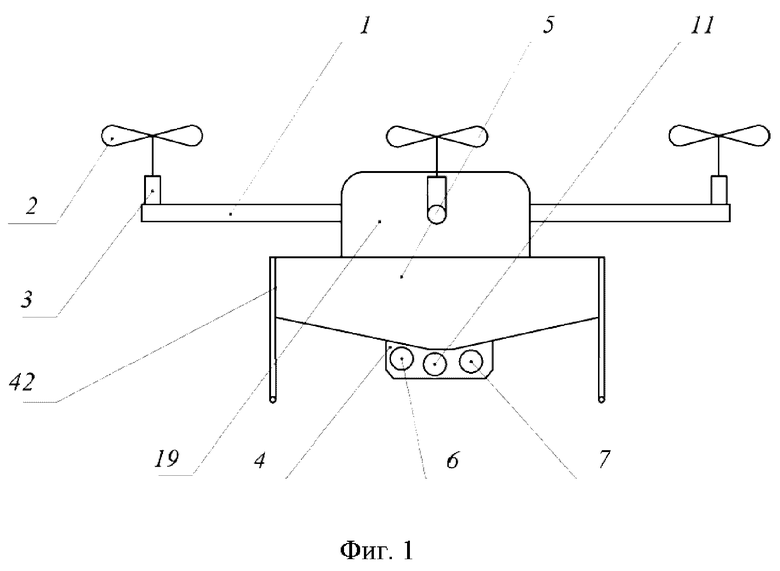
Беспилотная летающая платформа вертолетного типа для пожаротушения, содержащая корпус, силовую раму, снабженную двигателями, с закрепленными на валах их пропеллерами, при этом двигатели подключены к полетному контроллеру, выполненному в виде микропроцессорной системы, снабженному программно-аппаратным регулятором оборотов лопастей, в нижней части силовой рамы закреплена балка-держатель, в корпусе закреплен блок управления, выполненный на основе микроконтроллера, снабженный информационным входом, измерительным входом, первым и вторым силовыми выходами, а также Wi-Fi-адаптером беспроводной связи и радиомодулем, к информационному входу подключена видеокамера, второй силовой выход подключен к электродвигателю гиростабилизированной платформы, Wi-Fi-адаптер беспроводной связи выполнен с возможностью удаленного подключения к полетному контроллеру, а радиомодуль выполнен с возможностью приема команд от удаленной системы управления, отличающаяся тем, что содержит лазерный термометр и тепловизор, подключенный к измерительному входу, при этом видеокамера, тепловизор, гиростабилизированная платформа и лазерный термометр составляют устройство для прицеливания, выполненное с возможностью ведения видеосъемки; на балке-держателе закреплен резервуар для хранения и подачи капсул с огнетушащим веществом, состоящих из корпуса капсулы, выполненного в виде шара, наполненного огнетушащим веществом; при этом первый силовой выход подключен к пневмомеханическому устройству, содержащему электромеханический привод, пружину, поршень, корпус пневмомеханического устройства и ствол для выстреливания капсул, резервуар выполнен с возможностью подачи капсул с огнетушащим веществом в ствол под действием силы тяжести, электромеханический привод выполнен с возможностью натягивания пружины для нагнетания воздуха и с возможностью отпускания пружины с высвобождением поршня внутри корпуса пневмомеханического устройства для движения капсулы с огнетушащим веществом в стволе.
| РОБОТИЗИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ МОНИТОРИНГА ТЕРРИТОРИЙ ПОЖАРОВ, ТЕРРОРИСТИЧЕСКИХ АКТОВ И ТЕХНОГЕННЫХ КАТАСТРОФ | 2014 |
|
RU2557857C1 |
| CN 115367116 A, 22.11.2022 | |||
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВКЛЮЧЕНИЯ | 0 |
|
SU172887A1 |
| US 20130134254 A1, 30.05.2013 | |||
| CN 105327477 A, 17.02.2016. | |||

