Настоящее изобретение относится к электронным схемам. В частности, изобретение касается нового и улучшенного способа и устройства для компенсации погрешности частоты гетеродина посредством контроля условий эксплуатации.
Источники стабильной частоты играют важнейшую роль в функционировании огромного количества электронных систем и устройств. Источники частоты используются в электронных устройствах в качестве источников временного согласования, а также в качестве гетеродинов (Г) для настройки электронных устройств на требуемые каналы связи.
В настоящее время известно множество типов источников стабильной частоты. Использование определенного типа источника частоты, реализуемого в конкретной прикладной системе, определяется в соответствии с проектными ограничениями на конкретную прикладную систему. Атомные часы отличаются исключительно высокой стабильностью частоты, однако их размеры, стоимость и невозможность настройки существенно ограничивают их реальное применение в электронной системе. Аналогично можно спроектировать источники стабильной частоты, в которых используется пьезоэлектрический эффект в кристаллах кварца. Благодаря малым размерам и относительно высокой стабильности источников частоты на основе кварцевых кристаллов они получили широкое распространение во многих электронных устройствах, рассчитанных на широкого потребителя.
Тип источника и требуемая погрешность частоты определяется конкретным применением. Для приемника, используемого в системе глобального позиционирования (СГП), необходим Г с высоким уровнем стабильности частоты, чтобы иметь возможность быстро устанавливать и поддерживать синхронизацию с сигналами, обеспечиваемыми на несущих частотах СГП, которые передаются от спутников. Общее представление о СГП помогает понять требования к стабильности частоты гетеродина в приемнике СГП.
Обычно СГП используют для определения местоположения. Система СГП определяет местоположение, используя геометрические принципы. На орбитах вокруг земли вращается группа спутников СГП. Приемник может определить свое точное положение, получая информацию о положениях спутников и вычисляя расстояние от приемника до каждого из нескольких спутников.
Приемник СГП вычисляет расстояние от спутника до приемника путем определения времени, которое необходимо сигналу, передаваемому спутником, для достижения приемника. Как только приемник определит расстояние от спутника, он узнает, что находится в геометрическом месте точек, равноудаленных от спутника. Спутник представляет собой точечный источник, а геометрическим местом точек, равноудаленных от одной точки, является сферическая поверхность. Определив расстояние до второго спутника, приемник узнает, что он находится в некотором месте на второй сферической поверхности. Однако в том случае, когда известно расстояние до двух спутников, возможное количество положений приемника существенно сокращается. Это происходит потому, что приемник находится в некотором месте на пересечении двух сферических поверхностей. Пересечением двух сферических поверхностей является окружность. Таким образом, приемник получает информацию о том, что он находится на окружности, являющейся пересечением двух сферических поверхностей. Определив расстояние от приемника до третьего спутника, можно построить третью сферическую поверхность. Третья сферическая поверхность пересекает первые две поверхности, а также пересекает окружность, которая определяет пересечение первой и второй сферических поверхностей. Пересечение трех сферических поверхностей дает две разные точки, в которых может находиться приемник. Как только будут определены две точки, образуемые пересечением трех сферических поверхностей, приемник сможет оценить, какая из двух точек соответствует его правильному положению, либо сможет определить, на каком расстоянии от четвертого спутника он находится.
Приемник сможет оценить, какая из двух точек соответствует его правильному положению, как только будут определены расстояния от него до трех спутников. Определить правильную точку можно исходя из того, что одна из двух точек не может рассматриваться как вероятное положение приемника. Вероятно, что правильной из двух указанных точек будет точка, находящаяся недалеко от поверхности Земли, в то время как вторая точка, находящаяся очень высоко над поверхностью Земли либо глубоко под поверхностью Земли, скорее всего соответствует ложному положению. Точное положение приемника будет известно, если определить его расстояние от четвертого спутника. Информацию о точном положении можно получить, используя четыре спутника, поскольку четыре сферические поверхности пересекаются только в одной точке.
Главной проблемой при реализации СГП является точное определение расстояния от спутника до приемника. Расстояние от спутника до приемника вычисляют посредством измерения времени прибытия сигнала, переданного со путника на приемник. Каждый спутник передает две несущие частоты, причем каждая из них модулирована уникальным псевдослучайным кодом. Одна из несущих имеет частоту 1575,42 мГц, а другая несущая имеет частоту 1227,60 мГц. Приемник демодулирует полученный сигнал, выделяя псевдослучайный код. Локально формируемый псевдослучайный код синхронизируется по демодулированному псевдослучайному коду. Задержка между двумя псевдослучайными кодами представляет собой время прибытия переданного сигнала. Затем может быть определено расстояние до спутника путем умножения времени прибытия на скорость света.
Все передающие спутники синхронизированы во времени. Однако мобильный приемник весьма слабо синхронизирован со спутниками. Слабая временная синхронизация приемника со спутниками порождает ошибки при определении местоположения. Как было установлено выше, точное время прибытия соответствует точному расстоянию. Геометрическим местом точек, равноудаленных от одной точки, является сферическая поверхность с радиусом, равным указанному расстоянию. Однако, если известно лишь то, что время прибытия лежит в некотором диапазоне значений времени, а именно измеренное время плюс или минус некоторая ошибка, то тогда может быть известно только то, что искомое расстояние лежит в соответствующем диапазоне значений. В том случае, когда известно лишь то, что искомое расстояние лежит в некотором диапазоне значений, геометрическим местом точек, равноудаленных от источника, является сферическая оболочка. Толщина этой сферической оболочки равна ошибке в измерении расстояния. Пересечение трех сферических оболочек, каждая из которых соответствует оценке положения на основе дополнительного спутника, дает два тела, одно из которых представляет положение приемника. Напомним, что в случае дискретных расстояний пересечение трех сферических поверхностей дает две точки, а не два тела.
Проблема временной синхронизации частично разрешается путем дополнительного измерения расстояния до четвертого спутника. Сначала полагают, что значение временной ошибки равно нулю. Затем определяют расстояния до трех спутников. Как было пояснено выше, в результате пересечения трех сферических поверхностей, определенных этими тремя измерениями расстояний, получаются две отдельные точки, одна из которых и соответствует положению приемника. Расстояние до четвертого спутника определяет четвертую сферическую поверхность. В идеале, в случае отсутствия временной ошибки четвертая сферическая поверхность пересекается с тремя другими сферическими поверхностями только в одной точке. Однако при наличии временной ошибки четыре сферические поверхности не пересекаются. Между спутниками нет временной ошибки. Следовательно, временная ошибка от приемника для одного спутника будет такой же, как временная ошибка от приемника для любого из спутников в группе. Временная ошибка может быть определена методом подбора значения предполагаемой временной ошибки. Временная ошибка определяется, когда четыре сферических поверхности пересекаются в одной точке.
Анализ временной ошибки является лишь одной из проблем, с которой сталкиваются при определении положения с использованием системы СГП. Приемник СГП для определения положения должен быть реализован в виде устройства, имеющего небольшие физические размеры и относительно низкую стоимость. Ограничения на размеры и стоимость становятся особенно важными, когда приемник СГП реализуется в устройстве, ориентированном на массового потребителя. Современные требования, предъявляемые к беспроводным телефонам, включают возможность определения местоположения вызывающего абонента. Конкретное местоположение беспроводного телефона важно знать в случае экстренного вызова, к примеру вызова по номеру 911 в США. Кроме того, несмотря на физические конструктивные ограничения приемник должен осуществлять быстрый поиск и обнаружение спутниковых сигналов.
Конструкция приемника должна представлять собой компромисс между стоимостью, чувствительностью приема сигнала и временем поиска. В конструкции приемника невозможно обеспечить одновременно максимальное значение всех параметров. Значительное повышение чувствительности приемника или уменьшение времени поиска приводит к возрастанию стоимости приемника.
Главным фактором, увеличивающим сложность реализации процесса поиска и обнаружения спутникового сигнала, является погрешность частоты, свойственная гетеродину (Г) приемника. Г используется в приемнике для преобразования принимаемого сигнала в немодулированный сигнал (видеосигнал) с понижением частоты. Затем немодулированный сигнал обрабатывается. В случае когда сигнал принимается от спутника СГП, немодулированный сигнал соотносится со всеми возможными псевдослучайными кодами, чтобы определить, какой спутник породил этот сигнал, а также определить время прибытия сигнала. Процесс поиска и обнаружения сигнала сильно усложняется из-за погрешности частоты Г. Погрешность частоты, вносимая Г, создает дополнительную область, которая должна быть обработана в процессе поиска. Кроме того, погрешность частоты Г представляет отдельную величину, для которой необходимо определять время прибытия. Таким образом, область поиска увеличивается пропорционально погрешности частоты, поскольку определение времени прибытия должно производиться для всех возможных погрешностей частоты.
На действительную или воспринимаемую погрешность частоты Г оказывает влияние множество параметров. На частоту Г влияет рабочая температура схемы, а также градиент температуры в схемной плате. Вдобавок на стабильность частоты Г непосредственно влияет стабильность источника опорной частоты, используемого для Г. Дополнительным фактором, определяющим погрешность частоты, является доплеровский сдвиг, определяемый скоростью приемника. Даже в случае когда Г приемника функционирует абсолютно стабильно, возможно появление воспринимаемой погрешности частоты из-за доплеровского сдвига. Этот сдвиг может вызвать либо видимое увеличение, либо видимое уменьшение частоты спутниковой передачи. Хотя как спутник, так и Г приемника могут работать абсолютно стабильно, сигнал в приемнике может иметь сдвиг по частоте. Доплеровский сдвиг, вносимый из-за перемещения приемника, не корректируется в приемнике, а только вносит дополнительную погрешность в погрешность частоты, уже существующую в приемнике.
Таким образом, имеется потребность в способе, позволяющем уменьшить погрешность частоты Г для сокращения области поиска, которая должна быть обследована в процессе обработки немодулированного сигнала. Уменьшение области поиска позволяет упростить поиск, что, в свою очередь, дает возможность повысить чувствительность приемника и уменьшить время поиска и обнаружения сигнала.
Настоящее изобретение представляет собой новый и улучшенный способ и устройство для уменьшения погрешности частоты гетеродина (Г) путем определения параметров функционирования усилителя мощности УМ на радиочастоте (РЧ), когда он находится в первом режиме. Во втором режиме функционирование усилителя УМ РЧ в точности повторяется для достижения стабильных условий эксплуатации для Г.
При работе в первом режиме приемник обеспечивается внешним источником частоты, имеющим малую погрешность частоты. Приемник использует вешний источник частоты в качестве генератора опорной частоты. Приемник оценивает погрешность частоты Г, используя в качестве генератора опорной частоты внешний источник частоты. Одновременно с оценкой частоты приемник контролирует различные заранее установленные параметры, о которых известно, что они влияют на точность и стабильность частоты Г. Примерами параметров, от которых зависит точность Г, являются рабочая температура и градиенты температуры. Главным фактором, определяющим общую температуру электронного устройства, такого как беспроводный телефон, является усилитель мощности по радиочастоте (УМ РЧ). Усилитель УМ РЧ является также главным фактором, определяющим градиенты температуры в электронном устройстве. Однако усилитель УМ РЧ находится в работе непостоянно. Следовательно, одним из контролируемых параметров является активность усилителя УМ РЧ. Активность усилителя УМ РЧ в течение заранее определенного временного интервала может быть использована для вычисления эффективного рабочего цикла УМ. Значения контролируемых параметров, в том числе эффективный рабочий цикл и частота Г, запоминаются в ячейках памяти. В альтернативном варианте погрешность частоты может запоминаться в таблице. В результате обеспечивается ряд таблиц с данными, которые характеризуют Г.
Г может быть переключен во второй режим, в котором контролируется частота на выходе Г для обеспечения более низкой погрешности частоты. Во втором режиме приемник больше не использует внешний источник частоты. Компенсация Г выполняется для коррекции расчетной ошибки на основе ранее полученных параметров. Для минимизации градиента температуры в электронном устройстве при его работе во втором режиме контролируется активность усилителя УМ РЧ. Усилитель УМ РЧ во втором режиме может непрерывно находиться в активном состоянии либо может работать с эффективным рабочим циклом, который вычисляется и запоминается, когда электронное устройство работает в первом режиме.
Признаки, задачи и преимущества настоящего изобретения станут более очевидными из последующего подробного описания вместе с сопроводительными чертежами, на которых одинаковые ссылочные позиции определяют соответствующие элементы на всех чертежах и где:
фиг.1 - блок-схема приемника;
фиг.2 - блок-схема гетеродина;
фиг.3 - диаграмма, иллюстрирующая область поиска;
фиг.4 - блок-схема приемника, в котором реализуется процесс определения параметров Г;
фиг.5 - блок-схема альтернативного варианта приемника, в котором реализуется процесс определения параметров Г и активности УМ;
фигуры 6А-6В - блок-схемы процесса определения параметров Г; и
фиг.7 - блок-схема процесса компенсации Г.
Подробное описание предпочтительных вариантов осуществления изобретения
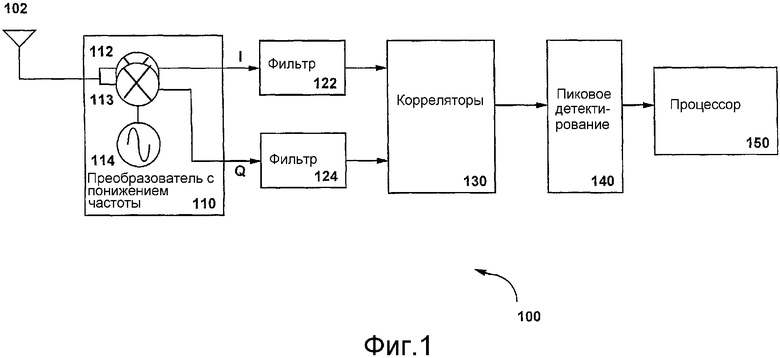
На фиг.1 представлена блок-схема типового приемника 100. Антенна 102 служит в качестве интерфейса между сигналами вещания и приемником 100. Антенна 102 настраивается на оптимальный прием сигналов, передаваемых в L-диапазоне, причем приемник 100 сконфигурирован как приемник СГП. В случае использования приемника СГП источником сигналов вещания является группа спутников СГП, вращающихся на околоземных орбитах. Сигналы, принимаемые антенной 102, подаются в преобразователь 110 с понижением частоты. Преобразователь 110 с понижением частоты служит для преобразования РЧ сигналов, принимаемых антенной 102, с понижением частоты в немодулированные сигналы, которые подвергаются дальнейшей обработке. Основными компонентами преобразователя 110 с понижением частоты являются смесители 112 и гетеродин 114. Преобразователь 110 с понижением частоты может также включать фильтры и усилители (не показаны) для обеспечения максимального качества результирующего немодулированного сигнала. Принимаемый сигнал подается от антенны 102 в смеситель 112 внутри преобразователя 110 с понижением частоты. Для упрощения блок-схемы до ее функциональных компонентов фильтрация и усиление сигнала в преобразователе 110 с понижением частоты не показаны. Смеситель 112 предназначен для эффективного умножения принимаемого сигнала на сигнал Г 114. Результирующий сигнал, выдаваемый смесителем 112, имеет две основные частоты. Одна частотная составляющая выходного сигнала смесителя 112 имеет значение суммы центральной частоты принимаемого сигнала и рабочей частоты Г 114. Вторая частотная составляющая выходного сигнала смесителя 112 имеет значение разности между центральной частотой принимаемого сигнала и рабочей частотой Г 114. Два смесителя 112-113 используются в преобразователе 110 с понижением частоты в том случае, когда принимаемый сигнал подвергается квадратурной модуляции. Принимаемый сигнал используется в качестве входного сигнала для обоих смесителей 112-113. Вторым входным сигналом в первом смесителе 112 является сигнал Г 110. Вторым выходным сигналом во втором смесителе 113 является сигнал Г 114, смещенный на 90° в фазовращателе (не показан). Результирующий выходной сигнал первого смесителя 112 обозначен как инцидентный выходной сигнал (I), а результирующий выходной сигнал второго смесителя 113 обозначен как квадратурный выходной сигнал (Q).
Выходные сигналы I и Q из преобразователя 110 с понижением частоты подаются в соответствующие фильтры 122 и 124, которые используют для удаления нежелательной частотной составляющей из смесителей 112-113 и предварительного согласования параметров сигнала, преобразованного с понижением частоты, перед последующей обработкой сигнала.
Отфильтрованные сигналы I и Q подаются в группу корреляторов 130. Корреляторы 130 используют способы цифровой обработки сигналов для обработки сигналов I и Q. Корреляторы оцифровывают сигналы I и Q в аналого-цифровых преобразователях (АЦП), чтобы иметь возможность использовать цифровую обработку сигналов. Корреляторы 130 используются для определения фазового сдвига сигналов, принимаемых со спутников, когда приемник 100 сконфигурирован для определения положения с использованием СГП. Приемник 100, когда его включают первый раз, не имеет информации о своем положении. Приемник 100 определяет свое начальное положение путем поиска по всем возможным псевдослучайным кодовым последовательностям, передаваемым каждым спутником. Вдобавок приемник 100 должен осуществлять поиск по всем возможным фазам всех возможных псевдослучайных кодов. Для минимизации времени поиска, необходимого приемнику 100, поиск выполняют несколько корреляторов, работающих параллельно. Каждый коррелятор работает с одной псевдослучайной последовательностью. Коррелятор пытается определить фазовый сдвиг псевдослучайного кода, созданного внутри приемника, по отношению к коду, принимаемому от спутника. Псевдослучайные коды, которые не соответствуют сигналу спутника, не коррелируются из-за случайной природы этих кодов. Вдобавок правильный псевдослучайный код не будет коррелироваться с принимаемым сигналом, пока не будут выровнены фазы этих двух кодовых сигналов. Таким образом, корреляторы 130 обеспечивают индикацию корреляции в корреляторе, имеющем тот же псевдослучайный код, что и принимаемый сигнал, только тогда, когда выровнены фазы этих двух сигналов.
Результирующие сигналы корреляторов подаются в процессор 140 пикового детектирования. Множество корреляторов работают параллельно и одновременно выдают результаты в процессор 140 пикового детектирования. Процессор 140 пикового детектирования определяет наиболее вероятные псевдослучайные коды и фазовые сдвиги для полученного сигнала.
В СГП ортогональные коды используются для каждого из спутников. Это позволяет всем спутникам одновременно вести передачу на одной и той же частоте. Таким образом, в приемнике одновременно представлена информация от множества источников. Множество корреляторов 130 работают независимо друг от друга и могут определить фазу принятого псевдослучайного кода в присутствии других ортогональных кодов. Таким образом, процессор 140 пикового детектирования одновременно обеспечивается коэффициентами корреляции, идентифицирующими количество псевдослучайных кодов и фазовый сдвиг для этих кодов. Поскольку каждому спутнику выделен один псевдослучайный код, идентификация псевдослучайного кода определяет конкретный спутник в качестве источника этого кода. Вдобавок фазовый сдвиг кода определяет время прибытия данного сигнала. Процессор 150 анализирует информацию в процессоре 140 пикового детектирования для вычисления положения приемника 100. Одновременное определение псевдослучайного кода и фазовых сдвигов кодов позволяет процессору 150 оценить положение приемника по мере обновления данных в процессоре 140 пикового детектирования.
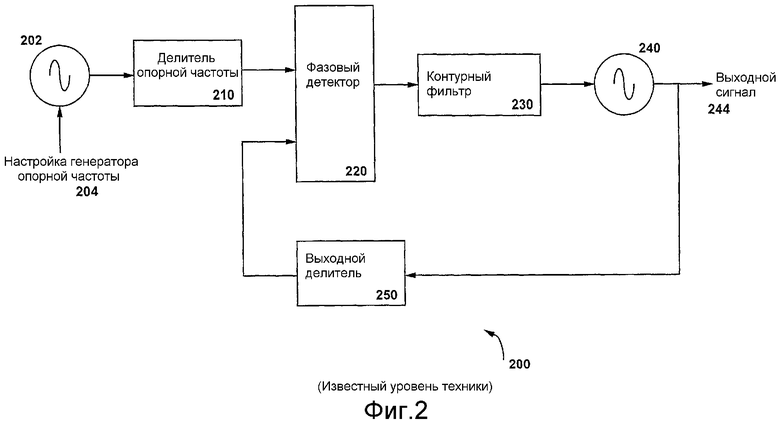
Однако процесс поиска усложняется, если частота Г 114 в преобразователе 110 с понижением частоты является нестабильной. На фиг.2 показана блок-схема типового перестраиваемого Г 200 с системой с фазовой автоподстройки частоты (ФАПЧ-система). В качестве источника опорной частоты для ФАПЧ-системы используется генератор 202 опорной частоты. Генератор 202 опорной частоты может представлять собой генератор с фиксированной частотой либо генератор, управляемый напряжением (ГУН) с небольшим диапазоном настройки. В беспроводном телефоне в качестве генератора 202 опорной частоты может быть использован управляемый напряжением кварцевый генератор с температурной компенсацией (КГУНТК). Там, где в качестве генератора 202 опорной частоты используется ГУН, предусмотрена управляющая шина 204 для настройки опорной частоты.
Выходной сигнал генератора 202 опорной частоты подается на делитель 210 опорной частоты. Делитель 210 опорной частоты используется для уменьшения частоты генератора 202 опорной частоты. Это важно, поскольку выходная частота ФАПЧ-системы пропорциональна частоте, поступающей на вход фазового детектора 220. Выходной сигнал делителя 210 опорной частоты подается в качестве одного из входных сигналов в фазовый детектор 220.
ГУН 240 создает выходной сигнал 244 ФАПЧ-системы. ГУН должен обладать возможностью настройки в требуемом диапазоне частот ФАПЧ-системы. Напряжение, подаваемое на шину управления ГУН, определяет рабочую частоту. Выходной сигнал 244 ФАПЧ-системы может быть использован в качестве входного сигнала для смесителей в преобразователе с понижением частоты. Выходной сигнал 244 ФАПЧ-системы подается также на вход выходного делителя 250. Выходной делитель 250 масштабирует частоту выходного сигнала 244 ФАПЧ-системы таким образом, что частота, подаваемая на вход фазового детектора 220 (масштабированный выходной сигнал генератора 202 опорной частоты), будучи умноженная на масштабный коэффициент выходного делителя 250, дает требуемую выходную частоту. Выходной сигнал делителя 250 подается в качестве второго входного сигнала в фазовый детектор 220.
Фазовый детектор 220 сравнивает выходной сигнал делителя 210 опорной частоты с выходным сигналом выходного делителя 250 и в качестве выходного сигнала формирует сигнал ошибки. Сигнал ошибки, выдаваемый фазовым детектором 220, подается в контурный фильтр 230. Полоса пропускания контурного фильтра 230 ограничивает сигнал ошибки от фазового детектора 220. Выходной сигнал контурного фильтра 230 используется в качестве управляющего напряжения в ГУН 240. Таким образом, можно видеть, что точность частоты выходного сигнала 244 ФАПЧ-системы определяется точностью поддержания частоты генератора 202 опорной частоты.
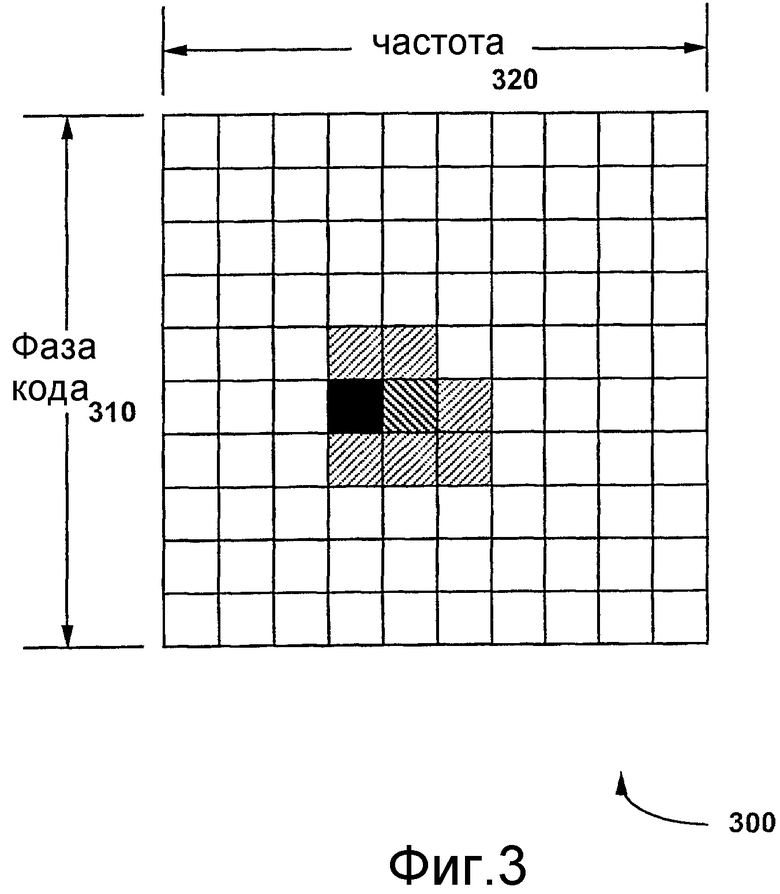
Погрешности частоты Г усложняют процесс поиска. Полная область 300 поиска, которую должен покрыть каждый коррелятор, показана на фиг.3. Каждый коррелятор в приемнике СГП должен вести поиск по всем возможным значениям фазы кода. Область 310 поиска фазы кода показана в виде вертикальной области поиска на фиг.3. Каждый элемент области 310 поиска фазы кода представляет собой минимальную различимую разность фаз. Короткий псевдослучайный код, используемый в системе СГП, имеет длину 1023 бита. Область 310 поиска фазы кода должна покрывать все возможные фазы кода, если псевдослучайный характер кода дает незначительную корреляцию для всех фазовых сдвигов кода, больших нуля. Следовательно, для однозначной идентификации фазы псевдослучайного кода потребуется по меньшей мере 1023 бита в области 310 поиска фазы кода.
Из фиг.3 можно видеть, что увеличение области 320 поиска частоты приводит к пропорциональному увеличению всей области 300 поиска. Область 320 поиска частоты представляет дополнительную координату поиска, поскольку погрешность частоты и погрешность фазы кода являются взаимно независимыми. Каждый элемент дискретизации в области 320 поиска частоты представляет минимальный различимый интервал изменения частоты. Длина минимального различимого интервала изменения частоты зависит от количества отсчетов и общего времени интегрирования. Минимальный различимый интервал частоты уменьшается при увеличении общего времени интегрирования. Кроме того, для достижения требуемого различимого интервала частоты необходимо достаточное количество отсчетов. Увеличение дрейфа Г приводит к увеличению области 320 поиска частоты.
Приемник сопоставляет отсчеты в каждом элементе дискретизации, заданном в полной области 300 поиска. Для дальнейшего повышения отношения сигнал-шум (ОСШ) принимаемого сигнала осуществляется накопление последовательных результатов. Дрейф Г приводит к тому, что в накопленных результатах появляется ряд элементов дискретизации, соответствующих дрейфу частоты. Такое "размывание" сигнала показано на фиг.3 несколькими заштрихованными элементами дискретизации частоты. Накопленные результаты для Г, у которого нет дрейфа частоты, попадают в один единственный элемент дискретизации частоты. Это значительно улучшает идентификацию сигнала в результате увеличения значения ОСШ.
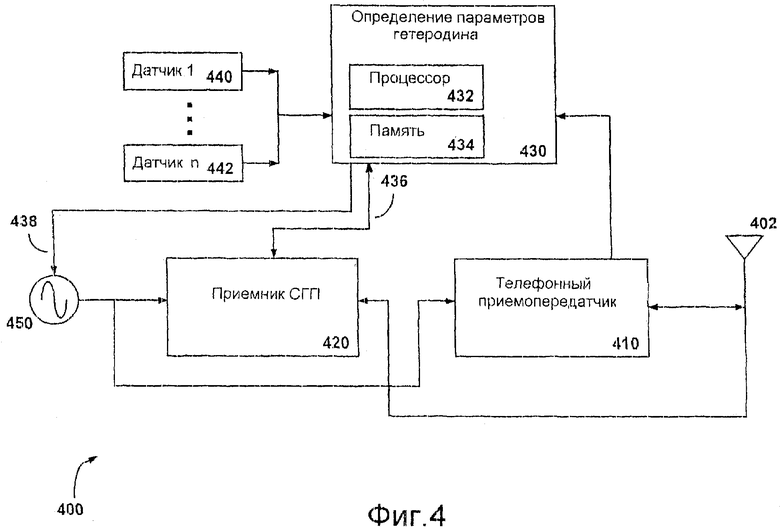
На фиг.4 показана блок-схема системы стабилизации Г в беспроводном телефоне 400, имеющем функции СГП. Беспроводный телефон 400 включает в себя телефонный приемопередатчик 410, позволяющий осуществлять связь через систему беспроводной телефонной связи. Беспроводный телефон 400 также содержит приемник 420 СГП, помогающий в определении местоположения. В варианте, показанном на фиг.4, беспроводный телефон 400 работает либо в режиме телефонной связи, либо в режиме СГП, причем эти два режима не могут существовать одновременно. Однако беспроводный телефон 400 может работать одновременно в режиме телефонной связи и в режиме СГП, если в нем имеются достаточные возможности для обработки сигналов.
Радиочастотные (РЧ) сигналы принимаются и передаются беспроводным телефоном с использованием антенны 402. РЧ-сигналы, проходящие через антенну 402, включают сигналы передачи и приема телефонного приемопередатчика 410, а также приемные сигналы для приемника 420 СГП. В варианте, показанном на фиг.4, приемник 420 СГП и телефонный приемопередатчик 410 совместно используют общий Г 450. Как обсуждалось выше, неточность работы Г 450 приводит к увеличению области поиска для 420 приемника СГП. Таким образом, в варианте, показанном на фиг.4, для определения параметров Г 450 используется информация, принимаемая телефонным приемопередатчиком 410 таким образом, что, когда приемник 420 СГП осуществляет поиск, погрешность частоты Г 450 минимизируется.
Для определения параметров внутреннего Г 450 беспроводный телефон 400 обеспечивается внешним сигналом, имеющим высокостабильную частоту. В беспроводной системе, такой как система с многостанционным доступом и кодовым разделением каналов (МДКР), специфицированной в стандарте 95-B MOBILE STATION-BASE STATION COMPATIBILITY STANDARD FOR DUAL-MODE SPREAD SPECTRUM SYSTEMS Ассоциации промышленности средств связи (TIA) / Ассоциации электронной промышленности (EIA), базовые станции непрерывно транслируют сигналы. Сигналы, непрерывно транслируемые базовыми станциями, включают канал пилот-сигнала и канал синхронизации. Оба этих сигнала отличаются высокой стабильностью частоты, и любой из них можно использовать в качестве внешнего опорного сигнала, необходимого для определения параметров Г 450.
Беспроводный телефон 400, спроектированный для работы в системе МДКР типа той, что определена стандартом TIA/EIA 95-B, включает поисковое устройство в приемнике для непрерывного поиска пилот-сигналов. В беспроводном телефоне 400 приемник, входящий в состав телефонного приемопередатчика 410, принимает пилот-сигнал, передаваемый базовой станцией (не показана).
Беспроводный телефон 400 способен использовать преимущества наличия пилот-сигнала для более эффективного обнаружения сигнала в режиме СГП. Приемник использует пилот-сигнал стабильной частоты в качестве внешней опорной частоты для определения погрешности частоты в Г 450. Погрешность частоты, определенная приемником, подается в схему 430 определения параметров гетеродина. Вдобавок по всему беспроводному телефону 400 распределены датчики 440-442 для контроля факторов, которые влияют на погрешность частоты Г 450. Датчики 440-442 могут контролировать такие факторы, но не только, как температура, градиенты температуры, работу усилителя мощности УМ РЧ, рабочий цикл УМ РЧ, напряжение батареи, накопленную во времени энергию, влажность либо любую другую переменную, определенную в качестве фактора, влияющего на погрешность частоты Г 450. Датчик 440 подает сигнал в схему 430 определения параметров гетеродина. Несколько оцифрованных значений, соответствующих показаниям датчика 440, усредняется, и полученное среднее значение запоминается в массиве в памяти 434. Если датчик 440 выдает аналоговое значение, схема 430 определения параметров гетеродина оцифровывает показания до усреднения и запоминания среднего значения в памяти 434. Если датчик 440 выдает цифровое значение, то тогда нет необходимости, чтобы схема 430 определения параметров гетеродина выполняла дополнительное согласование сигнала, и схема 430 просто запоминает усредненное показание цифрового датчика 440. Процессор 432, который образует часть схемы 430 определения параметров гетеродина, выполняет функцию усреднения.
Схема 430 определения параметров гетеродина также усредняет несколько значений погрешности частоты, определенных и переданных телефонным приемопередатчиком 410. Усредненное значение погрешности частоты также запоминается в массиве памяти 434. Усредненная погрешность частоты запоминается в ячейке памяти 434, связанной с соответствующими усредненными показаниями датчиков 440-442. Таким образом, в каталог заносится текущее состояние условий эксплуатации вместе с соответствующей погрешностью частоты Г 450. Схема 430 определения параметров гетеродина продолжает накапливать новые показания датчика 440 и соответствующую погрешность частоты, пока беспроводный телефон 400 работает в режиме телефонной связи. Когда беспроводный телефон 400 работает в режиме СГП, схема 430 определения параметров гетеродина использует информацию о сохраненном показании датчика 440 и погрешности частоты, помогая приемнику 420 СГП обнаружить сигнал.
Чтобы помочь приемнику обнаружить сигнал СГП, схема 430 определения параметров гетеродина считывает значения от каждого из датчиков 440-442. Затем процессор 432 сравнивает текущие значения от датчиков 440-442 с массивом значений, запомненных ранее. Вероятная погрешность частоты Г 450 определяется как ранее запомненное значение, соответствующее показаниям датчиков 440-442. Если в массиве отсутствуют точные показания датчиков 440-442, то процессор 432 интерполирует существующие значения или выполняет экстраполяцию на их основе. Тем самым, схема 430 определения параметров гетеродина определяет вероятную погрешность частоты Г 450. Затем схема 430 определения параметров гетеродина формирует сигнал ошибки, который подается в шину 438 управления Г для компенсации погрешности частоты. В одном варианте сигнал ошибки преобразуется из цифрового значения в аналоговое, которое подается в Г, с использованием в качестве цифроаналогового преобразователя дельта-сигма модулятора с избыточной дискретизацией и большим динамическим диапазоном. Схема 430 определения параметров гетеродина в альтернативном варианте может посылать значение погрешности частоты в приемник 420 СГП по информационной шине 436. Наличие информации о погрешности частоты позволяет приемнику 420 СГП сузить область поиска и обнаружить сигнал при меньшем количестве вычислений. В альтернативном варианте схема 430 определения параметров гетеродина обеспечивает комбинированную коррекцию, имеющую две составляющие. Схема 430 определения параметров гетеродина в режиме СГП сначала может обеспечить приемник 420 СГП индикацией о погрешности частоты, а затем может скорректировать дрейф частоты, подав сигнал по шине 438 управления Г, пока беспроводный телефон 400 остается в режиме СГП.
Активная коррекция дрейфа частоты Г 450 минимизирует размывание сигнала, которое возникает, когда частота Г 450 дрейфует на множестве элементов дискретизации частоты в процессе накопления последовательных результатов корреляции.
Компенсация погрешности ошибки Г 450 с использованием сигнала, подаваемого по шине 438 управления Г, может быть выполнена в перестраиваемом Г 200 с ФАПЧ-системой, как показано на фиг.2. Напомним, что, как следует из схемы 2, выходная частота 244 ФАПЧ-системы пропорциональна частоте выходного сигнала генератора 202 опорной частоты. Если известен коэффициент усиления ГУН генератора 202 опорной частоты, то можно определить изменение выходной частоты 244 для данного изменения напряжения настройки генератора опорной частоты. Таким образом, схема 430 определения параметров гетеродина на фиг.4 может вычислить напряжение для возбуждения шины 204 настройки генератора опорной частоты перестраиваемого гетеродина Г 200 с ФАПЧ-системой для компенсации определенной погрешности частоты.
На фиг.5 показан альтернативный вариант беспроводного телефона 500. Реализация беспроводного телефона 500 на фиг.5, по существу, идентична беспроводному телефону 400, показанному на фиг.4. Однако беспроводный телефон 500 на фиг.5 включает функцию дополнительного контроля передатчика 530. Беспроводный телефон 500, работающий в системе типа той, что определена стандартом TIA/EIA 95B, использует передатчик 520 для осуществления связи с базовыми станциями. Передатчик 520 включает в себя усилитель 522 мощности (УМ) для подачи достаточной мощности РЧ для обеспечения связи с базовыми станциями. Однако УМ 522 не очень эффективен и потребляет относительно большую мощность. Относительно низкий кпд усилителя 522 мощности приводит к тому, что большое количество мощности рассеивается в виде тепла. Большое тепловое рассеяние усилителя 522 мощности является основополагающим фактором, определяющим рабочую температуру телефонного приемопередатчика 510. Вдобавок, поскольку УМ 522 является точечным источником тепла, во всем беспроводном телефоне 500 создается температурный градиент. Схема 430 определения параметров гетеродина учитывает доминирующее значение УМ 522 в формировании условий эксплуатации беспроводного телефона 500. Когда беспроводный телефон 500 работает в первом режиме, схема 430 определения параметров гетеродина контролирует работу УМ 522.
Беспроводный телефон 500, функционирующий в системе связи МДКР типа той, что определена в стандарте TIA/EIA 95-B, не находится в рабочем состоянии постоянно. Усилитель 522 мощности периодически включается и выключается в соответствии с потребностями телефонного приемопередатчика 510. Время рабочего цикла усилителя 522 мощности может быть большим, как в случае с беспроводным телефоном 500, переходящим из состояния активного вызова в состояние ожидания, либо это время может быть маленьким, как в случае работы передатчика 520 в режиме передачи пакетированных данных. Очевидно, что рабочий цикл УМ 522 оказывает непосредственное влияние на тепловое рассеяние и соответствующий температурный градиент по всему беспроводному телефону 500.
Схема 430 управления гетеродином, работающая в первом режиме, контролирует работу УМ 522 по шине 524 управления. Первый режим может представлять собой режим телефонной связи, когда беспроводный телефон 500 находится на связи с беспроводной системой. Схема 430 определения параметров гетеродина определяет рабочий цикл УМ 522 либо путем усреднения циклов включения/выключения на заранее установленном числе отсчетов, либо путем сохранения текущего среднего значения циклов включения/выключения. Вычисленный рабочий цикл УМ 522 запоминается в памяти 434.
Схема 430 определения параметров гетеродина переключается с контроля усилителя 522 мощности на управление УМ 522 во втором режиме. Второй режим может представлять собой режим СГП, в котором беспроводный телефон 500 обнаруживает сигналы от спутников СГП и определяет положение беспроводного телефона 500. Схема 430 определения параметров гетеродина извлекает из памяти 434 вычисленный рабочий цикл и приводит в действие УМ 522 с этим рабочим циклом. Усилители мощности (не показаны) в телефонном приемопередатчике 510 во втором режиме заблокированы так, что передатчик 520 не излучает никаких помех. Стабильные условия эксплуатации беспроводного телефона 500 создаются путем циклического включения УМ 522 с тем же рабочим циклом, с каким он приводился в действие ранее в первом режиме. Таким образом, переход из первого режима во второй режим не приводит к полному блокированию УМ 522, приводящему к изменению температурного градиента в беспроводном телефоне 500. В альтернативном варианте схема 430 определения параметров гетеродина просто активизирует УМ 522 без использования рабочего цикла. Этот альтернативный вариант имеет преимущество с точки зрения простоты реализации. Контроль рабочего цикла УМ 522 в первом режиме не требуется. Однако такое упрощение достигается за счет соответствия условий эксплуатации. Простая активизация УМ 522 во втором режиме вероятней всего приведет к тому, что условия эксплуатации не будут повторять условия эксплуатации в первом режиме. Если УМ 522 в первом режиме не работал, то активизация УМ 522 при переходе во второй режим на практике приведет к максимальному изменению условий эксплуатации беспроводного телефона 500.
В другом варианте, где УМ 522 вдобавок к циклической работе имеет множество рабочих режимов, схема 430 определения параметров гетеродина также контролирует рабочий режим УМ 522, когда тот находится в первом режиме, и воспроизводит этот рабочий режим, когда УМ находится во втором режиме.
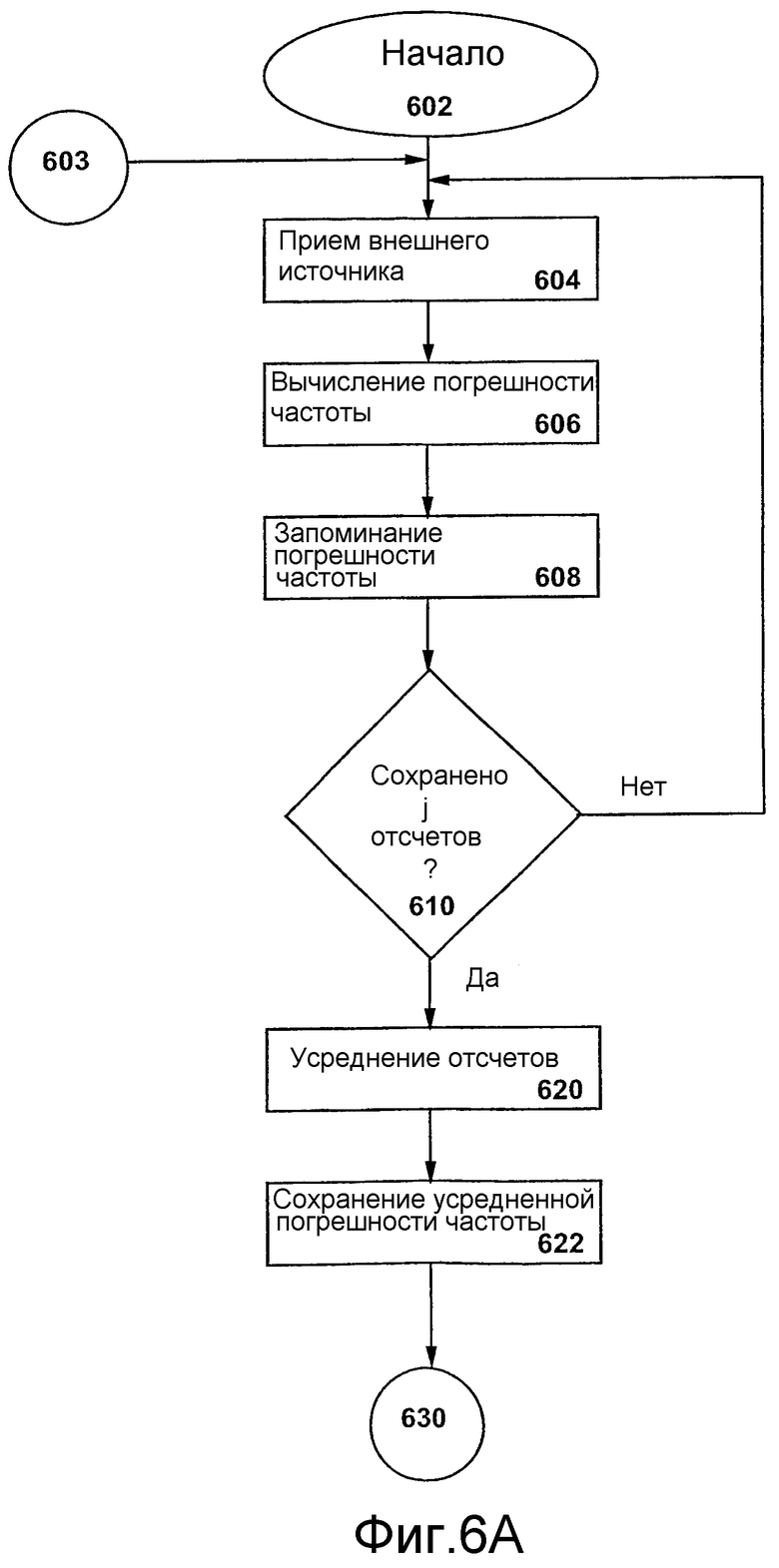
На фиг.6А и 6В представлена блок-схема процесса определения параметров гетеродина. Обратимся к фиг.6А, где процесс начинается в блоке 602. Блок 602 может представлять операцию инициирования определения параметров гетеродина управляющим процессором. Если процесс начался, программа переходит в блок 604, где выполняется прием от внешнего источника частоты. Сигнал от внешнего источника частоты может подаваться на вход приемника либо может приниматься через эфир, как описано для приемника на фиг.4 и 5. Внешний источник частоты используется в качестве источника опорной частоты в блоке 606 для вычисления погрешности частоты Г. Когда в качестве внешнего источника частоты используется пилот-сигнал МДКР, погрешность частоты Г определяет приемник МДКР. Программа переходит к блоку 608 и запоминает значение погрешности частоты, определенное в блоке 606. Затем программа переходит в блок 610 принятия решения, чтобы определить, накоплено ли заранее установленное количество j отсчетов погрешности частоты. Заранее установленное число j представляет собой число отсчетов, на котором усредняются отсчеты погрешности частоты. Это число может быть как малым, вплоть до единицы, так и большим настолько, насколько позволяют аппаратные средства и временные ограничения в устройстве, где реализуется усреднение. В случае если j отсчетов еще не накоплено, программа возвращается в блок 604 для получения дополнительных отсчетов. Как только будет накоплено заранее установленное количество отсчетов, программа переходит к блоку 620, где j отсчетов погрешности частоты усредняется. В альтернативном варианте может вычисляться скользящее среднее погрешности частоты. Скользящее среднее имеет преимущество, поскольку эта величина характеризует частоту Г на очень больших временных интервалах. Недостаток такого подхода заключается в том, что скользящее среднее не может быстро реагировать на изменения условий эксплуатации, что сказывается на погрешности частоты Г.
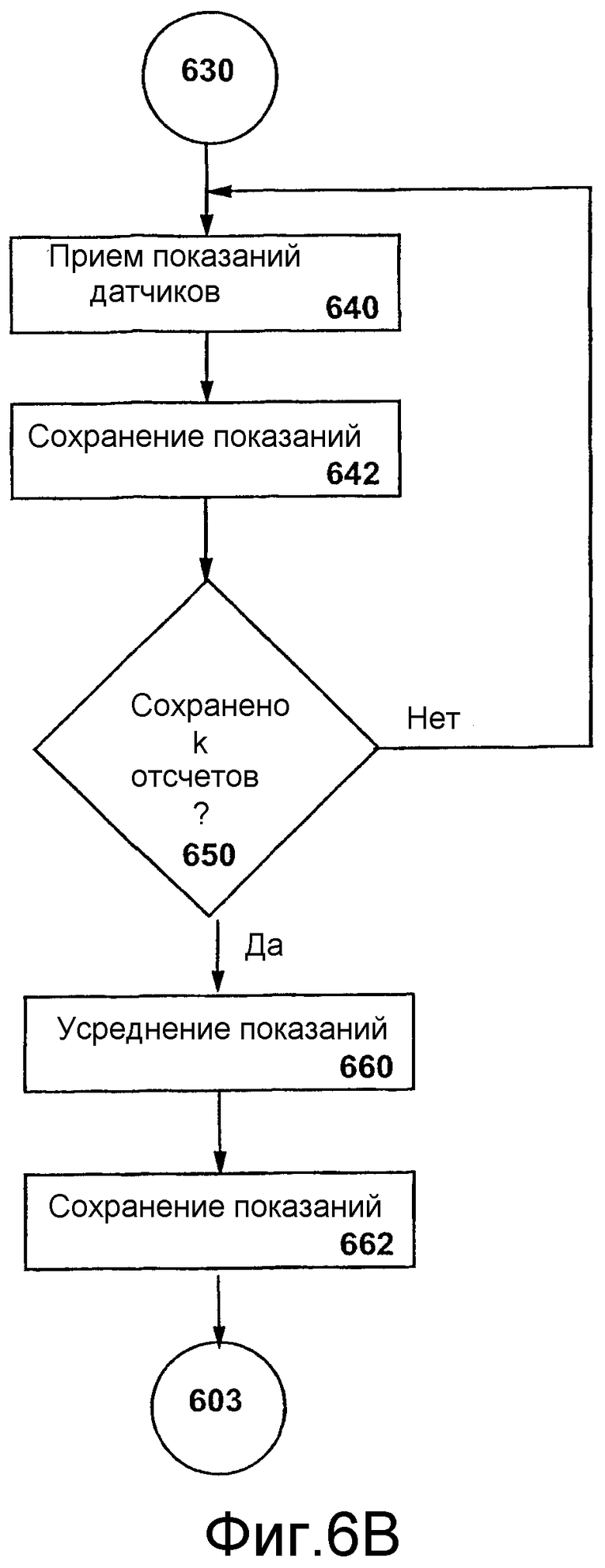
Как только будет выполнено усреднение отсчетов, программа переходит к блоку 622, где усредненная погрешность частоты запоминается в памяти. После запоминания усредненной погрешности частоты программа переходит в точку 630. Точка 630 не представляет собой какую-либо функцию программы. Она используется просто для связи фиг.6А и 6В. Программа продолжается на фиг.6В, где она переходит в блок 640, в котором происходит прием показаний датчиков. Необходимо иметь показание минимум от одного датчика, а верхний предел количества показаний датчиков ограничивается только объемом аппаратных средств и производительностью при обработке данных в устройстве, где реализуется данная программа. Одним из контролируемых параметров является рабочее состояние УМ. Для контроля рабочего состояния УМ датчик не требуется, а необходимо лишь контролировать шину активности УМ. Каждое показание датчиков запоминается в памяти в блоке 642. Затем программа переходит к блоку 650 принятия решения, чтобы определить, накопилось ли второе заранее установленное количество отсчетов k от каждого датчика. Если второе заранее установленное количество показаний датчика (k) еще не получено и не запомнено, то программа возвращается в блок 640 для получения дополнительных отчетов. Как только второе заранее установленное количество отсчетов датчика (k) будет получено и запомнено, программа переходит к блоку 660, где показания каждого датчика усредняются по k ранее сохраненным значениям. Как и в случае с числом отсчетов погрешности частоты, подлежащих усреднению, количество показаний датчика, по которому должно выполняться усреднение, выбирается разработчиком. Усреднение нескольких отсчетов активности УМ дает оценку рабочего цикла УМ на периоде усреднения. Возможно, что окажется предпочтительным сохранять скользящее среднее рабочего состояния УМ, что позволит непрерывно обновлять рабочий цикл после каждого отсчета. Усредненные показания датчиков запоминаются в памяти в блоке 662. Процесс определения параметров гетеродина завершается в этом месте, и программа может либо закончиться, либо продолжать процесс непрерывного определения параметров Г, циклически возвращаясь в узел 603, как показано на фиг.6В.
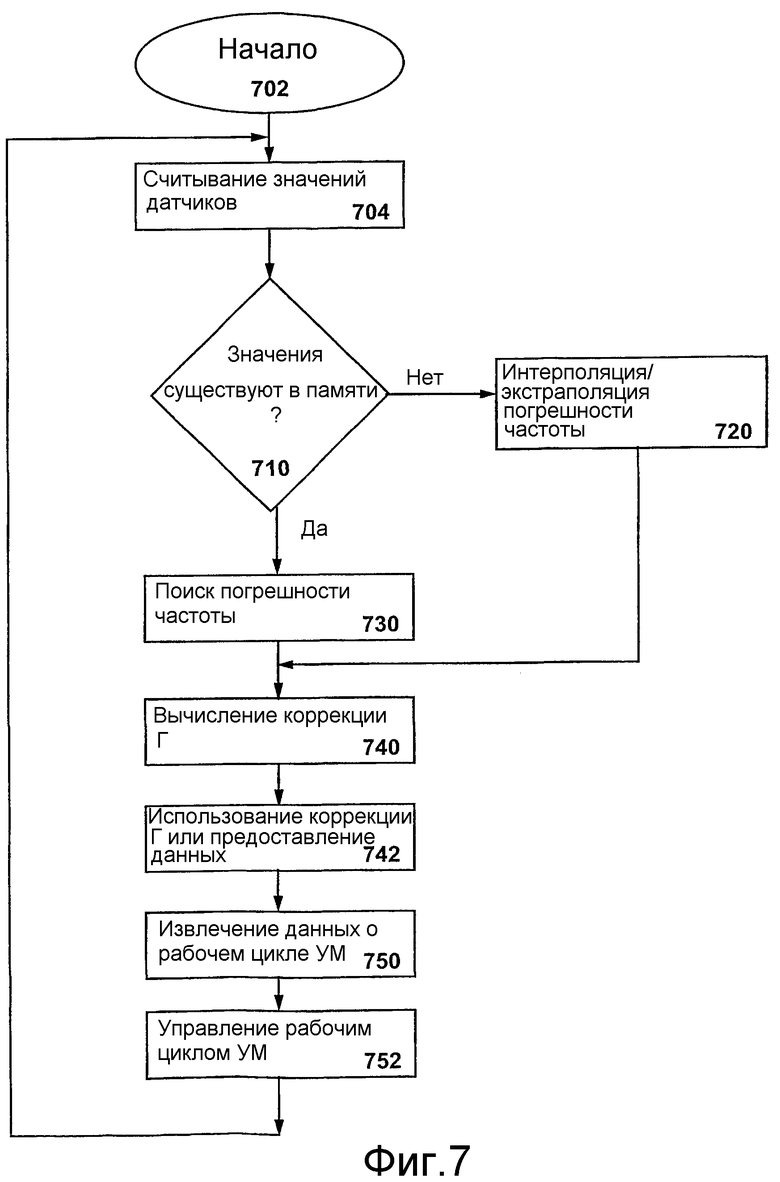
На фиг.7 представлена блок-схема программы компенсации Г, которая начинает действовать, как только будет выполнен по меньшей мере один цикл программы определения параметров гетеродина Г.
Программа начинается с блока 702. Начало программы может представлять инициализацию режима СГП в беспроводном телефоне, в котором имеется как приемник СГП, так и телефонный приемопередатчик. В альтернативном варианте начало программы может представлять конец одного цикла в программе определения параметров гетеродина Г, где компенсация Г происходит непрерывно по мере реализации процесса определения параметров гетеродина Г.
Затем программа переходит к блоку 704, где считываются показания датчиков. Эти показания датчиков представляют собой самые последние показания. Затем программа переходит в блок 710 принятия решения, где значения датчиков сравниваются с ранее запомненными показаниями. Если показания датчиков совпадают с уже существующими значениями в массиве с данными, характеризующими Г, то тогда программа переходит к блоку 730, где в указанном массиве выполняется поиск погрешности частоты, соответствующей сохраненным значениям датчиков. В противном случае, если в массиве с данными, характеризующими Г, эти значения датчиков уже не существуют, то программа переходит к блоку 720, где вычисляется погрешность частоты на основе интерполяции или экстраполяции сохраненных показаний датчиков для согласования последних показаний датчиков и формирования в результате расчетной погрешности частоты Г. Из блока 720 или из блока 730 программа переходит к блоку 740, где вычисляется соответствующая коррекция Г на основе расчетной погрешности частоты Г. Коррекция Г вычисляется на основе определения погрешности частоты из массива данных, характеризующих Г, и вычисления сигнала управления Г на основе данных о передаточной функции, связывающей сигнал шины управления Г с выходной частотой. В случае если по шине управления Г подается сигнал управления напряжением для ГУН, передаточная функция определяется коэффициентом усиления ГУН. После определения коррекции Г программа переходит к блоку 742. В блоке 742 в Г подается коррекция Г. В альтернативном варианте, либо в дополнение к подаче коррекции Г, программа может передать данные в приемник СГП. Эти данные могут состоять из данных об определенной погрешности частоты Г и коррекции, поданной в Г. Затем программа переходит к блоку 750, где из памяти извлекается вычисленное значение рабочего цикла УМ. Далее программа переходит к блоку 752, где УМ приводится в действие с вычисленным рабочим циклом. Затем программа возвращается к блоку 704 для обновления коррекции Г на основе новых показаний датчиков. Используя указанную информацию и скомпенсированный Г, приемник СГП имеет возможность быстрее и эффективнее обнаруживать сигналы.
Приведенное выше описание предпочтительных вариантов предложено для того, чтобы предоставить возможность специалистам в данной области техники выполнить или использовать настоящее изобретение. Специалистам в данной области техники очевидна возможность различных модификаций этих вариантов, а также то, что определенные здесь общие принципы можно применить для других вариантов без необходимости использования изобретательских навыков. Таким образом, подразумевается, что настоящее изобретение не ограничивается приведенными здесь вариантами, а должно соответствовать самому широкому объему, определенному в прилагаемой формуле изобретения.
Изобретение относится к электронным схемам. Достигаемый технический результат - уменьшение погрешности частоты гетеродина (Г) для сокращения области поиска, уменьшения времени поиска и обнаружения сигнала приемником. Устройство для компенсации погрешности частоты гетеродина (Г) содержит гетеродин, приемопередатчик, по меньшей мере один датчик для контроля по меньшей мере одной переменной, которая вносит поправку в погрешность частоты гетеродина, и схему определения параметров гетеродина, соединенную с усилителем мощности, который входит в состав приемопередатчика, и по меньшей мере с одним датчиком. Способ компенсации погрешности частоты гетеродина (Г) характеризуется тем, что усредняют и сохраняют в первом режиме показания по меньшей мере одного датчика, который контролирует факторы, влияющие на погрешность частоты гетеродина, при этом показания включают в себя значения параметров усилителя мощности, включающих в себя действующий рабочий цикл и температуру, при этом усилитель мощности входит в состав приемопередатчика, и в первом режиме используют внешний источник стабильной частоты для приемника как источник опорной частоты, усредняют и сохраняют в первом режиме несколько значений погрешности частоты гетеродина, определенных приемопередатчиком путем сравнения частоты внешнего источника стабильной частоты с выходной частотой гетеродина, и компенсируют погрешность частоты гетеродина во втором режиме, основываясь на показаниях по меньшей мере одного датчика и погрешности частоты Г, контролируемой в первом режиме. 2 н. и 17 з.п. ф-лы, 8 ил.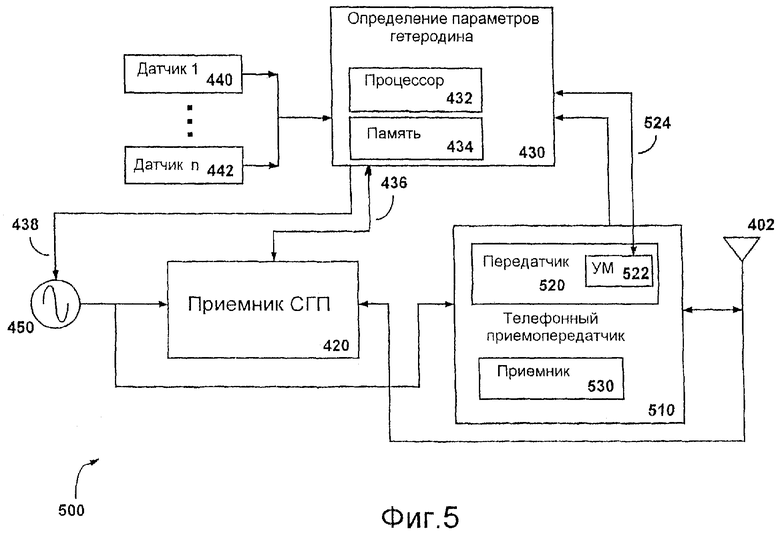
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УДАЛЕННОГО ОБЪЕКТА, СПОСОБ СЛЕЖЕНИЯ ЗА ПОДВИЖНЫМ ОБЪЕКТОМ И ИНТЕГРИРОВАННАЯ СИСТЕМА, ОСУЩЕСТВЛЯЮЩАЯ ЭТИ СПОСОБЫ | 1993 |
|
RU2128884C1 |
| Огнетушитель | 0 |
|
SU91A1 |
| Устройство для гибки с растяжением деталей из профилей | 1972 |
|
SU484918A1 |

