ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к автоматическому вождению и, в частности, к способу управления рулевым управлением, устройству управления рулевым колесом для автоматического вождения и транспортному средству.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0002] Система вращения с серводвигателем (включающая серводвигатель и привод) в транспортных средствах имеет много избыточных конструкций, высокую закупочную стоимость и низкий крутящий момент и эффективность работы. Например, система вращения с серводвигателем может включать рулевую колонку, датчик крутящего момента, серводвигатель, модуль управления и другие компоненты и система вращения с серводвигателем начинает работать после запуска транспортного средства. Когда скорость транспортного средства ниже, чем определенная скорость, модуль управления передает управляющую команду серводвигателю на основании данных, таких как крутящий момент рулевого управления, направление вращения, скорость транспортного средства и т.д., чтобы позволить серводвигателю выдавать крутящий момент, имеющий соответствующую величину и направление, для генерирования вспомогательной мощности.
[0003] Однако в данной области автономных транспортных средств, таких как сельскохозяйственные машины, автоматическая система рулевого управления сама по себе несет только функцию рулевого управления. Если требуется обратная передача информации об угле поворота, автоматическая система рулевого управления требует дополнительного внешнего датчика угла, что увеличивает стоимость всей системы рулевого управления. В автономных транспортных средствах стоимость датчиков относительно важна. Система управления автономных транспортных средств требует получения различных параметров с помощью различных типов датчиков и принимает решения на основании этих параметров, чтобы автоматически управлять транспортным средством и реализовывать автоматическое вождение.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Настоящее изобретение предоставляет способ управления рулевым управлением, устройство управления рулевым колесом для автоматического вождения и транспортное средство, при этом система с двигателем для вращения рулевого колеса может управляться без какого-либо дополнительного датчика угла, тем самым сокращая затраты на установку и эксплуатационные расходы.
[0005] Настоящее изобретение предоставляет способ управления рулевым управлением, устройство управления рулевым колесом для автоматического вождения и транспортное средство, при этом система с двигателем для вращения рулевого колеса может корректировать направление на основании команд системы управления транспортного средства, так что транспортное средство перемещается по ожидаемому запланированному пути.
[0006] Настоящее изобретение предоставляет способ управления рулевым управлением, устройство управления рулевым колесом для автоматического вождения и транспортное средство, при этом система с двигателем для вращения рулевого колеса может автоматически определять, что рулевое управление осуществляется водителем-человеком и управлять транспортным средством для возврата к стандартному режиму вождения.
[0007] Настоящее изобретение предоставляет способ управления рулевым управлением, устройство управления рулевым колесом для автоматического вождения и транспортное средство, при этом система с двигателем для вращения рулевого колеса приводит рулевое колесо в движение с помощью двигателя и определяет угол поворота рулевого колеса путем получения угла поворота двигателя, таким образом, для определения угла поворота рулевого колеса не требуется внешний датчик угла.
[0008] В соответствии с одним аспектом настоящего изобретения предлагается способ управления рулевым управлением для автоматического вождения, при этом способ управления рулевым управлением включает:
[0009] двигатель рулевого колеса, приводящий рулевое колесо в движение для вращения на заданный угол в ответ на команду рулевого управления, при этом угол поворота рулевого колеса управляется вращением двигателя рулевого колеса.
[0010] Согласно одному варианту осуществления настоящего изобретения способ управления рулевым управлением дополнительно включает:
[0011] передачу команды рулевого управления на устройство управления рулевым колесом, когда транспортное средство перемещается автоматически по запланированному пути и отклонение между фактическим путем транспортного средства и запланированным путем превышает заданное значение, при этом устройство управления рулевым колесом содержит двигатель рулевого колеса и рулевое колесо.
[0012] Согласно одному варианту осуществления настоящего изобретения способ управления рулевым управлением дополнительно включает:
[0013] управление двигателем рулевого колеса для прекращения вращения, чтобы рулевое колесо оставалось в текущем положении, когда фактический путь транспортного средства скорректирован настолько, что отклонение между фактическим путем и запланированным путем меньше заданного значения.
[0014] Согласно одному варианту осуществления настоящего изобретения способ управления рулевым управлением дополнительно включает:
[0015] передачу команды рулевого управления на устройство управления транспортным средством, когда транспортное средство требует разворота или заднего хода, при этом устройство управления рулевым колесом управляется устройством управления транспортным средством.
[0016] Согласно одному варианту осуществления настоящего изобретения способ управления рулевым управлением дополнительно включает:
[0017] передачу устройством управления транспортным средством команды на устройство управления рулевым колесом для приведения двигателя рулевого колеса устройства управления рулевым колесом в рабочий режим;
[0018] определение того, находится ли устройство управления рулевым колесом в состоянии простоя путем получения параметров состояния двигателя рулевого колеса; и
[0019] управление устройством управления рулевым колесом для вращения на основании команды рулевого управления от устройства управления транспортным средством, когда устройство управления рулевым колесом находится в состоянии простоя.
[0020] Согласно одному варианту осуществления настоящего изобретения способ управления рулевым управлением дополнительно включает:
[0021] получение скорости вращения двигателя рулевого колеса;
[0022] сравнение скорости вращения двигателя рулевого колеса с заданной скоростью вращения в команде рулевого управления; и
[0023] управление двигателем рулевого колеса для его ускорения, когда определено, что скорость вращения двигателя рулевого колеса ниже заданной скорости вращения.
[0024] Согласно одному варианту осуществления настоящего изобретения способ управления рулевым управлением дополнительно включает:
[0025] корректировку курсового угла транспортного средства до заданного угла; и
[0026] управление двигателем рулевого колеса для прекращения вращения, чтобы рулевое колесо прекратило вращение.
[0027] Согласно одному варианту осуществления настоящего изобретения способ управления рулевым управлением дополнительно включает:
[0028] управление двигателем рулевого колеса для прекращения работы, чтобы управлять переходом транспортного средства в состояние ручного управления рулевым управлением, когда управление рулевым колесом осуществляется вручную водителем-человеком.
[0029] Согласно другому аспекту настоящего изобретения обеспечивается устройство управления рулевым колесом, применяемое для рулевого управления при вождении транспортного средства, при этом устройство управления рулевым колесом содержит:
[0030] рулевое колесо и
[0031] двигатель рулевого колеса, при этом рулевое колесо соединено с двигателем рулевого колеса и приводится в движение двигателем, двигатель рулевого колеса соединен с возможностью управления с устройством управления транспортным средством транспортного средства, устройство управления транспортным средством передает команду на двигатель рулевого колеса на основании команды автоматического вождения для управления двигателем рулевого колеса для вращения рулевого колеса на заданный угол, при этом угол поворота рулевого колеса управляется вращением двигателя рулевого колеса.
[0032] Согласно одному варианту осуществления настоящего изобретения устройство управления рулевым колесом дополнительно содержит:
[0033] датчик двигателя рулевого колеса, получающий параметры вращения двигателя рулевого колеса и сообщающийся с устройством управления транспортным средством, при этом команда, передаваемая устройством управления транспортным средством, включает заданное значение параметра вращения двигателя рулевого колеса.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
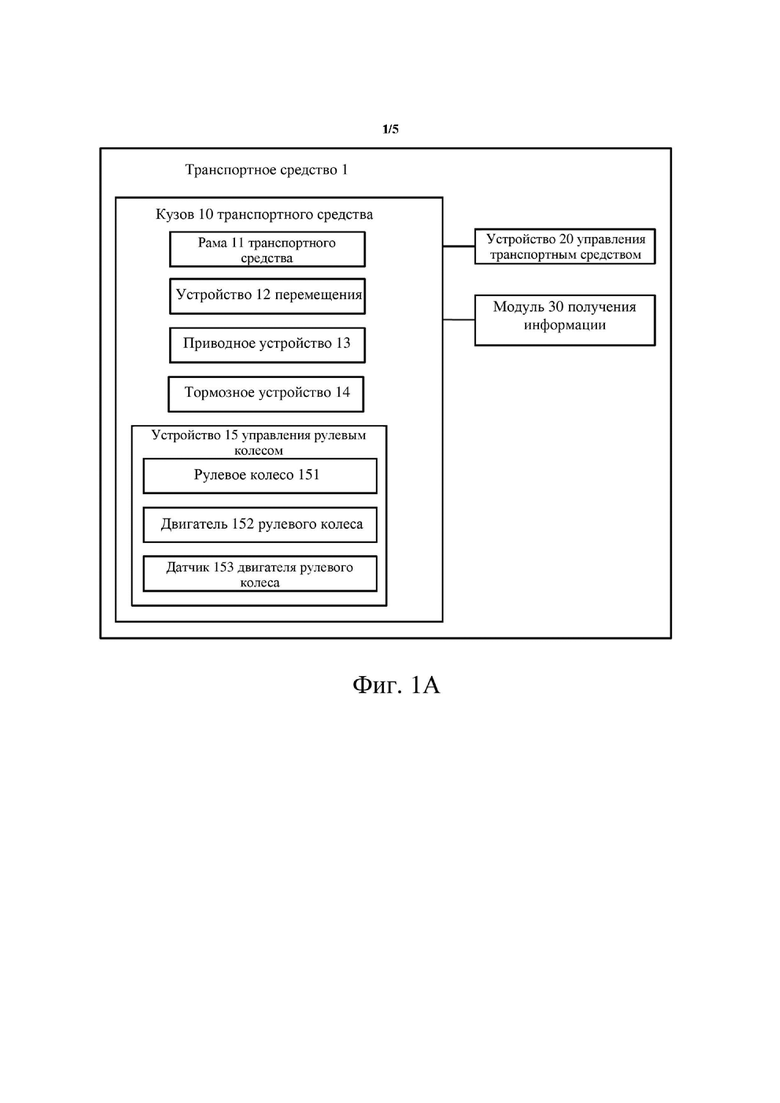
[0034] На фиг. 1A представлен схематический вид одного варианта осуществления транспортного средства с устройством управления рулевым колесом согласно настоящему изобретению.
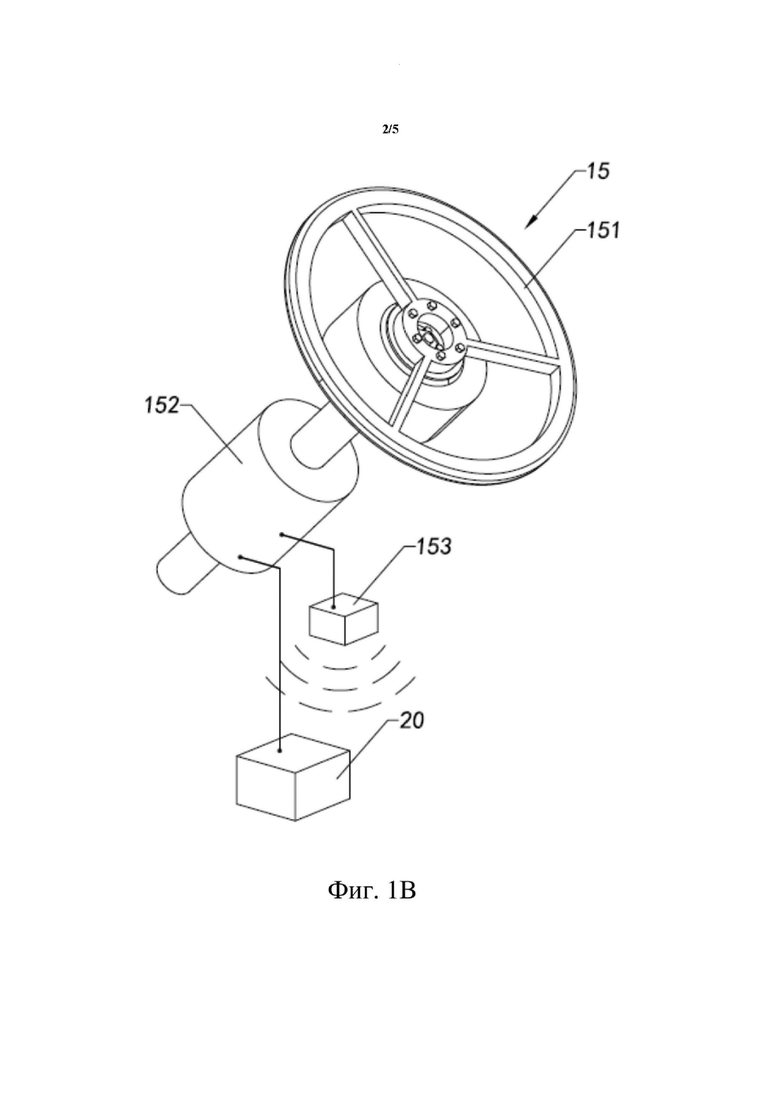
[0035] На фиг. 1B представлен схематический вид одного варианта осуществления устройства управления рулевым колесом согласно настоящему изобретению.
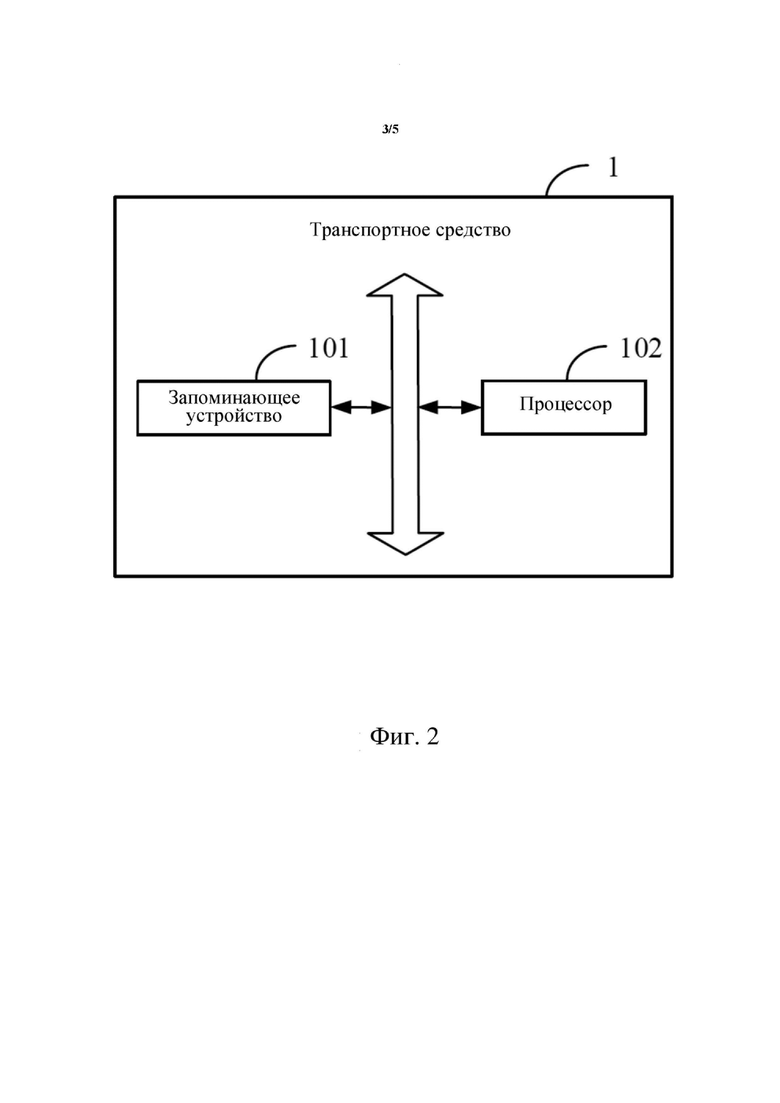
[0036] На фиг. 2 представлена блок-схема одного варианта осуществления транспортного средства согласно настоящему изобретению.
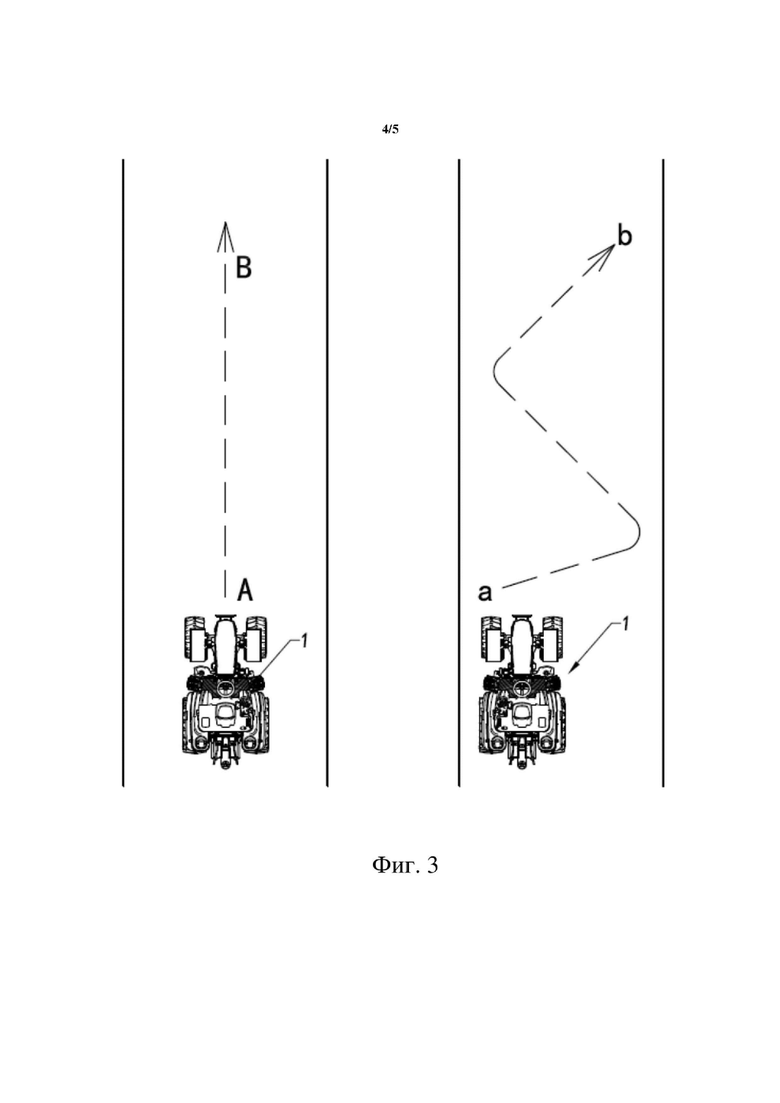
[0037] На фиг. 3 представлен схематический вид рабочей среды одного варианта осуществления способа управления рулевым управлением согласно настоящему изобретению.
[0038] На фиг. 4 представлена блок-схема одного варианта осуществления способа управления рулевым управлением согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ
[0039] Следующее описание используется для раскрытия настоящего изобретения, чтобы специалист в данной области техники мог реализовать настоящее изобретение. Варианты осуществления в следующем описании являются лишь примерами, и специалист в данной области техники может придумать другие очевидные вариации. Основные принципы настоящего изобретения, определенные в следующем описании, могут быть применены к другим вариантам осуществления, модифицированным вариантам осуществления, усовершенствованным вариантам осуществления, эквивалентным вариантам осуществления и другим техническим решениям, которые не отклоняются от сущности и объема настоящего изобретения.
[0040] Специалист в данной области техники должен понимать, что согласно настоящему изобретению ориентация или взаимоположение, указанное терминами «продольный», «поперечный», «верхний», «нижний», «передний», «задний», «левый», «правый», «вертикальный», «горизонтальный», «верхний», «нижний», «внутренний», «наружный» и т. д., является ориентацией или взаимоположением, показанным на графических материалах, которые предусмотрены для удобства описания настоящего изобретения и упрощения описания. Это не является указанием или предположением, что упомянутое устройство или компонент должны иметь конкретную ориентацию, должны быть сконструированы и эксплуатироваться в конкретной ориентации, и приведенные выше термины не следует понимать как ограничение настоящего изобретения.
[0041] Можно понять, что форму единственного числа следует понимать как «по меньшей мере один» или «один или более», то есть в одном варианте осуществления количество компонентов может составлять один, а в другом варианте осуществления количество компонентов может также составлять несколько, термин «один» нельзя понимать как ограничение в отношении количества.
[0042] Рассмотрим фиг. 1A и 1B, на которых соответственно изображены устройство 15 управления рулевым колесом и транспортное средство 1 с рулевым колесом 151 согласно одному варианту осуществления настоящего изобретения.
[0043] Вождение транспортного средства 1 может осуществляться автоматически или вручную, тип транспортного средства 1 может быть, но без ограничения, автомобилем, пассажирским автомобилем, грузовым автомобилем, сельскохозяйственной машиной или моторизованной тележкой на заводе. Понятно, что устройство 15 управления рулевым колесом может использоваться не только в транспортном средстве 1 из приведенного выше примера, но также в подвижной системе с рулевым колесом, которая может реализовывать рулевое управление посредством манипулирования рулевым колесом. Понятно, что транспортное средство 1 может быть транспортным средством с двигателем внутреннего сгорания, электрическим транспортным средством или транспортным средством, использующим другой источник энергии.
[0044] Транспортное средство 1 включает кузов 10 транспортного средства и устройство 20 управления транспортным средством, при этом кузов 10 транспортного средства соединен с возможностью управления с устройством 20 управления транспортным средством. Кузов 10 транспортного средства может включать раму 11 транспортного средства, устройство 12 перемещения, приводное устройство 13, тормозное устройство 14 и устройство 15 управления рулевым колесом. Устройство 12 перемещения, приводное устройство 13, тормозное устройство 14 и устройство 15 управления рулевым колесом соответственно расположены на раме 11 транспортного средства. Устройство 12 перемещения соединено с устройством 20 управления транспортным средством и может приводиться в движение устройством 20 управления транспортным средством, и когда устройство 12 перемещения находится в движении, тормозное устройство 14 может замедлить и остановить движение. Устройство 15 управления рулевым колесом управляет рулевым управлением устройства 12 перемещения, то есть управляет характером и процессом рулевого управления устройства 12 перемещения.
[0045] Устройство 12 перемещения, приводное устройство 13, тормозное устройство 14 и устройство 15 управления рулевым колесом соединены с возможностью управления с устройством 20 управления транспортным средством, и устройство 20 управления транспортным средством управляет кузовом 10 транспортного средства на основании данных, полученных различными датчиками, так что кузов 10 транспортного средства может управляться так, как требуется.
[0046] Транспортное средство 1 дополнительно включает устройство 30 получения информации, при этом устройство 30 получения информации включает несколько датчиков, таких как GPS, инфракрасный датчик и датчик угла, и получает информацию о самом кузове 10 транспортного средства или информацию снаружи транспортного средства 1, такую как информацию об окружающей среде или информацию о внешних командах. Устройство 20 управления транспортным средством сообщается с устройством 30 получения информации и обрабатывает данные, полученные устройством 30 получения информации, и затем передает команды для управления кузовом 10 транспортного средства, на основании результата обработки.
[0047] Устройство 15 управления рулевым колесом включает рулевое колесо 151 и двигатель 152 рулевого колеса. Рулевое колесо 151 соединено с двигателем 152 рулевого колеса и может приводиться в движение двигателем 152 рулевого колеса, и выходной вал двигателя 152 рулевого колеса вращается, чтобы приводить в движение рулевое колесо 151 для вращения.
[0048] Стоит отметить, что устройство 15 управления рулевым колесом не требует дополнительного датчика угла для определения угла поворота рулевого колеса 151. Вращение рулевого колеса 151 реализуется за счет вращения выходного вала двигателя 152 рулевого колеса, при этом угол поворота рулевого колеса 151 определяется за счет получения угла поворота выходного вала двигателя 152 рулевого колеса. Кроме того, устройство 15 управления рулевым колесом включает датчик 153 двигателя рулевого колеса. Датчик 153 двигателя рулевого колеса выполнен с возможностью определять состояние двигателя 152 рулевого колеса, такое как скорость, направление рулевого управления или другие параметры двигателя 152 рулевого колеса. Датчик 153 двигателя рулевого колеса сообщается с устройством 20 управления транспортным средством, так что устройство 20 управления транспортным средством может определять состояние двигателя 152 рулевого колеса в реальном времени и передавать команды на двигатель 152 рулевого колеса на основании состояния двигателя 152 рулевого колеса.
[0049] Рассмотрим фиг. 2, в одном варианте осуществления транспортное средство 1 дополнительно включает запоминающее устройство 101 и по меньшей мере один процессор 102. По меньшей мере один процессор 102 используется для исполнения множества модулей и других приложений. Запоминающее устройство 101 хранит компьютерные команды множества модулей и одну или более программ, таких как приложения транспортного средства 1. Запоминающее устройство 101 может представлять собой энергонезависимый машиночитаемый носитель данных любого типа или иное компьютерное запоминающее устройство, такое как, например, накопитель на жестких дисках, компакт-диск, цифровой видеодиск, накопитель на магнитной ленте, карта памяти (например, модуль памяти, карта памяти «Smart media», флеш-карта «Compact flash») или иной подходящий носитель данных. По меньшей мере один процессор 102 может представлять собой центральное процессорное устройство (CPU), микропроцессор или другую микросхему обработки данных, которая выполняет функции обработки данных в транспортном средстве 1.
[0050] В одном варианте осуществления устройство 20 управления транспортным средством может представлять собой одно из по меньшей мере одного процессора 102. Устройство 20 управления транспортным средством выполняет команды, хранящиеся в запоминающем устройстве 101, и команды могут использоваться для реализации способа управления рулевым управлением, приведенного в вариантах осуществления настоящего изобретения.
[0051] Например, со ссылкой на фиг. 3, изображен режим применения устройства 15 управления рулевым колесом согласно одному варианту осуществления в способе автоматического вождения транспортного средства 1.
[0052] Транспортное средство 1 автоматически перемещается по заданному пути от A к B. После движения транспортного средства 1 в течение некоторого периода времени устройство 20 управления транспортным средством на основании данных, полученных устройством 30 получения информации, определяет, что произошло определенное отклонение между текущим путем транспортного средства 1 и заданным путем. Если отклонение превышает заданный диапазон, устройство 20 управления транспортным средством, в зависимости от этой ситуации, передает команду на устройство 15 управления рулевым колесом для управления двигателем 152 рулевого колеса для его вращения, так что рулевое колесо 151 вращается, чтобы изменить направление перемещения кузова 10 транспортного средства.
[0053] В вышеописанном способе устройство 30 получения информации получает информацию о положении кузова 10 транспортного средства в реальном времени, например, информация о положении кузова 10 транспортного средства получается посредством GPS, при этом устройство 20 управления транспортным средством обрабатывает данные, полученные устройством 30 получения информации. Если результат обработки, определенный устройством 20 управления транспортным средством, таков, что текущий путь движения кузова 10 транспортного средства совпадает с заданным путем, устройство 20 управления транспортным средством передает команду на устройство 15 управления рулевым колесом на отмену вращения двигателя 152 рулевого колеса, и рулевое колесо 151 остается в таком положении, чтобы продолжить движение по заданному пути, при этом данные, относящиеся к текущему углу поворота двигателя 152 рулевого колеса, могут передаваться обратно в устройство 20 управления транспортным средством в реальном времени через устройство 30 получения информации.
[0054] Кроме того, если на основании данных, полученных устройством 30 получения информации, устройство 20 управления транспортным средством определяет, что кузов 10 транспортного средства снова отклоняется от заданного пути, то вышеуказанные шаги могут повторяться, и устройство 20 управления транспортным средством продолжает регулировать рулевое колесо 151 до тех пор, пока транспортное средство 1 автоматически не завершит заданный путь.
[0055] В соответствии с одним аспектом настоящего изобретения предлагается способ управления рулевым управлением для автоматического вождения, при этом способ управления рулевым управлением включает:
[0056] после того, как транспортное средство 1 начинает перемещаться автоматически, транспортное средство 1 автоматически перемещается по заданному направлению, как только путь в реальном времени транспортного средства 1 отклоняется от заданного пути и отклонение превышает заданное значение, устройство 20 управления транспортным средством передает команду на двигатель 152 рулевого колеса, чтобы управлять двигателем 152 рулевого колеса для вращения рулевого колеса 151, чтобы корректировать направление перемещения транспортного средства 1 до тех пор, пока отклонение между путем в реальном времени транспортного средства 1 и заданным путем не будет находиться в заданном диапазоне.
[0057] Конкретнее, когда отклонение превышает заданное значение, параметры вращения двигателя 152 рулевого колеса, такие как скорость вращения и направление вращения корректируются и параметры вращения передаются обратно в устройство 20 управления транспортным средством в реальном времени. Когда отклонение транспортного средства 1 скорректировано так, чтобы быть в пределах заданного диапазона, например, когда путь транспортного средства 1 совпадает с заданным путем, устройство 20 управления транспортным средством управляет двигателем 152 рулевого колеса для прекращения вращения, чтобы прекратить корректировку рулевого колеса 151, чтобы восстановить направление перемещения транспортного средства 1. Другими словами, в это время рулевое колесо 151 удерживается в скорректированном направлении. Когда отклонение снова становится больше заданного значения, устройство 20 управления транспортным средством повторно передает команду на двигатель 152 рулевого колеса для корректировки положения рулевого колеса 151 до тех пор, пока отклонение не вернется в пределы заданного диапазона или не прекратит отклоняться.
[0058] Например, когда транспортное средство 1 перемещается по прямой линии, по прошествии некоторого периода времени определяется, что транспортное средство 1 отклонилось влево, тогда устройство 20 управления транспортным средством управляет двигателем 152 рулевого колеса для вращения, чтобы транспортное средство перемещалось вправо для возврата к ожидаемой прямой линии, и рулевое колесо 151 удерживается в скорректированном положении. После того, как транспортное средство 1 возвращается к ожидаемому прямому пути и по прошествии некоторого периода времени транспортное средство 1 снова отклоняется вправо, таким образом, устройство 20 управления транспортным средством будет управлять двигателем 152 рулевого колеса для вращения в противоположную сторону для вращения рулевого колеса 151 так, чтобы транспортное средство 1 повернуло влево. Таким образом, положение рулевого колеса 151 непрерывно корректируется в зависимости от пути перемещения транспортного средства 1.
[0059] Должно быть понятно, что после того, как транспортное средство 1 возвращается к ожидаемой прямой линии, двигатель 152 рулевого колеса также может автоматически возвратиться в центральное положение и восстановить состояние до корректировки, так что рулевое колесо 151 управляется для возврата в центральное положение, то есть возврата в изначальное состояние. Другими словами, после завершения корректировки, рулевое колесо 151 может быть возвращено в центральное положение или может удерживаться в скорректированном состоянии.
[0060] Кроме того, если водителю-человеку внезапно необходимо отрегулировать направление движения транспортного средства 1 по требованию, водитель может вмешаться в любой момент и управлять рулевым колесом 151. Например, если транспортное средство 1 продолжает перемещаться по прямой линии и водитель поворачивает рулевое колесо 151 вправо, чтобы управлять транспортным средством 1 для перемещения вправо, устройство 15 управления рулевым колесом не будет работать, то есть, двигатель 152 рулевого колеса не вращает рулевое колесо 151 вопреки водителю-человеку, но позволяет рулевому колесу 151 поворачиваться под действием водителя-человека.
[0061] Устройство 15 управления рулевым колесом может определять участие водителя-человека в операции за счет обнаружения силы или противодействующей силы, испытываемой двигателем 152 рулевого колеса, хотя то, что устройство 15 управления рулевым колесом испытывает силу или противодействующую силу со стороны водителя-человека является всего лишь одним из средств обнаружения действий водителя-человека.
[0062] Кроме того, транспортное средство 1 с устройством 15 управления рулевым колесом может не только автоматически корректировать направление, когда имеют место отклонения от запланированного курса, но может также выполнять автоматическое рулевое управление.
[0063] Рассмотрим фиг. 4, транспортное средство 1 может автоматически разворачиваться на месте при необходимости. Конкретнее, устройство 20 управления транспортным средством транспортного средства 1 может получать внешние команды и передавать команду на устройство 15 управления рулевым колесом на основании внешних команд, чтобы управлять устройством 15 управления рулевым колесом для введения его в рабочее состояние. Кроме того, устройство 20 управления транспортным средством может получать параметры от устройства 15 управления рулевым колесом, такие как текущий угол поворота двигателя 152 рулевого колеса.
[0064] Если двигатель 152 рулевого колеса в данный момент находится в состоянии простоя, устройство 20 управления транспортным средством генерирует управляющую команду на основании параметров от устройства 15 управления рулевым колесом и внешних команд и управляет двигателем 152 рулевого колеса для вращения на основании определенной скорости вращения и направления вращения, чтобы вращать рулевое колесо 151.
[0065] Если рулевое колесо 151 в данный момент находится, например, в рабочем состоянии, и затем им манипулирует водитель-человек, устройство 20 управления транспортным средством может выдавать запросы на основании параметров от устройства 15 управления рулевым колесом.
[0066] Кроме того, устройство 30 получения информации получает состояние положения транспортного средства 1 в реальном времени, так что устройство 20 управления транспортным средством может определять, завершил ли кузов 10 транспортного средства путь или операцию, такую как разворот. Если транспортное средство 1 не завершило операцию и курсовой угол транспортного средства 1 не был скорректирован до ожидаемого угла, устройство 20 управления транспортным средством продолжает передавать команду на устройство 15 управления рулевым колесом для управления двигателем 152 рулевого колеса для продолжения вращения, так что продолжается корректировка рулевого колеса 151. Если устройство 20 управления транспортным средством определяет, что текущий курсовой угол транспортного средства 1 достиг ожидаемого угла на основании информации, полученной устройством 30 получения информации, тогда устройство 20 управления транспортным средством передает команду на устройство 15 управления рулевым колесом для управления двигателем 152 рулевого колеса устройства 15 управления рулевым колесом для прекращения вращения рулевого колеса 151.
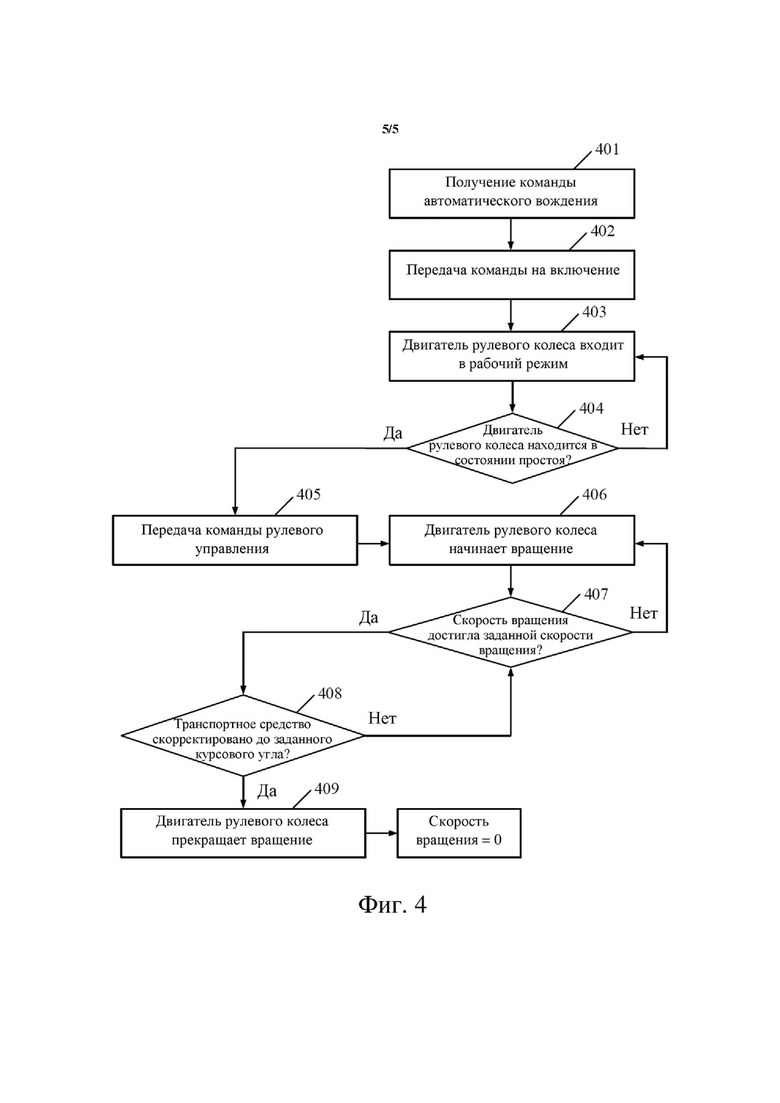
[0067] Способ управления рулевым управлением может включать:
[0068] В блоке 401 устройство 20 управления транспортным средством получает команду автоматического вождения, при этом команда автоматического вождения может быть от приложения, например, от мобильного электронного устройства, и пользователь может управлять транспортным средством 1 через мобильное электронное устройство;
[0069] в блоке 402 устройство 20 управления транспортным средством получает команды и передает команду на включение на двигатель 152 рулевого колеса;
[0070] в блоке 403 двигатель 152 рулевого колеса входит в рабочий режим на основании команды на включение от устройства 20 управления транспортным средством;
[0071] в блоке 404 получается состояние устройства 15 управления рулевым колесом и полученное состояние передается обратно на устройство 20 управления транспортным средством;
[0072] в блоке 405, если на основании полученного состояния устройства 15 управления рулевым колесом определено, что устройство 15 управления рулевым колесом находится в состоянии простоя, устройство 20 управления транспортным средством передает команду рулевого управления на двигатель 152 рулевого колеса для корректировки положения рулевого колеса 151;
[0073] в блоке 406 двигатель 152 рулевого колеса начинает вращаться при получении команды рулевого управления;
[0074] в блоке 407, если скорость вращения двигателя 152 рулевого колеса достигает заданной скорости вращения, двигатель 152 рулевого колеса прекращает вращение, если скорость вращения двигателя 152 рулевого колеса не достигает заданной скорости вращения, двигатель 152 рулевого колеса продолжает увеличивать скорость вращения;
[0075] в блоке 408 получается информация о курсовом угле транспортного средства 1.
[0076] В блоке 409, если транспортное средство 1 было скорректировано до заданного курсового угла, устройство 20 управления транспортным средством передает команду на устройство 15 управления рулевым колесом для управления двигателем 152 рулевого колеса для прекращения его работы до тех пор, пока скорость вращения двигателя 152 рулевого колеса не уменьшиться до нуля. Если транспортное средство 1 не скорректировано до заданного курсового угла, устройство 20 управления транспортным средством продолжает передавать команду на устройство 15 управления рулевым колесом для управления устройством 15 управления рулевым колесом для продолжения выполнения корректировки.
[0077] Дополнительно, в других вариантах осуществления способ управления рулевым управлением включает:
[0078] в ответ на команду рулевого управления приведение рулевого колеса 151 в движение двигателем 152 рулевого колеса для вращения на заданный угол, при этом угол поворота рулевого колеса 151 регулируется вращением двигателя 152 рулевого колеса;
[0079] передачу команды рулевого управления на устройство 15 управления рулевым колесом, если транспортное средство 1 автоматически движется по запланированному пути, и отклонение между фактическим путем транспортного средства 1 и запланированным путем превышает заданное значение; и
[0080] повторную передачу команды рулевого управления на устройство 15 управления рулевым колесом, так что отклонение между фактическим путем и запланированным путем транспортного средства 1 может поддерживаться настолько, насколько возможно, если фактический путь транспортного средства 1 скорректирован, и отклонение между фактическим путем транспортного средства 1 и запланированным путем становится меньше, чем заданное значение.
[0081] Конкретнее, когда транспортное средство 1 перемещается по прямой линии и по прошествии некоторого периода времени определяется, что путь перемещения транспортного средства 1 отклоняется вправо, осуществляется передача команды рулевого управления для управления транспортным средством 1 для поворота влево до тех пор, пока отклонение между путем перемещения и запланированным путем не станет меньше, чем заданное значение. После того, как отклонение между путем перемещения транспортного средства 1 и запланированным путем снова становится меньше, чем заданное значение, устройство 20 управления транспортным средством продолжает передавать команду рулевого управления на устройство 15 управления рулевым колесом транспортного средства 1 для управления рулевым колесом 151 для возврата на определенный угол к центральному положению, чтобы уменьшить возможность увеличения отклонения между фактическим путем транспортного средства 1 и запланированным путем.
[0082] Таким образом, до того, как отклонение между фактическим путем транспортного средства 1 и запланированным путем увеличится, рулевое управление рулевого колеса 151 транспортного средства 1 может быть скорректировано заранее. То есть рулевое колесо 151 транспортного средства 1 может корректироваться заранее.
[0083] В процессе рулевого управления всякий раз, когда рулевое колесо 151 переходит под ручное управление, данные устройства 15 управления рулевым колесом могут передаваться обратно в устройство 20 управления транспортным средством, и устройство 20 управления транспортным средством может определять приоритет ручного вмешательства как более высокий, чем собственная команда рулевого управления.
[0084] При ручном вмешательстве на рулевое колесо 151 двигатель 152 рулевого колеса может прекращать работу, так что пользователь-человек может полностью управлять рулевым колесом 151. Также может быть, что двигатель 152 рулевого колеса играет вспомогательную роль. Конкретнее, после ручного вмешательства на рулевое колесо 151 устройство 20 управления транспортным средством может определять направление вращения рулевого колеса 151 на основании данных, полученных датчиком 153 двигателя рулевого колеса от двигателя 152 рулевого колеса. Когда рулевое колесо 151 вращается в некотором направлении, устройство 20 управления транспортным средством передает команду на двигатель 152 рулевого колеса на основании данных, определенных датчиком 153 двигателя рулевого колеса, для управления двигателем 152 рулевого колеса, чтобы вращать рулевое колеса 151 по направлению, в котором вращается рулевое колесо 151. Пользователю-человеку будет более удобно вручную управлять рулевым колесом 151, особенно в случае управления большим транспортным средством.
[0085] Кроме того, устройство 15 управления рулевым колесом имеет экстренный механизм. Конкретнее, устройство 30 получения информации транспортного средства 1 непрерывно получает информацию об окружающей среде транспортного средства 1 во время автоматического вождения. После того, как пользователь-человек вмешивается в рулевое колесо 151, управление рулевым колесом 151 осуществляется пользователем-человеком. Если устройство 20 управления транспортным средством определяет, что впереди находится препятствие на основании информации, полученной устройством 30 получения информации, но пользователь-человек не предпринимает действия по обеспечению безопасности в течение заданного времени, такие как руление в сторону или вокруг, и если транспортное средство 1 продолжает двигаться в текущем направлении, то транспортное средство 1 столкнется с препятствием. В этом случае устройство 20 управления транспортным средством может передавать команду на устройство 15 управления рулевым колесом для управления двигателем 152 рулевого колеса для вращения рулевого колеса 151. Если пользователь-человек осуществляет рулевое управление транспортным средством 1 во время этого процесса, но направление руления противоположно направлению руления в команде устройства 20 управления транспортным средством, то приоритет команды, переданной устройством 20 управления транспортным средством, выше, чем у команды ручного управления, и транспортное средство 1 поворачивает, чтобы избежать препятствия под управлением устройства 20 управления транспортным средством.
[0086] Специалист в данной области техники должен понимать, что приведенное выше описание и варианты осуществления настоящего изобретения, показанные на графических материалах, являются лишь примерами и не ограничивают настоящее изобретение. Цель настоящего изобретения была полностью и эффективно достигнута. Функции и конструктивные принципы настоящего изобретения были показаны и объяснены в вариантах осуществления. Без отступления от принципов варианты осуществления настоящего изобретения могут иметь любое изменение формы или модификацию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОДДЕРЖКИ РУЛЕВОГО УПРАВЛЕНИЯ | 2018 |
|
RU2685108C1 |
| РУЛЕВОЙ ПЕРЕКЛЮЧАТЕЛЬ | 2019 |
|
RU2770254C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЖДЕНИЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЖДЕНИЕМ | 2019 |
|
RU2792474C1 |
| АВТОМАТИЧЕСКОЕ ПОВТОРНОЕ ЦЕНТРИРОВАНИЕ СИСТЕМЫ РУЛЕВОГО УПРАВЛЕНИЯ | 2015 |
|
RU2684824C2 |
| УСТРОЙСТВО ДЛЯ АКТИВНОГО РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И МЕХАНИЗМ РУЛЕВОГО УПРАВЛЕНИЯ С ТАКИМ УСТРОЙСТВОМ | 2010 |
|
RU2503570C1 |
| УСТРОЙСТВО РУЛЕВОГО УПРАВЛЕНИЯ И СПОСОБ РУЛЕВОГО УПРАВЛЕНИЯ | 2013 |
|
RU2632543C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2749924C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОУСИЛИТЕЛЕМ РУЛЕВОГО УПРАВЛЕНИЯ | 2012 |
|
RU2606354C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2505432C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2503559C2 |
Группа изобретений относится к автоматическому вождению и, в частности, к способу управления рулевым управлением, устройству управления рулевым колесом для автоматического вождения и транспортному средству. Способ управления транспортным средством, включающим двигатель рулевого колеса, приводит рулевое колесо в движение для вращения на заданные углы в ответ на команды рулевого управления. Способ включает передачу устройством управления транспортным средством команды на устройство управления рулевым колесом для приведения двигателя рулевого колеса устройства управления рулевым колесом в рабочий режим; получение параметров состояния двигателя рулевого колеса и определение того, находится ли устройство управления рулевым колесом в состоянии простоя; управление устройством управления рулевым колесом для вращения на основании команды рулевого управления от устройства управления транспортным средством в ответ на то, что устройство управления рулевым колесом находится в состоянии простоя, в ответ на команду рулевого управления приведение рулевого колеса в движение для вращения на заданный угол с использованием двигателя рулевого колеса, при этом угол поворота рулевого колеса управляется вращением двигателя рулевого колеса. Обеспечивается не только автоматическое корректирование направления, когда имеют место отклонения от запланированного курса, но автоматическое рулевое управление. 3 н. и 13 з.п. ф-лы, 5 ил.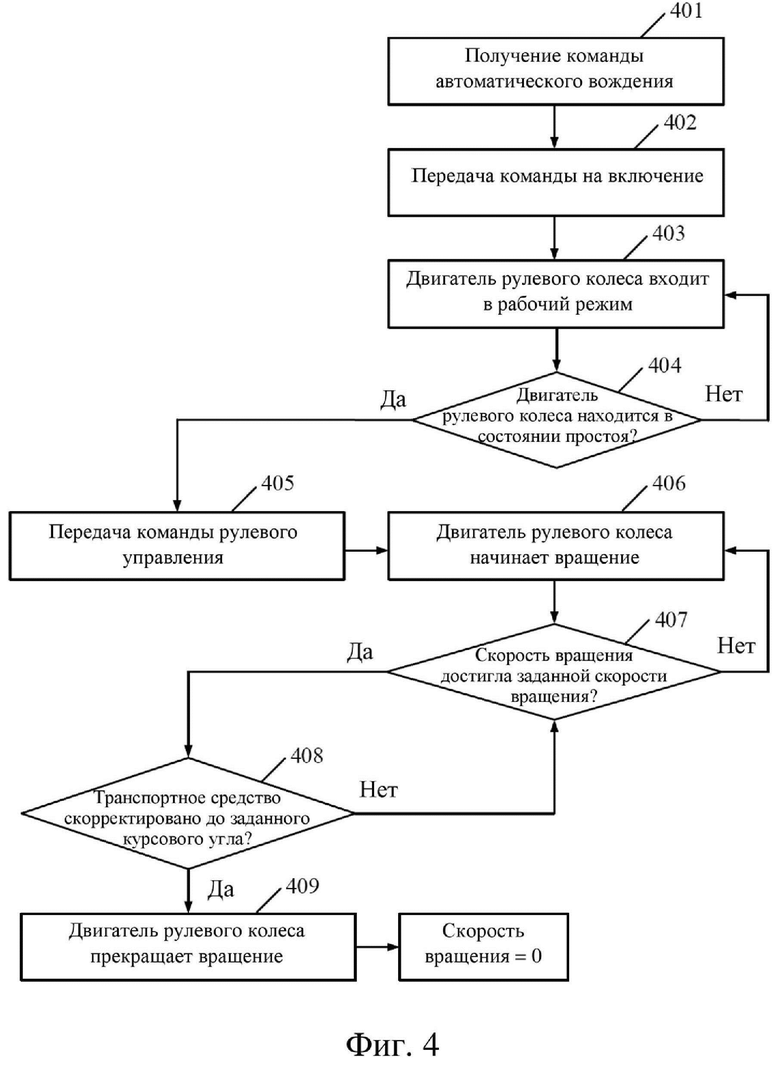
1. Способ управления рулевым управлением для автоматического вождения транспортного средства, включающий:
передачу устройством управления транспортным средством команды на устройство управления рулевым колесом для приведения двигателя рулевого колеса устройства управления рулевым колесом в рабочий режим;
получение параметров состояния двигателя рулевого колеса и определение того, находится ли устройство управления рулевым колесом в состоянии простоя;
управление устройством управления рулевым колесом для вращения на основании команды рулевого управления от устройства управления транспортным средством в ответ на то, что устройство управления рулевым колесом находится в состоянии простоя; и
в ответ на команду рулевого управления приведение рулевого колеса в движение для вращения на заданный угол с использованием двигателя рулевого колеса, при этом угол поворота рулевого колеса управляется вращением двигателя рулевого колеса.
2. Способ управления рулевым управлением по п. 1, отличающийся тем, что дополнительно включает:
передачу команды рулевого управления на устройство управления рулевым колесом, которое содержит двигатель рулевого колеса и рулевое колесо, в ответ на то, что транспортное средство автоматически движется по запланированному пути и отклонение между фактическим путем транспортного средства и запланированным путем превышает заданное значение.
3. Способ управления рулевым управлением по п. 2, отличающийся тем, что дополнительно включает:
управление рулевым колесом для сохранения им текущего положения за счет управления двигателем рулевого колеса для прекращения вращения в ответ на то, что фактический путь скорректирован настолько, что отклонение между фактическим путем и запланированным путем меньше заданного значения.
4. Способ управления рулевым управлением по п. 1, отличающийся тем, что дополнительно включает:
передачу команды рулевого управления на устройство управления транспортным средством в ответ на то, что транспортному средству необходимо развернуться, при этом устройство управления рулевым колесом управляется устройством управления транспортным средством.
5. Способ управления рулевым управлением по п. 4, отличающийся тем, что дополнительно включает:
получение скорости вращения двигателя рулевого колеса;
сравнение скорости вращения двигателя рулевого колеса с заданной скоростью вращения в команде рулевого управления; и
управление двигателем рулевого колеса для увеличения скорости вращения в ответ на то, что скорость вращения двигателя рулевого колеса ниже заданной скорости вращения.
6. Способ управления рулевым управлением по п. 5, отличающийся тем, что дополнительно включает:
корректировку курсового угла транспортного средства до заданного угла и управление двигателем рулевого колеса с помощью устройства управления транспортным средством для прекращения вращения, чтобы остановить вращение рулевого колеса.
7. Способ управления рулевым управлением по п. 1, отличающийся тем, что дополнительно включает:
управление двигателем рулевого колеса для прекращения работы, чтобы управлять переходом транспортного средства в состояние ручного управления рулевым управлением в ответ на то, что управление рулевым колесом осуществляется ручным усилием.
8. Устройство управления рулевым колесом, применяемое для рулевого управления при вождении транспортного средства, содержащее:
рулевое колесо и
двигатель рулевого колеса, при этом:
рулевое колесо соединено с двигателем рулевого колеса и приводится в движение двигателем рулевого колеса,
двигатель рулевого колеса соединен с возможностью управления с устройством управления транспортным средством транспортного средства,
устройство управления транспортным средством выполнено с возможностью передачи команды на устройство управления рулевым колесом для приведения двигателя рулевого колеса устройства управления рулевым колесом в рабочий режим;
устройство управления транспортным средством выполнено с возможностью получения параметров состояния двигателя рулевого колеса и определения того, находится ли устройство управления рулевым колесом в состоянии простоя;
устройство управления рулевым колесом выполнено с возможностью управления рулевым колесом для вращения на основании команды рулевого управления в ответ на то, что устройство управления рулевым колесом находится в состоянии простоя; и
устройство управления транспортным средством выполнено с возможностью передачи команды на двигатель рулевого колеса на основании команды автоматического вождения для управления двигателем рулевого колеса для вращения рулевого колеса на заданный угол, и
угол поворота рулевого колеса управляется вращением двигателя рулевого колеса.
9. Устройство управления рулевым колесом по п. 8, отличающееся тем, что дополнительно содержит:
датчик двигателя рулевого колеса, получающий параметры вращения двигателя рулевого колеса и сообщающийся с устройством управления транспортным средством, при этом команда, передаваемая устройством управления транспортным средством, содержит заданное значение параметра вращения двигателя рулевого колеса.
10. Транспортное средство, содержащее: устройство управления транспортным средством;
устройство управления рулевым колесом, содержащее рулевое колесо и двигатель рулевого колеса; и
запоминающее устройство, соединенное с устройством управления транспортным средством и хранящее команды для выполнения устройством управления транспортным средством, чтобы способствовать устройству управления транспортным средством в:
передаче команды на устройство управления рулевым колесом для приведения двигателя рулевого колеса устройства управления рулевым колесом в рабочий режим;
получении параметров состояния двигателя рулевого колеса и определении, находится ли устройство управления рулевым колесом в состоянии простоя;
управлении устройством управления рулевым колесом для вращения на основании команды рулевого управления от устройства управления транспортным средством в ответ на то, что устройство управления рулевым колесом находится в состоянии простоя;
передаче команды рулевого управления и
приведении рулевого колеса в движение для вращения на заданный угол с использованием двигателя рулевого колеса в ответ на команду рулевого управления, при этом угол поворота рулевого колеса управляется вращением двигателя рулевого колеса.
11. Транспортное средство по п. 10, отличающееся тем, что устройство управления транспортным средством дополнительно способствует:
передаче команды рулевого управления на устройство управления рулевым колесом в ответ на то, что транспортное средство автоматически движется по запланированному пути и отклонение между фактическим путем транспортного средства и запланированным путем превышает заданное значение.
12. Транспортное средство по п. 11, отличающееся тем, что устройство управления транспортным средством дополнительно способствует:
управлению рулевым колесом для сохранения им текущего положения за счет управления двигателем рулевого колеса для прекращения вращения в ответ на то, что фактический путь скорректирован настолько, что отклонение между фактическим путем и запланированным путем меньше заданного значения.
13. Транспортное средство по п. 10, отличающееся тем, что устройство управления транспортным средством дополнительно способствует:
передаче команды рулевого управления на устройство управления транспортным средством в ответ на то, что транспортному средству необходимо развернуться, при этом устройство управления рулевым колесом управляется устройством управления транспортным средством.
14. Транспортное средство по п. 13, отличающееся тем, что устройство управления транспортным средством дополнительно способствует: получению скорости вращения двигателя рулевого колеса;
сравнению скорости вращения двигателя рулевого колеса с заданной скоростью вращения в команде рулевого управления; и
управлению двигателем рулевого колеса для увеличения скорости вращения в ответ на то, что скорость вращения двигателя рулевого колеса ниже заданной скорости вращения.
15. Транспортное средство по п. 14, отличающееся тем, что устройство управления транспортным средством дополнительно способствует:
корректировке курсового угла транспортного средства до заданного угла; и
управлению двигателем рулевого колеса для прекращения вращения, чтобы остановить вращение рулевого колеса.
16. Транспортное средство по п. 10, отличающееся тем, что устройство управления транспортным средством дополнительно способствует:
управлению двигателем рулевого колеса для прекращения работы, чтобы управлять переходом транспортного средства в состояние ручного управления рулевым управлением в ответ на то, что управление рулевым колесом осуществляется ручным усилием.
| US 2016214643 A1, 28.07.2016 | |||
| US 5931253 A, 03.08.1999 | |||
| US 2018148085 A1, 31.05.2018. |

