1. Область техники, к которой относится изобретение
[0001] Изобретение относится к системе поддержки рулевого управления.
2. Описание предшествующего уровня техники
[0002] Известна система поддержки рулевого управления, которая выполняет управление (называемое поддержка управления при смене полосы) по поддержке действий рулевого управления, при этом собственное транспортное средство выполняет смену полосы движения с предыдущей полосы, по которой в данный момент перемещается собственное транспортное средство, на соседнюю полосу. Например, система управления транспортным средством, предложенная в публикации японской заявки №2016-126360 (JP 2016-126360 А), выполнена с возможностью наблюдения за периферией собственного транспортного средства, и определения, имеется ли другое транспортное средство, которое препятствует поддержке управления при смене полосы движения, а также не разрешения запуска поддержки управления при смене полосы движения в ситуации, когда в качестве препятствия присутствует другое транспортное средство.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Однако, даже когда поддержка управления при смене полосы движения разрешена, и она запускается на основе контроля периферии, может возникнуть ситуация, когда после этого другое транспортное средство аварийно сближается с собственным транспортным средством. Как показано на фиг. 16, примеры такой ситуации включают в себя ситуацию, когда другое транспортное средство С2 на скорости приближается к собственному транспортному средству C1 сзади по соседней полосе, являющейся целевой для смены полосы (называемой целевой полосой) с неожидаемой относительной скоростью, а также ситуацию, когда другое транспортное средство С3 въезжает на целевую полосу с полосы, которая является следующей смежной к целевой полосе (полосе, которая находится в двух полосах от предыдущей полосы) и аварийно сближается с собственным транспортным средством С1. В системе, предложенной в JP 2016-126360 А, ситуация, когда другое транспортное средство аварийно сближается с собственным транспортным средством после того, как запущена поддержка управления при смене полосы движения, не рассматривается, так что с такой ситуацией невозможно справиться.
[0004] Например, поддержка управления при смене полосы движения может быть остановлена в случае обнаружения того, что другое транспортное средство аварийно сближается с собственным транспортным средством во время поддержки управления при смене полосы движения. Тем не менее, при простой остановке поддержки управления при смене полосы движения, есть предпосылки для улучшения удобства и безопасности.
[0005] Изобретением предложена система поддержки рулевого управления, обеспечивающая удобство и безопасность.
[0006] Объектом изобретения является система поддержки рулевого управления. Система поддержки рулевого управления в соответствии с объектом содержит: блок контроля периферии, выполненный с возможностью контроля периферии собственного транспортного средства; блок распознавания полосы движения, выполненный с возможностью распознавания полосы и получения информации о полосе движения, включая относительное положение собственного транспортного средства относительно полосы; блок поддержки управления при смене полосы движения, выполненный с возможностью запуска поддержки управления при смене полосы в ответ на запрос поддержки при смене полосы движения, в случае, когда блок контроля периферии не определяет другое транспортное средство, препятствующее смене полосы движения, выполняемой собственным транспортным средством, при этом поддержка управления при смене полосы движения, регулирующая рулевое управление таким образом, что собственное транспортное средство выполняет смену полосы от предыдущей полосы до целевой полосы на основе информации о полосе движения, причем предыдущая полоса представляет собой полосу, по которой в настоящее время перемещается собственное транспортное средство, а целевая полоса представляет собой полосу, смежную к предыдущей полосе; блок определения состояния выполнения, выполненный с возможностью определения состояния выполнения смены полосы посредством поддержки управления при смене полосы движения в текущий момент времени; блок остановки поддержки смены полосы движения, выполненный с возможностью досрочной остановки поддержки управления при смене полосы движения, когда блок поддержки периферии определяет приближающееся транспортное средство, при этом приближающееся транспортное средство может с вероятностью аварийно приблизиться к собственному транспортному средству в случае, когда поддержка управления при смене полосы движения продолжается; блок поддержки управления возвратом по центру, выполненный с возможностью выполнения поддержки управления возвратом по центру, в случае, когда состояние выполнения, определенное блоком определения состояния выполнения, когда обнаружено приближающееся транспортное средство, и поддержка управления при смене полосы движения досрочно остановлена, является первой частью смены полосы движения, при этом поддержка управления возвратом по центру регулирует рулевое управление, таким образом, что собственное транспортное средство перемещается в центральное положение предыдущей полосы в направлении ширины предыдущей полосы; и блок поддержки управления предотвращением столкновения, выполненный с возможностью выполнения поддержки управления предотвращением столкновения, в случае, когда состояние выполнения, определенное блоком определения состояния выполнения, когда обнаружено приближающееся транспортное средство, и поддержка управления при смене полосы движения досрочно остановлена, является второй частью смены полосы; при этом поддержка управления предотвращением столкновений регулирующего ориентацию собственного транспортного средства таким образом, что угол отклонения от курса уменьшается с чрезвычайной скоростью, причем угол отклонения от курса является углом между направлением, в котором проходит полоса движения, и направлением ориентации собственного транспортного средства, притом чрезвычайная скорость выше скорости, при которой угол отклонения от курса изменяется посредством поддержки управления возвратом по центру.
[0007] Согласно вышеприведенной конфигурации, можно получить взаимное положение собственного транспортного средства относительно полосы за счет распознавания полосы движения. Кроме того, собственное транспортное средство может выполнить смену полосы движения на целевую полосу, не требуя действий руля водителем. Даже когда поддержка управления при смене полосы движения разрешена и запускается на основе контроля периферии, возможна ситуация, когда другое транспортное средство после этого аварийно сближается с собственным транспортным средством. В соответствии с вышеуказанной конфигурацией, можно обеспечить безопасность и, кроме того, переместить собственное транспортное средство в предпочтительное положение для водителя (центральное положение предыдущей полосы). Кроме того, можно быстро предотвратить перемещение собственного транспортного средства в сторону середины по ширине целевой полосы, и можно помочь избежать столкновения с приближающимся транспортным средством (помочь уменьшить вероятность столкновения). В результате, можно повысить удобство и безопасность.
[0008] Согласно объекту изобретения, система поддержки рулевого управления может дополнительно содержать блок поддержки управления отслеживания полосы, выполненный с возможностью выполнения поддержки управления отслеживания полосы, при этом поддержка управления отслеживания полосы регулирует рулевое управление так, что положение перемещения собственного транспортного средства удерживается в правильном положении в направлении ширины полосы на полосе на основе информации о полосе, при этом блок поддержки управления при смене полосы может быть выполнен с возможностью остановки поддержки управления отслеживания полосы и запуска поддержки управления при смене полосы, в случае, когда получен запрос на поддержку при смене полосы движения, в то время как выполняется поддержка управления отслеживания полосы движения, И блок поддержки управления предотвращением столкновения может быть выполнен тс возможностью регулирования рулевого управления так, чтобы угол отклонения от курса, увеличиваемый за счет поддержки управления при смене полосы движения, возвращался к предыдущему углу отклонения от курса непосредственно перед запуском поддержки управления при смене полосы движения.
[0009] В соответствии с приведенной выше конфигурацией, можно быстро уменьшить поперечную скорость, которая представляет собой скорость собственного транспортного средства, в направлении ширины полосы. Таким образом, можно быстро предотвратить перемещение собственного транспортного средства в сторону середины по ширине целевой траектории.
[0010] Согласно объекту изобретения, блок поддержки управления при смене полосы может быть выполнен с возможностью вычисления первой целевой регулируемой переменной в заранее заданном вычислительном цикле, причем первая целевая регулируемая переменная включает в себя прогнозируемую регулируемую переменную, в которой используется целевая кривизна траектории, в которой собственное транспортное средство выполняет смену полосы движения, осуществления рулевого управления на основе первой целевой регулируемой переменной, а блок поддержки управления предотвращением столкновения может быть выполнен с возможностью вычисления значения, соответствующего интегрированному значению целевой кривизны, с запуска поддержки управления при смене полосы движения до начала поддержки управления предотвращением столкновения, вычисления второй целевой регулируемой переменной на основе значения, соответствующего интегрированному значению, и регулирования рулевого управления на основе второй целевой регулируемой переменной во время выполнения поддержки управления предотвращением столкновения.
[0011] Согласно вышеуказанной конфигурации, можно быстро уменьшить поперечную скорость, которая является скоростью собственного транспортного средства в направлении ширины полосы.
[0012] Согласно объекту изобретения, система поддержки рулевого управления может дополнительно содержать блок поддержки управления возвратом на предыдущую полосу, выполненный с возможностью выполнения поддержки управления возвратом на предыдущую полосу после завершения поддержки управления предотвращением столкновений, причем поддержка управления возвратом на предыдущую полосу регулирует рулевое управление, таким образом, что собственное транспортное средство перемещается в центральное положение предыдущей полосы в направлении ширины полосы предыдущей полосы.
[0013] Согласно вышеуказанной конфигурации, рулевое управление регулируется таким образом, что собственное транспортное средство возвращается в центральное положение предыдущей полосы в направлении ширины предыдущей полосы. Соответственно, можно вернуть собственное транспортное средство в положение (центральное положение предыдущей полосы), которое является более безопасным, и это предпочтительнее для водителя.
[0014] Согласно объекту изобретения, блок определения состояния выполнения может быть выполнен с возможностью определения того, является ли состояние выполнения смены полосы с помощью поддержки управления при смене полосы в текущий момент времени первой частью смены полосы или второй частью смены полосы, и определения того, что состояние выполнения является первой частью смены полосы в случае, когда произведена оценка, что собственное транспортное средство находится на предыдущей полосе, и определения того, что состояние выполнения является второй частью смены полосы в случае, когда произведена оценка, что, по меньшей мере, часть собственного транспортного средства находится на целевой стороне.
[0015] В соответствии с вышеуказанной конфигурацией, можно правильно определить, является ли состояние выполнения первой частью смены полосы или второй частью смены полосы.
[0016] Согласно объекту изобретения, блок определения состояния выполнения может быть выполнен с возможностью определения того, является ли состояние выполнения смены полосы посредством поддержки управления при смене полосы в текущий момент времени первой частью смены полосы или второй частью смены полосы, и определения того, что состояние выполнения является первой частью смены полосы в случае, когда произведена оценка, что собственное транспортное средство находится в первой области, которая находится на противоположной стороне положения определения от целевой полосы в направлении смены полосы движения, и определения того, что состояние выполнения является второй частью смены полосы в случае, когда считается, что собственное транспортное средство находится во второй области, которая находится на противоположной стороне положения определения от первой области в направлении смены полосы движения. Положение определения может являться конкретным положением, расположенным между центральным положением предыдущей полосы в направлении ширины полосы предыдущей полосы, и границей, причем упомянутая граница находится между предыдущей полосой и целевой полосой.
[0017] В соответствии с вышеуказанной конфигурацией, можно предотвратить нахождение части собственного транспортного средства на целевой полосе в том случае, когда выполняется поддержка управления возвратом по центру. Соответственно, возможно более точное определение первой части и второй части смены полосы.
[0018] Согласно объекту изобретения, блок определения состояния выполнения может быть выполнен с возможностью устанавливать положение определения таким образом, что расстояние между границей и положением определения больше при возрастании скорости собственного транспортного средства в направлении ширины полосы.
[0019] В соответствии с приведенной выше конфигурацией, возможно выполнение более точного определения первой части и второй части смены полосы.
[0020] Согласно объекту изобретения, блок контроля периферии может быть выполнен с возможностью определения того, что обнаружено приближающееся транспортное средство, когда степень приближения другого транспортного средства к собственному транспортному средству превышает пороговое значение, и указанное пороговое значение может быть установлено на значение, соответствующее более высокой степени приближения во второй части смены полосы, чем в первой части смены полосы.
[0021] В качестве степени приближения, например, может использоваться прогнозное значение (прогнозное время) от текущего момента времени до столкновения между собственным транспортным средством и другим транспортным средством. Пороговое значение может быть установлено на значение, соответствующее более высокой степени приближения во второй части смены полосы, чем в первой части смены полосы. Поэтому в соответствии с приведенной выше конфигурацией, в первой части смены полосы можно завершить поддержку управления при смене полосы с достаточным временем в состоянии, в котором безопасность обеспечена в достаточной степени, в случае обнаружения приближающегося транспортного средства, которое может с вероятностью аварийно приблизиться к собственному транспортному средству. С другой стороны, во второй части смены полосы движения можно предотвратить выполнение поддержки управления предотвращением столкновений, что более чем необходимо. То есть во второй части смены полосы движения можно предотвратить досрочную остановку поддержки управления при смене полосы движения, что более чем необходимо, и можно повысить удобство.
[0022] Компоненты изобретения не ограничены вариантами осуществления, обозначенными ссылочными позициями.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0023] Признаки, преимущества, а также техническая и промышленная значимость примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на прилагаемые чертежи, на которых одинаковые ссылочные позиции обозначают одинаковые элементы, и где:
Фиг. 1 представляет собой блок-схему системы поддержки рулевого управления в соответствии с вариантом осуществления изобретения;
Фиг. 2 представляет собой вид в плане, показывающий положения крепления датчика периферии и датчика камеры;
Фиг. 3 представляет собой схему для описания информации о транспортном средстве, относящейся к полосе движения;
Фиг. 4 представляет собой схему для описания работы рычага управления световым сигналом;
Фиг. 5 представляет собой блок-схему, показывающую процедуру поддержки рулевого управления;
Фиг. 6 представляет собой блок-схему, показывающую процедуру управления отменой LCA;
Фиг. 7 представляет собой блок-схему, показывающую процедуру LCA управления предупреждением о приближении;
Фиг. 8 представляет собой схему, показывающую экран LTA и экран LCA на устройстве отображения;
Фиг. 9 представляет собой схему, показывающую целевую траекторию;
Фиг. 10 представляет собой схему, показывающую функцию целевой траектории;
Фиг. 11 показывает экран отмены LCA на устройстве отображения;
Фиг. 12 показывает диаграмму целевой кривизны;
Фиг. 13 показывает экран предупреждения LCA о приближении на устройстве отображения;
Фиг. 14 представляет собой схему, показывающую целевую траекторию и целевую траекторию возврата по центру;
Фиг. 15 представляет собой схему, показывающую целевую траекторию и целевую траекторию возврата на предыдущую полосу;
Фиг. 16 представляет собой схему, показывающую ситуацию приближения собственного транспортного средства и другого транспортного средства; и
Фиг. 17 представляет собой блок-схему, показывающую процедуру поддержки рулевого управления в соответствии с модификацией.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0024] Далее будет описана система поддержки рулевого управления в соответствии с вариантом осуществления изобретения со ссылкой на чертежи.
[0025] Система поддержки рулевого управления в соответствии с вариантом осуществления изобретения применяется на транспортном средстве (далее также именуется «собственным транспортным средством» для отличия от другого транспортного средства). Как показано на фиг. 1, система вспомогательного управления включает в себя ЭБУ 10 поддержки вождения, ЭБУ 20 электрического привода руля, ЭБУ 30 измерителя, ЭБУ 40 рулевого управления, ЭБУ 50 двигателя, ЭБУ 60 тормоза и ЭБУ 70 навигации.
[0026] Эти ЭБУ представляют собой электрические блоки управления, каждый из которых включает в себя микрокомпьютер в качестве основной части, и они соединены друг с другом через локальную сеть 100 контроллеров (ЛКС), что обеспечивает взаимную отправку и получение информации. В настоящем описании микрокомпьютер включает в себя ЦП, ПЗУ, ОЗУ, энергонезависимую память, интерфейс I/F и тому подобное. ЦП реализует различные функции, выполняя команды (процедуры или последовательности), хранящиеся в ПЗУ. Некоторые или все ЭБУ могут быть интегрированы в единый ЭБУ.
[0027] ЛКС 100 соединена с несколькими видами датчиков 80 состояния транспортного средства, которые определяют состояние транспортного средства, и несколькими видами датчиков 90 состояния работы привода, которые определяют состояние работы привода. Датчики 80 состояния транспортного средства включают в себя датчик скорости, который определяет скорость движения транспортного средства, датчик G продольного ускорения, который определяет ускорение транспортного средства в продольном направлении, датчик G поперечного ускорения, который определяет ускорение транспортного средства в поперечном направлении, датчик скорости углового смещения, который определяет скорость углового смещения транспортного средства, и тому подобное.
[0028] Датчики 90 состояния работы привода включают в себя датчик степени воздействия акселератора, который определяет величину хода педали акселератора, датчик степени воздействия тормоза, который определяет степень воздействия педали тормоза, переключатель тормоза, который определяет, была ли задействована педаль тормоза, датчик угла поворота руля, который определяет угол поворота руля, датчик крутящего момента рулевого механизма, который определяет крутящий момент рулевого управления, датчик положения переключения, который определяет положение переключения коробки передач, и тому подобное.
[0029] Информация (называемая информацией датчика), зарегистрированная датчиками 80 состояния транспортного средства и датчиками 90 состояния работы привода, отправляется в ЛКС 100. Каждый ЭБУ может использовать информацию датчика, отправленную на ЛКС 100, когда это необходимо. В некоторых случаях информация датчика представляет собой информацию от датчика, подключенного к конкретному ЭБУ, и отправляется от конкретного ЭБУ на ЛКС 100. Например, датчик степени воздействия акселератора может быть соединен с ЭБУ 50 двигателя. В этом случае информация датчика, указывающая степень воздействия акселератора, отправляется из ЭБУ 50 двигателя на ЛКС 100. Например, датчик угла поворота руля может быть подключен к ЭБУ 40 рулевого управления. В этом случае информация датчика, обозначающая угол поворота руля, отправляется из ЭБУ 40 рулевого управления на ЛКС 100. То же самое относится к другим датчикам. Допускается использование конфигурации, в которой обмен информацией датчика осуществляется с помощью прямой связи между конкретными ЭБУ без ЛКС 100.
[0030] ЭБУ 10 поддержки вождения представляет собой устройство управления, которое выполняет преимущественно поддержку вождения для водителя и выполняет поддержку управления при смене полосы движения, поддержку управления отслеживания полосы движения и адаптивный круиз-контроль. Как показано на фиг. 2, ЭБУ 10 поддержки вождения соединен с датчиком 11FC центральной передней периферии, датчиком 11FR правой передней периферии, датчиком 11FL левой передней периферии, датчиком 11RR правой задней периферии и датчиком 11RL левой задней периферии. Периферийные датчики 11FC, 11FR, 11FL, 11RR, 11RL, которые являются радиолокационными датчиками, отличаются друг от друга только областью распознавания и в основном имеют одинаковую конфигурацию друг с другом. В дальнейшем каждый из периферийных датчиков 11FC, 11FR, 11FL, 11RR, 11RL называется периферийным датчиком 11, когда нет необходимости их индивидуально различать.
[0031] Датчик 11 периферии включает в себя радиолокационный блок приема-передачи и блок обработки сигналов (не показан). Радиолокационный блок приема-передачи излучает электрическую волну с миллиметровым диапазоном волн (далее именуемую «миллиметровой волной») и принимает миллиметровую волну (отраженную волну), отраженную трехмерным объектом (например, другим транспортным средством, пешеходом, велосипедом и зданием), который присутствует в области распространения излучения. Блок обработки сигналов получает информацию (далее именуемую информацией о периферии), указывающую расстояние между собственным транспортным средством и трехмерным объектом, относительную скорость между собственным транспортным средством и трехмерным объектом, относительное положение (направление) трехмерного объекта к собственному транспортному средству и т.п., основанную на разности фаз между переданной миллиметровой волной и принятой отраженной волной, уровне затухания отраженной волны, временем от направления миллиметровой волны до получения отраженной волны и тому подобное, и передает информацию на ЭБУ 10 поддержки вождения при каждом истечении заранее заданного времени. Из информации о периферии можно определить продольно направленную составляющую и поперечно направленную составляющую расстояния между собственным транспортным средством и трехмерным объектом, и продольно направленную составляющую и поперечно направленную составляющую относительной скорости между собственным транспортным средством и трехмерным объектом.
[0032] Как показано на фиг. 2, датчик 11FC центральной передней периферии, который размещен на центральном участке передней части кузова транспортного средства, определяет трехмерный объект, который присутствует в передней области от собственного транспортного средства. Датчик 11FR правой передней периферии, который размещен в правом переднем угловом участке кузова транспортного средства, определяет в основном трехмерный объект, который присутствует в правой передней области от собственного транспортного средства. Датчик 11FL левой передней периферии, который размещен в левом переднем угловом участке кузова транспортного средства, определяет в основном трехмерный объект, который присутствует в левой передней области от собственного транспортного средства. Датчик 11RR правой задней периферии, который размещен в правом заднем угловом участке кузова транспортного средства, определяет в основном трехмерный объект, который присутствует в правой задней области от собственного транспортного средства. Датчик 11RL левой задней периферии, который размещен в левом заднем угловом участке кузова транспортного средства, определяет в основном трехмерный объект, который присутствует в левой задней области от собственного транспортного средства.
[0033] В варианте осуществления датчик 11 периферии является радиолокационным датчиком, но вместо радиолокационного датчика может использоваться другой датчик, например, такой как парктроник и лазерный локатор (LIDAR).
[0034] Кроме того, ЭБУ 10 поддержки вождения соединен с датчиком 12 камеры. Датчик 12 камеры включает в себя блок камеры и блок распознавания полосы, который анализирует данные изображения, сфотографированные и полученные блоком камеры, и распознает белую линию на дороге. Датчик 12 камеры (блок камеры) фотографирует вид впереди собственного автомобиля. Датчик 12 камеры (блок распознавания полосы) периодически передает информацию о распознаваемой белой линии в ЭБУ 10 поддержки вождения с заранее заданным вычислительным циклом.
[0035] Датчик 12 камеры может распознавать полосу, показывающую область, разграниченную белыми линиями, и может определять взаимное расположение собственного транспортного средства относительно полосы на основе взаимного расположения белых линий и собственного транспортного средства. Полоса представляет собой область, которая, например, разграничена белыми линиями. Положение собственного транспортного средства является положением центра тяжести собственного транспортного средства. Кроме того, поперечное положение собственного транспортного средства, описанное ниже, подразумевает положение центра тяжести собственного транспортного средства в направлении ширины полосы, поперечная скорость собственного транспортного средства подразумевает скорость центра тяжести собственного транспортного средства в направлении ширины полосы, и поперечное ускорение собственного транспортного средства подразумевает ускорение центра тяжести собственного транспортного средства в направлении ширины полосы. Они могут быть оценены по взаимному расположению собственного транспортного средства относительно белых линий, определенных датчиком 12 камеры. В варианте осуществления положение собственного транспортного средства является местоположением центра тяжести, но не обязательно ограничивается положением центра тяжести, а может быть использовано заранее заданное конкретное положение (например, центральное положение на плоском виде).
[0036] Как показано на фиг. 3, датчик 12 камеры определяет центральную линию CL полосы в положении середины по ширине между правой и левой белыми линиями WL для полосы, по которой перемещается собственное транспортное средство. Центральная линия CL полосы используется в качестве целевой линии движения при поддержке управления отслеживания полосы движения, описываемой ниже. Кроме того, датчик 12 камеры вычисляет кривизну Cu изгиба центральной линии CL полосы.
[0037] Датчик 12 камеры вычисляет положение и ориентацию собственного транспортного средства на полосе, разграниченной правой и левой белыми линиями WL. Например, как показано на фиг. 3, датчик 12 камеры вычисляет расстояние Dy (m) в направлении ширины полосы между точкой Р центра тяжести собственного транспортного средства С и центральной линией CL полосы, то есть расстояние Dy, на которое собственное транспортное средство С отклоняется от центральной линии CL полосы в направлении ширины полосы. Расстояние Dy называется боковым отклонением Dy. Кроме того, датчик 12 камеры вычисляет угол между направлением центральной линии CL полосы и направлением ориентации собственного транспортного средства С, то есть угол θу (рад), на который направление ориентации собственного транспортного средства С отклоняется по горизонтали от направления центральной линии CL полосы. Угол θу называется углом θу отклонения от курса. В случае, когда полоса изогнута, центральная линия CL полосы также изогнута. Угол θу отклонения от курса означает угол, на который направление ориентации собственного транспортного средства С отклоняется от изогнутой центральной линии CL полосы. Кроме того, центральная линия CL полосы расположена вдоль направления, в котором пролегает полоса. В дальнейшем информация (Cu, Dy, θу), обозначающая кривизну Cu, боковое отклонение Dy и угол θу отклонения от курса, именуется информацией о транспортном средстве, относящейся к полосе. Что касается бокового отклонения Dy и угла θу отклонения от курса, то направление вправо или влево относительно центральной линии CL полосы обозначено знаками (положительным или отрицательным). Что касается кривизны Cu, то изогнутое направление (направление вправо или влево) обозначается знаком (положительным или отрицательным).
[0038] Не только для полосы собственного транспортного средства, но и смежной полосы, датчик 12 камеры с заранее заданным вычислительным циклом передает на ЭБУ 10 поддержки вождения информацию о белых линиях, в каком в виде (сплошной линии, пунктирной линии) нанесена распознанная белая линия, расстояние (ширина полосы) между правой и левой белыми линиями, смежными друг с другом, форме белой линии. В случае, когда белая линия является сплошной линией, транспортному средству запрещено выполнять смену полосы с пересечением белой линии. С другой стороны, в случае, когда белая линия является прерывистой (белая линия формируется прерывистой с постоянным интервалом), транспортному средству разрешается выполнять смену полосы с пересечением белой линии. Информация о транспортном средстве, относящаяся к полосе движения (Cu, Dy, θу) и информация о белой линии, в совокупности именуется информацией о полосе.
[0039] В варианте осуществления датчик 12 камеры вычисляет информацию о транспортном средстве, относящуюся к полосе движения (Cu, Dy, θу), однако вместо этого ЭБУ 10 вспомогательного привода может анализировать данные изображения, выводимые датчиком 12 камеры, и может получать информацию о полосе.
[0040] Датчик 12 камеры может определять трехмерный объект, который присутствует впереди собственного транспортного средства, на основе данных изображения, и, соответственно, может получать информацию о передней периферии посредством вычисления в дополнение к информации о полосе. В этом случае, например, система поддержки рулевого управления может быть снабжена блоком синтезированной обработки (не показан), который синтезирует информацию о периферии, полученную датчиком 11FC центральной передней периферии, датчиком правой передней периферии 11FR и датчиком левой передней периферии 11FL и информацию о периферии, полученную датчиком 12 камеры, и формирует информацию о передней периферии с высокой точностью определения и может передавать информацию о передней периферии, формируемую модулем синтезированной обработки, на ЭБУ 10 поддержки вождения, в качестве информации о передней периферии собственного транспортного средства.
[0041] Как показано на фиг. 1, ЭБУ 10 поддержки вождения соединен с устройством 13 звуковой сигнализации. Устройство 13 звуковой сигнализации издает сигнал при приеме имеющего отношение к устройству звуковой сигнализации сигнала от ЭБУ 10 поддержки вождения. Например, в случае, когда ЭБУ 10 поддержки вождения информирует водителя о статусе поддержки вождения или привлекает внимание водителя, ЭБУ 10 поддержки вождения заставляет устройство 13 звуковой сигнализации издавать звук.
[0042] В варианте осуществления устройство 13 звуковой сигнализации соединено с ЭБУ 10 поддержки вождения, однако может быть подключено и к другому ЭБУ, например, ЭБУ уведомления (не показан), который служит только для уведомления, и может быть выполнен с возможностью звукового оповещения посредством ЭБУ уведомления. В этом случае ЭБУ 10 поддержки вождения посылает команду управления звуковым сигналом на ЭБУ уведомления.
[0043] Вместо или в дополнение к устройству 13 звуковой сигнализации может быть предусмотрен вибратор, который вызывает вибрацию для привлечения внимания водителя. Например, вибратор установлен на рулевом колесе и привлекает внимание водителя, вызывая вибрацию рулевого колеса.
[0044] ЭБУ 10 поддержки вождения выполняет поддержку управления при смене полосы движения, поддержку управления отслеживания полосы и адаптивным круиз-контролем на основе информации о периферии, передаваемой датчиком 11 периферии, информации о полосе, полученной на основе распознавания белой линии датчиком 12 камеры, состояния транспортного средства, определенного датчиками 80 состояния транспортного средства, состояния работы привода, определенного датчиком 90 состояния работы привода, и тому подобное.
[0045] ЭБУ 10 поддержки вождения соединен с устройством 14 настроек управления, которое управляется водителем. Устройство 14 настроек управления является устройством управления для индивидуальной установки того, следует ли выполнять поддержку управления при смене полосы движения, выполнять ли поддержку управления отслеживания полосы, выполнять ли адаптивный круиз-контроль и тому подобное. ЭБУ 10 поддержки вождения определяет, следует ли выполнять элементы управления, вводя сигналы установок в устройство 14 настроек управления. В этом случае, когда выполнение адаптивного круиз-контроля не выбрано, выполняется автоматическая установка таким образом, что поддержка управления при смене полосы движения и поддержка управления отслеживания полосы также не выполняются. Кроме того, когда выполнение поддержки управления отслеживания полосы не выбрано, выполняется автоматическая установка таким образом, что поддержка управления при смене полосы движения не выполняется.
[0046] Устройство 14 настроек управления имеет функцию ввода параметра, указывающего на наклонности водителя и тому подобное, при выполнении вышеуказанных элементов управления.
[0047] ЭБУ 20 электрического привода руля является устройством управления для устройства электрического привода руля. В дальнейшем ЭБУ 20 электрического привода руля именуется ЭБУ 20 ЭПР. ЭБУ 20 ЭПР подключен к приводу 21 электродвигателя. Привод 21 электродвигателя соединен с электродвигателем 22 рулевого управления. Электродвигатель 22 рулевого управления включен в непоказанный «рулевой механизм, включающий в себя рулевое колесо, вал рулевого управления, связанный с рулевым колесом, механизм рулевого управления и пр.» транспортного средства. ЭБУ 20 ЭПР определяет крутящий момент рулевого управления, приложенный водителем к рулевому колесу (не показан) с помощью датчика крутящего момента, установленного на валу рулевого управления, и управляет задействованием привода 21 электродвигателя на основе крутящего момента рулевого управления для приведения в действие электродвигателя 22 рулевого управления. С помощью привода вспомогательного электродвигателя, момент рулевого управления передается на рулевой механизм, и рулевое управление водителем получает вспомогательное усилие.
[0048] Когда ЭБУ 20 ЭПР получает команду рулевого управления от ЭБУ 10 поддержки вождения через ЛКС 100, ЭБУ 20 ЭПР приводит в действие двигатель 22 рулевого управления с регулируемой переменной, заданной командой управления, и генерирует момент рулевого управления. Момент рулевого управления означает крутящий момент, который передается механизму рулевого управления посредством команды управления из ЭБУ 10 поддержки вождения, что не требует действий рулевого управления водителем (действий рулевым колесом), в отличие от вспомогательного момента рулевого управления, который служит водителю для облегчения действий рулевого управления.
[0049] В случае, когда определяется момент рулевого управления, выполняемого водителем с помощью рулевого колеса, и при этом момент рулевого управления выше, чем пороговое значение, ЭБУ 20 ЭПР обеспечивает приоритет действиям водителя рулевым колесом и создает вспомогательный момент рулевого управления для облегчения действий рулевым колесом, даже когда ЭБУ 20 ЭПР получает команду управления от ЭБУ 10 поддержки вождения.
[0050] ЭБУ 30 измерителя соединен с устройством 31 отображения, а также с правым и левым мигающими световыми сигналами 32 (каждый из которых подразумевает лампу указателя поворота, а также обозначается, как лампа поворота). Устройство 31 отображения представляет собой, например, мульти-информационный дисплей, который размещен перед сиденьем водителя, и отображает разнообразную информацию в дополнение к измеренным значениям счетчиков, как например, скорость транспортного средства. Например, когда ЭБУ 30 измерителя получает команду дисплея, соответствующую режиму поддержки вождения от ЭБУ 10 поддержки вождения, ЭБУ 30 измерителя отображает экран, обозначенный командой дисплея, на устройстве 31 отображения. В качестве устройства 31 отображения может использоваться дисплей на ветровом стекле (не показан), вместо или в дополнение к мульти-информационному дисплею. В случае, когда используется устройство отображения с индикацией на ветровом стекле, может быть предусмотрен специальный ЭБУ, который управляет отображением на устройстве отображения с индикацией на ветровом стекле.
[0051] ЭБУ 30 измерителя включает в себя схему привода мигающих световых сигналов (не показано). Когда ЭБУ 30 измерителя получает команду на включение мигающих световых сигналов через ЛКС 100, ЭБУ 30 измерителя включает мигающий световой сигнал 32 для направления (направо или налево), указанной командой включения мигающих световых сигналов. Когда ЭБУ 30 измерителя включает мигающий световой сигнал 32, ЭБУ 30 измерителя посылает на ЛКС 100 информацию о мигании светового сигнала, указывающую, что мигающий световой сигнал 32 мигает. Соответственно, другие ЭБУ могут знать, что мигающий световой сигнал 32 включен.
[0052] ЭБУ 40 рулевого управления соединен с рычагом 41 управления мигающим световым сигналом. Рычаг 41 управления мигающим световым сигналом является устройством управления для приведения в действие (мигания) мигающего светового сигнала 32 и размещен на рулевой колонке. Рычаг 41 управления мигающим световым сигналом размещен таким образом, чтобы иметь возможность поворачиваться вокруг шпинделя с двухпозиционным ходом, как в левом, так и в правом направлении поворота.
[0053] Рычаг 41 управления мигающим световым сигналом в варианте осуществления используется также как устройство управления, через которое водитель запрашивает поддержку управления при смене полосы движения. Как показано на фиг. 4, рычаг 41 управления мигающим световым сигналом выполнен таким образом, что он может избирательно переключаться в первое положение P1L (P1R) хода, которое является положением, когда рычаг 41 управления мигающим световым сигналом поворачивается из нейтрального положения PN на первый угол θW1 и второе положение P2L (P2R) хода, которое является положением, когда рычаг 41 управления мигающим световым сигналом поворачивается из нейтрального положения PN на второй угол θW2 (>θW1), в каждом из направлений поворота влево и из направлений поворота вправо вокруг шпинделя О. В случае, когда рычаг 41 управления мигающим световым сигналом перемещается в первое положение P1L (P1R) хода за счет действия водителя рычагом, рычаг 41 управления мигающим световым сигналом возвращается в нейтральное положение PN, когда усилие воздействия на рычаг водителем прекращено. В случае, когда рычаг 41 управления мигающим световым сигналом перемещается во второе положение P2L (P2R) хода за счет действия водителя рычагом, рычаг 41 управления мигающим световым сигналом удерживается во втором положении P2L (P2R) хода с помощью механизма блокировки, даже когда усилие воздействия на рычаг водителем прекращено. В случае, когда рычаг 41 управления мигающим световым сигналом возвращается в нейтральное положение за счет обратного вращения рулевого колеса в состоянии, когда рычаг 41 управления мигающим световым сигналом удерживается во втором положении P2L (P2R) хода или в том случае, когда водитель выполняет действие по возврату рычага 41 управления мигающим световым сигналом в нейтральное положении, фиксация посредством механизма блокировки освобождается так, что рычаг 41 управления мигающим световым сигналом возвращается в нейтральное положение PN.
[0054] Рычаг 41 управления мигающим световым сигналом включает в себя первый переключатель 411L (411R), который включается (что генерирует сигнал включения), только когда положение рычага 41 управления мигающим световым сигналом является первым положением P1L (P1R) хода, и второй переключатель 412L (412R), который включается (что генерирует сигнал включения) только в том случае, когда положение рычага 41 управления мигающим световым сигналом является вторым положением P2L (P2R) хода.
[0055] ЭБУ 40 рулевого управления определяет рабочее положение рычага 41 управления мигающим световым сигналом на основе сигналов от первого переключателя 411L (411R) и второго переключателя 412L (412R). В каждом из случаев, когда рычаг 41 управления мигающим световым сигналом помещен в первое положение P1L (P1R) хода, и в случае, когда рычаг 41 управления мигающим световым сигналом переведен во второе положение P2L (P2R) хода, ЭБУ 40 рулевого управления посылает на ЭБУ 30 измерителя команду на включение мигающих световых сигналов, включая информацию, которая указывает направление действий (направо или налево).
[0056] В случае, когда ЭБУ 40 рулевого управления определяет, что рычаг 41 управления мигающим световым сигналом постоянно удерживается в первом положении P1L (P1R) хода сверх заранее заданного времени установки (времени принятия решения по запросу на смену полосы движения, например, 1 секунду), ЭБУ 40 рулевого управления выводит сигнал запроса на поддержку при смене полосы движения, включающий в себя информацию, которая указывает на направление действий (направо или налево), на ЭБУ 10 поддержки вождения. Соответственно, в случае, когда водитель хочет поддержку при смене полосы во время движения, водителю необходимо только поместить рычаг 41 управления мигающим световым сигналом в первое положение P1L (P1R) хода для направления смены полосы движения, и сохранить это положение сверх времени установки. Эта действие называется как запрос действий поддержки при смене полосы движения.
[0057] В этом варианте осуществления рычаг 41 управления мигающим световым сигналом используется в качестве устройства управления, посредством которого водитель запрашивает поддержку при смене полосы движения, однако на рулевом колесе или подобном устройстве может быть размещено специальное устройство для запроса на поддержку при смене полосы движения вместо рычага 41 управления мигающим световым сигналом.
[0058] ЭБУ 50 двигателя, показанный на фиг. 1, соединен с приводом 51 двигателя. Привод 51 двигателя является исполнительным механизмом для изменения рабочего состояния двигателя 52 внутреннего сгорания. В варианте осуществления двигатель 52 внутреннего сгорания представляет собой многоцилиндровый бензиновый двигатель с искровым зажиганием и впрыском и содержит дроссельную заслонку для регулирования количества всасываемого воздуха. Привод 51 двигателя включает в себя, по меньшей мере, исполнительный механизм дроссельной заслонки для изменения степени открытия дроссельной заслонки. ЭБУ 50 двигателя может изменять крутящий момент, создаваемый двигателем 52 внутреннего сгорания, посредством приведения в действие привода 51 двигателя. Крутящий момент, создаваемый двигателем 52 внутреннего сгорания, передается на непоказанные ведущие колеса через непоказанную трансмиссию. Соответственно, управляя приводом 51 двигателя, ЭБУ 50 двигателя может управлять мощностью привода собственного транспортного средства для изменения режима ускорения (ускорения).
[0059] ЭБУ 60 тормоза соединен с тормозным приводом 61. Тормозной привод 61 размещен в гидравлическом контуре между непоказанным главным цилиндром для обеспечения давления рабочей жидкости посредством усилия надавливания на педаль тормоза и тормозными фрикционными механизмами 62, установленными на правых и левых передних колесах, и правых и левых задних колесах. Тормозной фрикционный механизм 62 включает в себя тормозной диск 62а, который закреплен на колесе, и тормозной суппорт 62b, который закреплен на корпусе транспортного средства. Тормозной привод 61 регулирует гидравлическое давление, подаваемое на цилиндр колеса, встроенный в тормозной суппорт 62b, в ответ на команду от ЭБУ 60 тормоза. При воздействии на цилиндр колеса с использованием гидравлического давления, тормозной привод 61 толкает тормозную колодку к тормозному диску 62а, чтобы создать силу торможения трения. Соответственно, управляя тормозным приводом 61, ЭБУ 60 тормоза может управлять тормозным усилием собственного транспортного средства для изменения режима замедления (замедления).
[0060] ЭБУ 70 навигации включает в себя приемник 71 GPS, который принимает сигнал GPS для определения текущего положения собственного транспортного средства, базу 72 данных карты, в которой хранится информация о карте и т.п., и сенсорная панель (дисплей с сенсорной панелью) 73. ЭБУ 70 навигации определяет положение собственного транспортного средства в текущем временном интервале на основе сигнала GPS, выполняет различные вычислительные процессы на основе положения собственного транспортного средства, информации о карте, сохраненной в базе 72 данных карт, и тому подобное, и выполняет прокладку маршрута, используя сенсорную панель 73.
[0061] Информация о карте, хранящаяся в базе 72 данных карты, включает в себя дорожную информацию. Дорожная информация включает в себя параметры, обозначающие положение и форму дороги (например, радиус кривизны или изгиб дороги, ширину полосы дороги, количество полос движения и положение центральной линии каждой полосы). Дорожная информация также включает в себя информацию о типах дорог, что позволяет различать, является ли дорога скоростной.
Процессы управления, выполняемые ЭБУ 10 поддержки вождения
[0062] Далее будут описаны процессы управления, выполняемые ЭБУ 10 поддержки вождения. ЭБУ 10 поддержки вождения выполняет поддержку управления при смене полосы движения, в случае, при котором принят запрос на поддержку при смене полосы движения, когда выполняется как поддержка управления отслеживания полосы, так и адаптивный круиз-контроль. В связи с этим, сначала описывается поддержка управления отслеживания полосы и адаптивный круиз-контроль.
Поддержка управления отслеживания полосы (LTA - Lane Tracing Assist Control)
[0063] Поддержка управления отслеживания полосы представляет собой управление, поддерживающее действия рулем водителем за счет придания крутящего момента рулевому механизму таким образом, чтобы положение собственного транспортного средства поддерживалось вблизи целевой линии движения в «полосе, по которой движется собственное транспортное средство». В варианте осуществления целевая линия движения представляет собой центральную линию CL полосы, однако может быть использована линия, которая смещена от центральной линии CL полосы в направлении ширины полосы движения на заданное расстояние. Соответственно, поддержка управления отслеживания полосы может быть выражена как управление, помогающее выполнению рулевого управления таким образом, чтобы положение движения собственного транспортного средства поддерживалось в полосе в правильном положении по направлению ширины полосы.
[0064] В дальнейшем поддержка управления отслеживания полосы обозначается LTA. Хотя LTA относится ко многим названиям, сам LTA хорошо известен (например, см. публикацию японской патентной заявки №2008-195402, публикацию японской патентной заявки №2009-190464, публикацию японской патентной заявки №2010-6279 и патент Японии 4349210). Соответственно, LTA будет кратко описано ниже.
[0065] ЭБУ 10 поддержки вождения выполняет LTA, в случае, когда LTA запрашивается действием устройства 14 настроек управления. В случае, когда запрашивается LTA, ЭБУ 10 поддержки вождения вычисляет целевой угол θlta* поворота руля, с помощью следующего выражения (1), на основании вышеописанной информации (Cu, Dy, θу) о транспортном средстве, связанной с полосой движения, в заранее заданном вычислительном цикле.

[0066] При этом Klta1, Klta2, Klta3 и Klta4 являются коэффициентами усиления регулирования. Первый элемент на правой стороне представляет собой компонент угла поворота руля, который определяется в зависимости от кривизны Cu дороги и служит в качестве прогнозируемого компонента. Второй элемент на правой стороне представляет собой компонент угла поворота руля, который служит в качестве компонента с обратной связью, чтобы уменьшить угол θy отклонения от курса (чтобы уменьшить отклонение направления собственного транспортного средства от центральной линии CL полосы). То есть второй элемент на правой стороне представляет собой компонент поворота руля, который вычисляется с помощью управления с обратной связью, в котором целевое значение угла θу отклонения от курса равно нулю. Третий элемент на правой стороне представляет собой компонент угла поворота руля, который служит в качестве компонента с обратной связью, чтобы уменьшить боковое отклонение Dy, которое представляет собой зазор (отклонение положения) относительно положения собственного транспортного средства и центральной линии CL полосы в направлении ширины полосы. То есть, третий элемент на правой стороне представляет собой компонент угла поворота руля, который вычисляется с помощью регулирования с обратной связью, в котором целевое значение бокового отклонения Dy равно нулю. Четвертый элемент на правой стороне представляет собой компонент угла поворота руля, который служит в качестве компонента с обратной связью, чтобы уменьшить совокупное значение ΣDy бокового отклонения Dy. То есть четвертый элемент на правой стороне представляет собой компонент угла поворота руля, который вычисляется с помощью регулирования с обратной связью, в котором целевое значение совокупного значения ΣDy равно нулю.
[0067] Например, в случае, когда центральная линия CL полосы изогнута в левом направлении, в случае, когда собственное транспортное средство смещено в сторону в правом направлении от центральной линии CL полосы или в том случае, когда собственное транспортное средство ориентировано в правом направлении относительно центральной линии CL полосы, целевой угол θlta* поворота руля установлен таким образом, что целевой угол θlta* поворота руля является целевым углом в левом направлении. Кроме того, в случае, когда центральная линия CL полосы изогнута в правом направлении, в случае, когда собственное транспортное средство сдвинуто в сторону в левом направлении от центральной линии CL полосы или в том случае, когда собственное транспортное средство ориентировано в левом направлении относительно центральной линии CL полосы, целевой угол θlta* поворота руля установлен таким образом, что целевой угол θlta* поворота руля является целевым углом в правом направлении. Соответственно, ЭБУ 10 поддержки вождения выполняет вычисление на основе вышеуказанного выражения (1), используя знаки, соответствующие, соответственно, левому и правому направлениям.
[0068] ЭБУ 10 поддержки вождения выдает на ЭБУ 20 ЭПР командный сигнал с указанием целевого угла θlta* поворота руля в качестве результата вычисления. ЭБУ 20 ЭПР приводит в действие и регулирует двигатель 22 рулевого управления таким образом, что угол поворота руля следует за целевым углом θlta* поворота руля. В варианте осуществления ЭБУ 10 поддержки вождения выдает на ЭБУ 20 ЭПР командный сигнал с указанием целевого угла θlta* поворота руля, Однако ЭБУ 10 поддержки вождения может вычислять целевой крутящий момент, который позволяет получить целевой угол θlta* поворота руля, и может выдавать на ЭБУ 20 ЭПР командный сигнал с указанием целевого крутящего момента в качестве результата вычисления.
[0069] В случае, когда существует опасение, что собственное транспортное средство покидает полосу движения, ЭБУ 10 поддержки вождения дает предупреждение о выезде из полосы, например, заставляя звучать звуковой сигнал 13. Описание схемы LTA было сделано выше.
Адаптивный круиз-контроль (АСС)
[0070] Адаптивный круиз-контроль представляет собой контроль за тем, чтобы собственное транспортное средство следовало за предыдущим транспортным средством, перемещающимся впереди собственного транспортного средства, при сохранении заранее заданного расстояния в качестве дистанции между транспортными средствами - между следующим впереди транспортным средством и собственным транспортным средством в случае, когда впереди идущее транспортное средство на основе информации о периферии присутствует, а также за тем, чтобы заставить собственное транспортное средство совершать движение с установленной постоянной скоростью транспортного средства в случае, когда впереди идущего транспортного средства не существует. Далее адаптивный круиз-контроль называется АСС. Сам АСС хорошо известен (например, см. публикацию японской патентной заявки №2014-148293, публикацию японской патентной заявки №2006-315491, японский патент №4172434 и японский патент №4929777). Соответственно, АСС будет кратко описан ниже.
[0071] ЭБУ 10 поддержки вождения выполняет АСС, в случае, когда АСС запрашивается действием устройства 14 настроек управления. В случае, когда запрашивается АСС, ЭБУ 10 поддержки вождения выбирает отслеживаемое транспортное средство на основе информации о периферии, обеспечиваемой датчиком 11 периферии. Например, ЭБУ 10 поддержки вождения определяет, существует ли другое транспортное средство в заранее заданной зоне отслеживаемого транспортного средства.
[0072] В случае, когда другое транспортное средство существует в зоне отслеживаемого транспортного средства сверх заранее определенного времени, ЭБУ 10 поддержки вождения выбирает другое транспортное средство в качестве отслеживаемого транспортного средства и устанавливает целевое ускорение таким образом, чтобы собственное транспортное средство следовало за указанным отслеживаемым транспортным средством при сохранении заранее заданной дистанции между транспортными средствами. В случае, когда другого транспортного средства не существует в зоне отслеживаемого транспортного средства, ЭБУ 10 поддержки вождения устанавливает целевое ускорение на основе установки скорости транспортного средства и определенной скорости транспортного средства (скорости транспортного средства, определенной датчиком скорости), так что скорость собственного транспортного средства совпадает с установленной скоростью транспортного средства.
[0073] ЭБУ 10 поддержки вождения управляет приводом 51 двигателя с использованием ЭБУ 50 двигателя и, при необходимости, управляет приводом 61 тормоза с помощью ЭБУ 60 тормоза таким образом, чтобы ускорение собственного транспортного средства совпадало с целевым ускорением. В случае, когда водитель выполняет действие по ускорению во время АСС, ЭБУ 10 поддержки вождения отдает приоритет действию по ускорению и не выполняет автоматическое управление по замедлению для поддержания между транспортной дистанции между следующим впереди транспортным средством и собственным транспортным средством. Описание схемы АСС было сделано выше.
Поддержка управления при смене полосы (LCA)
[0074] Поддержка управления при смене полосы движения представляет собой управление с оказанием помощи водителю при выполнении рулевых действий (действий по смене полосы движения) за счет приложения крутящего момента к рулевому механизму при наблюдении за окружением собственного транспортного средства, при этом собственное транспортное средство перемещается с полосы, по которой транспортное средство в настоящее время движется, на смежную полосу, после того как определено, что смена полосы может быть безопасно выполнена, за счет наблюдения за окружением собственного транспортного средства. Соответственно, с помощью поддержки управления при смене полосы можно изменить полосу движения, по которой движется собственное транспортное средство, не требуя действий рулем водителем (работы руля). Далее поддержка управления при смене полосы называется LCA.
[0075] LCA представляет собой управление поперечным положением собственного транспортного средства на полосе, аналогично LTA, и выполняется вместо LTA, в случае, когда запрос на поддержку при смене полосы движения принимается во время выполнения LTA и АСС. В дальнейшем LTA и LCA совместно называются поддержкой рулевого управления, и режим поддержки рулевого управления называется режимом поддержки рулевого управления.
[0076] Поддержка рулевого управления представляет собой управление, которое помогает водителю осуществлять рулевое управление. Поэтому при выполнении поддержки рулевого управления (LTA, АСС), ЭБУ 10 поддержки вождения создает мощность рулевого управления для поддержки рулевого управления таким образом, что приоритет отдается действиям рулем водителем. Соответственно, даже во время поддержки рулевого управления, водитель может перемещать собственное транспортное средство в нужном направлении, за счет собственных действий рулем.
[0077] На фиг. 5 показана процедура поддержки рулевого управления, которая выполняется ЭБУ 10 поддержки вождения. Процедура поддержки рулевого управления выполняется в том случае, когда выполняется условие разрешения выполнения LTA. Условие разрешения выполнения LTA включает в себя условие, что выполнение LTA выбрано посредством устройства 14 настроек управления, условие, что выполняется АСС, условие, что датчик 12 камеры может распознавать белые линии и тому подобное.
[0078] Когда запускается процедура поддержки рулевого управления, ЭБУ 10 поддержки вождения устанавливает режим поддержки рулевого управления в режим LTA - ВКЛ на этапе S11. Режим LTA - ВКЛ означает режим управления, в котором выполняется LTA.
[0079] Затем на этапе S12 ЭБУ 10 поддержки вождения определяет, выполняется ли условие запуска LCA.
[0080] Например, условие запуска LCA выполняется в случае выполнения всех следующих условий. 1. Определяется операция запроса на смену полосы движения (сигнал запроса на смену полосы движения). 2. Выполнение LCA выбирается посредством устройства 14 настроек управления. 3. Белая линия в направлении действия мигающего сигнала (белая линия в качестве границы между предыдущей полосой и целевой полосой) является прерывистой линией. 4. Результат определения выполнения LCA, основанный на мониторинге периферии, является положительным (препятствие (другое транспортное средство или что-то подобное), которое препятствует смене полосы движения, не обнаружено, и определено, что смена полосы безопасно выполняется, из информации о периферии, полученной с помощью датчика 11 периферии). 5. Дорога представляет собой скоростную автомагистраль (информация о типе дороги, полученная от ЭБУ 70 навигации, указывает на скоростную автомагистраль). 6. Скорость собственного транспортного средства соответствует допустимому диапазону скоростей транспортного средства, в котором допускается LCA. Например, условие 4 выполняется в случае, когда произведена оценка, что между транспортная дистанция между собственным транспортным средством и другим транспортным средством, движущимся по целевой полосе, должным образом поддерживает безопасность после смены полосы движения, на основе относительной скорости между собственным транспортным средством и другим транспортным средством. Условие запуска LCA не ограничивается указанными условиями и может быть задано произвольно.
[0081] В случае, когда условие запуска LCA не выполняется, ЭБУ 10 поддержки вождения возвращается к процессу на этап S11 и продолжает выполнение LTA.
[0082] Когда условие запуска LCA выполняется во время выполнения LTA (S12: да), ЭБУ 10 поддержки вождения выполняет LCA вместо LTA на этапе S13. В этом случае ЭБУ 10 поддержки вождения устанавливает режим поддержки рулевого управления в состояние первой части LCA. Режим поддержки рулевого управления, относящегося к LCA, разделяется на состояние первой части LCA и состояние второй части LCA, и устанавливается в состояние первой части LCA в начале LCA. После того, как режим поддержки рулевого управления установлен в состояние первой части LCA, ЭБУ 10 поддержки вождения отправляет команду отображения выполнения LCA на ЭБУ 30 измерителя. Таким образом, состояние выполнения LCA отображается на устройстве 31 отображения.
[0083] На фиг. 8 показан иллюстративный экран 31a, который должен отображаться на устройстве 31 отображения во время выполнения LTA (обозначенный экраном 31a LTA), и иллюстративный экран 31b, который должен отображаться во время выполнения LCA (обозначенный экраном 31b LCA). На обоих экранах 31a LTA и экране 31b LCA отображается изображение, на котором перемещается собственное транспортное средство между правой и левой белыми линиями. На экране 31a LTA виртуальные стены GW отображаются за пределами правой и левой белых линий GWL. Посредством стен GW водитель может определить, что собственное транспортное средство находится в положении, когда собственное транспортное средство управляется так, чтобы ехать по полосе.
[0084] С другой стороны, на экране 31b LCA, изображения стенок GW стираются, и вместо этого отображается траектория Z в LCA. ЭБУ 10 поддержки вождения переключает экран, который будет отображаться на устройстве 31 отображения, между экраном 31a LTA и экраном 31b LCA, в зависимости от режима поддержки рулевого управления. Таким образом, водитель может легко определить, является ли статус выполнения поддержки рулевого управления LTA или LCA.
[0085] LCA представляет собой управление, просто поддерживающее действия водителя по рулевому управлению для смены полосы движения, и водитель обязан отслеживать окружающую ситуацию. Поэтому, чтобы напомнить водителю об отслеживании окружающей ситуации, на экране 31b LCA отображается сообщение GM «ПРОВЕРИТЬ ОКРУЖАЮЩУЮ СИТУАЦИЮ»
[0086] При запуске LCA, во-первых, ЭБУ 10 поддержки вождения вычисляет целевую траекторию на этапе S14 процедуры, показанной на фиг. 5. При этом будет описана целевая траектория в LCA.
[0087] При выполнении LCA ЭБУ 10 поддержки вождения вычисляет функцию целевой траектории, которая определяет целевую траекторию собственного транспортного средства. Целевая траектория представляет собой траекторию для перемещения собственного транспортного средства с полосы (называемой предыдущей полосой), по которой в настоящее время движется собственное транспортное средство в центральное положение по ширине (называемое конечным целевым поперечным положением) на полосе (называемой целевой полосой), которая является смежной предыдущей полосе и которая находится в направлении запроса на поддержку при смене полосы движения, в течение целевого времени смены полосы. Например, целевая траектория имеет форму, показанную на фиг. 9.
[0088] Как описано ниже, функция целевой траектории является функцией использования в качестве переменной времени t, истекшего от момента времени запуска LCA (то есть момента времени, когда условие начала LCA выполняется) и вычисления целевого значения (то есть целевого поперечного положения) поперечного положения собственного транспортного средства, соответствующего истекшему времени t, относительно центральной линии CL предыдущей полосы. При этом поперечное положение собственного транспортного средства означает положение центра тяжести собственного транспортного средства в направлении ширины полосы (также называемом поперечным направлением) относительно центральной линии CL полосы.
[0089] Целевое время смены полосы переменно устанавливается пропорционально интервалу (далее называемому необходимым боковым интервалом), на который собственное транспортное средство перемещается в поперечном направлении от начального положения, которое является положением в момент запуска LCA (поперечное положение собственного транспортного средства в момент времени запуска LCA) до конечного целевого поперечного положения. Например, в случае, когда ширина полосы составляет 3,5 м, что является обычным размером, целевое время смены полосы, например, устанавливается на 8,0 секунд. В этом примере, в момент запуска LCA, собственное транспортное средство находится на центральной линии CL предыдущей полосы. Целевое время смены полосы регулируется пропорционально размеру ширины полосы. Соответственно, по мере того, как ширина полосы увеличивается, целевое время смены полосы устанавливается на большее значение. С другой стороны, по мере того, как ширина полосы уменьшается, целевое время смены полосы устанавливается на меньшее значение.
[0090] В случае, когда поперечное положение собственного транспортного средства в момент запуска LCA смещается от центральной линии CL предыдущей полосы в сторону смены полосы, целевое время смены полосы устанавливается таким образом, что целевое время смены полосы уменьшается при возрастании величины смещения (бокового отклонения Dy). С другой стороны, в случае, когда поперечное положение собственного транспортного средства в момент запуска LCA смещается от средней линии CL предыдущей полосы в сторону, противоположную стороне смены полосы движения, целевое время смены полосы устанавливается таким образом, что целевое время смены полосы увеличивается при возрастании величины смещения (бокового отклонения Dy). Например, в случае, когда величина смещения составляет 0,5 м, величина регулирования уменьшения-увеличения для целевого времени смены полосы устанавливается равной 1,14 с (=8,0±0,5/3,5). Вышеописанное значение для установки целевого времени смены полосы является просто примером, и может использоваться произвольно установленное значение.
[0091] В варианте осуществления целевое поперечное положение у вычисляется функцией у (t) целевой траектории, показанной в следующем выражении (2). Функция целевой траектории у (t) является функцией пятой степени, в которой истекшее время t используется, как переменная.

Функция у (t) целевой траектории принимается за функцию, которая позволяет собственному транспортному средству плавно перемещаться в конечное целевое поперечное положение.
[0092] Здесь коэффициенты c0, c1, с2, c3, с4, с5 определяются состоянием (значением начального поперечного состояния) собственного транспортного средства в момент запуска LCA и целевым состоянием (значением конечного целевого поперечного состояния) собственного транспортного средства по завершении LCA.
[0093] Например, как показано на фиг. 10, функция (t) целевой траектории является функцией вычисления целевого поперечного положения у (t) собственного транспортного средства С, соответствующего истекшему времени t (также называемому текущим временем t) от момента времени запуска LCA (момента времени вычисления целевой траектории) относительно центральной линии CL полосы (предыдущей полосы), на которой перемещается собственное транспортное средство С в текущий момент времени. На фиг. 10 полоса формируется линейно. В случае, когда полоса формируется как кривая, функция у (t) целевой траектории является функцией вычисления целевого поперечного положения собственного транспортного средства относительно центральной линии CL полосы, формируемой как кривая.
[0094] Для определения коэффициентов c0, c1, с2, c3, с4, с5, ЭБУ 10 поддержки вождения устанавливает параметры вычисления целевой траектории следующим образом. Параметрами вычисления целевой траектории являются следующие семь параметров (P1 - Р7).
Р1. Поперечное положение (именуемое начальным поперечным положением) собственного транспортного средства относительно центральной линии предшествующей полосы в момент запуска LCA.
Р2. Скорость (именуемая начальной поперечной скоростью) собственного транспортного средства в поперечном направлении в момент запуска LCA.
Р3. Ускорение (называемое начальным поперечным ускорением) собственного транспортного средства в поперечном направлении в момент запуска LCA.
Р4. Целевое поперечное положение (называемое конечным целевым поперечным положением) собственного транспортного средства по отношению к центральной линии предыдущей полосы в момент времени, когда LCA завершено (обозначается как время завершения LCA).
Р5. Целевая скорость (называемая конечной целевой поперечной скоростью) собственного транспортного средства в поперечном направлении в момент Р5 времени завершения LCA.
Р6. Целевое ускорение (называемое конечным целевым поперечным ускорением) собственного транспортного средства в поперечном направлении в момент Р6 времени завершения LCA.
Р7. Целевое время (называемое целевым временем смены полосы), которое является целевым значением времени, в течение которого выполняется LCA (временем от времени начала LCA до времени завершения LCA). Как описано выше, поперечное направление представляет собой направление по ширине полосы. Соответственно, поперечная скорость означает скорость собственного транспортного средства в направлении ширины полосы, а поперечное ускорение означает ускорение собственного транспортного средства в направлении ширины полосы.
[0095] Процесс установки указанных семи параметров вычисления целевой траектории называется процессом инициализации. В процессе инициализации параметры вычисления целевой траектории устанавливаются следующим образом. То есть начальное поперечное положение устанавливается на значение, равное боковому отклонению Dy, определенному датчиком 12 камеры во время начала LCA. Начальная поперечная скорость установлена на значение (v⋅sin(θy)), полученное в результате умножения скорости v транспортного средства, определенной датчиком скорости в момент запуска LCA, на величину синуса (sin(θy)) угла θу отклонения от курса, определенного датчиком 12 камеры. Начальное поперечное ускорение устанавливается на значение (v⋅γ), полученное в результате умножения скоростиγ (rad/s) отклонения от курса, определенной датчиком скорости отклонения от курса в момент запуска LCA, на скорость v транспортного средства. Начальное поперечное ускорение может быть приравнено к дифференциальному значению вышеуказанной начальной поперечной скорости. Начальное поперечное положение, начальная поперечная скорость и начальное поперечное ускорение в совокупности именуются начальным значением поперечного состояния.
[0096] ЭБУ 10 поддержки вождения в варианте осуществления рассматривает ширину целевой полосы, как равную ширине полосы предыдущей полосы, определенной датчиком 12 камеры. Соответственно, конечное целевое поперечное положение устанавливается на значение, равное ширине полосы предыдущей полосы (конечное целевое поперечное положение = ширина полосы предыдущей полосы). Кроме того, ЭБУ 10 поддержки вождения устанавливает оба значения конечной целевой поперечной скорости и конечного целевого поперечного ускорения на нуль. Конечное целевое поперечное положение, конечная целевая поперечная скорость и конечное целевое поперечное ускорение совместно именуются конечным значением целевого поперечного состояния.
[0097] Как описано выше, время смены на целевую полосу рассчитывается на основе ширины полосы (или ширины предыдущей полосы) и величины смещения собственного транспортного средства в поперечном направлении в момент запуска LCA. Например, целевое время tlen смены полосы вычисляется следующим выражением (3).

Здесь Dini - необходимое расстояние для перемещения собственного транспортного средства из положения запуска LCA (начального поперечного положения) в положение завершения LCA (конечное целевое поперечное положение) в поперечном направлении. Соответственно, когда собственное транспортное средство находится на центральной линии CL предыдущей полосы в момент запуска LCA, Dini устанавливается на значение, равное ширине полосы, и когда собственное транспортное средство смещается от центральной линии CL предыдущей полосы, Dini - это значение, полученное в результате увеличения или уменьшения ширины полосы на величину смещения. А является постоянной (называемая постоянной установки целевого времени), обозначающей целевое время, затрачиваемое на перемещение собственного транспортного средства в поперечном направлении на единицу расстояния и, например, устанавливается на (8 с /3,5 м = 2,29 с / м). В этом примере в случае, когда необходимое расстояние Dini для перемещения собственного транспортного средства в поперечном направлении составляет, например, 3,5 м, целевое время tlen смены полосы устанавливается на 8 секунд.
[0098] Постоянная А установки целевого времени не ограничена приведенным выше значением и может быть установлена произвольно. Кроме того, например, используя устройство 14 настроек управления, заданная постоянная А установки целевого времени может быть выбрана из множества постоянных в зависимости от предпочтений водителя. В качестве альтернативного варианта, целевое время смены полосы может быть фиксированным значением.
[0099] ЭБУ 10 поддержки вождения вычисляет коэффициенты c0, c1, с2, с3, с4, с5 функции у (t) целевой траектории, выраженные выражением (2), на основе начального значения поперечного положения, конечного целевого значения поперечного состояния и целевого времени смены полосы, которые оцениваются процессом инициализации параметров вычисления целевой траектории и решают функцию целевой траектории у (t).
[0100] Из функции у (t) целевой траектории, выраженной приведенным выше выражением (2), поперечная скорость y'(t) собственного транспортного средства может быть выражена следующим выражением (4), и поперечное ускорение y''(t) собственного транспортного средства может быть выражено следующим выражением (5).


[0101] При этом, когда исходным поперечным положением является у0, начальная поперечная скорость равна vy0, начальное поперечное ускорение равно ау0, конечное целевое поперечное положение y1, конечная целевая поперечная скорость равна vy1, конечная целевая поперечная скорость равна ay1, а ширина предыдущей полосы равна W, следующие реляционные выражения получают на основе вышеуказанных параметров вычисления целевой траектории.






[0102] Соответственно, из указанных шести выражений (6)-(11) можно вычислить значения коэффициентов с0, c1, с2, с3, с4, с5 функции у (t) целевой траектории. Затем вычисленные значения коэффициентов с0, c3, с2, с3, с4, с5 подставляются в выражение (2), и, таким образом, вычисляется функция у (t) целевой траектории. ЭБУ 10 поддержки вождения удерживает функцию у (t) целевой траектории до окончания LCA. Одновременно с вычислением функции у (t) целевой траектории, ЭБУ 10 поддержки вождения активирует таймер (начальное значение: ноль) и начинает отсчитывать истекшее время t от запуска LCA.
[0103] После того, как ЭБУ 10 поддержки вождения вычисляет функцию целевой траектории таким образом, ЭБУ 10 поддержки вождения на следующем этапе S15 выполняет рулевое управление на основе функции целевой траектории. Рулевое управление будет описано особо.
[0104] Сначала ЭБУ 10 поддержки вождения вычисляет значение целевого поперечного состояния собственного транспортного средства в текущий момент времени. Значение целевого поперечного состояния включает в себя целевое поперечное положение, которое является целевым значением поперечного положения собственного транспортного средства в направлении ширины полосы, целевую поперечную скорость, которая является целевым значением скорости (поперечной скорости) собственного транспортного средства в направлении ширины полосы, и целевое поперечное ускорение, которое является целевым значением ускорения (поперечного ускорения) собственного транспортного средства в направлении ширины полосы. Поперечная скорость и поперечное ускорение в совокупности именуются значением состояния поперечного движения, а целевая поперечная скорость и целевое поперечное ускорение в совокупности именуются целевым значением состояния поперечного движения.
[0105] В этом случае ЭБУ 10 поддержки вождения вычисляет целевое поперечное положение, целевую поперечную скорость и целевое поперечное ускорение в текущее время на основе функции у (t) целевой траектории, определенной на этапе S14, и текущего времени t. Текущее время t представляет собой время, истекшее после того, как функция у (t) целевой траектории определяется на этапе S14, и эквивалентно истекшему времени с запуска LCA. После того, как ЭБУ 10 поддержки вождения вычисляет функцию у (t) целевой траектории на этапе S14, ЭБУ 10 поддержки вождения сбрасывает таймер и начинает отсчитывать истекшее время t (= текущее время t) с начала LCA. Целевое поперечное положение рассчитывается путем подстановки текущего времени t в функцию у (t) целевой траектории, целевую поперечную скорость рассчитывают, подставляя текущее время t в функцию у'(t), полученную в результате нахождения производной первого порядка функции у (t) целевой траектории, и целевое поперечное ускорение вычисляют путем подстановки текущего времени t в функцию у'' (t), полученную в результате нахождения производной второго порядка функции у (t) целевой траектории. ЭБУ 10 поддержки вождения отсчитывает истекшее время t, измеренное таймером, и вычисляет величину целевого поперечного состояния на основании времени измерения t и вышеуказанных функций.
[0106] Далее целевое поперечное положение в текущее время представлено у*, целевая поперечная скорость в текущее время представлена vy*, а целевое поперечное ускорение в текущее время представлено ау*.
[0107] Впоследствии ЭБУ 10 поддержки вождения вычисляет величину целевого состояния отклонения от курса, которая является целевым значением касательно движения для изменения ориентации собственного транспортного средства. Целевое значение состояния отклонения от курса указывает на целевой угол θу* отклонения от курса собственного транспортного средства, целевую скорость γ* отклонения от курса собственного транспортного средства и целевую кривизну Cu* в текущий момент времени. Целевая кривизна Cu* представляет собой кривизну траектории для смены полосы движения собственного транспортного средства, то есть кривизну компонента изгиба для смены полосы, которая не включает в себя кривизну изгиба полосы.
[0108] ЭБУ 10 поддержки вождения считывает скорость v транспортного средства в текущий момент времени (текущую скорость транспортного средства, определяемую датчиком скорости), и вычисляет целевой угол θу* отклонения от курса, целевую скорость γ* отклонения от курса и целевую кривизну Cu * в текущий момент времени, на основе скорости v движения, целевой поперечной скорости vy* и целевого поперечного ускорения ау*, используя следующие выражения (12), (13), (14).
[0109]



То есть, целевой угол θу* отклонения от курса рассчитывается путем подстановки значения, полученного в результате деления целевой поперечной скорости vy* на скорость v транспортного средства, в функцию арксинуса. Целевая скорость у* отклонения от курса рассчитывается путем деления целевого поперечного ускорения ау* на скорость v транспортного средства. Целевая кривизна Cu* рассчитывается путем деления целевого поперечного ускорения ау* на квадрат скорости v транспортного средства.
[0110] Впоследствии ЭБУ 10 поддержки вождения вычисляет целевую регулируемую переменную в LCA. В варианте осуществления ЭБУ 10 поддержки вождения вычисляет целевой угол θlca* поворота руля в качестве целевой регулируемой переменной. Целевой угол θlca* поворота руля рассчитывается на основе целевого поперечного положения у*, целевого угла θу* отклонения от курса, целевой скорости γ* отклонения от курса, целевой кривизны Cu* и кривизны Cu, которые вычисляются, как описано выше, используя следующее выражение (15).

[0111] При этом Klca1, Klca2, Klca3, Klca4 и Klca5 являются коэффициентами усиления регулирования. Cu - кривизна, определяемая датчиком 12 камеры в текущий момент времени (во время вычисления). Кроме того, у представляет собой поперечное положение, определяемое датчиком 12 камеры в текущий момент времени (во время вычисления), то есть соответствует Dy. Кроме того, θу - угол отклонения от курса, определяемый датчиком 12 камеры в момент времени (во время вычисления). Кроме того, γ представляет собой скорость отклонения от курса собственного транспортного средства, определяемая датчиком скорости отклонения от курса в текущий момент времени. В качестве γ, можно использовать дифференциальное значение угла θу отклонения от курса.
[0112] Первый член с правой стороны представляет собой прогнозируемую регулируемую переменную, которая определяется в зависимости от суммы целевой кривизны Cu* и кривизны Cu (изгиба полосы). Klca1 Cu* представляет собой прогнозируемую регулируемую переменную для смены полосы движения, а Klca1⋅Cu представляет собой прогнозируемую регулируемую переменную для перемещения собственного транспортного средства вдоль изгиба полосы. Соответственно, регулируемая переменная, выраженная первым элементом на правой стороне, в основном устанавливается на значение, которое позволяет собственному транспортному средству перемещаться по целевому курсу, когда угол поворота руля управляется регулируемой переменной. В этом случае коэффициент Klca1 усиления регулирования устанавливается на значение, которое зависит от скорости v транспортного средства. Например, коэффициент Klca1 усиления регулирования может быть установлен в зависимости от колесной базы L и коэффициента Ksf устойчивости (фиксированных значений, определенных для каждого транспортного средства), с использованием следующего выражения (16). Здесь K является фиксированным коэффициентом усиления регулирования.

[0113] Элементы со второго по пятый на правой стороне являются регулируемыми переменными с обратной связью. Второй элемент на правой стороне представляет собой компонент угла поворота руля, который служит в качестве компонента с обратной связью, чтобы уменьшить отклонение между целевым углом θу* отклонения от курса и фактическим углом θу отклонения от курса. Третий элемент на правой стороне представляет собой компонент угла поворота руля, который служит в качестве компонента с обратной связью, чтобы уменьшить отклонение между целевым поперечным положением у* и фактическим поперечным положением у. Четвертый элемент на правой стороне представляет собой компонент угла поворота руля, который служит в качестве компонента с обратной связью, чтобы уменьшить отклонение между целевой скоростью γ* отклонения от курса и фактической скоростью γ отклонения от курса. Пятый элемент на правой стороне представляет собой компонент угла поворота руля, который служит в качестве компонента с обратной связью, чтобы уменьшить совокупное значение Σ(у*-у) отклонения между целевым поперечным положением у* и фактическим поперечным положением у.
[0114] Целевой угол θlca* поворота руля не ограничивается целевым углом поворота руля, рассчитанным с помощью пяти компонентов угла поворота руля. При вычислении могут использоваться только произвольные компоненты угла поворота руля из числа компонентов угла поворота руля, или при вычислении может быть добавлен другой компонент угла поворота руля. Например, в качестве регулируемой переменной с обратной связью, связанной с движением отклонения от курса, можно использовать либо отклонение угла отклонения от курса, либо отклонение скорости отклонения от курса. Кроме того, может быть исключена регулируемая переменная с обратной связью, использующая совокупное значение Σ(у*-у) отклонения между целевым поперечным положением у* и фактическим поперечным положением у.
[0115] После того, как ЭБУ 10 поддержки вождения вычисляет целевую регулируемую переменную, ЭБУ 10 поддержки вождения посылает команду рулевого управления, обозначающую целевую регулируемую переменную, на ЭБУ 20 ЭПР. В варианте осуществления ЭБУ 10 поддержки вождения вычисляет целевой угол θlca* поворота руля как целевую регулируемую переменную. Однако ЭБУ 10 поддержки вождения может вычислить целевой крутящий момент, который задает целевой угол θlca* поворота руля, и может отправить команду рулевого управления, обозначающую целевой крутящий момент, на ЭБУ 20 ЭПР. Описание процесса на этапе S15 было выполнено выше.
[0116] Когда ЭБУ 20 ЭПР принимает команду рулевого управления от ЭБУ 10 поддержки вождения через ЛКС 100, ЭБУ 20 ЭПР приводит в действие и управляет электродвигателем 22 рулевого управления таким образом, чтобы угол поворота руля следовал за целевым углом θlca* поворота руля.
[0117] Затем на этапе S16 ЭБУ 10 поддержки вождения определяет, является ли состояние выполнения смены полосы движения второй частью.
[0118] Здесь будет описано определение того, является ли состояние выполнения смены полосы движения первой частью или второй частью. ЭБУ 10 поддержки вождения определяет состояние выполнения смены полосы движения в зависимости от положения контрольной точки (центра тяжести транспортного средства в варианте осуществления) собственного транспортного средства. Поскольку контрольная точка собственного транспортного средства находится ближе к конечному целевому поперечному положению (центральному положению по ширине на целевой полосе), степень выполнения смены полосы выше. ЭБУ 10 поддержки вождения сравнивает положение контрольной точки транспортного средства и заранее заданное положение определения, и таким образом, определяет, является ли состояние выполнения смены полосы первой частью смены полосы или второй частью смены полосы. Когда положение контрольной точки собственного транспортного средства (далее называемого также просто положением или поперечным положением собственного транспортного средства) находится на стороне, противоположной стороне смены полосы движения (то есть на стороне предыдущей полосы) от положения определения, ЭБУ 10 поддержки вождения определяет, что состояние выполнения смены полосы движения является первой частью смены полосы движения. Когда поперечное положение собственного транспортного средства находится на стороне смены полосы движения от положения определения, ЭБУ 10 поддержки вождения определяет, что состояние выполнения смены полосы движения является второй частью смены полосы. Функциональный блок ЭБУ 10 поддержки вождения, который определяет состояние выполнения смены полосы движения и определяет, является ли состояние выполнения смены полосы движения первой частью смены полосы или второй частью смены полосы движения, в изобретении может исполнять назначение блока определения состояния выполнения.
[0119] Как описано ниже, во время выполнения LCA, периферийные транспортные средства контролируются на основе информации о периферии, полученной датчиком 11 периферии. В случае обнаружения другого транспортного средства (также называемого приближающимся транспортным средством), которое предположительно может аварийно сблизиться с собственным транспортным средством на целевой полосе, во время продолжения LCA, LCA останавливается. Когда можно предотвратить выход части собственного транспортного средства за предыдущую полосу движения, приближающееся транспортное средство не сталкивается с собственным транспортным средством. Между тем, в случае, когда собственное транспортное средство въехало на целевую полосу, необходимо избегать столкновения между собственным транспортным средством и приближающимся транспортным средством.
[0120] Соответственно, ЭБУ 10 поддержки вождения в варианте осуществления определяет состояние выполнения смены полосы движения и переключает процесс, когда приближающееся транспортное средство распознается между первой частью и второй частью смены полосы. Соответственно, определяется состояние выполнения смены полосы движения как первая часть или вторая часть. Определение состояния выполнения смены полосы движения выполняется на основе информации о полосе, которая распознается датчиком 12 камеры.
Иллюстративный способ 1 определения - первая или вторая часть
[0121] Например, в случае, когда производится оценка, что кузов собственного транспортного средства полностью находится на предыдущей полосе, ЭБУ 10 поддержки вождения определяет, что состояние выполнения смены полосы движения относится к первой части. В случае, когда производится оценка, что, по меньшей мере, часть кузова собственного транспортного средства находится на целевой полосе за пределами предыдущей полосы, ЭБУ 10 поддержки вождения определяет, что состояние выполнения смены полосы относится ко второй части. В этом случае, то, что боковая поверхность собственного транспортного средства переместилась в направлении смены полосы на сторону целевой полосы за пределы граничной белой линии в качестве границы между предыдущей полосой и целевой полосой (например, пересекла ли шина граничную белую линию в направлении смены полосы), может быть определено на основе информации о полосе (в частности, ширины полосы и бокового отклонения Dy), определенной датчиком 12 камеры и размером кузова транспортного средства (в частности, ширины кузова транспортного средства).
Иллюстративный способ 2 определения - первая или вторая часть
[0122] Как описано ниже, в случае, когда приближающееся транспортное средство определяется в первой части смены полосы, LCA досрочно останавливается, а рулевое управление выполняется так, что собственное транспортное средство поворачивает (или перемещается) в центральное положение предыдущей полосы в направлении ширины полосы на предыдущей полосе. Указанное рулевое управление называется управлением отменой LCA. Даже когда обнаружено приближающееся транспортное средство и выполняется управление отменой LCA, существует опасение, что собственное транспортное средство попадет на целевую полосу из-за задержки при ответном управлении, задержки в распознавании белых линий, задержки распознавания в мониторинге периферии, задержки в вычислении и т.п. Соответственно, принимая во внимание перерегулирование (расстояния в поперечном направлении движения в направлении смены полосы движения) из-за задержки, вызванной этими факторами (из-за времени задержки от момента времени, когда приближающееся транспортное средство распознается, до момента времени, когда поперечная скорость собственного транспортного средства переключается в направлении, противоположном направлению смены полосы), состояние выполнения смены полосы может переключаться между первой частью и второй частью в более ранний срок перед тем, как боковая поверхность (шина) собственного транспортного средства пересечет граничную белую линию.
[0123] В этом случае, то, вышла ли боковая поверхность собственного транспортного средства на стороне целевой траектории за пределы граничной белой линии, может определяться на основе прогнозного поперечного положения Dyf, в котором принимается во внимание перерегулирование. Перерегулирование больше, поскольку поперечная скорость собственного транспортного средства выше. Соответственно, прогнозное поперечное положение Dyf может быть вычислено следующим выражением (17), и то, вышла ли боковая поверхность собственного транспортного средства на стороне целевой траектории за пределы граничной белой линии, может быть определено на основе прогнозного поперечного положения Dyf.

Здесь Dy представляет собой боковое отклонение в текущий момент времени, vy представляет собой поперечную скорость в текущий момент времени, а Tre представляет собой заранее заданное время (называемое прогнозным временем) для компенсации задержки ответа.
[0124] В этом случае положение, которое отклонено от поперечного положения собственного транспортного средства, обнаруженного датчиком 12 камеры в поперечном направлении (в направлении приближения к целевой полосе по отношению к центру предыдущей полосы) на заранее заданное расстояние (vy⋅Tre), установленное в зависимости от поперечной скорости vy, рассматривается как поперечное положение (прогнозное положение) собственного транспортного средства. Затем определяется, выходит ли боковая поверхность собственного транспортного средства в прогнозном положении за пределы граничной белой линии.
Иллюстративный способ 3 определения - первая или вторая часть
[0125] Например, конкретное положение, в котором оценивается, что собственное транспортное средство не попадет на целевую полосу за счет управления отменой LCA, может быть предварительно определено, как точка определения. Например, в качестве положения определения принимается Dy=0,5 м (фиксированное значение). Это положение определения представляет собой положение на стороне смены полосы относительно центральной линии CL полосы. В этом случае, когда положение центра тяжести собственного транспортного средства не выходит за пределы положения 0,5 м от центральной линии CL полосы движения в сторону смены полосы движения, то есть, когда боковое отклонение Dy на сторону смены полосы движения составляет 0,5 м или менее, определяется, что смена полосы является первой частью, а когда боковое отклонение Dy на сторону смены полосы превышает 0,5 м, определяется, что смена полосы является второй частью. В этом примере в случае, когда ширина полосы составляет 3,5 м, а ширина собственного транспортного средства составляет 1,8 м, например, когда боковое отклонение Dy составляет 0,5 м, расстояние между положением центра тяжести составляет 1,25 m (=(3.5/2)-0.5), и поэтому, расстояние между боковой поверхностью собственного транспортного средства на стороне смены полосы и граничной белой линией составляет 0,35 m (=1.25-(1.8/2)). Соответственно, в этом примере, когда перерегулирование составляет 0,35 м или менее, можно предотвратить попадание собственного транспортного средства на целевую полосу посредством управления отменой LCA. В случае использования этого способа определения первая или вторая часть, положение определения может быть установлено с учетом ширины полосы и величины перерегулирования.
[0126] Другими словами, в иллюстративном способе 2 определения первая или вторая часть и иллюстративном способе 3 определения первая или вторая части, ЭБУ 10 поддержки вождения выполнен с возможностью назначения положения определения в конкретном местоположении, где собственное транспортное средство находится на стороне центра предыдущей полосы от границы между предыдущей полосой и целевой полосой, и где собственное транспортное средство находится на стороне границы от центрального положения предыдущей полосы в направлении ширины предыдущей полосы, чтобы определить, что состояние выполнения является первой частью в случае, когда произведена оценка, что собственное транспортное средство расположено в направлении, противоположном направлению смены полосы движения, от положения определения, а чтобы определить, что состояние выполнения является второй частью в случае, когда произведена оценка, что собственное транспортное средство расположено в направлении смены полосы движения от положения определения.
[0127] В нижеследующем описании ЭБУ 10 поддержки вождения определяет состояние выполнения смены полосы движения, используя иллюстративный способ 2 определения первая часть или вторая часть, и иллюстративный способ 3 определения первая часть или вторая часть.
[0128] Описание возвращается к процедуре поддержки рулевого управления на фиг. 5. Поскольку состояние выполнения в момент запуска LCA является первой частью, на этапе S16 выполняется определение «Нет». В этом случае на этапе S17, ЭБУ 10 поддержки вождения определяет, есть ли другое транспортное средство, которое аварийно сближается с собственным транспортным средством (другое транспортное средство, которое может столкнуться с собственным транспортным средством), когда собственное транспортное средство выполняет смену полосы по целевой траектории на основе информации о периферии, полученной датчиком 11 периферии.
[0129] Например, ЭБУ 10 поддержки вождения вычисляет прогнозируемое время (время ТТС столкновения: время до столкновения) от текущего момента времени до столкновения другого транспортного средства с собственным транспортным средством в зависимости от относительной скорости между собственным транспортным средством и «иным транспортным средством, которое присутствует на предыдущей полосе или полосе смежной с предыдущей полосой», и расстояния между собственным транспортным средством и другим транспортным средством. ЭБУ 10 поддержки вождения определяет, является ли время ТТС столкновения равным или больше порогового значения TTC1 первой части, и выводит результат контроля периферии в качестве результата определения. Когда время ТТС столкновения равно или больше порогового значения TTC1 первой части, результатом контроля периферии является «отсутствует приближающееся транспортное средство», а когда время ТТС столкновения меньше порогового значения TTC1 первой части, результатом контроля периферии является «приближение транспортного средства». Например, пороговое значение TTC1 первой части установлено на четыре секунды.
[0130] Кроме того, на этапе S17, ЭБУ 10 поддержки вождения может определить, имеется ли другое транспортное средство в поперечном направлении собственного транспортного средства, и может определить, приближается ли транспортное средство, в случае, когда в поперечном направлении собственного транспортного средства имеется другое транспортное средство. Кроме того, на этапе S17 ЭБУ 10 поддержки вождения может определить, приближается ли аварийно собственное транспортное средство к другому транспортному средству, которое находится на целевой полосе, когда собственное транспортное средство выполняет смену полосы с поддержкой LCA, исходя из расстояния до другого транспортного средства и относительной скорости, и может определить, приближается ли транспортное средство, в случае, когда собственное транспортное средство аварийно приближается к другому транспортному средству.
[0131] В случае, когда результатом контроля периферии является «отсутствует приближающееся транспортное средство» на этапе S17 (S17: Да), ЭБУ 10 поддержки вождения возвращает процесс на этап S15, а в случае, когда результатом контроля периферии является «приближение транспортного средства» (S17: Нет), ЭБУ 10 поддержки вождения переходит к процессу на этапе S30. Здесь будет описан случай, когда результатом контроля периферии является «нет приближающегося транспортного средства».
[0132] Хотя результатом контроля периферии является «отсутствует приближающееся транспортное средство», ЭБУ 10 поддержки вождения повторяет процессы вышеописанных этапов S15-S17 в заранее заданном вычислительном цикле. Таким образом, LCA продолжается, и собственное транспортное средство движется по направлению к целевой полосе.
[0133] После повторения указанных процессов, в случае, когда состояние выполнения смены полосы движения является второй частью (S16: Да), ЭБУ 10 поддержки вождения устанавливает режим поддержки рулевого управления в состояние второй части LCA на этапе S18. Само по себе содержимое управления LCA не отличается между состоянием первой части LCA и состоянием второй части LCA, до тех пор, пока LCA не останавливается при обнаружении приближающегося транспортного средства. Другими словами, в случае, когда LCA останавливается при обнаружении приближающегося транспортного средства, последующий процесс отличается в зависимости от того, является ли состояние выполнения смены полосы в момент времени, когда LCA останавливается, состоянием первой части LCA или состоянием второй части LCA.
[0134] Вслед за этим ЭБУ 10 поддержки вождения определяет, есть ли другое транспортное средство, которое аварийно приближается к собственному транспортному средству (другое транспортное средство, которое может столкнуться с собственным транспортным средством), когда собственное транспортное средство выполняет смену полосы по целевой траектории на основе информации о периферии, полученной датчиком 11 периферии. В этом случае, подобно этапу S17, ЭБУ 10 поддержки вождения вычисляет время ТТС столкновения и определяет, есть ли транспортное средство, которое аварийно приближается к собственному транспортному средству. В качестве порогового значения определения, ЭБУ 10 поддержки вождения использует пороговое значение ТТС2 второй части. То есть, когда время ТТС столкновения равно или больше порогового значения ТТС2 второй части, ЭБУ 10 поддержки вождения определяет «нет приближающегося транспортного средства», а когда время ТТС столкновения меньше порогового значения ТТС2 второй части. ЭБУ 10 поддержки вождения определяет «приближение транспортного средства» в качестве результата контроля периферии.
[0135] Пороговое значение ТТС2 второй части установлено на меньшее значение, чем пороговое значение TTC1 первой части. Например, пороговое значение ТТС2 второй части устанавливается на две секунды. Соответственно, в состоянии второй части LCA, ЭБУ 10 поддержки вождения определяет «приближение транспортного средства» в случае обнаружения другого транспортного средства с более высоким уровнем приближения, чем в состоянии первой части LCA.
[0136] Когда результатом контроля периферии является «отсутствует приближающееся транспортное средство» на этапе S19, ЭБУ 10 поддержки вождения переходит к процессу на этапе S20 и определяет, выполняется ли условие завершения LCA. В варианте осуществления условие завершения LCA выполняется, когда поперечное положение у собственного транспортного средства достигает конечного целевого поперечного положения у*. В случае, когда условие завершения LCA не выполняется, ЭБУ 10 поддержки вождения возвращает процесс на этап S15 и повторяет процессы вышеописанных этапов S15-S20 в заранее заданном вычислительном цикле. Таким образом, LCA продолжается.
[0137] Во время выполнения LCA вычисляется величина целевого поперечного состояния (у*, vy*, ау*) в зависимости от истекшего времени t. Кроме того, целевое значение (θу*, γ*, Cu*) состояния отклонения от курса вычисляется на основе расчетного значения (у*, vy*, ау*) целевого поперечного состояния и скорости v транспортного средства, а целевая регулируемая переменная (θlca*) вычисляется на основе рассчитанного значения (θу*, γ*, Cu*) целевого состояния отклонения от курса. Всякий раз, когда вычисляется целевая регулируемая переменная (θlca*), команда рулевого управления, обозначающая целевую регулируемую переменную (θlca*), посылается на ЭБУ 20 ЭПР. Таким образом, собственное транспортное средство перемещается по целевой траектории.
[0138] Когда положение перемещения собственного транспортного средства смещается с предыдущей полосы на целевую полосу во время выполнения LCA, информация относительно полосы транспортного средства (Cu, Dy, θу), поступающая от датчика 12 камеры на ЭБУ 10 поддержки вождения, переключается с информации относительно предыдущей полосы транспортного средства на информацию относительно целевой полосы транспортного средства. Поэтому невозможно использовать функцию у (t) целевой траектории, вычисленную в момент запуска LCA, без изменений. Когда полоса, где находится собственное транспортное средство, меняется, знак бокового отклонения Dy меняется на обратный. Соответственно, когда ЭБУ 10 поддержки вождения распознает переключение знака (положительного или отрицательного) бокового отклонения Dy, который должен выводиться датчиком 12 камеры, ЭБУ 10 поддержки вождения смещает функцию у (t) целевой траектории на ширину W предыдущей полосы. Таким образом, можно преобразовать функцию у (t) целевой траектории, вычисленную на основе центральной линии CL предыдущей полосы, в функцию у (t) целевой траектории на основе центральной линии CL целевой полосы.
[0139] В случае, когда ЭБУ 10 поддержки вождения определяет, что на этапе S20 выполняется условие завершения LCA, ЭБУ 10 поддержки вождения устанавливает режим поддержки рулевого управления в режим LTA - ВКЛ на этапе S21. То есть, ЭБУ 10 поддержки вождения заканчивает LCA и перезапускает LTA. Таким образом, рулевое управление выполняется таким образом, что собственное транспортное средство перемещается вдоль центральной линии CL целевой полосы. После того, как ЭБУ 10 поддержки вождения устанавливает режим поддержки рулевого управления в режим LTA-ВКЛ на этапе S21, ЭБУ 10 поддержки вождения возвращает процесс на этап S11 и продолжает описанную выше процедуру поддержки рулевого управления.
[0140] Когда LCA завершается, и режим поддержки рулевого управления установлен в положение LTA-ВКЛ, экран, который будет отображаться на устройстве 31 отображения, переключается с экрана 31b LCA на экран 31а LTA, как показано на фиг. 8.
[0141] ЭБУ 10 поддержки вождения посылает команду на мигание светового сигнала 32 для направления действия мигающего светового сигнала на ЭБУ 30 измерителя в период от запуска LCA до конца процедуры поддержки рулевого управления. Световой сигнал 32 мигает в результате команды на мигание, отправляемой из ЭБУ 40 рулевого управления в связи с установкой рычага 41 управления мигающим световым сигналом в первое положение P1L (P1R) хода перед запуском LCA. Даже когда команда на мигание, которая должна быть отправлена из ЭБУ 40 рулевого управления, останавливается, ЭБУ 30 измерителя продолжает мигание светового сигнала 32, пока команда на мигание посылается из ЭБУ 10 поддержки вождения.
[0142] Далее будет описан случай, когда результатом контроля периферии на этапе S17 является «приближение транспортного средства» в состоянии первой части LCA. В случае, когда результатом мониторинга периферии является «приближение транспортного средства» в состоянии первой части LCA, ЭБУ 10 поддержки вождения переходит к этапу S30 и выполняет управление отменой LCA. Фиг. 6 представляет собой блок-схему, показывающую процедуру управления отменой LCA, что является процессом этапа S30.
[0143] В состоянии первой части LCA собственное транспортное средство находится на предыдущей полосе. Таким образом, когда собственное транспортное средство не выезжает на целевую полосу, другое транспортное средство (приближающееся транспортное средство) не приближается аварийно к собственному транспортному средству. Соответственно, в процедуре управления отменой LCA выполняется следующий процесс таким образом, чтобы собственное транспортное средство не выезжало на целевую полосу.
[0144] Сначала, на этапе S31 ЭБУ 10 поддержки вождения устанавливает режим поддержки рулевого управления в состояние управления отменой LCA. Когда режим поддержки рулевого управления установлен в состояние управления отменой LCA, LCA завершается.
[0145] Затем на этапе S32, ЭБУ 10 поддержки вождения вычисляет целевую траекторию для перемещения собственного транспортного средства из текущего положения (положения собственного транспортного средства в тот момент, когда установлено состояние управления отменой LCA), в центральное положение предыдущей полосы в направлении ширины предыдущей полосы (далее называемой просто центральным положением). Далее целевая траектория именуется целевая траектория возврата по центру. Функция у (t), показанная в выражении (2), также используется для целевой траектории возврата по центру. Функция, выражающая целевую траекторию возврата по центру, называется функцией (t) целевой траектории возврата по центру. При вычислении функции у (t) целевой траектории возврата по центру, для определения коэффициентов с0, c1, с2, с3, с4, с5 функции у (t), показанной в выражении (2), параметры вычисления целевой траектории возврата по центру устанавливаются следующим образом. Параметрами вычисления целевой траектории возврата по центру являются следующие семь параметров (P11 - P17).
Р11. Поперечное положение собственного транспортного средства в текущий момент времени (времени, когда установлено состояние управления отменой LCA).
Р12. Поперечная скорость собственного транспортного средства в текущий момент времени (в то время, когда установлено состояние управления отменой LCA).
Р13. Поперечное ускорение собственного транспортного средства в текущий момент времени (времени, когда установлено состояние управления отменой LCA).
Р14. Целевое поперечное положение (центральное положение предыдущей полосы в варианте осуществления, в дальнейшем именуемое целевым поперечным положением завершения возврата по центру), которое является целевым значением поперечного положения для перемещения собственного транспортного средства.
Р15. Поперечная целевая скорость (именуемая поперечной целевой скоростью завершения возврата по центру) собственного транспортного средства, когда собственное транспортное средство перемещается в целевое поперечное положение завершения возврата по центру.
Р16. Поперечное целевое ускорение (называемое целевым поперечным ускорением завершения возврата по центру) собственного транспортного средства, когда собственное транспортное средство перемещается в целевое поперечное положение завершения возврата по центру.
Р17. Целевое время (называемое целевым временем возврата по центру), которое является целевым значением времени, необходимого для перемещения собственного транспортного средства из текущего положения в целевое поперечное положение возврата по центру.
[0146] При этом поперечное положение собственного транспортного средства в текущий момент времени (время, когда установлено состояние управления отменой LCA) обозначено ycancel, поперечная скорость в текущий момент времени обозначена vycancel, поперечное ускорение в текущий момент времени обозначено aycancel, время, когда режим поддержки рулевого управления установлен в состояние управления отменой LCA, вновь установлено на t=0, а целевое время возврата по центру обозначено tcancel. Параметры вычисления целевой траектории возврата по центру устанавливаются на у(0)=ycancel, у'(0)=vycancel, у''(0)=aycancel, y(tcancel)=0, y'(tcancel)=0 и y''(tcancel)=0.
[0147] Поперечное положение ycancel, поперечная скорость vycancel и поперечное ускорение aycancel являются значениями измерения в текущий момент времени и могут быть вычислены тем же способом, что и описанный выше способ для оценки исходного значения поперечного состояния. То есть, поперечное положение ycancel представляет собой боковое отклонение Dy в текущий момент времени. Поперечная скорость vycancel оценивается, исходя из скорости v транспортного средства в текущий момент времени и угла θу отклонения от курса в текущий момент времени (vycancel=v⋅sin(θy)). Поперечное ускорение aycancel представляет собой значение (v⋅у), полученное в результате умножения скорости γ отклонения от курса в текущий момент времени на скорость v транспортного средства в текущий момент времени. Кроме того, у (tcancel) устанавливается в целевое поперечное положение завершения возврата по центру, то есть в центральное положение предыдущей полосы. Как y'(tcancel), выражающую целевую поперечную скорость завершения возврата по центру, так и y''(tcancel), выражающую поперечное целевое ускорение завершения возврата по центру, устанавливают на ноль.
[0148] Целевое время tcancel возврата по центру вычисляют с помощью следующего выражения (18), используя постоянную ACancel установки целевого времени, установленную на аналогичное значение с постоянной А установки времени, которая используется, когда целевое время tlen смены полосы вычисляется в момент запуска LCA.

Здесь DCancel является необходимым расстоянием для перемещения собственного транспортного средства в поперечном направлении от поперечного положения собственного транспортного средства в то время, когда режим поддержки рулевого управления устанавливается в состояние управления отменой LCA, в целевое поперечное положение завершения возврата по центру (центральное положение предыдущей полосы). В состоянии управления отменой LCA нет чрезвычайной ситуации, поскольку собственное транспортное средство находится на предыдущей полосе. Соответственно, скорость движения собственного транспортного средства в поперечном направлении может быть аналогична этому же в LCA. Соответственно, постоянная ACancel установки целевого времени устанавливается на значение аналогичное постоянной А установки времени при выполнении LCA.
[0149] Основываясь на заданных значениях параметров вычисления целевой траектории возврата по центру, ЭБУ 10 поддержки вождения вычисляет значения коэффициентов c0, c1, с2, с3, с4, с5 функции y(t), выраженные выражением (2), тем же способом, что и на этапе S14. Затем ЭБУ 10 поддержки вождения подставляет вычисленные значения коэффициентов c0, c1, с2, с3, с4, с5 в выражение (2) и, соответственно, вычисляет функцию y(t) целевой траектории возврата по центру.
[0150] На этапе S32, в то же самое время, что и вычисление функции целевой траектории возврата по центру, ЭБУ 10 поддержки вождения уведомляет водителя об отмене (досрочной остановке) LCA. Например, ЭБУ 10 поддержки вождения приводит в действие устройство 13 звуковой сигнализации, чтобы генерировать звуковой сигнал уведомления (например, два звуковых сигнала), и отправляет команду уведомления об отмене LCA на ЭБУ 30 измерителя. Когда ЭБУ 30 измерителя принимает команду уведомления об отмене LCA, ЭБУ 30 измерителя отображает экран 31 с отменой LCA на устройстве 31 отображения, как показано на фиг. 11. На экране 31 с отменой LCA, траектория Z (см. фиг. 8) ярко отображается до тех пор, пока это время не будет затемнено или не будет стерто. Таким образом, водитель распознает завершение LCA. Экран 31 с отменой LCA отображается до тех пор, пока не завершится состояние управления отменой LCA.
[0151] Затем на этапе S33 ЭБУ 10 поддержки вождения выполняет рулевое управление на основе функции y(t) целевой траектории возврата по центру, вычисленной на предыдущем этапе S32. В этом случае ЭБУ 10 поддержки вождения переустанавливает таймер t (сбрасывает таймер t до нуля и затем запускает таймер t) и вычисляет величину состояния целевого поперечного движения (у*, vy*, ау*) и величину состояния целевого отклонения от курса (θу*, γ*, Cu*) от времени t истекшего после того, как режим поддержки рулевого управления установлен в состояние управления отменой LCA и функцию у (t) целевой траектории возврата по центру, аналогично этапу S15, для вычисления конечного целевого угла θCancel* поворота руля. Например, целевой угол θCancel* поворота руля можно вычислить аналогично θlca*, заменив левую часть выражения (15) наθCancel*.
[0152] После того, как ЭБУ 10 поддержки вождения вычисляет целевую регулируемую переменную (целевой угол θCancel* поворота руля), ЭБУ 10 поддержки вождения посылает команду рулевого управления, задающую целевую регулируемую переменную, на ЭБУ 20 ЭПР. В варианте осуществления ЭБУ 10 поддержки вождения вычисляет целевой угол θCancel* поворота руля в качестве целевой регулируемой переменной. Однако ЭБУ 10 поддержки вождения может вычислять целевой крутящий момент, который задает целевой угол θCancel* поворота руля, и может посылать команду рулевого управления, задающую целевой крутящий момент, на ЭБУ 20 ЭПР.
[0153] Затем на этапе S34 ЭБУ 10 поддержки вождения определяет, выполнено ли условие окончания состояния управления отменой LCA. В этом случае ЭБУ 10 поддержки вождения определяет, что условие окончания состояния управления отменой LCA выполняется, когда ЭБУ 10 поддержки вождения распознает, что поперечное положение собственного транспортного средства достигло целевого поперечного положения завершения возврата по центру (центрального положения предыдущей полосы) с помощью вышеуказанного рулевого управления. В качестве альтернативы, ЭБУ 10 поддержки вождения может определить, что условие окончания состояния управления отменой LCA выполняется, когда ЭБУ 10 поддержки вождения распознает, что состояние управления отменой LCA продолжается в течение определенного заранее заданного времени (например, целевого времени tcancel возврата по центру или времени, которое является заранее заданным временем, которое больше, чем целевое время tcancel возврата по центру).
[0154] В случае, когда ЭБУ 10 поддержки вождения определяет, что условие окончания состояния управления отменой LCA не выполняется (S34: Нет), ЭБУ 10 поддержки вождения возвращает процесс на этап S33. Соответственно, рулевое управление выполняется до тех пор, пока не будет удовлетворено условие окончания состояния управления отменой LCA. Таким образом, собственное транспортное средство перемещается в центральное положение на предыдущей полосе.
[0155] Когда условие окончания состояния управления отменой LCA выполняется в результате повторения процессов, ЭБУ 10 поддержки вождения заканчивает процедуру управления отменой LCA и переходит к процессу на этапе S21 основной процедуры (процедуры поддержки рулевого управления). Таким образом, режим поддержки рулевого управления переключается из состояния управления отменой LCA в режим LCA - ВКЛ. Функциональный блок ЭБУ 10 поддержки вождения, который выполняет процедуру управления отменой LCA, может исполнять назначение блока поддержки управления возврата по центру в соответствии с изобретением.
[0156] На Фиг. 14 показана целевая траектория возврата по центру, когда собственное транспортное средство С1 приближается к другому транспортному средству С2, которое перемещается по целевой полосе в состоянии первой части LCA.
[0157] Далее будет описан случай, когда результатом контроля периферии на этапе S19 является «приближение транспортного средства» в состоянии второй части LCA (S19: нет). В случае, когда результатом контроля периферии является «приближение транспортного средства» в состоянии второй части LCA, ЭБУ 10 поддержки вождения переходит к процессу на этапе S40 и выполняет LCA управление предупреждения о приближении. На фиг. 7 представляет собой блок-схему, показывающую процедуру LCA управления предупреждения о приближении, которая является процессом этапа S40.
[0158] Когда результат контроля периферии в состоянии первой части LCA заключается в том, что «отсутствует приближающееся транспортное средство», обычно не определяется приближающееся транспортное средство в состоянии второй части LCA. Однако во время выполнения LCA может возникнуть случай, когда другое транспортное средство С2 быстро приближается к собственному транспортному средству C1 сзади на целевой полосе с неожидаемой относительной скоростью, как показано на фиг. 16, случай, когда другое транспортное средство C3 выезжает на целевую полосу с полосы, которая является следующей смежной к целевой полосе (полоса, которая находится в двух полосах от предыдущей полосы) и аварийно сближается с собственным транспортным средством C1 и тому подобное. Кроме того, может возникнуть ситуация, когда другое транспортное средство в слепой зоне датчика 11 периферии аварийно сближается с собственным транспортным средством.
[0159] Соответственно, при LCA управлении предупреждения о приближении на этапе S40 в дополнение к предупреждению для водителя, происходит процесс изменения движения собственного транспортного средства за короткое время, при этом собственное транспортное средство не перемещается в сторону центра по ширине целевой траектории и выполняет поддержку для предотвращения столкновения с другим транспортным средством.
[0160] Когда запускается процедура LCA управления предупреждения о приближении на этапе S40, ЭБУ 10 поддержки вождения устанавливает режим поддержки рулевого управления в состояние LCA управление предупреждения о приближении на этапе S41. Когда режим поддержки рулевого управления установлен в состояние LCA управления предупреждения о приближении, LCA завершается.
[0161] Затем на этапе S42 ЭБУ 10 поддержки вождения вычисляет целевую траекторию возврата угла отклонения от курса для возврата угла отклонения от курса собственного транспортного средства к состоянию непосредственно перед запуском LCA.
[0162] Здесь будет описана целевая траектория возврата угла отклонения от курса. Целевая траектория возврата угла отклонения от курса означает целевую траекторию для регулировки угла отклонения от курса собственного транспортного средства до нуля за максимально короткое время, что не создаст проблем с обеспечением устойчивости транспортного средства (другими словами, целевой траектории для корректировки поперечной скорости собственного транспортного средства в направлении смены полосы движения до нуля за время, которое является как можно более коротким, и это не создает проблем с обеспечением устойчивости транспортного средства). Непосредственно перед запуском LCA, выполняется LTA. Соответственно, при запуске LCA угол отклонения от курса оценивается как значение, близкое к нулю. Соответственно, ЭБУ 10 поддержки вождения вычисляет целевую траекторию возврата угла отклонения от курса для отмены целевой поперечной скорости vy*, вычисленной из функции целевой траектории в LCA (корректировки целевой поперечной скорости vy* до нуля), возвращая угол отклонения от курса, сгенерированный в LCA, до состояния непосредственно перед запуском LCA.
[0163] Вышеописанная целевая траектория в LCA означает целевое поперечное положение с учетом времени, истекшего от времени запуска LCA. С другой стороны, целевая траектория возврата угла отклонения от курса означает целевую кривизну относительно времени, истекшего с момента времени, когда приближающееся транспортное средство определяется в состоянии второй части LCA. Целевая регулируемая переменная, которая должна быть в конечном итоге выведена на ЭБУ 20 ЭПР, устанавливается на значение, полученное в результате умножения суммы целевой кривизны и кривизны (кривизны изгиба полосы), определенной датчиком 12 камеры, посредством коэффициента усиления регулирования (который является коэффициентом для преобразования кривизны в угол поворота руля и может быть вышеописанным коэффициентом Klca1 усиления регулирования).
[0164] Здесь будет описан способ возврата угла отклонения от курса в состояние непосредственно перед запуском LCA. Целевая регулируемая переменная в LCA представлена целевым углом θlca*рулевого управления. Как видно из приведенного выше выражения (15), целевой угол θlca* поворота руля включает в себя прогнозируемый регулируемый элемент (Klca1⋅Cu*), вычисленный из целевой кривизны Cu*.
[0165] Изменение целевой кривизны соответствует изменению угла поворота руля и может рассматриваться как изменение угла отклонения от курса. Соответственно, в случае обнаружения приближающегося транспортного средства в состоянии второй части LCA, можно вернуть угол отклонения от курса к состоянию непосредственно перед запуском LCA, вычислив интегрированное значение целевой кривизны Cu * в период от запуска LCA до обнаружения приближающегося транспортного средства, и после замены знака на противоположный, выводя регулируемую переменную, соответствующую интегрированному значению целевой кривизны Cu*, на ЭБУ 20 ЭРУ.
[0166] Например, как показано на фиг. 12, в случае, когда приближающееся транспортное средство определяется в момент t1 времени, интегрированное значение целевой кривой Cu* от момента t0 времени, когда запускается LCA, до момента t1 времени, соответствует площади заштрихованного участка на фигуре. Соответственно, путем замены знака на противоположный прогнозируемой регулируемой переменной, соответствующей области (изменяя на противоположное направление вправо-влево) и подавая команду на ЭБУ 20 ЭПР, можно вернуть угол отклонения от курса в состояние непосредственно перед запуском LCA, в момент времени, когда вывод прогнозируемой регулируемой переменной завершен. Значение, полученное в результате замены знака на противоположный (положительного или отрицательного) интегрированного значения целевой кривизны Cu* от момента t0 времени до момента t1 времени, называется обратным интегрированным значением. Добавляя обратное интегрированное значение к интегрированному значению целевой кривизны Cu* с момента t0 времени до момента t1 времени, можно отрегулировать интегрированное значение целевой кривизны Cu* от начала LCA до нуля.
[0167] В случае обнаружения приближающегося транспортного средства (другого транспортного средства, которое может аварийно приблизиться к собственному транспортному средству на целевой полосе) в состоянии второй части LCA, собственное транспортное средство находится в аварийной ситуации, поскольку существует высокая вероятность того, что часть собственного транспортного средства въехала на целевую полосу. Соответственно, необходимо вернуть угол отклонения от курса к нулю и установить собственное транспортное средство в направлении, параллельном тому, в котором пролегает полоса, в как можно более короткое время. В то же время система управления поддержки рулевого управления определяет верхнее значение величины поперечного ускорения транспортного средства (которое является поперечным ускорением для воздействия на транспортное средство и отличается от поперечного ускорения в направлении ширины полосы) и верхний предел величины скорости изменения, на которую может быть изменено поперечное ускорение (верхний предел величины изменения поперечного ускорения в единицу времени).
[0168] Соответственно, ЭБУ 10 поддержки вождения вычисляет целевую кривизну Cuemergency* после t1 времени, как показано жирной линией на фиг. 12. Целевая кривизна Cuemergency* вычисляется с использованием максимального значения (Cumax) и максимального градиента (Cu'max) изменения. Максимальное значение (Cumax) устанавливается на верхний предел поперечного ускорения транспортного средства, который разрешен в системе управления поддержки рулевого управления. Максимальный градиент (Cu'max) изменения означает градиент изменения, при котором целевая кривизна Cuemergency* увеличивается до максимального значения Cumax и градиент изменения, при котором целевая Cuemergency* уменьшается с максимального значения Cumax до нуля. Максимальный градиент (Cu'max) изменения устанавливается на верхний предел, который разрешен в системе поддержки рулевого управления. Например, максимальное значение Cumax устанавливается на значение, при котором поперечное ускорение транспортного средства составляет 0,2 G (G: ускорение гравитации). Поперечное ускорение YG, действующее на транспортное средство, может быть рассчитано, как значение (YG=v2⋅Cu), получаемое в результате умножения квадрата (v2) скорости транспортного средства на кривизну (Cu). Соответственно, из этого выражения отношения можно оценить максимальное значение Cumax. Знаки максимального значения Cumax и максимального градиента Cu'max изменения определяются знаком обратного интегрированного значения.
[0169] ЭБУ 10 поддержки вождения вычисляет целевую кривизну Cuemergency* относительно времени t, истекшего от момента времени (момента t1 времени на фиг. 12), когда обнаружено приближающееся транспортное средство, на основе величины обратного интегрированного значения., максимального значения Cumax целевой кривизны и максимального градиента Cu'max изменения целевой кривизны. Далее целевая кривизна Cuemergency* относительно истекшего времени t также именуется функцией Cuemergency* (t) целевой кривизны. Функция Cuemergency*(t) целевой кривизны определяет целевую траекторию собственного транспортного средства. Соответственно, функция Cuemergency* (t) целевой кривизны соответствует целевой траектории возврата угла отклонения от курса.
[0170] Обратное интегрированное значение может быть рассчитано путем интегрирования целевой кривизны Cu* и замены на противоположный знака интегрированного значения, когда целевая кривизна Cu* вычисляется во время выполнения LCA. Однако в варианте осуществления обратное интегрированное значение рассчитывается следующим образом.
[0171] Целевая кривизна Cu* в LCA может быть выражена следующим выражением (19) с использованием целевого поперечного ускорения ау* и скорости v транспортного средства.

Соответственно, значение, полученное в результате интегрирования целевой кривизны Cu * с момента t0 времени (т.е., истекшее время t=0) до момента t11 времени (то есть, истекшее время t=t1), может быть выражено следующим выражением (20), с использованием скорости v транспортного средства и целевой поперечной скорости vy*. Выражение (20) основано на предположении, что скорость v транспортного средства можно считать постоянной при выполнении LCA.
[0172] [Формула 1]
Соответственно, обратное интегрированное значение рассчитывается путем замены на противоположный знака совокупного значения, полученного из выражения (20). Как описано выше, когда вычисляется обратное интегрированное значение, можно вычислить целевую кривизну Cuemergency* относительно времени t, истекшего от момента времени, когда обнаружено приближающееся транспортное средство, на основе величины обратного интегрированного значения, максимального значения Cumax целевой кривизны и максимального градиента Cu'max изменения целевой кривизны. Таким образом, ЭБУ 10 поддержки вождения вычисляет целевую кривизну Cuemergency* для возврата к нулю совокупного значения целевой кривизны Cu * с запуском LCA в течение кратчайшего времени при ограничении с помощью максимального значения Cumax и максимального градиента Cu'max изменения.
[0173] Описание расчета траектории возврата угла отклонения от курса (целевой кривизны Cuemergency (* (t)) было сделано выше.
[0174] На этапе S42 в то же время, что и вычисление целевой траектории возврата угла отклонения от курса, ЭБУ 10 поддержки вождения выдает предупреждение для информирования водителя о досрочной остановке LCA и об обнаружении приближающегося транспортного средства. Например, ЭБУ 10 поддержки вождения приводит в действие устройство 13 звуковой сигнализации для генерирования предупреждающего звукового сигнала (например, четыре звуковых сигнала) и отправляет предупредительную команду LCA о приближении на ЭБУ 30 измерителя. Предупреждающий звуковой сигнал подается таким образом, чтобы уровень внимания был наивысшим.
[0175] Когда ЭБУ 30 измерителя принимает команду LCA предупреждения о приближении, ЭБУ 30 измерителя отображает экран 31d LCA предупреждения о приближении на устройстве 31 отображения, как показано на фиг. 13. На экране 31d LCA предупреждения о приближении отображается траектория Z (см. фиг. 8) до тех пор, пока это время не будет удалено, и появится предупреждающая метка GA, чтобы она моргала параллельно изображению GWL белой линии сбоку (с правой стороны, в этом примере) в направлении смены полосы, рядом с изображением GWL белой линии. При звучании устройства 13 звуковой сигнализации и экране 31d LCA предупреждения о приближении, отображаемого на устройстве 31 отображения, водитель может определить, что LCA досрочно остановлено, и что другое транспортное средство аварийно сближается с собственным транспортным средством на целевой полосе. В этом случае предупреждающее сообщение может генерироваться голосовым сообщением. Кроме того, предупреждение может быть выдано водителю вибрацией вибратора (не показан). Экран 31d LCA предупреждения о приближении продолжает отображаться до тех пор, пока не будет выполнено условие окончания LCA управления предупреждения о приближении.
[0176] Затем на этапе S43 процедуры, показанной на фиг. 7, ЭБУ 10 поддержки вождения выполняет рулевое управлением на основе функции целевой кривизны Cuemergency* (t), вычисленной на предыдущем этапе S42. В этом случае ЭБУ 10 поддержки вождения сбрасывает таймер t (сбрасывает таймер t до нуля, а затем запускает таймер t) и вычисляет целевую кривизну Cuemergency* в текущий момент времени, исходя из времени t, истекшего с момента времени, когда приближающееся транспортное средство было определено в состоянии второй части LCA и функции Cuemergency* (t) целевой кривизны. ЭБУ 10 поддержки вождения вычисляет целевой θemergency* угол поворота руля в текущий момент времени, исходя из целевой кривизны Cuemergency* и кривизны Cu, определенной датчиком 12 камеры в текущий момент времени. Целевой угол θemergency* поворота руля рассчитывается путем умножения суммы целевой кривизны Cuemergency* в текущий момент времени и кривизны Cu, определенной датчиком 12 камеры, на коэффициент Klca1 усиления регулирования, как показано в следующем выражении (21),

[0177] ЭБУ 10 поддержки вождения посылает команду рулевого управления, обозначающую целевой угол θemergency* поворота руля, на ЭБУ 20 ЭПР, всякий раз, когда ЭБУ 10 поддержки вождения вычисляет целевой угол θemergency* поворота руля. Когда ЭБУ 20 ЭПР принимает команду рулевого управления, ЭБУ 20 ЭПР приводит в действие и управляет двигателем 22 рулевого управления, так что угол поворота руля следует за целевым углом θemergency* поворота руля. В варианте осуществления, ЭБУ 10 поддержки вождения вычисляет целевой угол θemergency* поворота руля в качестве целевой регулируемой переменной. Однако ЭБУ 10 поддержки вождения может вычислять целевой крутящий момент, который обеспечивает целевой угол θemergency* поворота руля, и может посылать команду рулевого управления, обозначающую целевой крутящий момент, на ЭБУ 20 ЭПР.
[0178] Далее рулевое управление с использованием целевого угла θemergency* поворота руля называется управлением возвратом угла отклонения от курса. При управлении возвратом угла отклонения от курса, угол поворота руля управляется только прогнозируемым элементом управления с использованием суммы целевой кривизны Cuemergency* и кривизны Cu, определенной датчиком 12 камеры. То есть, регулирование с обратной связью с использованием угла θу отклонения от курса, определенного датчиком 12 камеры, не выполняется.
[0179] ЭБУ 10 поддержки вождения может удерживать значение регулируемой переменной с обратной связью (второй-пятый элементы в правой части выражения (15)), вычисленное непосредственно перед моментом времени (времени t1) обнаружения приближающегося транспортного средства, и может добавлять удерживаемое значение (фиксированное значение) в правую часть выражения (21) в качестве части прогнозируемой регулируемой переменной, во время управления возвратом угла отклонения от курса.
[0180] Затем, на этапе S44, ЭБУ 10 поддержки вождения определяет, завершено ли управление возвратом угла отклонения от курса. Управление возвратом угла отклонения от курса завершается в момент времени, когда целевая кривизна Cuemergency* становится равной нулю (в момент t2 времени на фиг. 12). Когда управление возвратом угла отклонения от курса не завершено, ЭБУ 10 поддержки вождения возвращает процесс на этап S43 и выполняет те же процессы. Процессы повторяются с заранее заданным вычислительным циклом, и, таким образом, угол отклонения от курса уменьшается с высокой скоростью.
[0181] Угол отклонения от курса изменяется также в случае, когда собственное транспортное средство возвращается в центральное положение на предыдущей полосе с помощью управления отменой LCA. Однако, в случае управления возвратом угла отклонения от курса, угол отклонения от курса уменьшается с большей скоростью (то есть, с чрезвычайной скоростью), чем скорость изменения при управлении отменой LCA, из-за установки максимального значения Cumax целевой кривизны и максимального градиента Cu'max изменения.
[0182] Когда управление возвратом угла отклонения от курса завершено в результате повторения процессов (S44: Да), ЭБУ 10 поддержки вождения переходит к этапу S45. В этот момент времени угол отклонения от курса был уменьшен почти до нуля. То есть, поперечная скорость собственного транспортного средства почти равна нулю. Соответственно, можно предотвратить перемещение собственного транспортного средства в сторону центра по ширине полосы, и можно помочь избежать столкновения с приближающимся транспортным средством. Функциональный блок ЭБУ 10 поддержки вождения, который выполняет управление возвратом угла отклонения от курса (S42-S44), может исполнять назначение блока поддержки управления предотвращением столкновения в изобретении.
[0183] На этапе S45 ЭБУ 10 поддержки вождения вычисляет целевую траекторию для перемещения собственного транспортного средства из текущего положения (положение собственного транспортного средства в момент завершения управления возвратом угла отклонения от курса) в центральное положение на предыдущей полосе. В дальнейшем целевая траектория именуется целевой траекторией возврата на предыдущую полосу. Функция y(t), показанная в выражении (2), также используется для предыдущей целевой траектории возврата. Функция, выражающая целевую траекторию возврата на предыдущую полосу, называется целевой функцией y(t) траектории возврата на предыдущую полосу. При вычислении целевой функции y(t) траектории возврата на предыдущую полосу для определения коэффициентов c0, c1, с2, с3, с4, с5 функции y(t), указанной в выражении (2), параметры вычисления целевой траектории возврата на предыдущую полосу устанавливаются следующим образом. Параметры вычисления целевой траектории возврата на предыдущую полосу являются следующие семь параметров (Р21-Р27).
Р21. Поперечное положение собственного транспортного средства в текущий момент времени (времени, когда управление возвратом угла отклонения от курса завершено)
Р22. Поперечная скорость собственного транспортного средства в текущий момент времени (времени, когда управление возвратом угла отклонения от курса завершено).
Р23. Поперечное ускорение собственного транспортного средства в текущий момент времени (времени, когда управление возвратом угла отклонения от курса завершено).
Р24. Целевое поперечное положение (центральное положение предыдущей полосы в варианте осуществления, в дальнейшем именуемое целевым поперечным положением завершения возврата на предыдущую полосу), которое является целевым значением поперечного положения для перемещения собственного транспортного средства.
Р25. Целевая поперечная скорость (именуемая целевой поперечной скоростью завершения возврата на предыдущую полосу) собственного транспортного средства, когда собственное транспортное средство перемещается в целевое поперечное положение завершения возврата на предыдущую полосу.
Р26. Целевое поперечное ускорение (называемое целевым поперечным ускорением завершения возврата на предыдущую полосу) собственного транспортного средства, когда собственное транспортное средство перемещается в целевое поперечное положение завершения возврата на предыдущую полосу.
Р27. Целевое время (называемое целевым временем возврата на предыдущую полосу), которое является целевым значением времени, необходимым для перемещения собственного транспортного средства из текущего положения до целевого поперечного положения завершения возврата на предыдущую полосу.
[0184] Здесь поперечное положение собственного транспортного средства в текущий момент времени (времени, когда управление возвратом угла отклонения от курса завершено) обозначено yreturn, поперечная скорость в текущий момент времени обозначена vyreturn, поперечное ускорение в текущий момент времени обозначено ayreturn, время, когда управление возвратом угла отклонения от курса завершено, вновь установлено на t=0, а целевое время возврата на предыдущую полосу обозначено treturn. Параметры вычисления целевой траектории для возврата на предыдущую полосу устанавливаются на у(0)=yreturn, у'(0)=vyreturn, у''(0)=ayreturn, y(treturn)=W (знак устанавливается в зависимости от направления изменения полосы), y'(treturn)=0 и y''(treturn)=0.
[0185] Поперечное положение yreturn, поперечная скорость vyreturn и поперечное ускорение ayreturn являются значениями измерения в текущий момент времени и могут быть вычислены тем же способом, что и описанный выше способ для оценки исходного значения поперечного состояния. То есть, поперечное положение yreturn представляет собой боковое отклонение Dy в текущий момент времени. Поперечная скорость vyreturn оценивается по скорости v транспортного средства в текущий момент времени и углу θу отклонения от курса в текущий момент времени (vyreturn=v⋅sin(θy)). Поперечное ускорение ayreturn представляет собой значение (v⋅γ), полученное в результате умножения скорости γ отклонения от курса в текущий момент времени на скорость v транспортного средства в текущий момент времени. Кроме того, y(treturn) устанавливается на целевое поперечное положение завершения возврата на предыдущую полосу, то есть центральное положение предыдущей полосы. На этом основании, в случае, когда датчик 12 камеры выводит информацию о полосе, касающуюся предыдущей полосы в момент времени, когда управление возвратом угла отклонения от курса завершено, y(treturn) устанавливается на ноль. Как y'(treturn), обозначающее целевую поперечную скорость завершения возврата на предыдущую полосу, так и y''(treturn), обозначающее целевое поперечное ускорение завершения возврата на предыдущую полосу, устанавливаются на ноль.
[0186] Целевое время treturn возврата на предыдущую полосу вычисляется с помощью следующего выражения (22), используя постоянную Areturn установки целевого времени, установленную на аналогичное значение с постоянной А установки целевого времени, которая используется, когда целевое время tlen смены полосы вычисляется при запуске LCA.

Здесь Dreturn является необходимым расстоянием для перемещения собственного транспортного средства в поперечном направлении из поперечного положения собственного транспортного средства в то время, когда управление возвратом угла отклонения от курса завершено, к поперечному положению завершения возврата на предыдущую полосу (центральное положение предыдущей полосы). В момент времени, когда управление возвратом угла отклонения от курса завершено, предотвращается столкновение с другим транспортным средством. Соответственно, скорость перемещения положения собственного транспортного средства в поперечном направлении может быть аналогична скорости движения при LCA. Соответственно, постоянная Areturn установки целевого времени устанавливается на значение, аналогичное постоянной А установки целевого времени при выполнении LCA.
[0187] На основании заданных значений параметров вычисления целевой траектории возврата на предыдущую полосу ЭБУ 10 поддержки вождения вычисляет значения коэффициентов c0, c1, с2, с3, с4, с5 функции y(t), обозначенной выражением (2), тем же способом, что и на этапе S14. Затем ЭБУ 10 поддержки вождения подставляет вычисленные значения коэффициентов с0, c1, с2, с3, с4, с5 в выражение (2) и, тем самым, вычисляет функцию y(t) целевой траектории возврата на предыдущую полосу.
[0188] После того, как ЭБУ 10 поддержки вождения вычисляет функцию целевой траектории возврата на предыдущую полосу на этапе S45, ЭБУ 10 поддержки вождения переходит к этапу S46. На этапе S46 ЭБУ 10 поддержки вождения выполняет рулевое управление на основе функции целевой траектории возврата на предыдущую полосу, вычисленной на предыдущем этапе S45. В этом случае ЭБУ 10 поддержки вождения сбрасывает таймер t (сбрасывает таймер t на нуль и затем запускает таймер t) и вычисляет величину состояния целевого поперечного движения (у*, vy*, ау*) и величину состояния целевого отклонения от курса (θу*, γ*, Cu*) со времени t, истекшего от момента времени, когда управление возвратом угла отклонения от курса завершено, и функции y(t) целевой траектории возврата на предыдущую полосу, аналогично этапу S15, для вычисления конечного целевого угла θreturn* поворота руля. Например, целевой угол θreturn* поворота руля можно вычислить, заменив левую часть выражения (15) на θreturn*.
[0189] После того, как ЭБУ 10 поддержки вождения вычисляет целевую регулируемую переменную (целевой угол θreturn* поворота руля), ЭБУ 10 поддержки вождения посылает команду управления, обозначающую целевую регулируемую переменную, на ЭБУ 20 ЭПР. В варианте осуществления ЭБУ 10 поддержки вождения вычисляет целевой угол θreturn* поворота руля в качестве целевой регулируемой переменной. Однако ЭБУ 10 поддержки вождения может вычислять целевой крутящий момент, который задает целевой угол θreturn* поворота руля, и может посылать команду рулевого управления, обозначающую целевой крутящий момент, на ЭБУ 20 ЭПР.
[0190] Затем на этапе S47 ЭБУ 10 поддержки вождения определяет, удовлетворено ли конечное условие о состоянии LCA управления предупреждения о приближении. В этом случае ЭБУ 10 поддержки вождения определяет, что конечное условие о состоянии LCA управления предупреждения о приближении удовлетворено, когда ЭБУ 10 поддержки вождения определяет, что поперечное положение собственного транспортного средства достигло целевого поперечного положения завершения возврата на предыдущую полосу движения (центральное положение предыдущей полосы) с помощью рулевого управления на этапе S46. В качестве альтернативы, ЭБУ 10 поддержки вождения может определить, что конечное условие состояния LCA управления предупреждения о приближении удовлетворено, когда ЭБУ 10 поддержки вождения определяет, что состояние LCA управления предупреждения о приближении продолжается в течение определенного заранее заданного времени.
[0191] В случае, когда ЭБУ 10 поддержки вождения определяет, что конечное условие состояния LCA управления предупреждения о приближении не выполняется (S47: Нет), ЭБУ 10 поддержки вождения возвращает процесс на этап S46. Соответственно, рулевое управление на этапе S46 выполняется до тех пор, пока не будет удовлетворено конечное условие состояния LCA управления предупреждения о приближении. Таким образом, собственное транспортное средство перемещается в центральное положение предыдущей полосы.
[0192] Когда конечное условие состояния LCA управления предупреждения о приближении выполняется в результате повторения процессов, ЭБУ 10 поддержки вождения заканчивает процедуру LCA управления предупреждения о приближении и переходит к этапу S21 основной процедуры (процедуры поддержки рулевого управления). Таким образом, режим поддержки рулевого управления переключается из состояния LCA управления предупреждения о приближении в состояние LTA-ВКЛ. Функциональный блок ЭБУ 10 поддержки вождения, который выполняет процессы этапа S45 - этапа S47, может исполнять назначение блока поддержки управления возвратом на предыдущую полосу в изобретении.
[0193] На фиг. 15 показана целевая траектория возврата на предыдущую полосу, когда собственное транспортное средство С1 и другое транспортное средство С3 приближаются друг к другу в состоянии второй части LCA.
[0194] В вышеописанной системе поддержки рулевого управления в варианте осуществления, даже после того, как LCA запускается на основе контроля периферии, контроль периферии продолжается. В случае обнаружения приближающегося транспортного средства, LCA останавливается досрочно, и режим поддержки рулевого управления после этого времени переключается в зависимости от состояния выполнения смены полосы движения в это время. В случае, когда приближающееся транспортное средство распознается в первой части смены полосы, рулевое управление обеспечивается поддержкой таким образом, что собственное транспортное средство возвращается в центральное положение предыдущей полосы в направлении ширины предыдущей полосы. Таким образом, притом, что обеспечивается безопасность, собственное транспортное средство возвращается в предпочтительное положение для водителя. Соответственно, можно повысить удобство.
[0195] В случае обнаружения приближающегося транспортного средства во второй части смены полосы, предупреждение о приближении выдается водителю, и угол поворота руля регулируется таким образом, чтобы угол отклонения от курса собственного транспортного средства быстро возвращался в положение перед запуском LCA. Непосредственно перед запуском LCA выполняется LTA. Поэтому угол отклонения от курса уменьшается почти до нуля. Кроме того, при управлении возвратом угла отклонения от курса, угол поворота руля регулируется только с помощью прямого управления с использованием целевого угла θemergency* поворота руля, вычисленного на основе интегрированного значения целевой кривизны Cu *.
[0196] Управление возвратом угла отклонения от курса должно выполняться как можно быстрее. Например, в случае, когда угол поворота руля быстро изменяется с использованием значения измерения датчика 12 камеры, и когда значение измерения датчика 12 камеры является неправильным, угол поворота руля быстро изменяется в неправильном направлении, и водителем ощущается чувство дискомфорта. В случае, когда управление с обратной связью выполняется с использованием угла θу отклонения от курса, определенного датчиком 12 камеры, целевая регулируемая переменная устанавливается с обнаружением изменения в поведении транспортного средства, и, соответственно, генерируется задержка управления. Соответственно, в варианте осуществления угол отклонения от курса возвращается в состояние непосредственно перед запуском LCA посредством прямого управления на основе интегрированного значения целевой кривизны Cu* и, соответственно, можно быстро уменьшить угол отклонения от курса до нуля. Таким образом, за короткое время можно уменьшить поперечную скорость собственного транспортного средства. Соответственно, можно быстро предотвратить перемещение собственного транспортного средства в сторону центра по ширине целевой полосы, и можно помочь избежать столкновения с приближающимся транспортным средством (помочь уменьшить вероятность столкновения). Прогнозируемая регулируемая переменная включает в себя компонент (Klca1⋅Cu) кривизны Cu, обозначающий форму кривизны дороги. Однако этот компонент является регулируемой переменной для выполнения перемещения собственного транспортного средства по форме дороги, а изменение компонента чрезвычайно постепенное. Поэтому этот компонент не оказывает вредного влияния на управление возвратом угла отклонения от курса.
[0197] Когда управление возвратом угла отклонения от курса завершено, вычисляется целевая траектория возврата на предыдущую полосу для возврата собственного транспортного средства в центральное положение на предыдущей полосе, и угол поворота руля регулируется таким образом, что собственное транспортное средство перемещается по целевой траектории возврата на предыдущую полосу. Соответственно, можно вернуть собственное транспортное средство в положение, которое является еще более безопасным и которое является предпочтительным для водителя.
[0198] Что касается порогового значения времени ТТС столкновения, которое используется для определения того, приближается ли транспортное средство, пороговое значение ТТС2 второй части устанавливается на меньшее значение, чем пороговое значение TTC1 первой части. Поэтому в состоянии первой части LCA можно завершить LCA с достаточным временем в состоянии, в котором обеспечивается безопасность, в случае обнаружения другого транспортного средства, которое может прийти к аварийному приближению к собственному транспортному средству. С другой стороны, в состоянии второй части LCA можно предотвратить поддержку экстренных действий для предотвращения столкновений. Соответственно, можно предотвратить досрочную остановку LCA сверх необходимости, и можно повысить удобство.
[0199] Определение первой части и второй части смены полосы выполняется на основе бокового отклонения Dy, которое определяется датчиком 12 камеры, и может выполняться должным образом и легко. За счет переключения состояния выполнения смены полосы между первой частью и второй частью смены полосы движения в более ранний момент времени, прежде чем боковая поверхность собственного транспортного средства пересечет границу белой линии с учетом перерегулирования (расстояния в поперечном направлении, на которое собственное транспортное средство въедет на целевую полосу) из-за задержки ответа в управлении отменой LCA, можно выполнить более правильное переключение между состоянием управления отменой LCA и состоянием LCA управления предупреждения о приближении. В частности, устанавливая положение переключения первая-вторая часть (условие определения первая или вторая часть) с учетом поперечной скорости собственного транспортного средства, можно выполнить переключение между состоянием управления отменой LCA и состоянием LCA управления предупреждения о приближении более правильным образом.
[0200] Во время завершения состояния управления отменой LCA и времени окончания состояния LCA управления предупреждения о приближении, так же как и времени завершения LCA, целевая поперечная скорость и целевое поперечное ускорение собственного транспортного средства устанавливаются на ноль, и потому собственное транспортное средство может устойчиво перемещаться по центральной линии CL полосы продолжительное время.
Модификация 1
[0201] В варианте осуществления при управлении возвратом угла отклонения от курса упомянутое управление возвратом угла отклонения от курса в состояние непосредственно перед запуском LCA выполняется с использованием обратного интегрированного значения. Однако не всегда необходимо использовать обратное интегрированное значение. Например, на этапе S42 процедуры, показанной на фиг. 7, ЭБУ 10 поддержки вождения вычисляет целевой угол поворота руля для уменьшения угла отклонения от курса (абсолютного значения) с максимальным углом поворота руля, который допускается в системе поддержки рулевого управления. В этом случае, подобно вышеупомянутому варианту осуществления, ЭБУ 10 поддержки вождения может вычислять целевой угол поворота руля на основе максимального значения Cumax целевой кривизны и максимального градиента Cu'max изменения целевой кривизны. На этапе S43 ЭБУ 10 поддержки вождения передает команду управления, обозначающую целевой угол поворота руля, на ЭБУ 20 ЭПР.
[0202] Затем, на этапе S44, ЭБУ 10 поддержки вождения определяет, стал ли равным нулю угол θу отклонения от курса, определяемый датчиком 12 камеры, или был ли изменен на противоположный знак (положительный или отрицательный) угла θу отклонения от курса. Когда угол θу отклонения от курса становится равным нулю, или когда знак угла θу отклонения от курса был изменен на противоположный, ЭБУ 10 поддержки вождения определяет, что возврат угла отклонения от курса завершен (S44: Да). Предпочтительно применять модификацию 1 в случае, когда установлен датчик 12 камеры с высоким разрешением.
Модификация 2
[0203] В вышеприведенном варианте осуществления и модификации 1 в случае выполнения управления возвратом угла отклонения от курса, ЭБУ 10 поддержки вождения регулирует угол поворота руля, чтобы уменьшить угол отклонения от курса с чрезвычайной скоростью. Однако не всегда необходимо регулировать угол поворота руля. ЭБУ 10 поддержки вождения может генерировать разность тормозных усилий между правым и левым колесами, при этом собственное транспортное средство выполняет движение отклонения от курса и, тем самым, может уменьшать угол отклонения от курса с чрезвычайной скоростью. Например, ЭБУ 10 поддержки вождения может выполнять следующий процесс, вместо процессов этапов S42-S44, показанных на фиг. 7.
[0204] Когда ЭБУ 10 поддержки вождения устанавливает режим поддержки рулевого управления в состояние LCA управления предупреждения о приближении (S41), ЭБУ 10 поддержки вождения посылает команду управления возвратом угла отклонения от курса на ЭБУ 60 тормоза и выдает предупреждение водителю. Предупреждение для водителя такое же, что и процесс этапа S42 в варианте осуществления. Команда управления возвратом угла отклонения от курса включает в себя информацию о направлении возврата угла отклонения от курса. ЭБУ 60 тормоза формирует разность тормозных усилий между правым и левым колесами на основе команды управления возвратом угла отклонения от курса. В этом случае ЭБУ 60 тормоза может формировать тормозное усилие для обоих правых и левых колес или может формировать тормозное усилие, по меньшей мере, для одного из правого и левого колес. Таким образом, собственное транспортное средство выполняет движение отклонения от курса таким образом, что угол отклонения от курса (абсолютное значение) уменьшается. Тормозное усилие регулируется с помощью регулируемой переменной, установленной для управления возвратом угла отклонения от курса, то есть регулируемой переменной, которая позволяет уменьшить угол отклонения от курса с чрезвычайной скоростью для предотвращения столкновений.
[0205] После того, как ЭБУ 10 поддержки вождения посылает команду управления возвратом угла отклонения от курса, ЭБУ 10 поддержки вождения определяет, стал ли угол θу отклонения от курса, определяемый датчиком 12 камеры, равным нулю, то есть, был ли знак (положительный или отрицательный) угла θу отклонения от курса изменен на противоположный. Когда угол θу отклонения от курса становится равным нулю, или, когда знак угла θу отклонения от курса изменен на противоположный, ЭБУ 10 поддержки вождения останавливает отправку команды управления возвратом угла отклонения от курса на ЭБУ 60 тормоза. Таким образом, тормозное усилие не действует и управление возвратом угла отклонения от курса заканчивается. После того, как ЭБУ 10 поддержки вождения останавливает отправку команды управления возвратом угла отклонения от курса, ЭБУ 10 поддержки вождения продолжает процесс до этапа S45.
[0206] Также в модификации 2 можно быстро уменьшить угол отклонения от курса собственного транспортного средства. Подобно модификации 1, предпочтительно применять модификацию 2 в случае, когда установлен датчик 12 камеры с высоким разрешением. Допустимо использовать конфигурацию одновременного выполнения как управления тормозным усилием, так и управления углом поворота руля (например, модификацией 1).
Модификация 3
[0207] Процедура (S40) LCA управления предупреждения о приближении в варианте осуществления разделяется на управление возвратом угла отклонения от курса (S42-S44) и процесс управления (S45-S47) для возврата собственного транспортного средства на предыдущую полосу, однако может выполняться и без разделения на них. Например, в процедуре (S40) LCA управления предупреждения о приближении, процессы этапов S42-S44 исключены. Вместо них используется прием установки целевого времени treturn возврата на предыдущую полосу на короткое время для предотвращения столкновения при вычислении целевой траектории возврата на предыдущую полосу на этапе S45. Здесь выполняется процесс предупреждения водителя на этапе S42.
[0208] В этом случае, на этапе S45, ЭБУ 10 поддержки вождения устанавливает семь параметров вычисления целевой траектории возврата на предыдущую полосу движения (Р21 - Р27). Параметры Р21, Р22, Р23 устанавливаются для поперечного положения (Р21), поперечной скорости (Р22) и поперечного ускорения (Р23) собственного транспортного средства, когда состояние поддержки рулевого управления установлено в состояние LCA управления предупреждения о приближении, соответственно. Другие параметры Р24 - Р27 устанавливаются таким же образом, что и в варианте осуществления.
[0209] Здесь поперечное положение собственного транспортного средства в текущий момент времени (времени, когда установлено состояние LCA управления предупреждения о приближении) обозначено yreturn, поперечная скорость собственного транспортного средства в текущий момент времени обозначена vyreturn, поперечное ускорение собственного транспортного средства в текущий момент времени обозначено ayreturn, время, когда режим поддержки рулевого управления установлен в состояние LCA управления предупреждения о приближении, вновь установлено на t=0, и целевое время возврата на предыдущую полосу обозначено treturn. Параметры расчета целевой траектории возврата на предыдущую полосу установлены на у (0)=yreturn, у'(0)=vyreturn, у''(0)=ayreturn, у (treturn)=W (знак устанавливается в зависимости от направления полосы смены), y'(treturn)=0 и y''(treturn)=0.
[0210] Поперечное положение yreturn, поперечная скорость vyreturn и поперечное ускорение ayreturn являются значениями измерения в текущий момент времени и могут быть вычислены тем же способом, что и описанный выше способ для оценки исходного значения поперечного состояния. Кроме того, у (treturn) устанавливается на целевое поперечное положение завершения возврата на предыдущую линию, то есть в центральное положение предыдущей полосы. В связи с этим, в случае, когда датчик 12 камеры выводит информацию о предыдущей полосе в момент времени, когда режим поддержки рулевого управления установлен в состояние LCA управления предупреждения о приближении, y(treturn) устанавливается на ноль. И y'(treturn), который выражает целевую поперечную скорость завершения возврата на предыдущую полосу, и y''(treturn), который выражает целевое поперечное ускорение завершения возврата на предыдущую линию, устанавливаются на ноль.
[0211] Целевое время treturn возврата на предыдущую полосу параметра Р27 должно быть установлено на короткое время для предотвращения столкновений. Соответственно, целевое время treturn возврата на предыдущую полосу вычисляется приведенным выше выражением (22), с использованием постоянной Areturn установки целевого времени для предотвращения столкновений. Соответственно, постоянная Areturn установки целевого времени устанавливается на меньшее значение, чем постоянная ACancel установки целевого времени, которая используется при управлении отменой LCA. Кроме того, Dreturn в выражении (22) является расстоянием, необходимым для перемещения собственного транспортного средства в поперечном направлении из поперечного положения собственного транспортного средства в то время, когда состояние поддержки рулевого управления устанавливается в состояние LCA управления предупреждения о приближении, в целевое поперечное положение завершения возврата на предыдущую полосу (центральное положение предыдущей полосы).
[0212] На основании заданных значений вычислительных параметров я целевой траектории возврата на предыдущую полосу движения, ЭБУ 10 поддержки вождения вычисляет значения коэффициентов c0, c1, с2, с3, с4, с5 функции у (t), выраженной выражением (2), тем же способом, что и на этапе S14. Затем ЭБУ 10 поддержки вождения подставляет вычисленные значения коэффициентов c0, c1, с2, с3, с4, с5 в выражение (2), и, тем самым, вычисляет целевую функцию y(t) траектории возврата на предыдущую полосу. После того, как ЭБУ 10 поддержки вождения вычисляет целевую функцию y(t) траектории возврата на предыдущую полосу на этапе S45, ЭБУ 10 поддержки вождения переходит к этапу S46.
[0213] Также в модификации 3 можно быстро уменьшить угол отклонения от курса собственного транспортного средства, в случае обнаружения приближающегося транспортного средства во второй части смены полосы.
Модификация 4
[0214] В варианте осуществления одновременно запускается предупреждение (S42) водителю и поддержка рулевого управления (S42, S43) для предотвращения столкновения в случае, когда режим поддержки рулевого управления установлен в состояние LCA управления предупреждения о приближении. Вместо этого может быть сначала выполнено предупреждение водителю, и водитель может быть инициирован на выполнение операции с рулевым колесом. После этого в случае, когда степень сближения между собственным транспортным средством и другим транспортным средством становится еще выше, LCA может быть прекращено, и может быть начато LCA управление предупреждение о приближении.
[0215] На фиг. 17 показана модификация (модифицированная часть) процедуры поддержки рулевого управления. Когда ЭБУ 10 поддержки вождения делает определение «приближение транспортного средства» на этапе S19 (S19: Нет), ЭБУ 10 поддержки вождения выдает предупреждение водителю на этапе S60. Впоследствии, на этапе S61, ЭБУ 10 поддержки вождения определяет, удовлетворено ли условие запуска LCA управления предупреждения о приближении. В этом случае ЭБУ 10 поддержки вождения определяет, является ли время ТТС столкновения меньше порогового значения TTCsteer. Например, пороговое значение TTCsteer устанавливается на меньшее значение, чем пороговое значение ТТС2 второй части на этапе S19. В случае, когда время ТТС столкновения равно или превышает пороговое значение TTCsteer, ЭБУ 10 поддержки вождения переходит к этапу S20. С другой стороны, в случае, когда время ТТС столкновения меньше, чем пороговое значение TTCsteer, ЭБУ 10 поддержки вождения переходит к этапу S40. В этой модификации можно дополнительно повысить удобство.
[0216] Система поддержки рулевого управления в соответствии с вариантом осуществления и модификациями была описана выше. Однако изобретение не ограничивается вариантом осуществления и модификациями, и могут быть сделаны различные изменения без отклонения от сущности изобретения.
[0217] Например, в вышеупомянутом варианте осуществления конечное целевое поперечное положение устанавливается в центральное положение предыдущей полосы в состоянии LCA управления предупреждения о приближении. Однако конечное целевое поперечное положение не всегда должно быть установлено в центральное положение предыдущей полосы и, например, может быть установлено в произвольное поперечное положение на предыдущей полосе.
[0218] Кроме того, в вышеприведенном варианте осуществления определение первой части и второй части смены полосы может выполняться на основе бокового отклонения Dy, определенного датчиком 12 камеры, однако, вместо этого может выполняться на основе истекшего времени от запуска LCA. Например, время (истекшее время от запуска LCA), в котором поперечное положение собственного транспортного средства достигает определенного положения, может быть установлено как время определения, и будет ли состояние выполнения смены полосы являться первой частью или второй частью, может быть определено на основании того, достигло ли время, истекшее с запуска LCA, времени определения.
[0219] В вышеприведенном варианте осуществления, выполнение LCA основано на предпосылке, что режим поддержки рулевого управления является состоянием LTA - ВКЛ (режим, в котором выполняется LTA), однако данная предпосылка необходима не всегда. Кроме того, предпосылка о том, что выполняется АСС, не является необходимой. Кроме того, в варианте осуществления LCA выполняется с условием, что дорога, по которой перемещается собственное транспортное средство, является скоростной дорогой. Однако обеспечение этого условия не всегда является необходимым.
[0220] В вышеприведенном варианте осуществления полоса распознается датчиком 12 камеры. Однако взаимное расположение собственного транспортного средства относительно полосы может быть определено ЭБУ 70 навигации.
[0221] После того, как поддержка управления предотвращением столкновения выполнено, может быть надлежащим образом выполнено другое управление поддержки рулевого управления по поддержке действий рулевым колесом для перемещения собственного транспортного средства в нужное положение.
[0222] Уменьшение угла отклонения от курса означает уменьшение абсолютного значения угла отклонения от курса. В случае, когда угол отклонения от курса уменьшается с чрезвычайной скоростью, рулевое управление, например, может регулироваться таким образом, чтобы угол отклонения от курса уменьшался с максимальным углом поворота руля, который допускается в системе поддержки рулевого управления. Кроме того, например, угол отклонения от курса может быть уменьшен путем регулирования ориентации собственного транспортного средства с использованием усилия торможения колеса. «Уменьшение с чрезвычайной скоростью, которая выше скорости, при которой угол отклонения от курса изменяется с помощью поддержки управления возвратом по центру», означает уменьшение с чрезвычайной скоростью, которая выше скорости, при которой угол отклонения от курса изменяется за счет поддержки управления возвратом по центру, например, в отношении средней скорости, вместо значения мгновенной скорости в определенное время. Соответственно, в течение короткого времени можно уменьшить поперечную скорость, которая является скоростью собственного транспортного средства в направлении ширины полосы. Когда запускается поддержка управления при смене полосы движения, угол отклонения от курса увеличивается для того, чтобы движение собственного транспортного средства было направлено к целевой полосе. Поддержка управления предотвращением столкновений регулирует рулевое управление таким образом, чтобы угол отклонения от курса, увеличенный за счет поддержки управления при смене полосы, возвращался к углу отклонения от курса непосредственно перед тем, как срочно началась поддержка управления при смене полосы движения (с чрезвычайной скоростью).
[0223] При выполнении поддержки управления отслеживания полосы, обычное положение в направлении ширины полосы может представлять собой, например, центральное положение в направлении ширины полосы. Когда запускается поддержка управления сменой полосы, считается, что угол отклонения от курса представляет собой значение, близкое к нулю.
[0224] Изменение целевой кривизны соответствует изменению угла поворота руля и может рассматриваться, как изменение угла отклонения от курса. Это означает, что можно регулировать угол отклонения от курса до значения, близкого к значению непосредственно перед запуском поддержки управления при смене полосы, путем регулирования рулевого управления, чтобы отрегулировать до нуля интегрированное значение целевой кривизны, которое изменяется со временем от запуска поддержки управления при смене полосы. Соответственно, вычисляется значение, соответствующее интегрированному значению целевой кривизны от запуска поддержки управления при смене полосы до начала поддержки управления предотвращением столкновений, и рассчитывается целевая регулируемая переменная на основе значения, соответствующего вычисленному интегрированному значению. Затем рулевое управление регулируется на основе целевой регулируемой переменной. Например, целевая регулируемая переменная может быть рассчитана на основе значения, полученного в результате замены на противоположный знака интегрированного значения целевой кривизны. Интегрированное значение целевой кривизны может быть оценено путем интегрирования целевой кривизны, и интегрированное значение целевой кривизны может быть оценено, например, путем вычисления значения, полученного в результате деления поперечной скорости (может быть принята целевая поперечная скорость для управления) собственного транспортного средства, когда поддержка управления при смене полосы останавливается, на квадрат скорости транспортного средства. Угол отклонения от курса непосредственно перед запуском поддержки управления при смене полосы - это значение, близкое к нулю. Соответственно, можно за короткое время настроить ориентацию собственного транспортного средства на ориентацию, близкую к направлению, в котором пролегает полоса.
[0225] Определение состояния выполнения и определение первой части и второй части может быть выполнено путем определения относительного положения собственного транспортного средства на полосе движения на основе информации о полосе, или может быть выполнено путем оценки относительного положения собственного транспортного средства на полосе движения в зависимости от времени, истекшего с запуска поддержки управления при смене полосы.
[0226] Кроме того, даже в том случае, когда обнаружено приближающееся транспортное средство, и запущена поддержка управления возврата по центру, когда собственное транспортное средство находится на предыдущей полосе, угол отклонения от курса не сразу становится значением, близким к нулю (то есть, имеется задержка управления и т.п.), и, соответственно, собственное транспортное средство в некоторой степени движется в направлении смены полосы. То есть, поперечное положение собственного транспортного средства перерегулируется в направлении смены полосы движения при запуске поддержки управления возврата по центру. Соответственно, определение первой части и второй части может выполняться, когда заранее прогнозируется значение перерегулирования (расстояние поперечного перемещения, когда собственное транспортное средство движется в направлении смены полосы). То есть, состояние выполнения смены полосы может быть переключено с первой части на вторую часть раньше, прежде чем боковая часть собственного транспортного средства на стороне смены полосы достигнет границы между предыдущей полосой и целевой полосой.
[0227] Перерегулирование из-за задержки поддержки управления возврата по центру тем больше, чем выше скорость собственного транспортного средства в направлении ширины полосы. Соответственно, положение определения может быть установлено таким образом, что расстояние между границей и положением определения тем больше, чем выше скорость собственного транспортного средства в направлении ширины полосы.
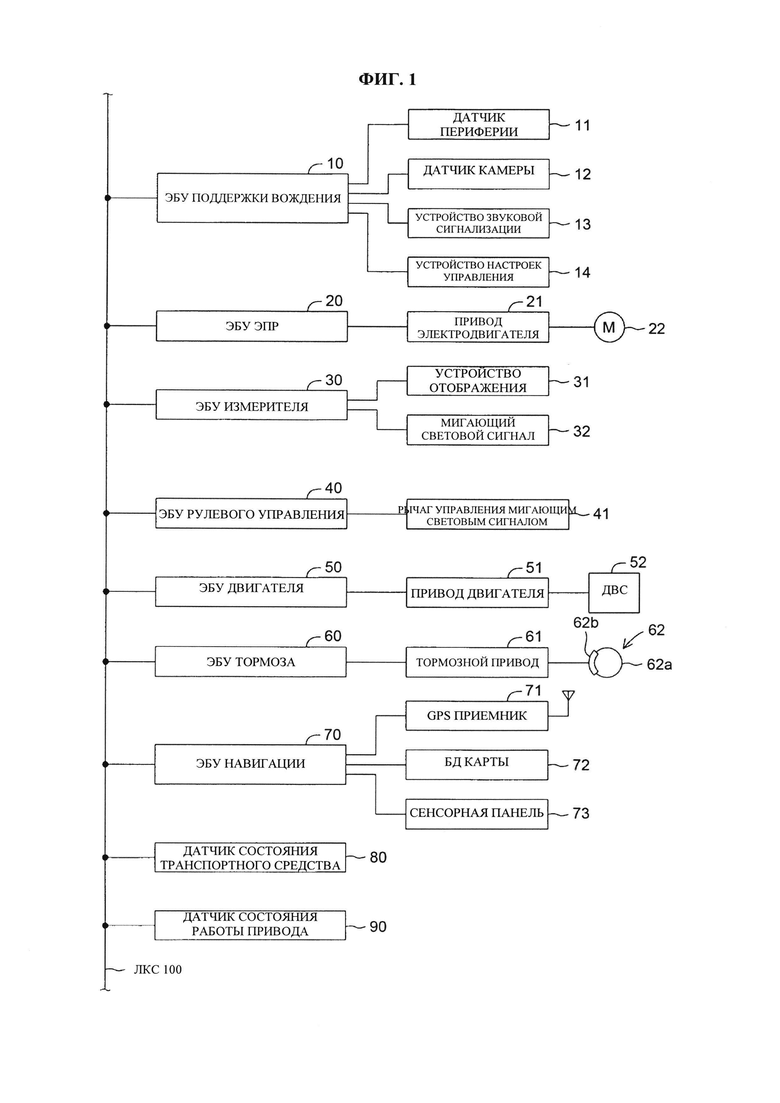
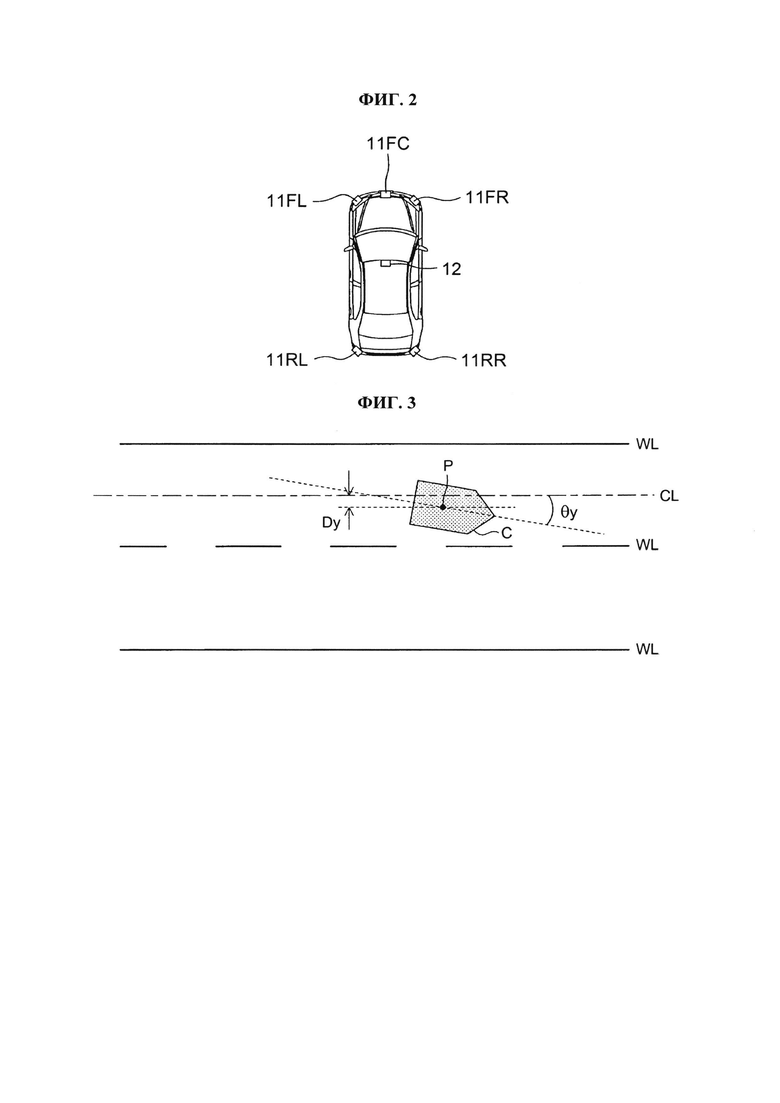

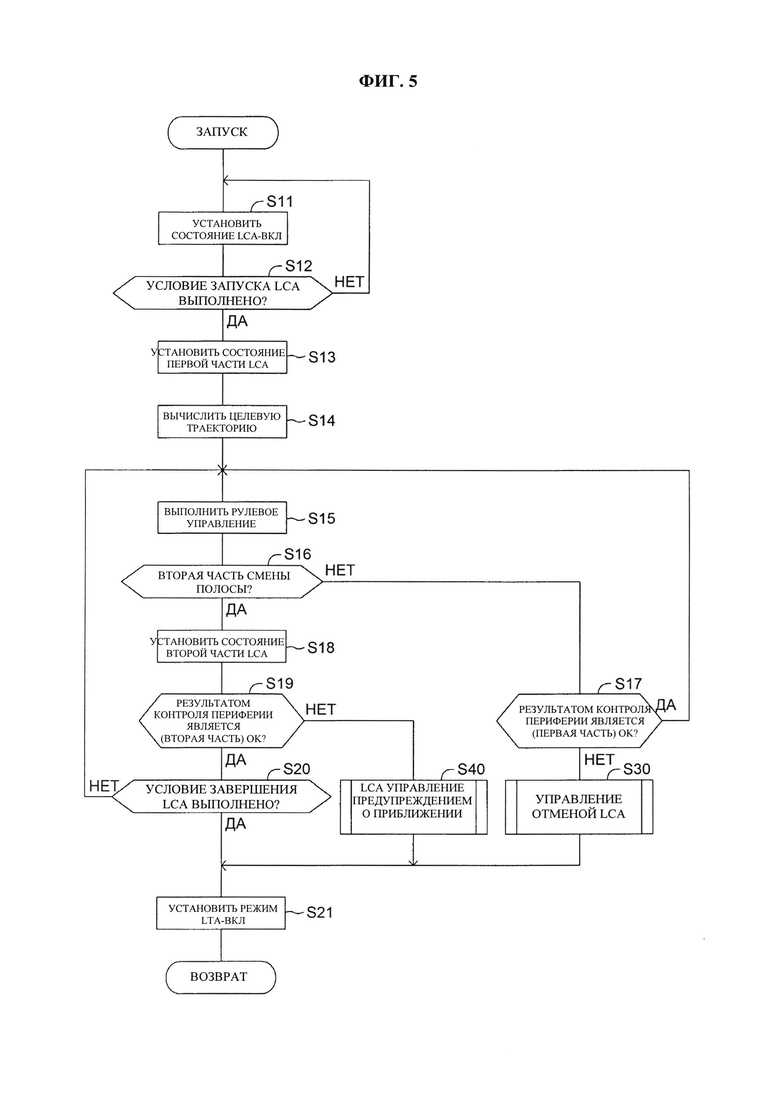
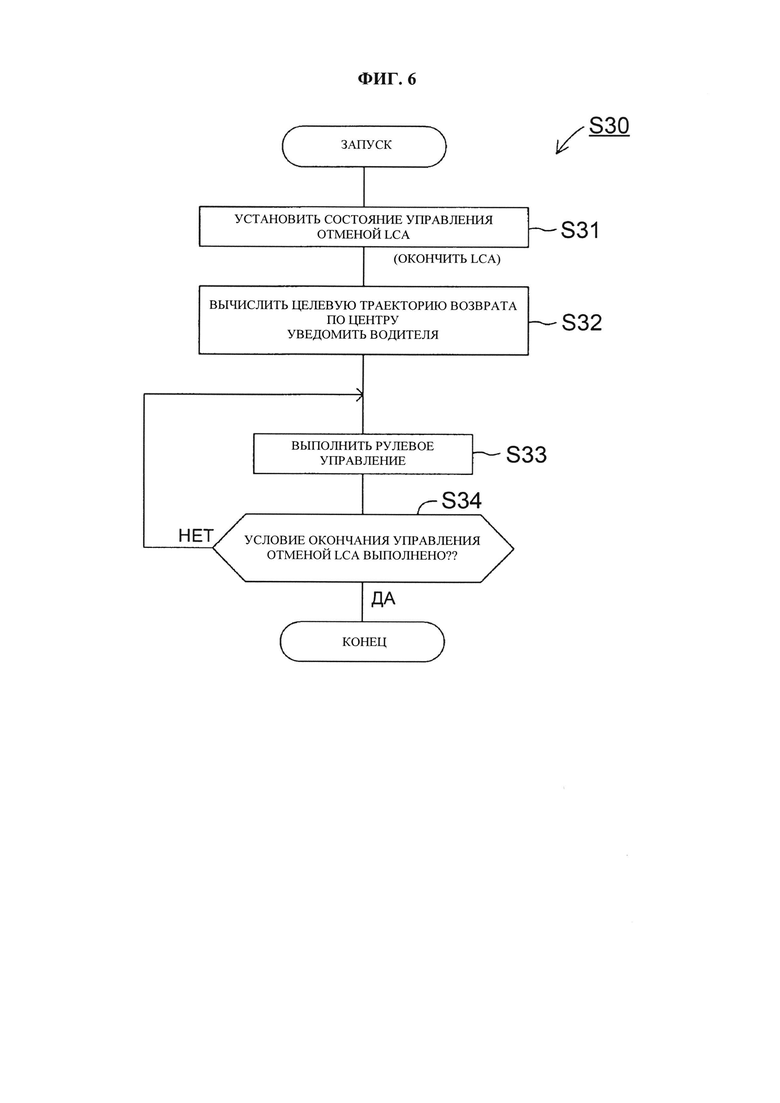
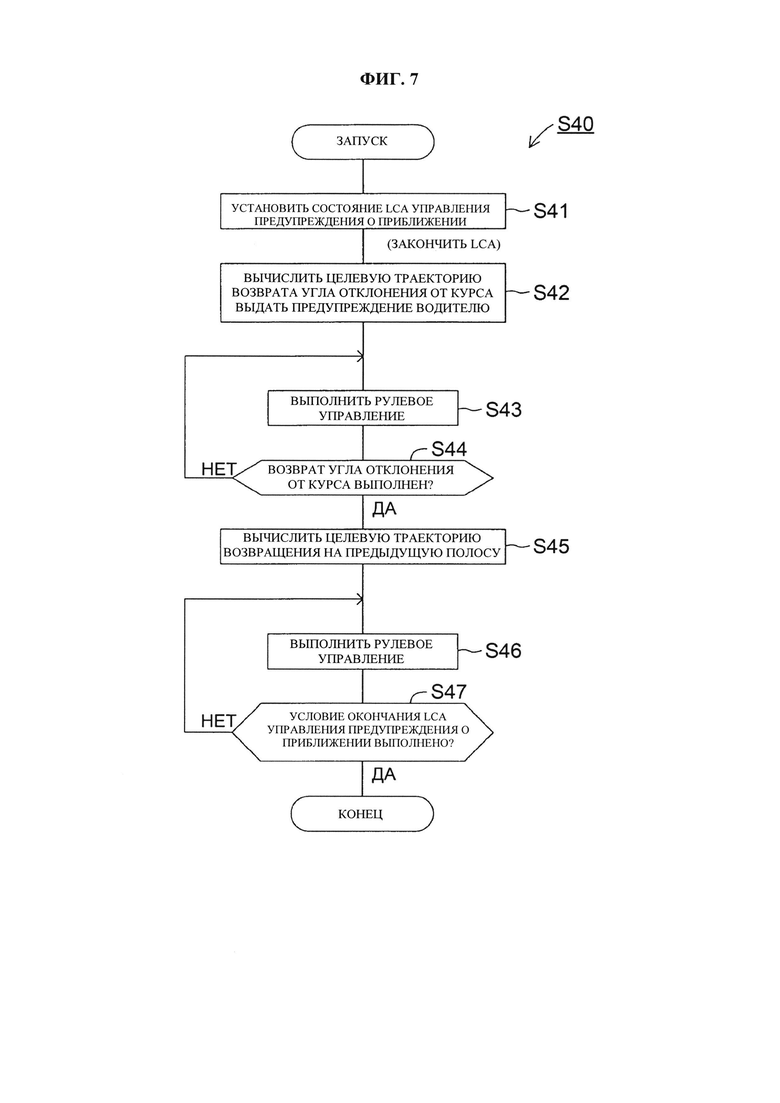
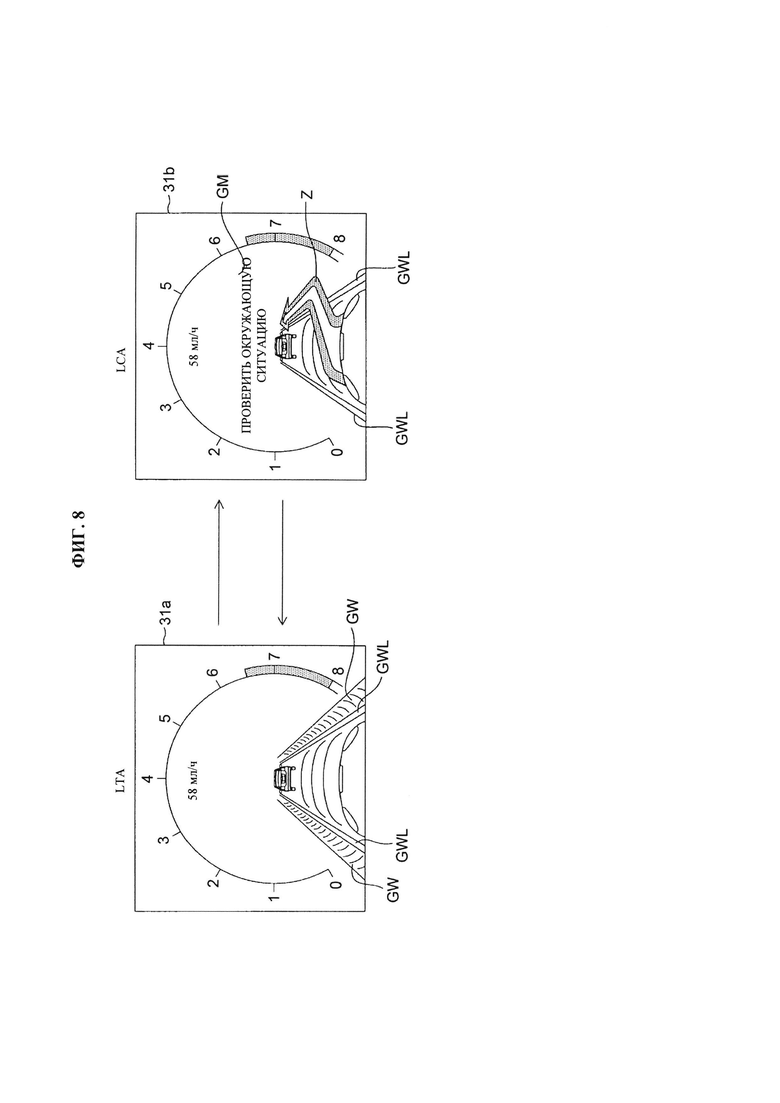

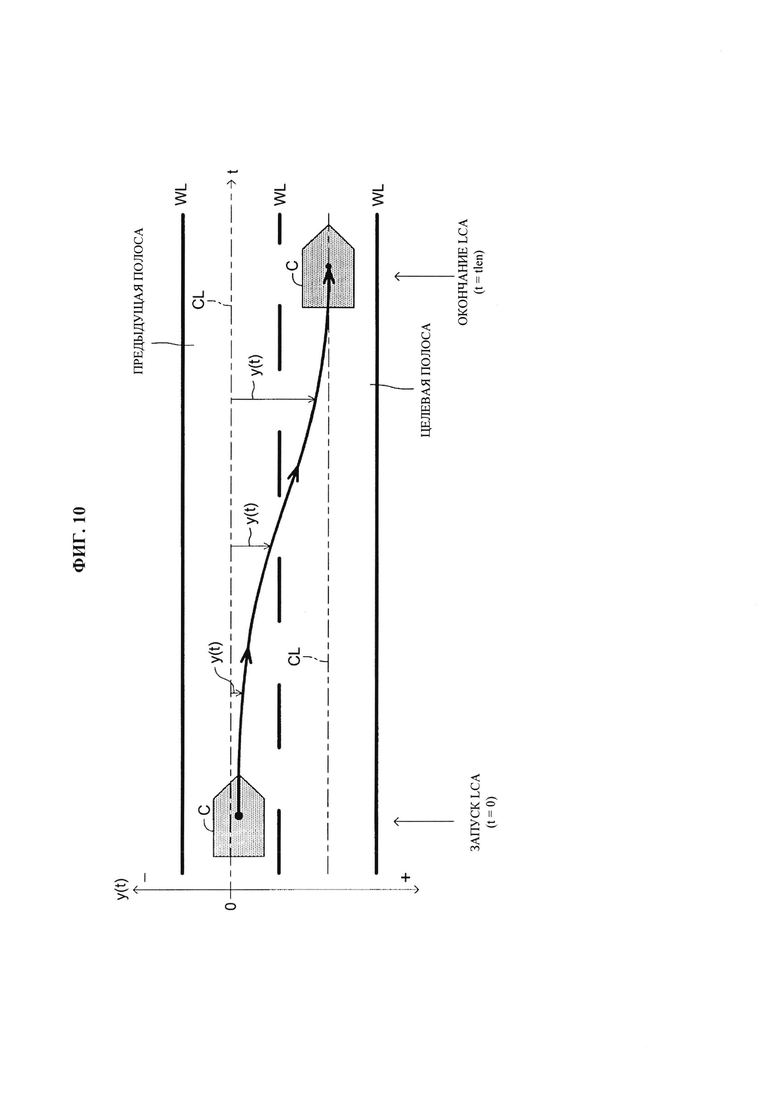
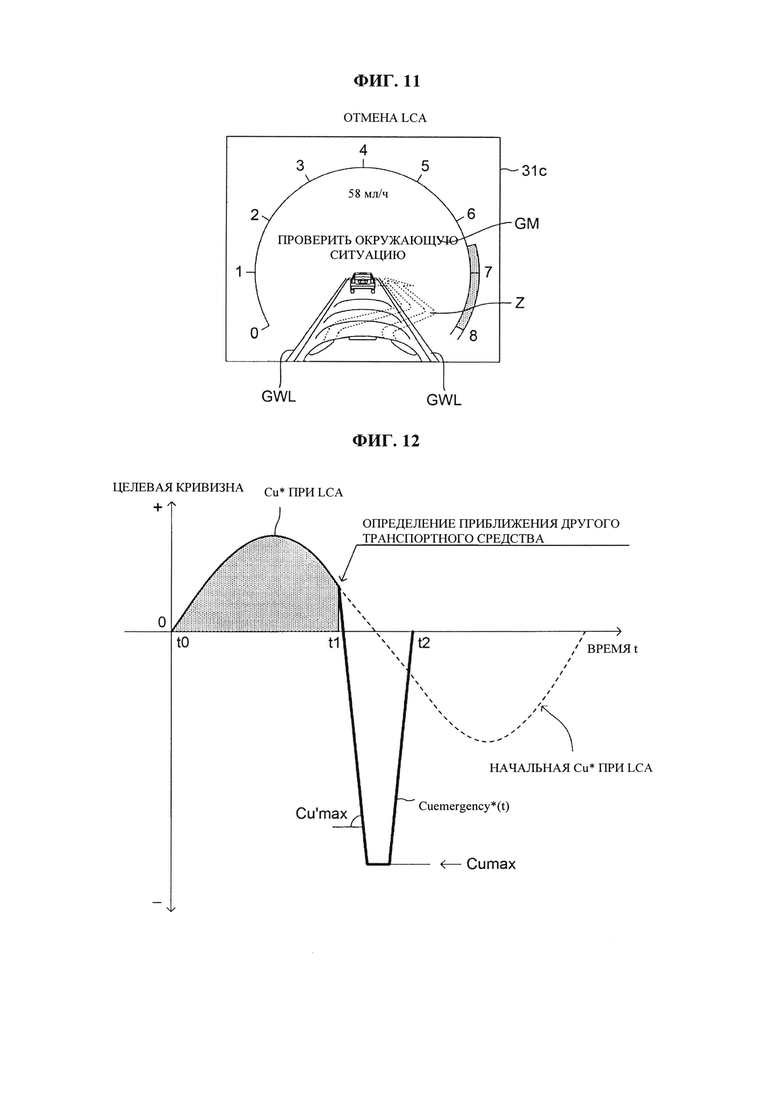
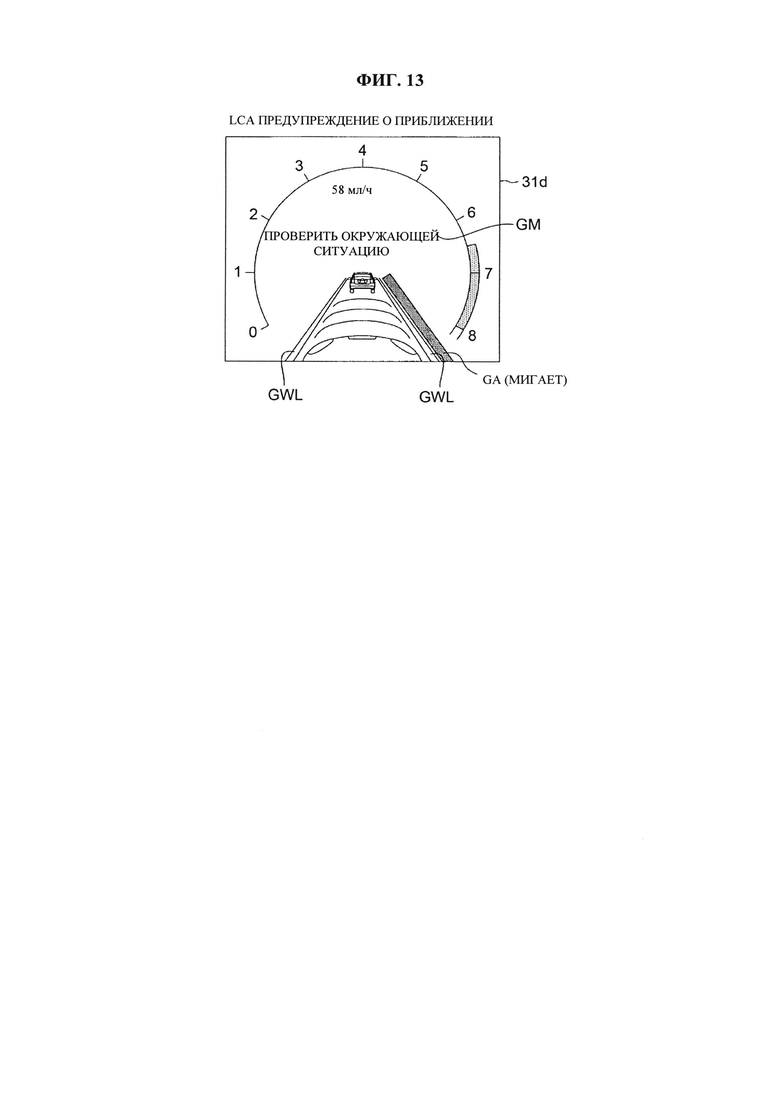
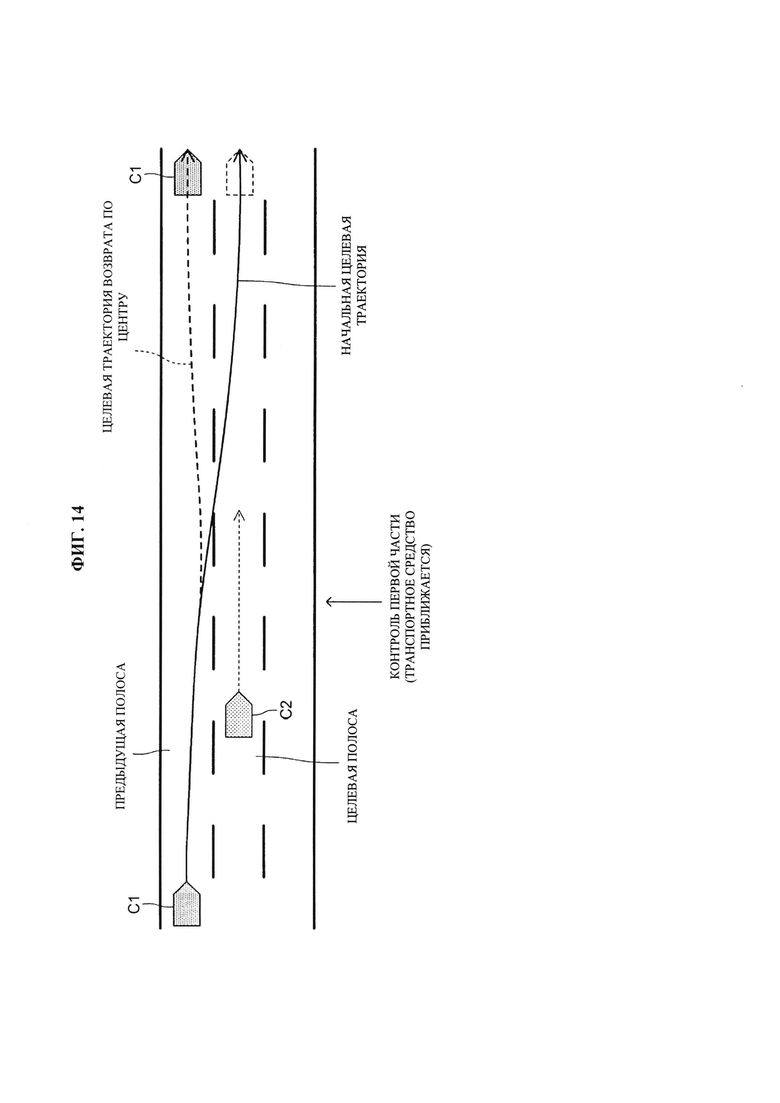


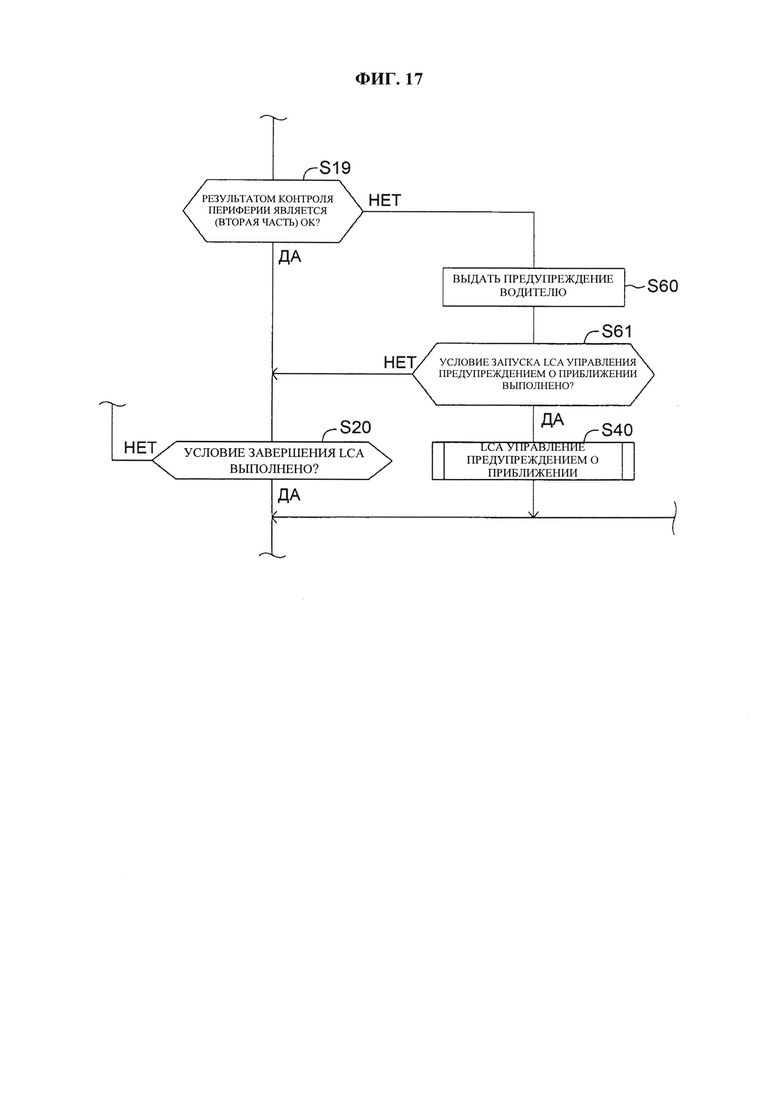
Изобретение относится к системе поддержки рулевого управления. Система поддержки рулевого управления содержит: блок контроля периферии, блок распознавания полосы, блок поддержки управления при смене полосы, блок определения состояния выполнения смены полосы, блок остановки поддержки смены полосы движения, выполненный с возможностью остановки поддержки управления при смене полосы, когда блок контроля периферии определяет приближающееся транспортное средство, блок поддержки управления возвратом по центру, выполненный с возможностью выполнения поддержки управления возвратом по центру, когда поддержка управления при смене полосы остановлена в первой части смены полосы, блок поддержки управления предотвращением столкновения, выполненный с возможностью выполнения поддержки управления предотвращением столкновения, когда поддержка управления при смене полосы движения остановлена во второй части смены полосы. Обеспечивается поддержка рулевого управления при смене полосы для повышения безопасности и удобства. 7 з.п. ф-лы, 17 ил.
1. Система поддержки рулевого управления, содержащая:
блок контроля периферии, выполненный с возможностью контроля периферии собственного транспортного средства;
блок распознавания полосы, выполненный с возможностью
распознавания полосы и
получения информации о полосе движения, включая относительное расположение собственного транспортного средства относительно полосы; блок поддержки управления при смене полосы, выполненный с возможностью запуска поддержки управления при смене полосы в ответ на запрос поддержки при смене полосы движения, в случае когда блок контроля периферии не определяет другое транспортное средство, препятствующее смене полосы, выполняемой собственным транспортным средством, при этом поддержка управления при смене полосы, регулирует рулевое управление таким образом, что собственное транспортное средство выполняет смену полосы от предыдущей полосы до целевой полосы на основе информации о полосе, причем предыдущая полоса представляет собой полосу, по которой в настоящее время перемещается собственное транспортное средство, а целевая полоса представляет собой полосу, смежную к предыдущей полосе;
блок определения состояния выполнения, выполненный с возможностью определения состояния выполнения смены полосы посредством поддержки управления при смене полосы в текущий момент времени;
блок остановки поддержки смены полосы, выполненный с возможностью досрочной остановки поддержки управления при смене полосы, когда блок контроля периферии определяет приближающееся транспортное средство, при этом приближающееся транспортное средство может с вероятностью аварийно приблизиться к собственному транспортному средству в случае, когда поддержка управления при смене полосы продолжается;
блок поддержки управления возвратом по центру, выполненный с возможностью выполнения поддержки управления возвратом по центру, в случае когда состояние выполнения, определенное блоком определения состояния выполнения, когда обнаружено приближающееся транспортное средство и поддержка управления при смене полосы досрочно остановлена, является первой частью смены полосы движения, при этом поддержка управления возвратом по центру регулирует рулевое управление таким образом, что собственное транспортное средство перемещается в центральное положение предыдущей полосы в направлении ширины предыдущей полосы; и
блок поддержки управления предотвращением столкновения, выполненный с возможностью выполнения поддержки управления предотвращением столкновения, в случае когда состояние выполнения, определенное блоком определения состояния выполнения, когда обнаружено приближающееся транспортное средство и поддержка управления при смене полосы досрочно остановлена, является второй частью смены полосы, при этом поддержка управления предотвращением столкновения регулирует ориентацию собственного транспортного средства таким образом, что угол отклонения от курса уменьшается с чрезвычайной скоростью, причем угол отклонения от курса является углом между направлением, в котором проходит полоса, и направлением ориентации собственного транспортного средства, притом чрезвычайная скорость выше скорости, при которой угол отклонения от курса изменяется посредством поддержки управления возвратом по центру.
2. Система поддержки рулевого управления по п. 1, дополнительно содержащая
блок поддержки управления отслеживания полосы, выполненный с возможностью выполнения поддержки управления отслеживания полосы, при этом поддержка управления отслеживания полосы регулирует рулевое управление так, что положение перемещения собственного транспортного средства удерживается в правильном положении в направлении ширины полосы на полосе на основе информации о полосе, в которой
блок поддержки управления при смене полосы выполнен с возможностью
остановки поддержки управления отслеживания полосы и
запуска поддержки управления при смене полосы, в случае когда получен запрос на поддержку при смене полосы, в то время как выполняется поддержка управления отслеживания полосы, и
блок поддержки управления предотвращением столкновения выполнен с возможностью регулирования рулевого управления таким образом, что угол отклонения от курса, увеличиваемый за счет поддержки управления при смене полосы, возвращается к предыдущему углу отклонения от курса непосредственно перед запуском поддержки управления при смене полосы.
3. Система поддержки рулевого управления по п. 2, в которой
блок поддержки управления при смене полосы движения выполнен с возможностью
вычисления первой целевой регулируемой переменной в заранее заданном вычислительном цикле, причем первая целевая регулируемая переменная включает в себя прогнозируемую регулируемую переменную, в которой используется целевая кривизна траектории, по которой собственное транспортное средство выполняет смену полосы движения, и
осуществления рулевого управления на основе первой целевой регулируемой переменной и
блок поддержки управления предотвращением столкновения выполнен с возможностью
вычисления значения, соответствующего интегрированному значению целевой кривизны, с запуска поддержки управления при смене полосы до начала поддержки управления предотвращением столкновения,
вычисления второй целевой регулируемой переменной на основе значения, соответствующего интегрированному значению, и
регулирования рулевого управления на основе второй целевой регулируемой переменной во время выполнения поддержки управления предотвращением столкновения.
4. Система поддержки рулевого управления по любому из пп. 1-3, дополнительно содержащая
блок поддержки управления возвратом на предыдущую полосу, выполненный с возможностью осуществления поддержки управления возвратом на предыдущую полосу после завершения поддержки управления предотвращением столкновения, при этом поддержка управления возвратом на предыдущую полосу регулирует рулевое управление таким образом, что собственное транспортное средство перемещается в центральное положение предыдущей полосы в направлении ширины предыдущей полосы.
5. Система поддержки рулевого управления по любому из пп. 1-4, в которой
блок определения состояния выполнения выполнен с возможностью
определения того, будет ли состояние выполнения смены полосы посредством поддержки управления при смене полосы в текущий момент времени первой частью смены полосы или второй частью смены полосы,
определения того, что состояние выполнения является первой частью смены полосы в случае, когда произведена оценка, что собственное транспортное средство находится на предыдущей полосе, и
определения того, что состояние выполнения является второй частью смены полосы в случае, когда произведена оценка, что, по меньшей мере, часть собственного транспортного средства находится на целевой полосе.
6. Система поддержки рулевого управления по любому из пп. 1-4, в которой
блок определения состояния выполнения выполнен с возможностью
определения того, является ли состояние выполнения смены полосы посредством поддержки управления при смене полосы в текущий момент времени первой частью смены полосы или второй частью смены полосы,
определения того, что состояние выполнения является первой частью смены полосы в случае, когда произведена оценка, что собственное транспортное средство находится в первой области, которая находится на противоположной стороне положения определения от целевой полосы в направлении смены полосы, и
определения того, что состояние выполнения является второй частью смены полосы в случае, когда произведена оценка, что собственное транспортное средство находится во второй области, которая находится на противоположной стороне положения определения от первой области в направлении смены полосы,
причем положение определения представляет собой конкретное положение, расположенное между центральным положением предыдущей полосы в направлении ширины предыдущей полосы и границей, притом упомянутая граница находится между предыдущей полосой и целевой полосой.
7. Система поддержки рулевого управления по п. 6, в которой
блок определения состояния выполнения выполнен с возможностью устанавливать положение определения таким образом, что расстояние между границей и положением определения тем больше, чем выше скорость собственного транспортного средства в направлении ширины полосы.
8. Система поддержки рулевого управления по любому из пп. 1-7, в которой
блок контроля периферии выполнен с возможностью определять, что обнаружено приближающееся транспортное средство, когда степень приближения другого транспортного средства к собственному транспортному средству превышает пороговое значение, и указанное пороговое значение установлено на значение, соответствующее более высокой степени сближения во второй части смены полосы, чем в первой части смены полосы.
| WO 2017017793 A1, 02.02.2017 | |||
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2492083C1 |
| RU 2015145860 A, 28.04.2017 | |||
| УСТРОЙСТВО КОНТРОЛЯ ВОЖДЕНИЯ | 2010 |
|
RU2520855C2 |
| WO 2016024317 A1, 18.02.2016 | |||
| DE 102005036714 A1, 08.02.2007. | |||

