Изобретение относится к способу и устройству определения пенетрации - глубины проникновения рабочего тела стандартной формы и веса в образец испытуемого материала в течение заданного времени при определенной температуре. В частности, настоящее изобретение относится к пенетрометру и способу для измерения пенетрации таких материалов как дорожные вяжущие, смазочные материалы, герметики. Измерение пенетрации является обязательным при определении качества дорожных вяжущих в дорожном строительстве.
Для определения пенетрации дорожных вяжущих используется способ в соответствии со стандартными методами, согласно ГОСТ 33136-2014, ГОСТ 5346-78, ГОСТ ISO 2137, EN 1426, ASTM D5. За единицу пенетрации принимается погружение на 0,1 мм. При этом рабочее тело стандартной формы и веса, состоящее из стержня и погружного тела, проникает в течение заданного времени, под собственным весом в образец испытуемого материала. Измеренная таким образом пенетрация, выраженная в единицах пенетрации, отражается в обозначении битума, например, БНД 70 означает глубину погружения 7 мм.
Важным условием, определяющим повторяемость результатов, является точное позиционирование рабочего тела перед пенетрацией непосредственно над поверхностью образца, а также отсутствие добавочных сил трения при движении рабочего тела.
Известен способ из патента DE 10257170 В4 для определения степени твердости полутвердых материалов, при котором перед измерением степени твердости испытательное тело, соединенное с датчиком усилия/пути, опускается в измеряемый материал таким образом, что исследуемый материал при первом подводе испытательного тела, связанного с датчиком, получает только эластичную деформацию. Посредством, по меньшей мере, двух значений измерения усилия/пути датчиком определяется точное стартовое положение для испытательного тела над или на измеряемом материале, и затем, испытательное тело устанавливается в это стартовое положение.
Благодаря этому способу обеспечивается автоматический процесс подвода, за счет чего можно исключить субъективные ошибки подвода. Однако недостатком является относительно большая масса, которая воздействует на датчик усилия/пути, что приводит к большой чувствительности к помехам, таким как вибрации и т.п.
Кроме того, из RU 2443995 С2 известен способ и устройство для определения степени твердости полутвердых материалов в котором, с целью повышения точности, датчик усилия размещен в рабочем теле и является частью рабочего тела. Данный патент является наиболее близким и может считаться прототипом.
В этом способе также обеспечивается автоматический процесс подвода, и точность определения касания, за счет снижения массы рабочего тела с датчиком. Однако недостатком является относительно большой уровень помех при измерении усилия во время перемещения рабочего тела с датчиком и наличие сил трения, которые снижают величину пенетрации при проведении испытаний.
Задачами заявляемого изобретения являются, повышение точности определения момента касания рабочим телом поверхности образца испытуемого материала, повышение точности, повторяемости измерений величины пенетрации и снижение стоимости устройства.
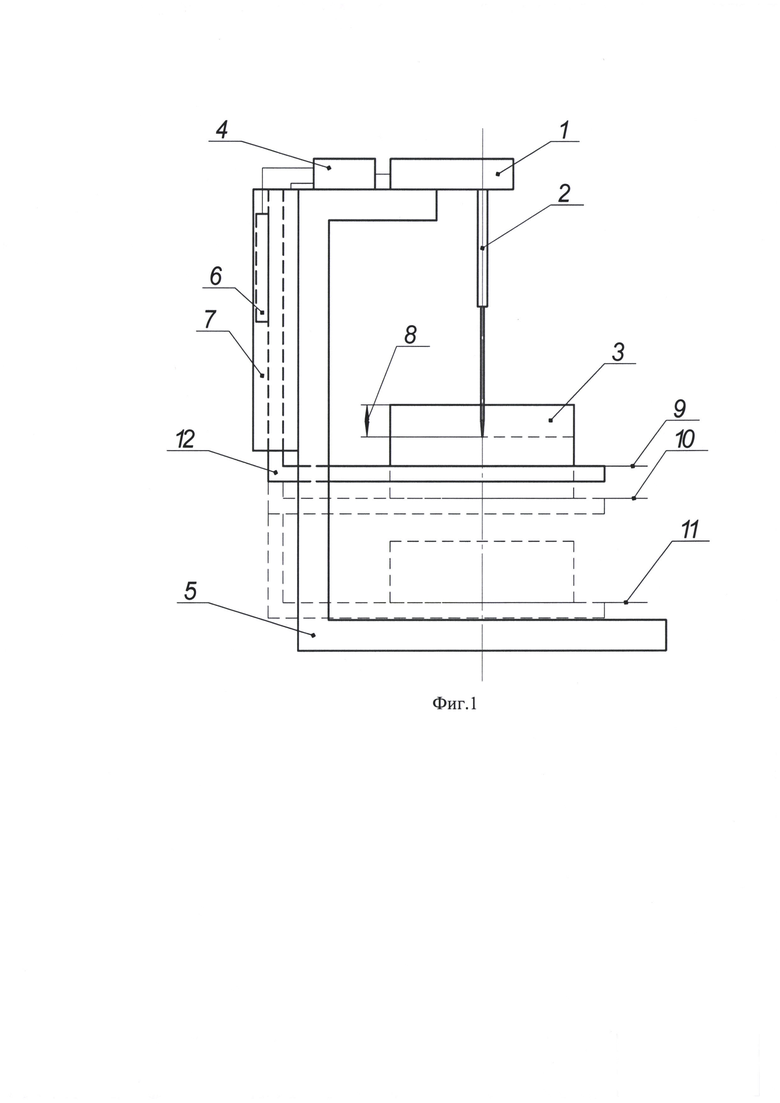
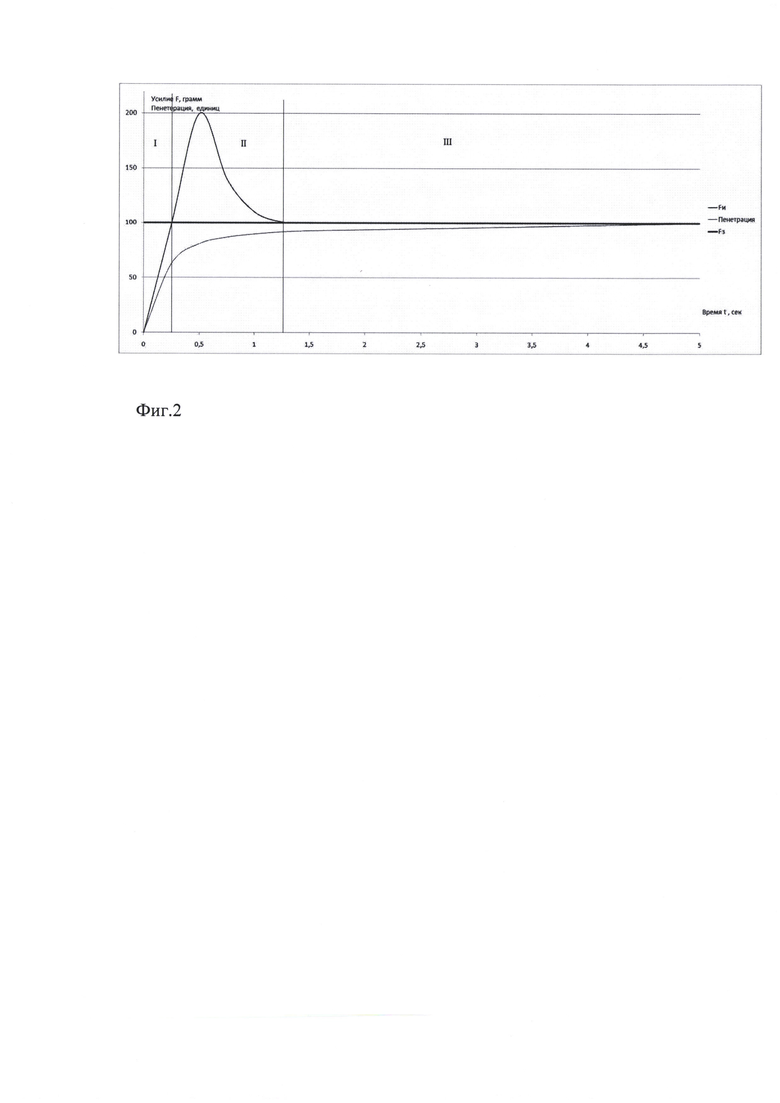
Сущность способа и устройства поясняется чертежами, где на фиг. 1 показана схема устройства измерения, на фиг. 2 типовой график усилия при пенетрации битума.
Особенностью заявленного способа и устройства является то, что для определения усилия пенетрации используется неподвижное рабочее тело, закрепленное на неподвижном датчике усилия, а пенетрация осуществляется перемещением стола с образцом испытуемого материала вертикально вверх. При этом имитируется погружение аналогично стандартному методу измерения пенетрации падающего рабочего тела под действием собственного веса в неподвижный образец. При имитации погружения задается скорость перемещения стола с образцом. Для этого предварительно вычисляется ускорение по формуле (1):
, где
аз - заданное ускорение;
g - константа, ускорение свободного падения,
принимается с округлением = 9,81 м/сек2;
Fи - измеренное значение силы с датчика усилия в граммах;
Fз - константа, заданное значение веса рабочего тела 2 в соответствии с используемым стандартным методом измерения (50/100/200 грамм).
На основании требуемого ускорения вычисляется скорость движения образца 3 по формуле (2)

, где
Vз - заданная скорость;
Ут - текущая скорость;
tинт - интервал времени между измерениями величин.
Далее осуществляется перемещение стола 12 с образцом 3 испытуемого материала вертикально вверх с управляемой скоростью и ускорением, с постоянным измерением усилия на рабочем теле 2, в течение заданного времени (5 или 60 сек). Величина перемещения за это время является значением пенетрации 8.
Процесс пенетрации Фиг. 2 с управлением ускорением состоит из трех основных этапов. На первом этапе, при малых значениях усилия, происходит увеличение скорости, что соответствует увеличению импульса и кинетической энергии рабочего тела 2 при стандартном методе измерения. На втором этапе, при усилиях выше Fз, происходит снижение скорости, что соответствует снижению импульса и кинетической энергии рабочего тела 2 при стандартном методе измерения. И на третьем этапе, при усилии равном Fз, пенетрация идет с постоянной скоростью.
При этом не требуется выдерживать вес рабочего тела 2 в соответствии со стандартным методом измерения. Это позволяет максимально снизить массу рабочего тела 2, что снижает помехи от механических вибраций при измерении усилия. Измерение усилия на неподвижном рабочем теле 2 позволяет исключить погрешность, возникающую от сил трения.
Предлагаемый пенетрометр Фиг. 1 имеет основание 5, на верхней части которого установлен датчик усилия 1, на котором закреплено рабочее тело 2. Рабочее тело 2 неподвижно относительно основания 5, датчик усилия 1 измеряет силу, действующую на рабочее тело 2 в вертикальном направлении. Привод 7 с датчиком перемещения 6 также закреплен на основании 5 и выполняет перемещение в вертикальном направлении стола 12. На столе 12 размещается образец 3 испытуемого материала. Блок измерения и управления 4 контролирует усилие, перемещение, время, температуру и задает скорость перемещения стола 12 с образцом 3 испытуемого материала.
Измерение пенетрации 8 происходит следующим образом: в начале испытания стол 12 с образцом 3 находится в исходной позиции 11, затем стол 12 с образцом 3 с помощью привода 7 начинает движение вертикально вверх, блок измерения и управления 4 с помощью датчика усилия 1 измеряет усилие, действующее на рабочее тело 2. При превышении порога усилия соответствующего эластичной деформации не более одной единицы пенетрации, стол 12 останавливается в стартовой позиции 10, где по датчику перемещения 6 запоминается начальная координата. С этой координаты перемещения начинается отсчет значения пенетрации 8. Блок измерения и управления 4 на основании измерения усилия и перемещения, по формулам (1) и (2) с помощью привода 7 задает скорость перемещения стола 12 с образцом 3, имитируя процесс падения рабочего тела 2 в образец 3. По окончании времени испытания, стол 12 с образцом 3 останавливается в конечной позиции 9. Разность координат перемещения между конечной позицией 9 и стартовой позицией 10 является величиной пенетрации 8. Затем стол 12 с образцом 3 с помощью привода 7 возвращается в исходную позицию 11.
Данный способ определения пенетрации полутвердых материалов найдет применение в испытательных лабораториях. Устройство для его осуществления может изготавливаться в промышленных масштабах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СТЕПЕНИ ТВЕРДОСТИ ПОЛУТВЕРДЫХ МАТЕРИАЛОВ | 2007 |
|
RU2443995C2 |
| Пенетрометр | 1989 |
|
SU1716382A1 |
| Пенетрометр | 1987 |
|
SU1456831A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ЭЛАСТИЧНЫХ МАТЕРИАЛОВ С МАЛЫМ ПОПЕРЕЧНЫМ СЕЧЕНИЕМ ПРИ ВОЗДЕЙСТВИИ НА НИХ НАТЯЖЕНИЯ И ТЕМПЕРАТУРЫ | 2018 |
|
RU2704579C1 |
| Способ определения глубины проникания иглы для битумных вяжущих | 2020 |
|
RU2734716C1 |
| Пенетрометр | 1983 |
|
SU1110869A1 |
| СПОСОБ ОЦЕНКИ НИЗКОТЕМПЕРАТУРНЫХ СВОЙСТВ ПОЛУЖИДКИХ СМАЗОК | 2023 |
|
RU2815207C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОЧНОСТИ ГЕЛЕОБРАЗНЫХ ПРОДУКТОВ | 2009 |
|
RU2417360C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФАКТИЧЕСКОЙ ПЛОТНОСТИ ГРУНТОВ ПРИ ПОМОЩИ ПОСТРОЕНИЯ 3D МОДЕЛИ ЛУНКИ | 2023 |
|
RU2803712C1 |
| РЕВЕРСОР ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ СВОЙСТВ ОБРАЗЦОВ | 2012 |
|
RU2521727C1 |
Изобретение относится к способу и устройству определения пенетрации - глубины проникновения рабочего тела стандартной формы и веса в образец испытуемого материала. Пенетрометр содержит блок измерения и управления, неподвижное рабочее тело, закрепленное на датчике усилия, установленном на основании, имеющем привод с датчиком перемещения для перемещения стола с образцом в вертикальном направлении из исходной позиции до положения определения момента касания или стартовой позиции, а затем, после проведения пенетрации, до конечной позиции. Рабочее тело неподвижно, а стол с образцом с помощью привода перемещается в течение заданного времени из стартовой позиции вертикально вверх в конечную позицию с постоянным измерением усилия на рабочем теле с помощью датчика усилия и координаты с помощью датчика перемещения, управляя при этом ускорением и скоростью перемещения образца, которые вычисляются по формулам. Технический результат: повышение точности определения момента касания рабочим телом поверхности образца испытуемого материала, повышение точности и повторяемости измерений величины пенетрации. 2 н. и 1 з.п. ф-лы, 2 ил.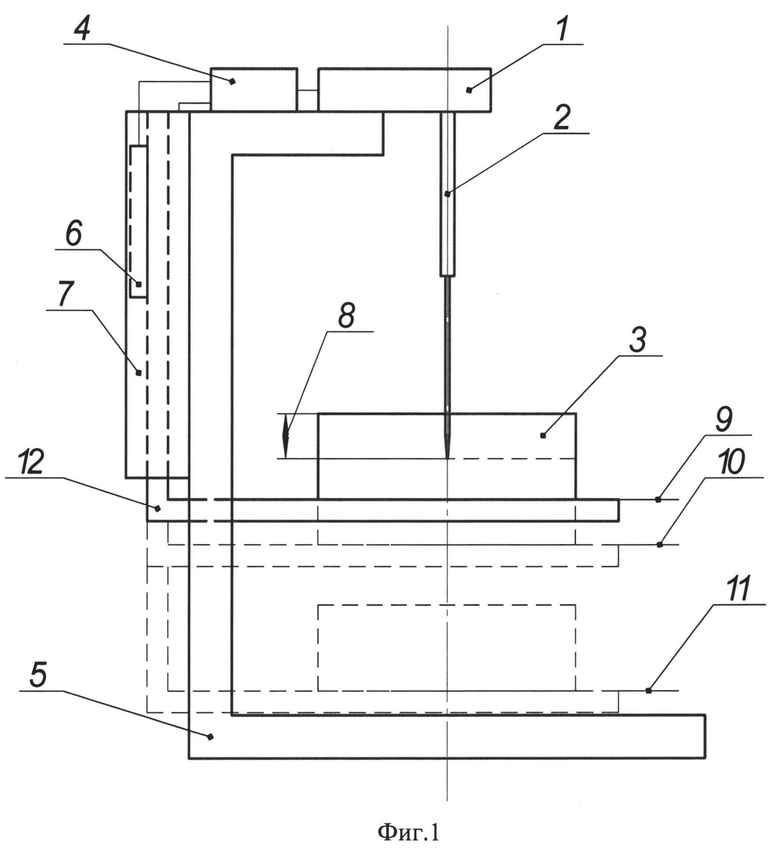
1. Способ определения пенетрации полутвердых материалов измерением глубины проникновения рабочего тела в образец, отличающийся тем, что рабочее тело неподвижно, а стол с образцом с помощью привода перемещается в течение заданного времени из стартовой позиции вертикально вверх в конечную позицию с постоянным измерением усилия на рабочем теле с помощью датчика усилия и координаты с помощью датчика перемещения, управляя при этом ускорением и скоростью перемещения образца, которые вычисляются по следующим формулам:
 ,
,
где аз - заданное ускорение;
g - константа, ускорение свободного падения;
Fи - измеренное значение силы с датчика усилия;
Fз - константа, заданное значение веса рабочего тела в соответствии с используемым стандартным методом измерения;
 ,
,
где Vз - заданная скорость;
Vт - текущая скорость;
tинт - интервал времени между измерениями величин.
2. Способ по п. 1, отличающийся тем, что предварительно для определения момента касания или стартовой позиции образец поднимается из исходной позиции с одновременным измерением усилия на рабочем теле, и по превышению усилием порога, обеспечивающего эластичную деформацию менее одной единицы пенетрации, определяется стартовая позиция стола.
3. Устройство (Пенетрометр) для определения пенетрации полутвердых материалов, имеющее блок измерения и управления, неподвижное рабочее тело, закрепленное на датчике усилия, установленном на основании, имеющем привод с датчиком перемещения для перемещения стола с образцом в вертикальном направлении из исходной позиции до положения определения момента касания или стартовой позиции, а затем, после проведения пенетрации, до конечной позиции, отличающееся тем, что рабочее тело неподвижно, а перемещается стол с образцом испытуемого материала.
| Устройство защиты для предупреждения несчастных случаев при обрыве проводов высоковольтных линий передачи радиовещания | 1952 |
|
SU96428A1 |
| Самопогружающийся ковш для рытья в связных грунтах ям, предназначенных под посадку деревьев | 1952 |
|
SU96429A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ РЕЛЬЕФА ПОВЕРХНОСТИ И МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛОВ | 2010 |
|
RU2442131C1 |
| GB 1343607 A, 16.01.1974. | |||

