Изобретение относится к испытательной технике, а именно к автоматическому измерению прочностных свойств материалов при вдавливании наконечников испыта- тельных устройств в испытываемый продукт, преимущественно битумы, парафины.
Цель изобретения - повышение точности пенетрометра и обеспечение автоматизации процесса испытаний.
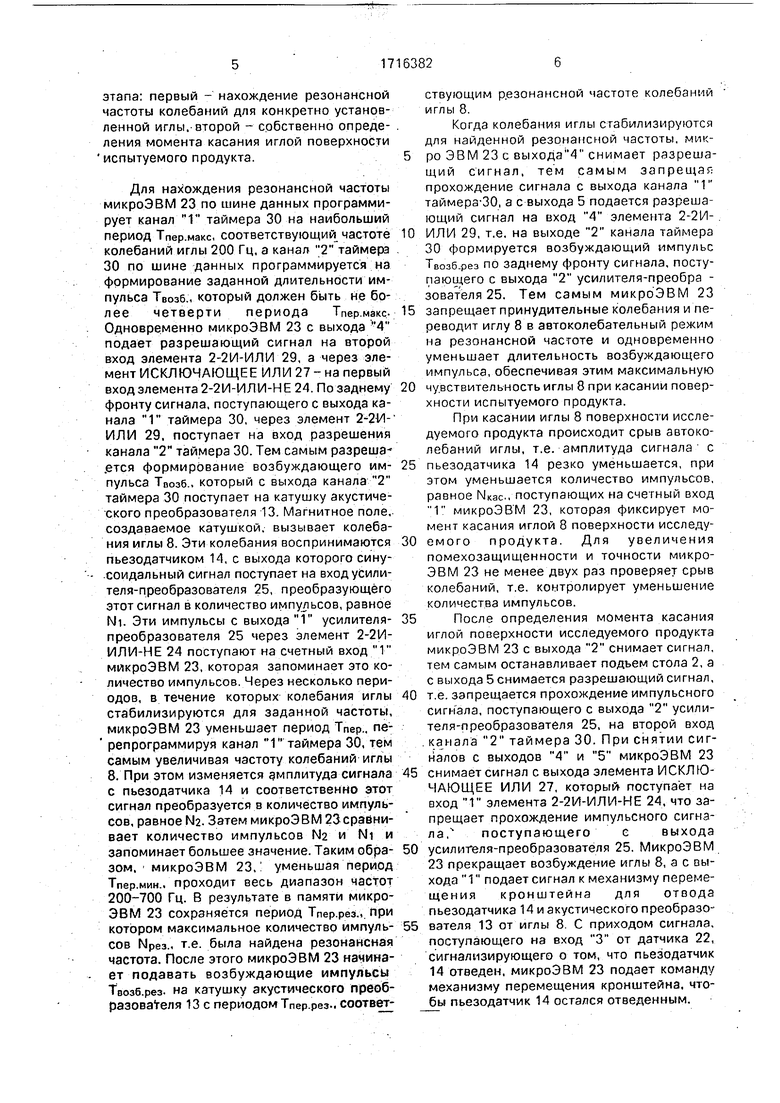
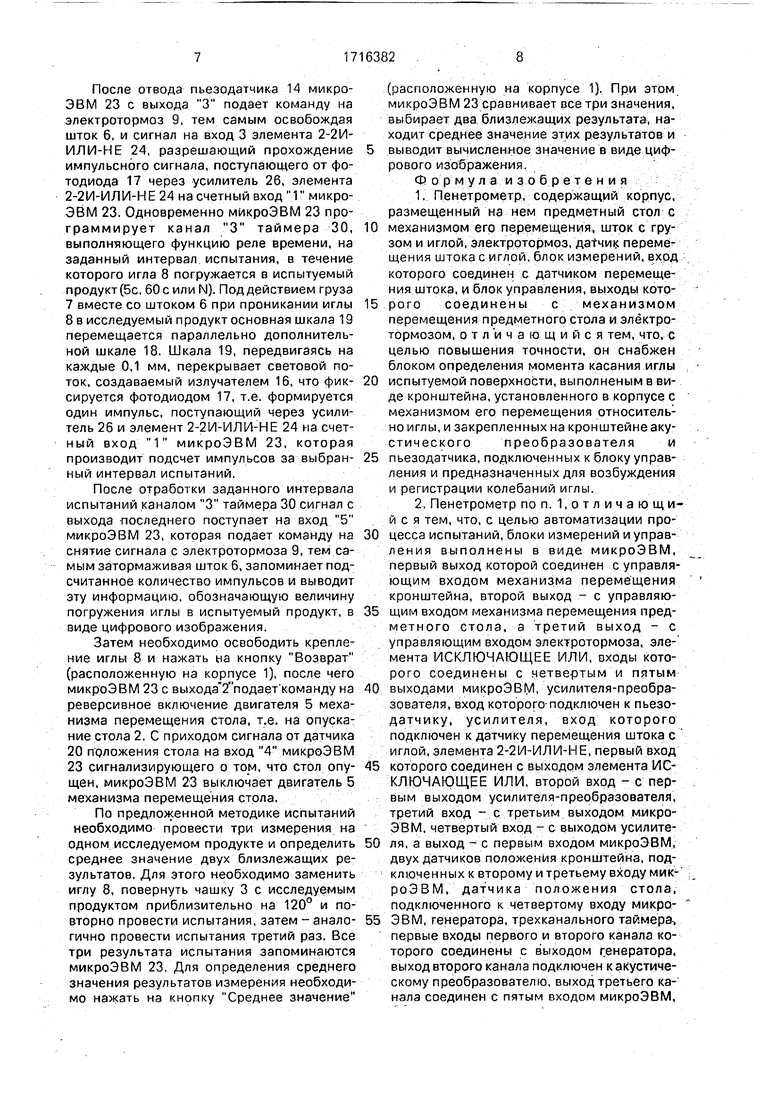
На фиг. 1 изображен пенетрометр, общий вид; на фиг. 2 - датчик перемещения штока с иглой; на фиг. 3 - функциональная схема блока управления, на фиг. 4 - конструкции игл.
Пенетрометр содержит корпус 1, в нижней части которого размещен предметный стол 2 с механизмом его перемещения. На стол 2 устанавливается чашка 3 с испытуемым продуктом. Механизм перемещения стола 2 включает в себя механизм 4 привода стола и двигатель 5. В верхней части корпуса 1 установлен шток 6 с грузом 7 и иглой 8, электротормоз 9,. датчик 10 перемещения штока 6 с иглой 8.
Пенетрометр снабжен кнопкой Пуск 11, расположенной на корпусе 1, блоком определения момента касания иглы испытуемой поверхности, блоком управления и блоком измерения.
Блок определения момента касания иглы испытуемой поверхности выполнен в виде кронштейна 12, установленного в корпусе 1, с механизмом его перемещения относительно иглы, и закрепленных на кронштейне акустического преобразователя 13 и пьезодатчика 14. Механизм перемещения кронштейна включает в себя двигатель 15.
Датчик 10 перемещения штока б с иглой 8 включает встроенный в корпус 1 излучатель 16 и фотодиод 17 с дополнительной шкалой 18, установленной на расстоянии 0,1 мм от закрепленной на штоке 6 параллельно ему основной шкалы 19. Шкала 19 представляет собой стеклянную пластинку с делениями, нанесенными через 0,1 мм. Дополнительная шкала 18 имеет ту же цену деления 0,1 мм.
Блок управления включает в себя датчик 20 положения стола, датчики 21 и 22 положения кронштейна, микроЭВМ 23, которая первым входом через элемент 2-2И- И/Ш-НЕ 24 подключена к усилителю-преобразователю 25 и усилите- лю 26, элемент исключающее ИЛИ 27, генератор 28, элемент 2-2И-ИЛИ 29, который подключен к трехканальному таймеру 30.
Блок измерения состоит из микроЭВМ 2.31 усилителя 26, вход которого подключен
к датчику 10 перемещения штока, элемента
.24. Л У . ..: У. У . , .; : уу ;.У;
Пенетрометр работает следующим образом.
В исходном положении шток 6 поднят,
предметный стол 2 опущен, пьёзодатчик 14 отведен, на стол 2 устанавливается чашка 3 с испытуемым продуктом, залитым водой (вода используется в качестве теплоносителя).
При включении пенетрометра в работу кнопкой Пуск 11, расположенной на корпусе 1, микроЭВМ 23 анализирует состояние датчиков 20-22 и. если пьёзодатчик 14
отведен, а стол 2 опущен, микроЭВМ 23 с выхода 2 подает сигнал к механизму перемещения стола, который начинает его подъем, а с выхода 1 подается сигнал к ; механизму перемещения кронштейна, который начинает подводить пьёзодатчик 14 и акустический преобразователь 13. установленные на кронштейне 12, к игле 8. После касания пьезодатчиком 14 иглы 8 срабатывает датчик 21, с выхода последнего сигнал
поступает на вход 2 микроЭВМ 23, которая снимает сигнал с выхода 21, т.е. останавливает механизм перемещения кронштейна 12.
Первоначально микроЭВМ 23 должна
определить момент касания иглой 8 поверхности исследуемого продукта. Для этого необходимо подавать на катушку акустического преобразователя 13 электрические импульсы, заставляя колебаться иглу 8 на
резонансной частоте. Акустические колебания иглы 8 воспринимаются пьезодатчиком 14, электрическое напряжение которого через усилитель 25 усиливается и преобразовывается : в импульсные сигналы,поступающие на вход 1 микроЭВМ 23, которая анализирует их. При касании иглой 8 поверхности испытуемого продукта проис- ходит срыв резонансной частоты колебаний иглы. Этот момент фиксируется микроЭВМ
23, которая подает команду на прекращение подъема стола 2.
Учитывая тот факт, что для испытания различных продуктов с высокой вязкостью (битумы, парафины, церезины) диаметры и
длины игл различны, поэтому их резонансные частоты колеблются от 200 до 700 Гц. и если возбуждать иглу не на резонансной частоте, а близкой к ней, то чувствитель-, ность иглы при касании поверхности испьк
туемого продукта резко падает, тем самым снижается точность измерения (измерение производится в единицах пенетрации, одна единица пенетрации равна 0,1 мм). Поэтому процесс определения момента касания иг- лой испытуемой поверхности разбит на два
этапа: первый - нахождение резонансной частоты колебаний для конкретно установленной иглы.-второй - собственно опреде- ления момента касания иглой поверхности испытуемого продукта.
Для нахождения резонансной частоты микроЭВМ 23 по шине данных программирует канал 1 таймера 30 на наибольший период Тпер.макс, соответствующий частоте колебаний иглы 200 Гц, а канал 2 таймера 30 по шине данных программируется на формирование заданной длительности импульса Твозб., который должен быть не более четверти периода Тпермакс- Одновременно микроЭВМ 23 с выхода 4 подает разрешающий сигнал на второй вход элемента 2-2И-ИЛИ 29, а через элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 27 - на первый вход элемента 2-2И-И Л И-Н Е 24. По заднему фронту сигнала, поступающего с выхода канала 1 таймера 30, через элемент 2-2-ИИЛИ 29, поступает на вход разрешения канала 2 таймера 30. Тем самым разреша .ется формирование возбуждающего им- пульса Твозб., который с выхода канала 2 таймера 30 поступает на катушку акустического преобразователя 13. Магнитное поле, создаваемое катушкой, вызывает колебания иглы 8. Эти колебания воспринимаются пьезодатчиком 14, с выхода которого синусоидальный сигнал поступает на вход усилителя-преобразователя 25, преобразующего этот сигнал в количество импульсов, равное NI. Эти импульсы с выхода 1 усилителя- преобразователя 25 через элемент 2-2И- ИЛИ-НЕ 24 поступают на счетный вход Т микроЭВМ 23, которая запоминает это количество импульсов. Через несколько периодов, в течение которых колебания иглы стабилизируются для заданной частоты, микроЭВМ 23 уменьшает период Тпер.. перепрограммируя канал 1 таймера 30, тем самым увеличивая частоту колебаний иглы 8. При этом изменяется амплитуда сигнала с пьезодатчика 14 и соответственно этот сигнал преобразуется в количество импульсов, равное N2. Затем микроЭ ВМ 23 срЭЁни- вает количество импульсов N2 и NI и запоминает большее значение. Таким обра- зом, микроЭВМ 23, уменьшая период Тпер.мин.. проходит весь диапазон частот 200-700 Гц. В результате в памяти микро- ЭВМ 23 сохраняется период Тпер.рез.,. при котором максимальное количество импуль- сов Npea., т.е. была найдена резонансная частота. После этого микроЭВМ 23 начинает подавать возбуждающие импульсы Твозб.рез. на катушку акустического преоб- разоваУеля 13 с периодом Тпер.рез.. соответствующим резонансной частоте колебаний иглы 8.
Когда колебания иглы стабилизируются для найденной резонансной частоты, мик- ро ЭВМ 23 с выхода 4 снимает рэзреша щий сигнал, тем самым запрещая прохождение сигнала с выхода канала 1 таймера-30, а с выхода 5 подается разрешающий сигнал на вход 4 элемента 2-2ИИЛИ 29, т.е. на выходе 2 канала таймера 30 формируется возбуждающий импульс Твозб.рез по заднему фронту сигнала, поступающего с выхода 2 усилителя-преобра - зователя 25. Тем самым микроЭВМ 23 запрещает принудительные колебания и переводит иглу 8 в автоколебательный режим на резонансной частоте и одновременно уменьшает длительность возбуждающего импульса, обеспечивая этим максимальную чувствительность иглы 8 при касании поверхности испытуемого продукта.
При касании иглы 8 поверхности исследуемого продукта происходит срыв автоколебаний иглы, т.е. амплитуда сигнала с пьезодатчика 14 резко уменьшается, при этом уменьшается количество импульсов, равное NKac., поступающих на счетный вход 1 микроЭВ М 23, которая фиксирует момент касания иглой 8 поверхности исследуемого продукта. Для увеличения помехозащищенности и точности микро- ЭВМ 23 не менее двух раз проверяет срыв колебаний, т.е. контролирует уменьшение количества импульсов.
После определения момента касания иглой поверхности исследуемого продукта микроЭВМ 23 с выхода 2 снимает сигнал, тем самым останавливает подьем стола 2, а с выхода 5 снимается разрешающий сигнал, т.е. запрещается прохождение импульсного сигнала, поступающего с выхода 2 усилителя-преобразователя 25, на второй вход . канала 2 таймера 30. При снятии сигналов с выходов 4 и 5 микроЭВМ 23 снимает сигнал с выхода элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 27, который- поступает на вход 1 элемента 2-2И-ИЛИ-НЕ 24, что запрещает прохождение импульсного сигнала,4 поступающего с выхода усилителя-преобразователя 25. МикроЭВМ 23 прекращает возбуждение иглы 8, а с выхода 1 подает сигнал к механизму перемещения кронштейна для отвода пьезодатчика 14 и акустического преобразователя 13 от иглы 8. С приходом сигнала, поступающего на вход 3 от датчика 22, сигнализирующего о том, что пьезодатчик 14 отведен, микроЭВМ 23 подает команду механизму перемещения кронштейна, чтобы пьезодатчик 14 остался отведенным.
После отвода пьезодатчика 14 микро- ЭВМ 23 с выхода 3 подает команду на электротормоз 9, тем самым освобождая шток 6, и сигнал на вход 3 элемента 2-2И- ИЛИ-НЕ 24, разрешающий прохождение импульсного сигнала, поступающего от фотодиода 17 через усилитель 26, элемента 2-2И-ИЛИ-НЕ24 на счетный вход 1 микро- ЭВМ 23. Одновременно микроЭВМ 23 программирует канал 3 таймера 30, выполн-яющего функцию реле времени, на заданный интервал испытания, в течение которого игла 8 погружается в испытуемый продукт (5с. 60 с или N). Под действием груза
7вместе со штоком 6 при проникании иглы
8в исследуемый продукт основная шкала 19 перемещается параллельно дополнительной шкале 18. Шкала 19, передвигаясь на каждые 0,1 мм, перекрывает световой поток, создаваемый излучателем 16, что фиксируется фотодиодом 17, т.е. формируется один импульс, поступающий через усилитель 26 и элемент 2-2И-ИЛИ-НЕ 24 на счетный вход 1 микроЭВМ 23, которая производит подсчет импульсов за выбранный интервал испытаний.
После отработки заданного интервала испытаний каналом 3 таймера 30 сигнал с выхода последнего поступает на вход 5 микроЭВМ 23, которая подает команду на снятие сигнала с электротормоза 9, тем самым затормаживая шток 6, запоминает подсчитанное количество импульсов и выводит эту информацию, обозначающую величину погружения иглы в испытуемый продукт, в виде цифрового изображения.
Затем необходимо освободить крепление иглы 8 и нажать на кнопку Возврат (расположенную на корпусе 1), после чего микроЭВМ 23 с выхода 2 подает команду на реверсивное включение двигателя 5 механизма перемещения стола, т.е. на опускание стола 2. С приходом сигнала от датчика 20 положения стола на вход 4 микроЭВМ 23 сигнализирующего о том, что стол опущен, микроЭВМ 23 выключает двигатель 5 механизма перемещения стола.
По предложенной методике испытаний необходимо провести три измерения на одном, исследуемом продукте и определить среднее значение двух близлежащих результатов. Для этого необходимо заменить иглу 8, повернуть чашку Зс исследуемым продуктом приблизительно на 120° и повторно провести испытания, затем - аналогично провести испытания третий раз. Все три результата испытания запоминаются микроЭВМ 23. Для определения среднего значения результатов измерения необходимо нажать на кнопку Среднее значение
(расположенную на корпусе 1). При этом микроЭВМ 23 сравнивает все три значения, выбирает два близлежащих результата, находит среднее значение этих результатов и выводит вычисленное значение в виде цифрового изображения.
Формул а изоб ретени я
1.Пенетрометр, содержащий корпус, размещенный на нем предметный стол с
0 механизмом его перемещения, шток с грузом и иглой, электрртормрз, датчик перемег щения штока с иглой, блок измерений, вход
которого соединен с датчиком перемещения штока, и блок управления, выходы кото5 рого соединены с механизмом перемещения предметного стола и элёктро- тормозом, отличающийся тем, что, с целью повышения точности, он снабжен блоком определения момента касания иглы :
0 испытуемой поверхности, выполненым в виде кронштейна, установленного в корпусе с механизмом его перемещения относитель1 но иглы, и закрепленных на кронштейне аку- стического преобразователя и
5 пьезодатчика, подключенных к блоку управления и предназначенных для возбуждения и регистрации колебаний иглы.
2.Пенетрометр по п. 1, о т л и ч а ю щи- й с я тем, что, с целью автоматизации про0 цесса испытаний, блоки измерений и управления выполнены в виде микроЭВМ, первый выход которой соединен с управляющим входом механизма перемещения кронштейна, второй выход - с управляю5 щим входом механизма перемещения предметного стола, а третий выход - с управляющим входом электротормоза, эле- мента ИСКЛЮЧАЮЩЕЕ ИЛИ, входы которого соединены с .четвертым и пятым
0 выходами микроЭВМ, усилителя-преобразователя, вход которого-подключен к пьезо- датчику, усилителя, вход которого подключен к датчику перемещения штока с иглой, элемента 2-2И-ИЛИ-НЕ, первый вход
5 которого соединен с выходом элемента ИС- КЛЮЧАЮЩЕЕ ИЛИ, второй вход - с первым выходом усилителя-преобразователя, третий вход - с третьим выходом микро- ЭВМ, четвертый вход - с выходом усилите0 ля, а выход - с первым входом микроЭВМ,
двух датчиков положения кронштейна, под: ключенных к второму и третьему входу микроЭВМ. датчика положения стола,
подключенного к четвертому входу микро5 ЭВМ, генератора, трехканального таймера, первые входы первого и второго канала которого соединены с выходом генератора, выход второго канала подключен к акустическому преобразователю, выход третьего канала соединен с пятым входом микроЭВМ,
а вторые входы первого и третьего канала подключены к плюсу источника питания, и элемента 2-2И-ИЛИ, первый вход которого соединен с первым входом третьего канала таймера и выходом его первого канала, второй вход-с четвертым выходом микроЭВМ,
третий вход,- с вторым выходом усилителя преобразователя, четвертый вход - с пятым выходом микроЭВМ, а выход - с вторым входом второго канала таймера, причем микроЭВМ и таймер соединены между собой общей шиной данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ РАСХОДОМ РАБОЧЕЙ ЖИДКОСТИ ПОЛЕВЫМИ ОПРЫСКИВАТЕЛЯМИ С КОРРЕКЦИЕЙ НА КОНЦЕНТРАЦИЮ РАСТВОРА | 1992 |
|
RU2048098C1 |
| Цифровое устройство для управления машиной непрерывного литья заготовок | 1989 |
|
SU1632621A1 |
| Устройство для поверки пьезоэлектрических датчиков давления | 1990 |
|
SU1796591A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОКАНАЛЬНЫМ ВИБРОСТЕНДОМ | 1998 |
|
RU2159949C2 |
| УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ РАСХОДОМ СЕМЯН ПНЕВМАТИЧЕСКОЙ СЕЯЛКОЙ | 1992 |
|
RU2043006C1 |
| Гидростатический датчик уровня жидкости | 1991 |
|
SU1809317A1 |
| Устройство для управления процессом контактной точечной сварки | 1990 |
|
SU1743766A1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА РАБОТЫ МАШИН С ДИСКОВЫМИ РАБОЧИМИ ОРГАНАМИ ПРИ ВНЕСЕНИИ СЫПУЧИХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2019948C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
Изобретение относится к испытательной технике,.а именно к измерению прочностных свойств материалов при вдавливании наконечника в испытываемый продукт. Цель изобретения - повышение точности и автоматизация процесса испытаний. Пенетрометр содержит корпус 1, в нижней части которого размещен предметный стол 2 с механизмом его перемещения. Шток 6 с грузом 7 и иглой 8, датчик 10 перемещения штока, блок измерения и блок управления. Повышение точности достигается за счет более точного определения момента касания иглы 8 поверхности испытуемого продукта, что достигается с помощью блока определения момента касания иглы испытуемой поверхности путем возбуждения и регистрации колебаний иглы. Автоматизация процесса испытаний достигается за счет того, что блоки измерения и управления выполнены в виде микроЭВМ, с помощью которой осуществляется управление всеми элементами прибора и регистрация всех контролируемых параметров.1 з.п. ф-лы, 4 ил. СП С о со 00 го Шиг.1
3fe3
Ф.и е. 4
V
| Электроакустический твердомер | 1985 |
|
SU1242751A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пенетрометр | 1976 |
|
SU732733A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
