Изобретение относится к области машиностроения, а именно к промышленным тракторам и другим гусеничным машинам, в том числе быстроходным, с бесступенчатой внешне регулируемой трансмиссией.
Известно техническое решение, в котором моторно-трансмиссионная установка (МТУ) промышленного трактора состоит из двигателя внутреннего сгорания, гидротрансформатора, коробки передач и двух бортовых редукторов. [Промышленные тракторы. Ю.В. Гинзбург и др. Изд. Машиностроение. Москва, - 1986 г.].
Недостатками такого решения являются невозможность внешнего бесступенчатого управления трансмиссией, в силу специфики работы гидротрансформатора, а также необходимость раздельного, независимого друг от друга управления ДВС и КПП.
Известно также техническое решение, наиболее близкое к заявляемому устройству, в котором МТУ состоит из ДВС, гидрообъемных передач (двух регулируемых насосов и двух регулируемых моторов) (ГОП) и двух бортовых редукторов, контроллера, управляющего ГОП, связанного с джойстиком и ГОП электрическими связями [https://tm10.ru/catalog/buld18/gst20/; https://tm10.ru/].
Недостатком такого решения также является необходимость раздельного, независимого друг от друга управления ДВС и КПП
Известен способ управления МТУ, состоящий в независимом управлении ППТ ДВС и выбором номера передачи в КПП [Военные гусеничные машины: Учебник / В 4-х т.Т. 1. Устройство. Кн. 2. - М.: МГТУ им. Н.Э. Баумана. 1990, стр. 244].
Недостатком такого способа управления является необходимость одновременного ручного управления двумя агрегатами МТУ невозможность достижения минимального расхода топлива как в среднем за цикл (смену), так и в режиме on-line.
Известен также способ управления МТУ, наиболее близкий к заявляемому способу, состоящий в независимом управлении оператором педалью подачи топлива (ППТ) ДВС и выбором передаточного числа электромеханической трансмиссии через джойстик и контроллер [Имитационное моделирование движения быстроходной гусеничной машины с электрической трансмиссией / Б.Н. Гомберг, С.В. Кондаков, Л.С. Носенко, О.О. Павловская // Вестник ЮУрГУ. Серия «Энергетика». - 2012. - Вып.18. - №37 (296). - Челябинск: Изд. ЮУрГУ. - С. 73-81].
Недостатком такого способа управления также является невозможность достижения минимального расхода топлива как в среднем за цикл (смену), так и в режиме on-line.
Технический результат группы изобретений заключается в снижении расхода топлива для выполнения заданной работы.
Также технический результат группы изобретений состоит в обеспечении максимальной скорости движения (в технологическом процессе или при откате) при заданном уровне мощности процесса.
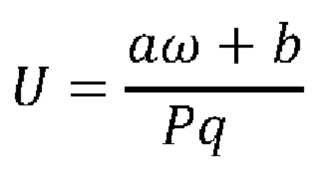
Поставленный результат достигается тем, что способ управления МТУ промышленного трактора заключается в одновременном изменении положения наклонной шайбы ГОП и положения ППТ ДВС, для чего в конструкцию дополнительно устанавливают датчик давления, которым непрерывно измеряют давление в магистрали высокого давления ГОП и устанавливают расход насоса ГОП по формуле:

где U - относительный параметр регулирования насоса ГОП;
 , b - коэффициенты аппроксимации экономичной характеристики ДВС;
, b - коэффициенты аппроксимации экономичной характеристики ДВС;
ω - частота вращения коленчатого вала ДВС;
Р - давление в магистрали высокого давления ГОП;
q - объемная постоянная насоса ГОП, так, что обеспечивают постоянную работу ДВС по экономичной характеристике.
Поставленный результат так же достигается следующим образом: ДВС имеет экономичную характеристику, аппроксимированную зависимостью крутящего момента от частоты вращения коленчатого вала ДВС, датчик давления постоянно передает информацию к внешнему управляющему устройству (ВУУ), которое по формуле (1) вычисляет относительный параметр регулирования насоса ГОП. Надо отметить, что скорость движения при выполнении, например, бульдозирования постоянно меняется в зависимости от внешних условий, поэтому требовать сохранения постоянной скорости абсурдно, а вот поддержание максимально возможной, да еще без вмешательства механика-водителя - вполне оправдано.
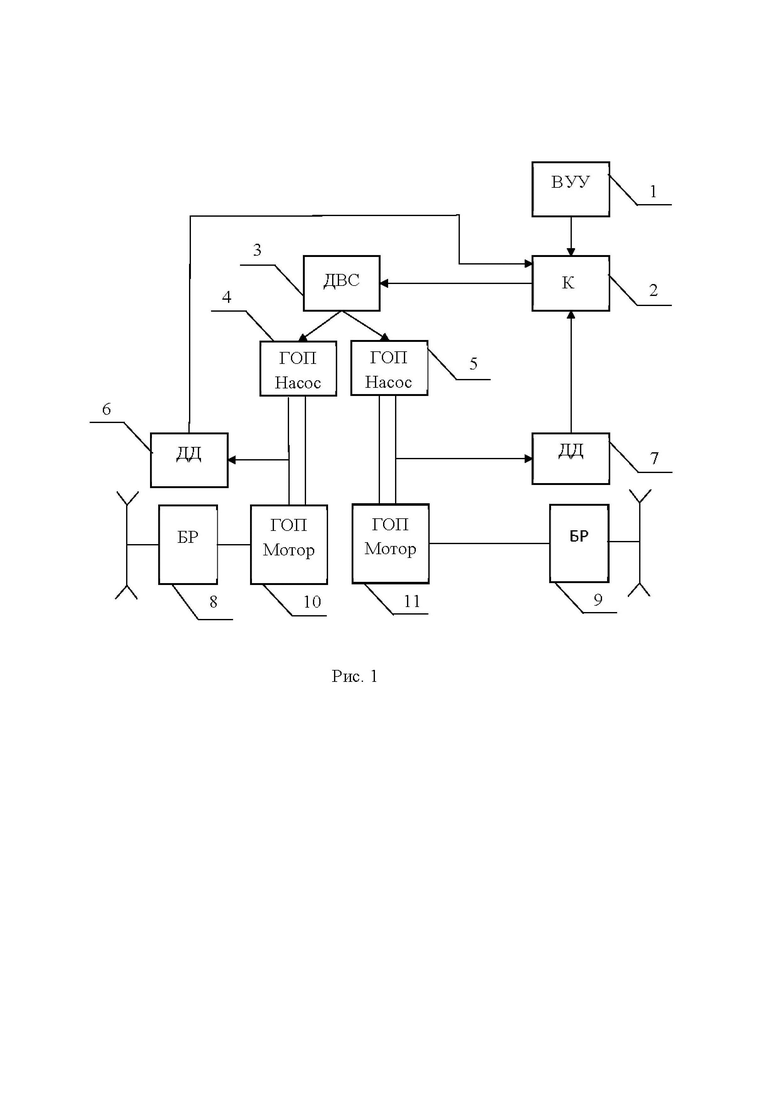
Сущность изобретения поясняется графическим материалом (рис. 1), где представлена принципиальная схема работы управления моторно-трансмиссионной установкой промышленного трактора с бесступенчатой трансмиссией. Установка включает в себя: двигатель внутреннего сгорания (ДВС) 3, две бортовые гидрообъемные передачи, каждая из которых включает в себя: ГОП насос 4, ГОП насос 5, ГОП мотор 10, ГОП мотор 11, контроллер К 2 и внешнее управляющее устройство ВУУ 1; два датчика давления ДД 6 и ДД 7, которые связаны с ГОП и ВУУ электрическими каналами.
Заявленным способом и устройством управления моторно-трансмиссионной установкой промышленного трактора с бесступенчатой трансмиссией обеспечивается управление двигателем и трансмиссией, то есть движением промышленного трактора, одним джойстиком при снижении расхода топлива на 1,5…2%.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОТОРНО-ТРАНСМИССИОННАЯ УСТАНОВКА РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2558416C1 |
| ТРАКТОР С РЕГИСТРАТОРОМ ПАРАМЕТРОВ | 2014 |
|
RU2542571C1 |
| Дифференциальный механизм поворота мобильной машины и способ управления дифференциальным механизмом поворота | 2020 |
|
RU2805453C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КАЛИБРОВКИ СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОМЫШЛЕННОГО ТРАКТОРА С ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИЕЙ | 2024 |
|
RU2827913C1 |
| Трансмиссия гусеничного транспортного средства | 1990 |
|
SU1766759A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ПОВОРОТА МОБИЛЬНОЙ МАШИНЫ И СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНЦИАЛЬНЫМ МЕХАНИЗМОМ ПОВОРОТА | 2019 |
|
RU2721207C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПРИВОДА ВЕНТИЛЯТОРА СИСТЕМЫ ОХЛАЖДЕНИЯ СИЛОВОЙ УСТАНОВКИ | 2023 |
|
RU2812542C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ С ЦЕНТРАЛЬНОЙ СОСТАВНОЙ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2438908C1 |
| ДВУХПОТОЧНАЯ ТРАНСМИССИЯ ТАНКА | 2017 |
|
RU2652542C1 |
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
Изобретение относится к устройству и способу управления гидростатической трансмиссии. Способ управления моторно-трансмиссионной установкой промышленного трактора заключается в одновременном изменении положения наклонной шайбы гидрообъемной передачи и положения педали подачи топлива ДВС. Для чего в конструкцию дополнительно устанавливают датчик давления, которым непрерывно измеряют давление в магистрали высокого давления ГОП и устанавливают расход насоса ГОП по формуле:
где U - относительный параметр регулирования насоса ГОП; a, b - коэффициенты аппроксимации экономичной характеристики ДВС; ω - частота вращения коленчатого вала ДВС; Р - давление в магистрали высокого давления ГОП; q - объемная постоянная насоса ГОП, так, что обеспечивают постоянную работу ДВС по экономичной характеристике. Достигается снижение расхода топлива и обеспечивается максимальная скорость движения при заданном уровне мощности процесса. 2 н.п. ф-лы, 1 ил.
1. Способ управления моторно-трансмиссионной установкой промышленного трактора, включающей в себя двигатель внутреннего сгорания и гидростатическую трансмиссию, отличающийся тем, что с целью повышения топливной экономичности двигателя внутреннего сгорания режим его работы определяют не только по положению ППТ, но еще и по расходу насоса ГОП, для чего дополнительно непрерывно измеряют давление в магистрали высокого давления ГОП и устанавливают расход насоса ГОП по формуле:

где U - относительный параметр регулирования насоса ГОП;
а, b - коэффициенты аппроксимации экономичной характеристики ДВС;
ω - частота вращения коленчатого вала ДВС;
Р - давление в магистрали высокого давления ГОП;
q - объемная постоянная насоса ГОП, так что обеспечивают постоянную работу ДВС по экономичной характеристике.
2. Устройство для реализации предлагаемого способа управления моторно-трансмиссионной установкой промышленного трактора с гидростатической трансмиссией, состоящее из двигателя внутреннего сгорания (ДВС), двух бортовых гидрообъемных передач (ГОП), каждая из которых включает в себя насос и мотор, контроллера и внешнего управляющего устройства (ВУУ), например джойстика, соединенного с контроллером, ДВС и ГОП электрическими каналами, отличающееся тем, что с целью повышения топливной экономичности устройство дополнительно снабжено датчиком давления, связанным с ГОП и ВУУ электрическими каналами.
| Способ управления тракторной моторно-трансмиссионной установкой | 1984 |
|
SU1257263A1 |
| Способ регулирования рабочих процессов землеройно-транспортной машины | 1985 |
|
SU1315571A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СИСТЕМЫ ГИДРАВЛИЧЕСКОГО ПРИВОДА (ВАРИАНТЫ) | 2017 |
|
RU2735754C2 |
| US 10496125 B1, 03.12.2019. | |||

