Группа изобретений относится к области машиностроения, а именно к трансмиссиям мобильных машин, в частности промышленных тракторов, и может быть использована в дифференциальных механизмах поворота мобильных машин.
Известен дифференциальный механизм поворота гусеничной машины, содержащий гидрообъемную передачу (далее ГОП), нерегулируемый мотор которой соединен через вал подкрутки с двумя суммирующими дифференциальными механизмами (СДМ) и бортовыми редукторами, а регулируемый насос ГОП соединен с коленчатым валом двигателя внутреннего сгорания (ДВС) [Теория движения танков и БМП: Учебник / М.: Военное издательство. 1984, стр. 166].
Недостатком такого механизма поворота является самопроизвольное изменение радиуса поворота гусеничной машины при изменении сопротивления движению. При росте сопротивления движению уменьшается скорость турбины гидротрансформатора, а скорость ДВС сохраняется. При этом линейная скорость трактора уменьшается, а угловая - остается постоянной. Поэтому при постоянном положении штурвала произвольно изменяется траектория движения, т.к. радиус траектории - это линейная скорость, деленная на угловую.
Наиболее близким к заявляемому изобретению является дифференциальный механизм поворота гусеничной машины, содержащий ГОП, нерегулируемый мотор которой соединен через вал подкрутки с двумя суммирующими дифференциальными механизмами, и бортовыми редукторами, а регулируемый насос ГОП соединен с турбиной гидротрансформатора (ГТ) [Военные гусеничные машины: Учебник / В 4-х т. Т. 1. Устройство. Кн. 2. - М.: МГТУ им. Н.Э. Баумана. 1990, стр. 223].
Недостатком такого механизма поворота является его низкий КПД, так как мощность двигателя внутреннего сгорания, затрачиваемая на поворот гусеничной машины, проходит последовательно не только через ГОП, но и через гидротрансформатор.
Известен способ управления дифференциальным механизмом поворота гусеничной машины, заключающийся в формировании угла поворота наклонной шайбы насоса ГОП пропорционально углу поворота штурвала управления поворотом [Сергеев Л.В. Теория танка. Москва. Издание Академии. 1973. - стр. 307].
Недостатком такого способа являются значительные погрешности в управлении механизмом поворота.
Наиболее близким к заявляемому изобретению является способ управления или дифференциальным механизмом поворота, заключающийся в измерении угловой скорости поворота корпуса гусеничной машины гироскопическим датчиком, сравнении ее с угловой скоростью поворота, заданной штурвалом, вычислении разности этих скоростей и внесении через обратную связь сигнала, корректирующего положение наклонной шайбы насоса ГОП [Кондаков СВ. Автоматизированное управление движением быстроходной гусеничной машины: монография / С.В. Кондаков, О.О. Павловская. - Saarbrucken: LAPLAMBERT Academic Publishing, 2013. - стр. 50-54].
Недостатком такого способа является уменьшение быстродействия управления за счет того, что в ближайшем аналоге управление осуществляется только по отклонению, при этом не учитывается управление по возмущению.
Решаемой технической задачей группы изобретений является повышение КПД дифференциального механизма поворота и быстродействия в его управлении.
Технический результат группы изобретений направлен на обеспечение постоянства радиуса поворота мобильной машины при неизменном положении ручки управления поворотом и изменяющемся сопротивлении движению.
Также технический результат группы изобретений заключается в повышении точности и быстродействия в управлении поворотом.
Для достижения указанного технического результата дифференциальный механизм поворота мобильной машины, как и наиболее близкий аналог, содержит в качестве источника энергии двигатель внутреннего сгорания и гидротрансформатор, вал подкрутки с реверс-редуктором, два суммирующих дифференциальных механизма, ручку управления поворотом и гидрообъемную передачу, включающую регулируемый насос и нерегулируемый мотор. Но, в отличие от наиболее близкого аналога, дифференциальный механизм поворота снабжен гироскопическим датчиком и микропроцессорным блоком управления наклонной шайбой регулируемого насоса, который соединен посредством электрических связей с ручкой управления поворотом, регулируемым насосом гидрообъемной передачи, насосом и турбиной гидротрансформатора и гироскопическим датчиком.
Указанный технический результат достигается также тем, что, как и наиболее близкий аналог, способ управления дифференциальным механизмом поворота мобильной машины заключается в изменении положения наклонной шайбы насоса гидрообъемной передачи для реализации заданного ручкой управления поворотом радиуса поворота. Но, в отличие от наиболее близкого аналога, в заявляемом способе также измеряют частоту вращения турбины и насоса гидротрансформатора, угловую скорость поворота, заданную ручкой управления поворотом, и угловую скорость поворота, измеряемую гироскопическим датчиком, и независимо от оператора, задающего ручкой управления поворотом радиус траектории движения мобильной машины, вычисляют сигнал, формирующий угол поворота наклонной шайбы насоса гидрообъемной передачи по формуле:

где  - относительное угловое положение наклонной шайбы насоса гидрообъемной передачи,
- относительное угловое положение наклонной шайбы насоса гидрообъемной передачи,  - относительное угловое положение ручки управления поворотом, iГТ - передаточное отношение ГТ, ωГК - угловая скорость поворота,
- относительное угловое положение ручки управления поворотом, iГТ - передаточное отношение ГТ, ωГК - угловая скорость поворота,
измеряемая гироскопическим датчиком, ωР - угловая скорость поворота, заданная ручкой управления поворотом, k - коэффициент усиления.
Наличие микропроцессорного блока управления в дифференциальном механизме поворота обеспечивает постоянство радиуса поворота мобильной машины при неизменном положении ручки управления поворотом управления и изменяющемся сопротивлении движению. Микропроцессорный блок управления получает информацию о положении ручки управления поворотом и о частотах вращения насоса и турбины гидротрансформатора, угловой скорости, заданной ручкой управления поворотом и угловой скорости, замеренной гироскопическим датчиком, и формирует на основе этой информации итоговый сигнал для определения положения наклонной шайбы насоса ГОП. Т.е. в заявляемой группе изобретений управление - комбинированное: управление по отклонению и управление по возмущению. Это повышает быстродействие, которое больше у способа управления по возмущению.
Сущность группы изобретений поясняется принципиальной схемой работы дифференциального механизма поворота мобильной машины, представленной на чертеже.
Привод дифференциального механизма поворота мобильной машины осуществляется двигателем внутреннего сгорания 1 и гидротрансформатором, включающим насос 2 и турбину 3. ГОП содержит регулируемый насос 4, нерегулируемый мотор 5 и микропроцессорный блок управления 6, который управляет положением наклонной шайбы регулируемого насоса 4. Механизм поворота содержит также два суммирующих дифференциальных механизма 7 и 8, ручку управления поворотом 9, вал подкрутки 10, реверс редуктор 11 вала подкрутки, гироскопический датчик 12, соединенный с микропроцессорным блоком управления 6.
Способ реализован в дифференциальном механизме поворота мобильной машины следующим образом: крутящий момент от двигателя внутреннего сгорания 1 передается насосу 2 гидротрансформатора и насосу 4 ГОП. Турбина 3 гидротрансформатора в свою очередь вращает эпициклические шестерни (на чертеже не показаны) суммирующих дифференциальных механизмов 7 и 8, а мотор 5 ГОП вращает солнечную шестерню (на чертеже не показана) суммирующего дифференциального механизма 8 и через реверс-редуктор 11 вала подкрутки 10 солнечную шестерню (на чертеже не показана) механизма 7. Гироскопический датчик 12 замеряет угловую скорость корпуса машины и передает сигнал в микропроцессорный блок управления 6.
Микропроцессорный блок управления 6 вычисляет передаточное отношение ГТ iГТ по формуле iГТ=ωТ/ωН где ωТ - частота вращения турбины гидротрансформатора, ωН - частота вращения насоса гидротрансформатора.
Микропроцессорный блок управления 6 также вычисляет интеграл от разности угловых скоростей, заданной ручкой управления поворота и замеренной гироскопическим датчиком 12. Далее полученный сигнал о передаточном отношении перемножает на сигнал о положении ручки управления поворота 9, складывает с интегралом разности угловой скорости поворота, заданной ручкой управления поворота и угловой скоростью поворота, измеряемой гироскопическим датчиком 12, и создает итоговый управляющий сигнал для наклонной шайбы насоса 4 ГОП по формуле:

Заявляемым способом и механизмом поворота мобильной машины обеспечивается повышение точности управления поворотом и быстродействия, а также обеспечивается постоянство радиуса поворота мобильной машины при неизменном положении ручки управления поворотом и изменяющемся сопротивлении движению.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциальный механизм поворота мобильной машины и способ управления дифференциальным механизмом поворота | 2020 |
|
RU2805453C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ДВИЖЕНИЯ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2011 |
|
RU2480361C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ С ЦЕНТРАЛЬНОЙ СОСТАВНОЙ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2438908C1 |
| БЕССТУПЕНЧАТЫЙ МЕХАНИЗМ ПОВОРОТА ГУСЕНИЧНОЙ МАШИНЫ | 2002 |
|
RU2298505C2 |
| МЕХАТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2013 |
|
RU2529929C1 |
| МЕХАТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2015 |
|
RU2645487C2 |
| БЕССТУПЕНЧАТЫЙ МЕХАНИЗМ ПОВОРОТА БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2003 |
|
RU2233760C1 |
| Стенд для испытания бесступенчатого дифференциального механизма поворота со следящей системой управления движением мобильных машин | 2019 |
|
RU2730800C1 |
| Способ и устройство управления моторно-трансмиссионной установкой промышленного трактора с бесступенчатой трансмиссией | 2022 |
|
RU2783552C1 |
| ДВУХПОТОЧНАЯ ТРАНСМИССИЯ ТРАНСПОРТНОЙ МАШИНЫ С БОРТОВЫМ СПОСОБОМ ПОВОРОТА | 2015 |
|
RU2599855C1 |
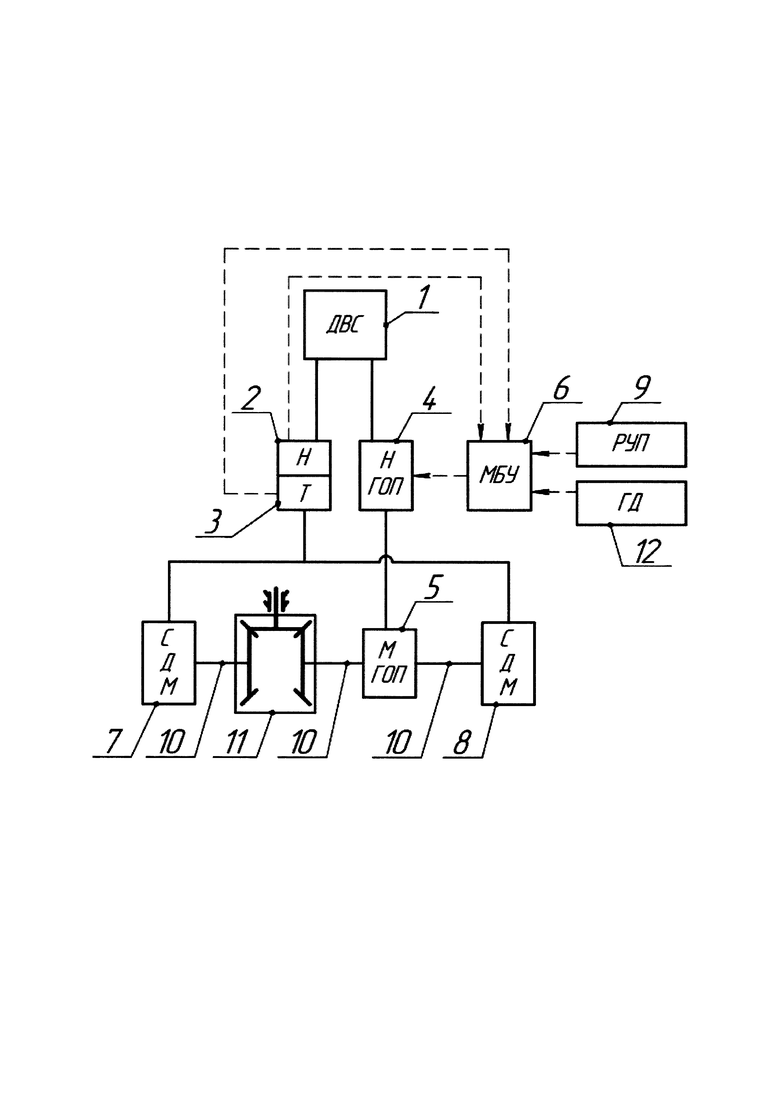
Группа изобретений относится к трансмиссиям мобильных машин. Привод дифференциального механизма поворота (ДМП) мобильной машины осуществляется двигателем внутреннего сгорания (1) и гидротрансформатором (ГТ), включающим насос (2) и турбину (3). Гидрообъемная передача (ГОП) содержит регулируемый насос (4), нерегулируемый мотор (5) и микропроцессорный блок управления (6), который управляет положением наклонной шайбы насоса (4). Механизм поворота содержит также два суммирующих дифференциальных механизма (СДМ) (7 и 8), ручку управления поворотом (9), вал подкрутки (10), реверс-редуктор (11) вала подкрутки, гироскопический датчик (12), соединенный с микропроцессорным блоком управления (6). Способ управления ДМП заключается в изменении положения наклонной шайбы ГОП для реализации заданного ручкой управления поворотом радиуса поворота. При этом измеряют частоту вращения турбины и насоса ГТ, угловую скорость поворота, заданную ручкой управления поворотом, и угловую скорость поворота, измеряемую гироскопическим датчиком. Независимо от оператора, задающего ручкой управления поворотом радиус траектории движения мобильной машины, вычисляют сигнал, формирующий угол поворота наклонной шайбы насоса ГОП по формуле:  где
где  - относительное угловое положение наклонной шайбы насоса ГОП,
- относительное угловое положение наклонной шайбы насоса ГОП,  - относительное угловое положение ручки управления поворотом, iГТ - передаточное отношение ГТ, ωГК - угловая скорость поворота, измеряемая гироскопическим датчиком, ωР - угловая скорость поворота, заданная ручкой управления поворотом, k - коэффициент усиления. Достигается повышение точности управления поворотом и быстродействия. 2 н.п. ф-лы, 1 ил.
- относительное угловое положение ручки управления поворотом, iГТ - передаточное отношение ГТ, ωГК - угловая скорость поворота, измеряемая гироскопическим датчиком, ωР - угловая скорость поворота, заданная ручкой управления поворотом, k - коэффициент усиления. Достигается повышение точности управления поворотом и быстродействия. 2 н.п. ф-лы, 1 ил.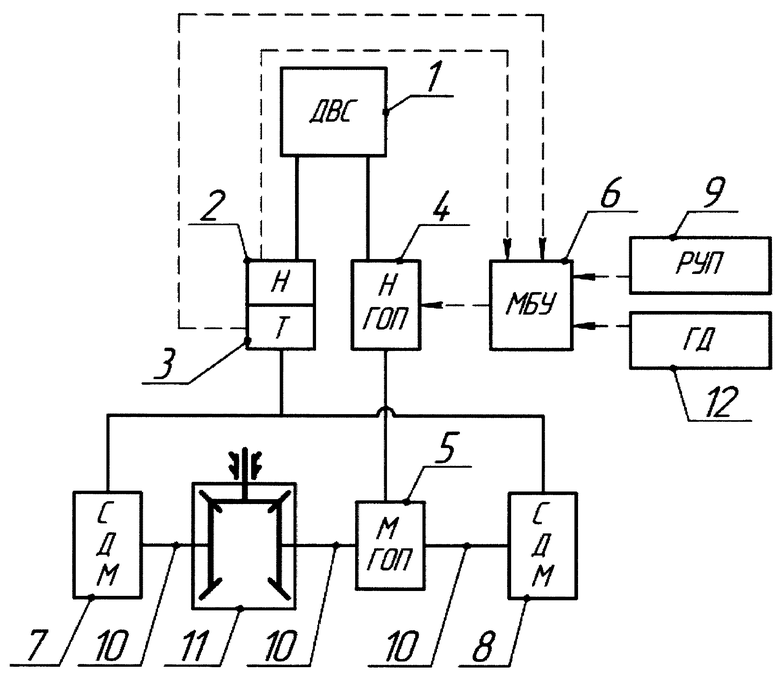
1. Дифференциальный механизм поворота мобильной машины, содержащий в качестве источника энергии двигатель внутреннего сгорания и гидротрансформатор, вал подкрутки с реверс-редуктором, два суммирующих дифференциальных механизма, ручку управления поворотом и гидрообъемную передачу, включающую регулируемый насос и нерегулируемый мотор, отличающийся тем, что дифференциальный механизм поворота снабжен гироскопическим датчиком и микропроцессорным блоком управления наклонной шайбой регулируемого насоса, который соединен посредством электрических связей с ручкой управления поворотом, регулируемым насосом гидрообъемной передачи, насосом и турбиной гидротрансформатора и гироскопическим датчиком.
2. Способ управления дифференциальным механизмом поворота мобильной машины, заключающийся в изменении положения наклонной шайбы насоса гидрообъемной передачи для реализации заданного ручкой управления поворотом радиуса поворота, отличающийся тем, что при этом измеряют частоту вращения турбины и насоса гидротрансформатора, угловую скорость поворота, заданную ручкой управления поворотом, и угловую скорость поворота, измеряемую гироскопическим датчиком, и независимо от оператора, задающего ручкой управления поворотом радиус траектории движения мобильной машины, вычисляют сигнал, формирующий угол поворота наклонной шайбы насоса гидрообъемной передачи по формуле:

где  - относительное угловое положение наклонной шайбы насоса гидрообъемной передачи,
- относительное угловое положение наклонной шайбы насоса гидрообъемной передачи,  - относительное угловое положение ручки управления поворотом, iГТ - передаточное отношение гидротрансформатора, ωГК - угловая скорость поворота, измеряемая гироскопическим датчиком, ωР - угловая скорость поворота, заданная ручкой управления поворотом, k - коэффициент усиления.
- относительное угловое положение ручки управления поворотом, iГТ - передаточное отношение гидротрансформатора, ωГК - угловая скорость поворота, измеряемая гироскопическим датчиком, ωР - угловая скорость поворота, заданная ручкой управления поворотом, k - коэффициент усиления.
| Трансмиссия гусеничной машины | 1981 |
|
SU996251A1 |
| МЕХАТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2015 |
|
RU2645487C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ПОВОРОТА ПРОПОРЦИОНАЛЬНОГО ИЗМЕНЕНИЯ СКОРОСТИ СТОРОН КОЛЕСНОГО ИЛИ ГУСЕНИЧНОГО ДВИЖИТЕЛЯ, СОХРАНЯЮЩЕГО НА ПОВОРОТАХ СРЕДНЮЮ СКОРОСТЬ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2604259C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОВОРОТОМ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1987 |
|
RU2109650C1 |
| ХИМИЧЕСКИЙ ОГНЕТУШИТЕЛЬ | 1926 |
|
SU4427A1 |

