Изобретение относится к области радиолокации и может быть использовано для определения координат аварийных подводных лодок (далее - аварийных объектов (АО)).
Известен способ передачи информации о координатах аварийной подводной лодки, лежащей на грунте, с помощью аварийно-спасательного буя. Способ заключается в механическом отделении аварийно-спасательного буя от корпуса аварийного объекта и всплытии на поверхность с последующей передачей сигналов от аварийного объекта [1]. Данный способ принят за прототип.
Недостатки способа, взятого в качестве прототипа, заключаются в ограниченной длине троса с помощью которого аварийно-спасательный буй крепится к аварийному объекту, а также невозможности работы аварийного маяка в арктических условиях при большой толщине льда в связи с плохой проводимостью сигнала при толщине льда свыше 1,5 метров. Недостаток длины троса, особенно проявляется, когда аварийный объект лежит на большой глубине.
Задачей изобретения является обеспечение передачи информации о местоположении аварийного объекта из-подо льда.
Задача решается тем, что в известном способе передачи информации о местонахождении аварийного объекта вместо аварийно-спасательного буя используется автономный необитаемый подводный аппарат (далее - АНПА), способный принимать координаты аварийного объекта, самостоятельно осуществлять поиск полыней для всплытия, а при их отсутствии осуществлять поиск наименее плотного ледяного покрова и производить его бурение для дальнейшей передачи информации о местонахождении аварийного объекта.
Новыми отличительными признаками способа являются:
- маневренность передатчика информации об аварийном объекте;
- возможность передавать информацию о состоянии и местоположении аварийного объекта в сложных ледовых условиях.
Указанные отличительные признаки содействуют поиску аварийных объектов в арктических условиях, что способствует увеличению шансов спасения человеческих жизней при возникновении аварийных ситуаций.
Способ передачи информации об аварийном объекте из-подо льда реализуется в следующей последовательности.
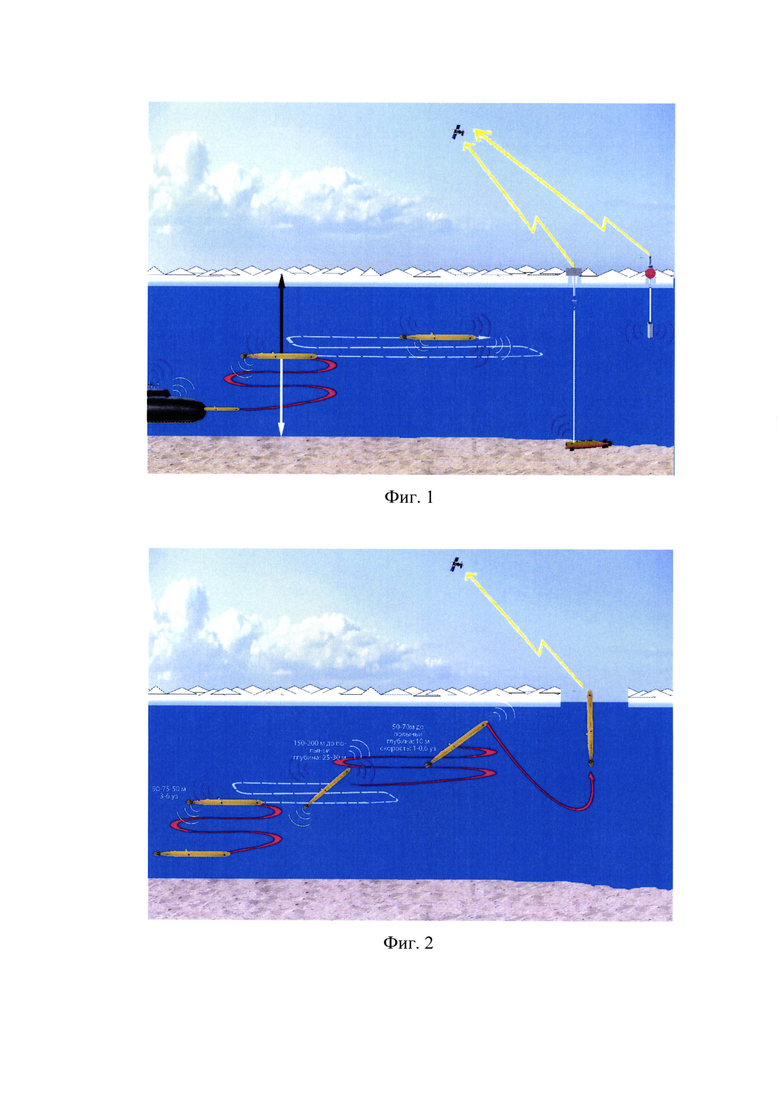
При возникновении на подводном объекте аварийной ситуации и принятии решения командира на выпуск АНПА, в бортовую аппаратуру аппарата дополнительно поступают данные о характере аварии и задается глубина хода АНПА (изначально введена глубина хода 75 метров).
После выхода АНПА из торпедного аппарата (контейнера, пусковой установки), он проводит контрольное взаимное гидроакустическое опознавание с АО, производит контрольный запуск маяка-ответчика (установленного на АО) и определяет относительный пеленг и дистанцию на маяк-ответчик. Занимает установленную глубину. Определяет толщину льда в данной точке и начинает маневрирование с задачей поиска полыньи или разводья средствами ледовой разведки, для самостоятельного всплытия с целью передачи донесения об аварии (Фиг. 1).
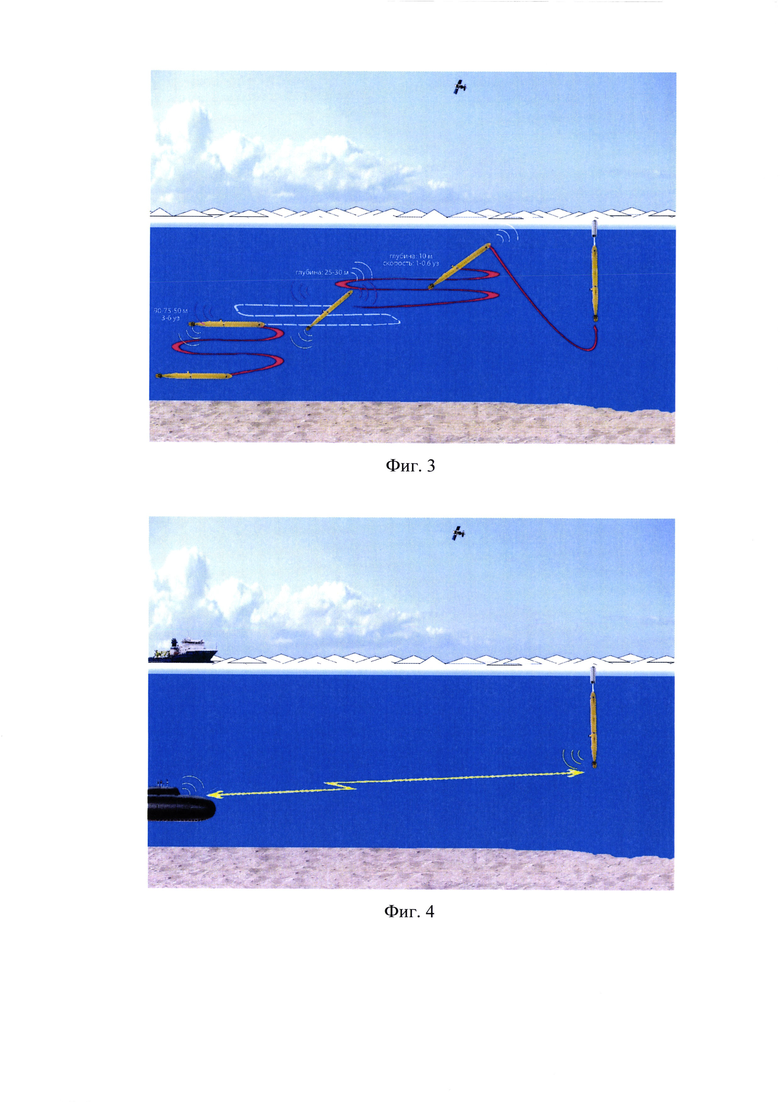
Обнаружение полыней, разводий, ровного тонкого льда или участка, пригодного для всплытия АНПА осуществляется многолучевым эхоледомером, позволяющим определить абсолютную толщину льда. При этом толщина льда заносится в память АНПА с координатами. При обнаружении полыньи (разводья) АНПА программно запоминает точку всплытия (пеленг и дистанцию до маяка-ответчика), производит маневрирование и, в случае отсутствия в районе всплытия, в радиусе 150-200 метров, торосов или других, влияющих на безопасность всплытия факторов, занимает вертикальное положение, всплывает в полынью, передает донесение об аварии АО и включает аварийный приводной маяк (Фиг. 2).
В случае если АНПА не находит места для всплытия на «чистой воде» в течение 1 часа после выхода из АО, дополнительный допоиск и маневр не осуществляется. Анализируется накопленный в памяти массив замеров толщин льда. Выбирается район площадью 5×5 замеров, в котором толщина льда наименьшая и изменяется не более, чем на 0,5 метра. АНПА следует в центр данного района (Фиг. 3).
АНПА дифферентуется, занимая строго вертикальное положение, выдвигает из носовой части четыре опоры длинной до 0,5 метра, способные закрепить АНПА неподвижно и вертикально подо льдом. Длина опор координируется следящей системой, сопряженной с гироскопическим прибором для удержания строго вертикального положения аппарата. После занятия АНПА вертикального фиксированного положения подо льдом, из его носовой части выдвигается шнековый бур, который завинчивается в лед на расстояние не менее 0,7 метра. При этом производится надежная фиксация АНПА на нижней поверхности льда (Фиг. 3).
После этого из шнекового бура выдвигается антенна-бур, которая просверливает лед на расстояние не менее 1,5 метров (среднее значение «насыщенного» слоя льда при среднем значении толщины льда в период его наибольшего значения - 3,6 метра). Двигатель АНПА увеличивает обороты, прилагая усилия для более прочного удержания аппарата подо льдом. АНПА передает сообщение об аварии, включает аварийный маяк-привод. В пространство вокруг антенны-бура подается сжатый воздух (Фиг. 3). При этом способе между АНПА и аварийным объектом постоянно поддерживается звукоподводная связь (Фиг. 4).
Технико-экономическое преимущество заявляемого способа передачи информации об аварийном объекте по сравнению с известным аналогом, принятым за прототип, заключается в возможности получения информации о местонахождении аварийного объекта в арктических условиях.
Литература:
1. Патент Российской Федерации №2299446 от 20.05.2007 «Способ поиска и подъема на поверхность моря затонувшего объекта, а также спасения людей, оказавшихся в нем».
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ПЕРЕДАЧИ ИНФОРМАЦИИ О СОСТОЯНИИ ПОДВОДНОЙ ЛОДКИ | 2021 |
|
RU2769806C1 |
| СПОСОБ ПРИМЕНЕНИЯ НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА ПОДО ЛЬДОМ | 2020 |
|
RU2757006C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ ПОДАЧИ СИГНАЛОВ ОБ АВАРИИ ПОДО ЛЬДОМ С ПОМОЩЬЮ ГИДРОАКУСТИЧЕСКОГО СИГНАЛИЗАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2520985C2 |
| СПОСОБ ОБНАРУЖЕНИЯ АВАРИЙНОГО ПОДВОДНОГО ОБЪЕКТА, ЛЕЖАЩЕГО НА ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2233230C2 |
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ ПРИ НАХОЖДЕНИИ ПОДВОДНОГО ОБЪЕКТА НА ГОРИЗОНТЕ ПЛАВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ ГИДРОАКУСТИЧЕСКОГО КАНАЛА ПЕРЕДАЧИ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2008 |
|
RU2398316C2 |
| СПОСОБ ОБОЗНАЧЕНИЯ ПОДВОДНОЙ ЛОДКОЙ ПОЛЫНЬИ | 2019 |
|
RU2733635C1 |
| КОНТРОЛИРУЕМЫЙ МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК | 2021 |
|
RU2766365C1 |
| ДВУХКАНАЛЬНЫЙ АВАРИЙНЫЙ МАЯК ДЛЯ ПОДВОДНОГО ОБИТАЕМОГО АППАРАТА | 2019 |
|
RU2735301C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
Изобретение относится к области поисково-спасательных работ и может быть использовано для определения координат аварийных подводных лодок. Предложен способ передачи информации об аварийной подводной лодке из-подо льда, который заключается в использовании автономного необитаемого подводного аппарата, выходящего самостоятельно или по команде с аварийного объекта, из торпедного отсека, способного принимать координаты аварийного объекта, осуществлять поиск полыней для всплытия, а при их отсутствии осуществлять поиск наименее плотного ледяного покрова и производить его бурение для дальнейшей передачи информации о местонахождении аварийного объекта. Предложенный способ содействует поиску аварийных объектов в арктических условиях, что способствует увеличению шансов спасения человеческих жизней при возникновении аварийных ситуаций. 4 ил.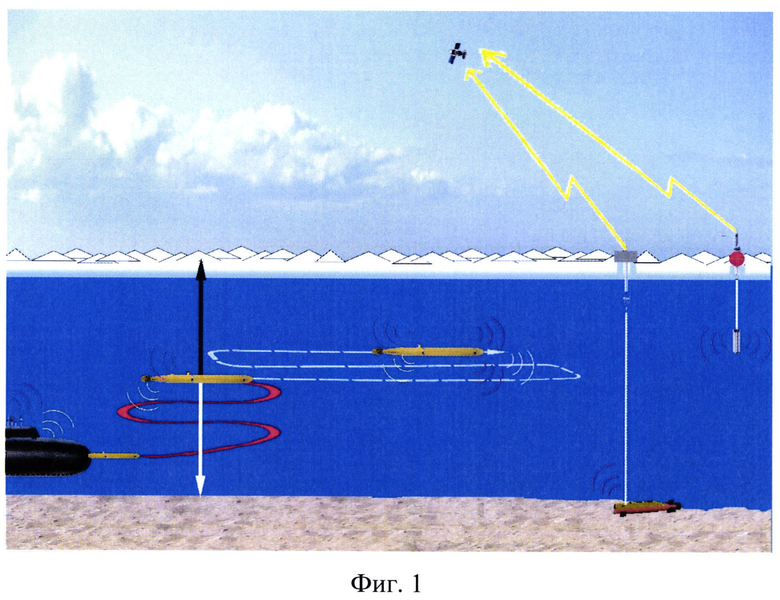
Способ передачи информации об аварийной подводной лодке из-подо льда, заключающийся в использовании автономного необитаемого подводного аппарата, выходящего самостоятельно или по команде с аварийного объекта, из торпедного отсека, способного принимать координаты аварийного объекта, осуществлять поиск полыней для всплытия, а при их отсутствии осуществлять поиск наименее плотного ледяного покрова и производить его бурение для дальнейшей передачи информации о местонахождении аварийного объекта.
| АВАРИЙНО-СИГНАЛЬНЫЙ БУЙ ДЛЯ ПРИМЕНЕНИЯ В ЛЕДОВЫХ УСЛОВИЯХ | 2015 |
|
RU2609841C1 |
| Станок для стрижки щеток | 1929 |
|
SU21898A1 |
| РАДИОБУЙ ДЛЯ ПЕРЕДАЧИ СИГНАЛОВ БЕДСТВИЯ ИЗ-ПОДО ЛЬДА | 2020 |
|
RU2737151C1 |
| US 5319376 A 07.06.1994 | |||
| US 5593332 A, 14.01.1997 | |||
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ | 1997 |
|
RU2119703C1 |

