Изобретение относится к области средств освоения мирового океана и проведения подводно-технических работ, в частности, к автономным необитаемым подводным аппаратам (АННА), используемым для передачи информации о состоянии подводной лодки в случае ее аварии, в том числе подо льдом.
Известны аппараты иностранного производства типа UARS (Underwater Arctic Research Submersibale) и SPURV (Self-Propeller Underwater Research Vehicle), выполненные по торпедной технологии в классической гидродинамической форме, аппараты ARCS (ARCtic System) - «Theseus» и «Explorer», оснащенные гидроакустической аппаратурой (акустические профилографы и эхолоты), направленной в сторону льда, и набором датчиков различного назначения, аппараты «ледового класса» - «Odyssey 2», позволяющие работать в условиях ледяного покрова и применяемые с надводных и авиационных носителей. Известны российские АНПА типа «Галтель», «Юнона» [1]. Известно использование аппарата типа Bluefin, позволяющего работать подо льдом и применяемого с подводного носителя. Данный АНПА является наиболее близким по технической сущности к заявляемому устройству и принят в качестве прототипа [2].
Основными недостатками прототипа являются невозможность всплытия в самостоятельно разведанной полынье и передачи информации из-подо льда при наличии сплошного ледяного массива.
Задачей предлагаемого изобретения является совершенствование конструкции АНПА, применяемого для передачи информации о состоянии подводной лодки в случае аварии при нахождении ее подо льдом (далее - АНПА ПЛ).
Задача решается тем, что для передачи информации из-подо льда используется АНПА, который имеет блоки и модули, входящие в известные АНПА (в большей степени в прототип), а именно: движительно-рулевой комплекс; модуль энергообеспечения; модуль управления, навигации и связи; модуль полезной нагрузки, аппаратуры и приборов, но усовершенствованный и включающий в себя: быстросъемный модуль гидрофона и аппаратуры подводной связи, соединенный с корпусом АНПА ПЛ разъемами поворотного типа; модуль аппаратуры, приборов и программно-аппаратного комплекса для поиска «чистой воды» и анализа массива льда, включающий устройство для передачи информации из-подо льда, вычислительный модуль для поиска «чистой воды», антенну-бур для бурения льда и выдвижные опоры для стабилизации АНПА ПЛ. Предложенный АНПА ПЛ, исполненный в габаритах торпеды, на ПЛ-носителе размещается в торпедном аппарате или внешнем контейнере в установленной готовности к немедленному применению.
Новыми отличительными признаками данного АНПА ПЛ являются:
- способность поддерживать в пределах дальности действия звукоподводную связь с аварийной подводной лодкой;
- возможность поиска «чистой воды» путем получения и обработки информации о состоянии поверхности водной среды;
- способность вырабатывать управляющие и выдавать разрешительные сигналы для выполнения маневров АНПА по курсу, глубине, приледнению или всплытию на «чистой воде», на дифферентовку АНПА и стабилизацию выдвижных опор;
- возможность размещения без изменения конструктива на подводных лодках (в штатных торпедных аппаратах).
Данные отличительные признаки обеспечивают: при отсутствии «чистой» воды - приледнение и возможность передачи информации о местонахождении аварийной подводной лодки из-подо льда. Вся информация основана на непрерывной трансляции в АНПА ПЛ текущих координат подводной лодки, среднеквадратической ошибки знания места, курса, относительной скорости и глубины подводной лодки.
Схема АНПА ПЛ представлена на чертеже.
К корпусу АНПА ПЛ (1), оснащенному движительно-рулевым комплексом (7), крепятся при помощи разъемов поворотного типа быстросъемный модуль гидрофона (2), программно-аппаратный комплекс поиска «чистой воды» и анализа массива толщины льда (3), модуль полезной нагрузки и аппаратуры подводной связи (4), модуль управления, навигации и связи (5), модуль энергообеспечения (6). При этом устройство конструкции включает в себя антенну-бур для бурения льда (8), выдвижные опоры для стабилизации АНПА ПЛ при приледнении (9), гироскопический прибор с блоком управления дифферентовочной системой и выдвижными опорами (10), а также саму дифферентовочную систему (11).
АНПА ПЛ может располагаться и вне прочного корпуса ГШ: в специальном контейнере или пусковой установке; в ограждении рубки или за ракетными шахтами (на креплении, подвеске и т.п.).
Применение АНПА ПЛ возможно по двум вариантам:
1. Вручную по команде (с полными данными).
2. Автоматически (с неполными данными), при срабатывании датчиков предельных параметров (давления в отсеках, предельно установленной глубине, ударе о грунт и т.п.).
При возникновении на подводной лодке аварийной ситуации и принятии решения командира на выпуск АНПА ПЛ, в бортовую аппаратуру аппарата дополнительно поступают данные о характере и задается глубина хода АНПА ПЛ (изначально введена глубина хода 75 метров).
После выхода АНПА ПЛ из торпедного аппарата (контейнера, пусковой установки), он проводит контрольное взаимное гидроакустическое опознавание с ПЛ, производит контрольный запуск маяка-ответчика (установленного на ПЛ) и определяет относительный пеленг и дистанцию на маяк-ответчик. Занимает установленную глубину. Определяет толщину льда в данной точке и начинает маневрирование с задачей поиска полыньи или разводья средствами ледовой разведки, для самостоятельного всплытия с целью передачи донесения об аварии.
Обнаружение полыней, разводий, ровного тонкого льда или участка, пригодного для всплытия АНПА ПЛ осуществляет многолучевым эхоледомером, позволяющим определить абсолютную толщину льда. При этом толщина льда заносится в память АНПА ПЛ с координатами. При обнаружении полыньи (разводья) АНПА ПЛ программно запоминает точку всплытия (пеленг и дистанцию до маяка-ответчика), производит маневрирование и в случае отсутствия в районе всплытия, в радиусе 150-200 метров, торосов или других, влияющих на безопасность всплытия факторов, занимает вертикальное положение, всплывает в полынью, передает донесение об аварии ПЛ и включает аварийный приводной маяк.
В случае если АНПА ПЛ не находит места для всплытия на «чистой воде» в течение 1 часа после выхода из ПЛ, дополнительный допоиск и маневр не осуществляется. Анализируется накопленный в памяти массив замеров толщины льда. Выбирается район площадью 5×5 замеров, в котором толщина льда наименьшая и изменяется не более, чем на 0,5 метра. АНПА ПЛ следует в центр данного района.
АНПА ПЛ дифферентуется, занимая строго вертикальное положение, выдвигает из носовой части четыре опоры длинной до 0,5 метра, способные закрепить АНПА ПЛ неподвижно и вертикально подо льдом. Длина опор координируется следящей системой, сопряженной с гироскопическим прибором для удержания строго вертикального положения аппарата. После занятия АНПА ПЛ вертикального фиксированного положения подо льдом, из его носовой части выдвигается шнековый бур, который завинчивается в лед на расстояние не менее 0,7 метра. При этом производится надежная фиксация АНПА ПЛ на нижней поверхности льда.
После этого из шнекового бура выдвигается антенна-бур, которая просверливает лед на расстояние не менее 1,5 метров (среднее значение «насыщенного» слоя льда при среднем значении толщины льда в период его наибольшего значения - 3,6 метра). Двигатель АНПА ПЛ увеличивает обороты, прилагая усилия для более прочного удержания аппарата подо льдом. АНПА ПЛ передает сообщение об аварии, включает аварийный маяк-привод. В пространство вокруг антенны-бура подается сжатый воздух.
Эффективность предлагаемого изобретения заключается в его простоте, отсутствии необходимости существенных материальных затрат на доработку имеющихся АНПА, а также гарантированной передачи информации из-подо льда. Использование заявляемого АНПА ПЛ значительно повысит вероятность оказания помощи аварийной ПЛ и спасения ее экипажа в арктических районах, а также безопасность плавания подводных лодок подо льдом.
Литература
1. Войтов Д.В. Автономные необитаемые подводные аппараты / Д.В. Войтов. - М.: Моркнига, 2015.
2. Каталог подводных военных роботизированных аппаратов: - М-URL: http://robotrends.ru/robopedva/podvodnie-voennie-apparaty(дата обращения 12.07.2021). - Текст электронный.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ ОБ АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКЕ ИЗ-ПОДО ЛЬДА | 2022 |
|
RU2783690C1 |
| СПОСОБ ПРИМЕНЕНИЯ НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА ПОДО ЛЬДОМ | 2020 |
|
RU2757006C1 |
| ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2650298C1 |
| САМОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПОДЪЕМА ИЗ-ПОДО ЛЬДА | 2019 |
|
RU2729852C1 |
| СПОСОБ И УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2655592C1 |
| Самоходный телеуправляемый спасательный колокол | 2017 |
|
RU2679381C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| ОБЪЕМНО-ДЕТОНИРУЮЩИЙ ЗАРЯД ДЛЯ СОЗДАНИЯ ПОЛЫНЬИ | 2022 |
|
RU2791188C1 |
| УСТРОЙСТВО ТОРПЕДЫ, ПОЗВОЛЯЮЩЕЕ ПОДВОДНОЙ ЛОДКЕ ОПРЕДЕЛЯТЬ ПУТЬ СЛЕДОВАНИЯ К СОЗДАННОЙ ПОЛЫНЬЕ В ЛЮБЫХ УСЛОВИЯХ | 2022 |
|
RU2797762C1 |
| УСТРОЙСТВО ТОРПЕДЫ, ПОЗВОЛЯЮЩЕЕ ПОДВОДНОЙ ЛОДКЕ СОЗДАВАТЬ ПОЛЫНЬЮ В ЛЕДОВОМ ПОКРОВЕ И ОПРЕДЕЛЯТЬ ЕЁ МЕСТО ДЛЯ ВСПЛЫТИЯ ИЗ-ПОДО ЛЬДА | 2021 |
|
RU2776512C1 |

Изобретение относится к области средств освоения мирового океана и проведения подводно-технических работ, в частности к автономным необитаемым подводным аппаратам (АНПА), используемым для передачи информации о состоянии подводной лодки в случае ее аварии. В состав АНПА включены работающие по командам модули аппаратуры, приборов и программно-аппаратного комплекса поиска «чистой воды» и анализа массива льда, быстросъемный модуль гидрофона и аппаратуры звукоподводной связи, соединенный с корпусом АНПА разъемами поворотного типа, телескопическая выдвижная полая антенна-бур, выполненная по аналогии шлямбурных буров со «стружкосбрасывателем» и регулируемой скоростью вращения режущей части, выдвижные опоры стабилизации АНПА в вертикальном положении и позиционирования на месте при работе антенны-бура, дифферентовочная система, устройство противозакручивания. Повышается вероятность оказания помощи аварийной подводной лодке и спасения экипажа в арктических районах, а также безопасность плавания подводных лодок подо льдом. 1 ил.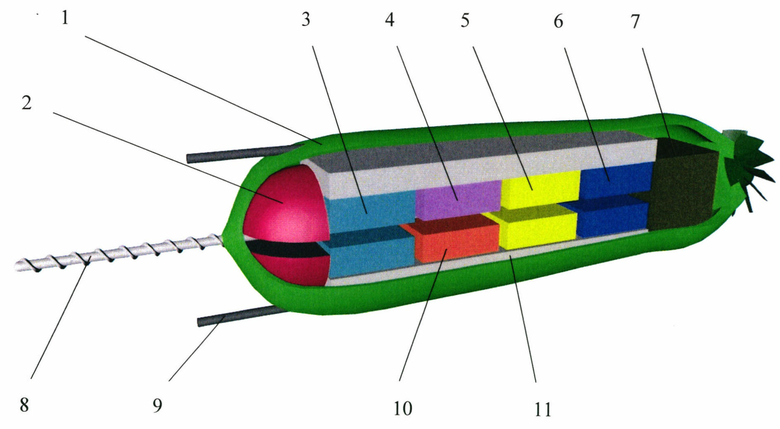
Автономный необитаемый подводный аппарат, включающий корпус в классической гидродинамической форме (торпеда), движительно-рулевой комплекс, модуль энергообеспечения, модуль управления, навигации и связи, модуль полезной нагрузки, аппаратуры и приборов, отличающийся тем, что в него дополнительно включены работающие по командам модули аппаратуры, приборов и программно-аппаратного комплекса поиска «чистой воды» и анализа массива льда, быстросъемный модуль гидрофона и аппаратуры звукоподводной связи, соединенный с корпусом автономного необитаемого подводного аппарата разъемами поворотного типа, телескопическая выдвижная полая антенна-бур, выполненная по аналогии шлямбурных буров со «стружкосбрасывателем» и регулируемой скоростью вращения режущей части, выдвижные опоры стабилизации автономного необитаемого подводного аппарата в вертикальном положении и позиционирования на месте при работе антенны-бура, дифферентовочная система, устройство противозакручивания.
| Станок для стрижки щеток | 1929 |
|
SU21898A1 |
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ | 1997 |
|
RU2119703C1 |
| Устройство для всплытия подводной лодки в ледовых условиях | 2015 |
|
RU2609854C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ОЧИСТКИ МОРСКИХ РАЙОНОВ ОТ ПЛАВАЮЩИХ ПОДВОДНЫХ ОБЪЕКТОВ | 2020 |
|
RU2753658C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| CN 111361718 A, 03.07.2020. | |||

