Изобретение относится к области морской техники и предназначено для навигационного оборудования морских районов с применением подводных аппаратов.
Известно, что навигационное оборудование морских районов обеспечивает в них безопасность кораблевождения (судовождения) и служит для определения координат кораблей и судов в море, а также для их правильной ориентировки при плавании в прибрежных и мелководных районах. Оно представляет собой систему специальных береговых и плавучих сооружений, конструкций и устройств, включающих береговые и плавучие маяки, светящиеся и несветящиеся знаки, навигационные огни, плавучие предостерегающие знаки (буи и вехи), радио-, радиолокационные и гидроакустические маяки, наземные станции радионавигационных систем и другие средства [1].
Большая часть средств навигационного оборудования устанавливается на берегу или на поверхности воды и служит для обеспечения надводных плавсредств. Обеспечение же подводных плавсредств (подводных лодок и подводных аппаратов) навигационными данными является наиболее сложной задачей. Для них нашли широкое применение гидроакустические маяки (ГАМ) и гидроакустические буи-маяки (ГАБМ).
Донный ГАМ, являясь аналогом изобретения, способен обеспечивать навигационными данными подводные плавсредства практически во всех районах Мирового океана. Дальность его действия достигает 20-25 км, а глубина постановки 6000 м [2, с. 292]. В его состав входят следующие элементы [2, с. 302-304]:
- акустическая антенна с цилиндрическим или стержневым пьезокерамическим преобразователем и поплавком для ее подъема над грунтом;
- источник питания, электронная аппаратура с приемным усилителем и дешифратором дежурного канала, размещаемые в прочном корпусе маяка, служащим в качестве якоря;
- бухта с кабель-тросом, соединяющим прочный корпус с антенной, и находящаяся в съемном кожухе;
- тормозное (амортизирующее) устройство, предохраняющее маяк от повреждений при ударе о скалистый грунт, расположенное в нижней части прочного корпуса.
После сброса донного ГАМ в воду и достижения им установленной глубины производится отделение от прочного корпуса поплавка с антенной и перевод ГАМ в дежурный режим работы.
Донный ГАМ является одноразовым навигационным устройством в районе его постановки, что является его существенным недостатком.
Существует всплывающий донный ГАМ, который может быть использован повторно. Он имеет всплывающую часть с антенной и контейнером с электронной аппаратурой, якорь и узел крепления к нему всплывающей части с резаком и пиропатроном. По команде или по истечении заданного времени нахождения на грунте срабатывает пиропатрон, резак обрезает кабель электронной аппаратуры, связывающий ее с источником питания, расположенным в якоре, после чего антенна и контейнер с электронной аппаратурой маяка всплывают на поверхность, где их поднимают из воды для дальнейшего использования. Длительность работы маяка ограничена временем действия его источника питания и составляет 10-30 суток [2, с. 305-306]. У данного ГАМ технически сложная и наиболее ценная его часть может использоваться неоднократно, однако для ее повторного применения требуется укомплектование ГАМ новым якорем и источником питания, что увеличивает время его повторного использования и неизбежно раскрывает для сторонних наблюдателей характер производимых в районе работ.
В качестве аналога изобретения известна подводная система навигации и связи «Позиционер», включающая пункт управления и связанные с ним автономный необитаемый подводный аппарат (АНПА) и гидроакустический буй-маяк (ГАБМ) с аппаратурой спутниковой связи и навигации. Навигационная информация передается на надводные и подводные плавсредства от маневрирующего в заданном морском районе АНПА, который периодически обновляет ее у ГАБМ по звукоподводной связи. ГАБМ имеет располагаемые в пластмассовом корпусе аппаратную часть, систему электропитания, радио- и гидроакустическую аппаратуру, включающую радиостанцию УКВ, приемник ГЛОНАСС, комплект системы спутниковой связи и аппаратуру подводной связи. ГАБМ выполняются в трех вариантах: донном, плавающем и вмораживаемым в лед. Донный ГАБМ имеет якорь, дрейфующий - защитный корпус с аппаратной частью, дополнительными элементами питания и поплавками, а вмораживаемый в лед ГАБМ оснащается высокопрочным термоконтейнером [3].
ГАБМ и АНПА взаимодействуют в следующих режимах:
- «запросном», когда по запросу АНПА ГАБМ передает ему по гидроакустическому каналу связи данные, полученные от спутника;
- «диалоговом», при котором ГАБМ связывает пункт управления с АНПА в режиме реального времени по УКВ радиоканалу, обеспечивая контроль местонахождения АНПА и управление им;
- «автономном», когда АНПА уточняет у ГАБМ свои координаты по гидроакустическому каналу связи и действует самостоятельно;
- «аварийном», служащим для трансляции на пункт управления сигнала бедствия от АНПА.
Главным недостатком ГАБМ при его использования в составе существующих систем навигации и связи является отсутствие у него мобильности и оперативности навигационного оборудования морского района.
За прототип изобретения принимается мобильный гидроакустический буй-маяк [4], имеющий источник тока, аппаратуру управления, поплавок с антенной и приемником спутниковой системы навигации типа ГЛОНАСС, а также аппаратурой приема и передачи гидроакустических сигналов. Мобильность ГАБМ обеспечивает АНПА, в отдельном модуле которого ГАБМ и размещается.
Кроме того, мобильный ГАБМ имеет:
- устройство отделения поплавка и возвращения его обратно с приводом и катушкой с кабелем, связывающим аппаратуру управления с приемником спутниковой системы навигации, расположенной в поплавке;
- устройство распознавания сигналов запроса «свой-чужой» для разрешения передачи запрашиваемой информации;
- шифратор, преобразующий передаваемую информацию и предотвращающий ее восстановление в случае перехвата чужими объектами;
- дешифратор, осуществляющий обратное преобразование получаемой информации;
- вычислительное устройство;
- датчики гидростатического и гидродинамического давления необходимые для расчета скорости дрейфа мобильного ГАБМ при покладке на грунт, а также расчета параметров горизонтального сноса всплывающего поплавка относительно точки постановки.
Мобильный ГАБМ работает следующим образом.
С прибытием в заданную точку мобильный ГАБМ всплывает на установленную глубину, ложится в дрейф и отделяет поплавок с антенной и приемником спутниковой системы навигации. Поплавок всплывает на поверхность, где принимает от спутника свои координаты и по кабелю передает их в аппаратуру управления. После этого мобильный ГАБМ начинает погружение и ложится на грунт.
Всплывающий поплавок с аппаратурой приема и передачи сигналов гидроакустического буя-маяка связан кабелем с аппаратурой управления, размещаемой в отсеке АНПА. Длина кабеля регулируется устройством отделения поплавка и его возвращения. Истинные географические координаты ГАБМ рассчитываются в вычислительном устройстве с учетом показаний датчиков гидростатического и гидродинамического давления, глубины погружения АНПА и длины кабеля.
ГАБМ передает подводному объекту необходимую навигационную информацию после получения от него по гидроакустическому каналу запроса, подтверждающего, что он «свой».
Перебазирование мобильного ГАБМ в другой район производится по команде с пункта управления, транслируемой по гидроакустическому каналу связи с прибывшего в район действия ГАБМ плавсредства. При этом мобильный ГАБМ выбирает кабель с поплавком на борт, всплывает, запускает движитель и переходит в соответствии с заданием в новый район, где уточняет свои координаты и погружается на дно [4]. Однако из-за возможно высокой вязкости грунта всплытие ГАБМ может быть затруднено вследствие его заиливания и «присасывания» к грунту, что является существенным недостатком мобильного ГАБМ.
Другим недостатком мобильного ГАБМ является отсутствие регулярно действующего канала связи с пунктом управления, что вызывает необходимость для выдачи нового задания использовать заходящие в район плавсредства. Кроме того, ГАБМ не обеспечивает контроль технического состояния своего бортового оборудования и не осуществляет мониторинг проходящих через район объектов, так как не имеет соответствующей аппаратуры и связи с пунктом управления.
Для оценки свойств донного грунта при покладке мобильного гидроакустического буя-маяка на дно может быть использован акустический профилограф, имеющий параметрическую акустическую антенну и аппаратуру для обработки сигналов [5].
Целью изобретения является разработка мобильного гидроакустического буя-маяка, обеспечивающего необходимой навигационной информацией действующие в районе свои подводные объекты, имеющего канал регулярной связи с пунктом управления и аппаратуру, контролирующую техническое состояние бортового оборудования, способного выбирать подходящую площадку с твердым грунтом для укладки на грунт и производить мониторинг водной среды.
Для достижения цели изобретения предлагается контролируемый мобильный гидроакустический буй-маяк, представляющий собой автономный необитаемый подводный аппарат, оснащенный бортовой инерциальной навигационной системой управления, энергосиловой установкой с источником энергии и двигателем, движителем, приводами рулевых машинок и наружным оперением с рулями, датчиками гидростатического и гидродинамического давления, в отдельном отсеке подводного аппарата размещается гидроакустический буй-маяк, имеющий приемопередающую радиоантенну спутниковой системы навигации и аппаратуру приема и передачи гидроакустических сигналов, источник тока и аппаратуру управления с вычислительным устройством, устройство распознавания сигналов запроса «свой-чужой», дешифратор и шифратор.
Дополнительно автономный необитаемый подводный аппарат имеет один и более балластных отсеков с устройствами заполнения их водой и осушения, акустический профилограф, запоминающее устройство, не менее одного гидрофона, аппаратуру контроля работоспособности бортового оборудования, приемопередающую радиоаппаратуру с источником тока и поплавок связи с находящейся в нем приемопередающей антенной, соединенной с бортовой инерциальной навигационной системой управления кабелем, намотанным на катушку, имеющую привод и управляющее устройство.
Контролируемый мобильный гидроакустический буй-маяк (КМ ГАБМ) работает следующим образом.
После ввода маршрутного задания в бортовую инерциальную навигационную систему управления (БИНСУ) КМ ГАБМ выпускается на маршрут. С прибытием в точку с заданными координатами, он всплывает на установленную глубину, поднимает на поверхность воды поплавок связи, устанавливает связь с пунктом управления, а с помощью приемопередающей радиоантенны спутниковой системы навигации получает точные текущие координаты, транслируемые по кабелю в аппаратуру управления ГАБМ.
В соответствии с заданием или по команде с пункта управления КМ ГАБМ принимает воду в балластный отсек, погружается и обследует дно с помощью акустического профилографа с целью поиска подходящей площадки с твердым грунтом. После отыскания подходящего места ГАБМ ложится на грунт. По показаниям датчиков гидростатического и гидродинамического давления, входящим в состав БИНСУ, длины вытравленного кабеля поплавка связи и глубины места АНПА, в вычислительном устройстве рассчитываются точные географические координаты ГАБМ. Высота отстояния буя от грунта складывается из известного диаметра корпуса АНПА и высоты поднимаемой трубы с закрепленным на ней буем. По запросному сигналу подводного объекта КМ ГАБМ определяет его принадлежность и, если объект является своим, то передает ему через шифратор запрашиваемую навигационную информацию.
Дополнительно КМ ГАБМ осуществляет в районе постановки мониторинг водного пространства, используя гидрофоны и запоминающее устройство для сохранения шумов и сигналов проходящих мимо объектов и передаваемой им информации.
Связь КМ ГАБМ с пунктом управления осуществляется по радиоканалу с использованием поплавка связи, который с помощью управляющего устройства, привода и катушки с кабелем поднимают на поверхность воды и устанавливают радиосвязь с пунктом управления. На большом удалении от пункта управления связь поддерживают через ретрансляторы, например, космические или летательные аппараты.
По окончании работы или по команде с пункта управления КМ ГАБМ выбирает на борт поплавок связи, опускает трубу с буем, осушает балластный отсек, отделяется от грунта, запускает энергосиловую установку и переходит в заданный район для смены позиции или возвращения в базу.
Наличие канала связи с пунктом управления позволяет КМ ГАБМ оперативно передавать данные мониторинга водного пространства о проходящих мимо объектах и информацию о своем техническом состоянии.
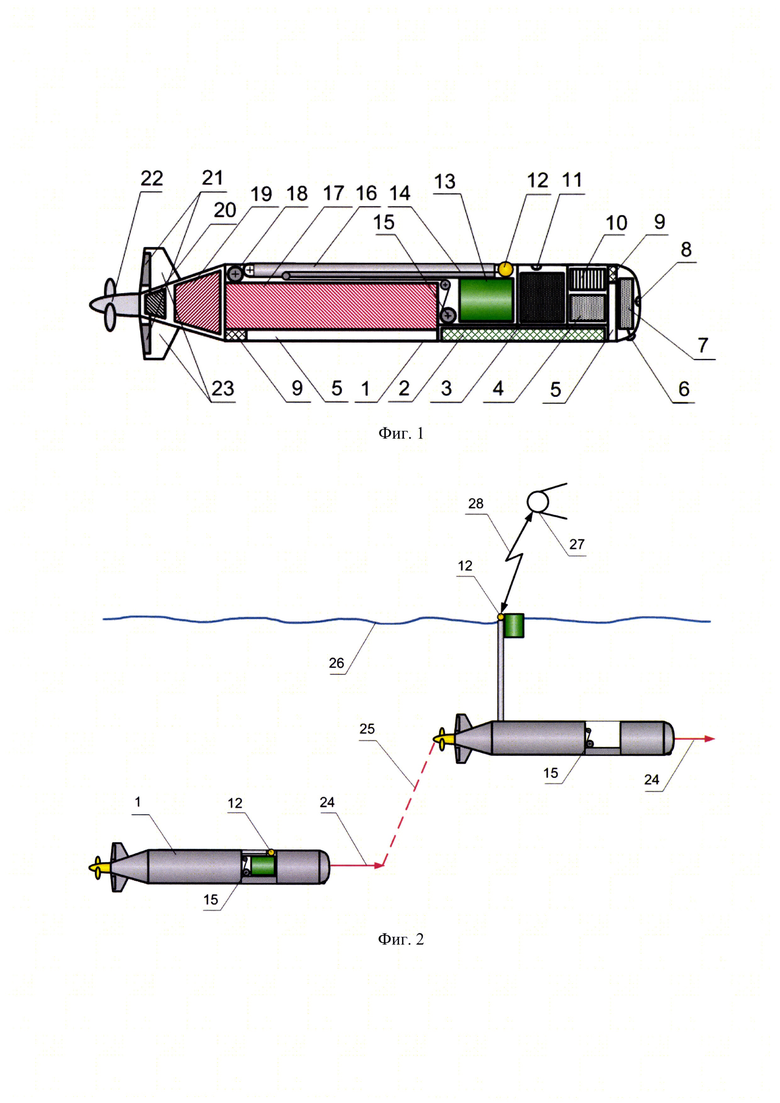
Устройство контролируемого мобильного гидроакустического буя-маяка показано на фиг. 1. Цифрами обозначены: 1 - корпус КМ ГАБМ, 2 - источник тока, 3 - бортовая инерциальная навигационная система управления, 4 - аппаратура управления с вычислительным устройством, устройством распознавания сигналов запроса «свой-чужой», дешифратором и шифратором, 5 - балластный отсек, 6 - антенна акустического профилографа, 7 - аппаратура акустического профилографа, 8 - датчик гидродинамического давления, 9 - устройство заполнения балластного отсека забортной водой и его осушения, 10 - аппаратура контроля работоспособности бортового оборудования КМ ГАБМ, 11 - датчик гидростатического давления, 12 - поплавок связи с находящейся в нем приемопередающей радиоантенной и радиоантенной спутниковой системы навигации, 13 - буй с гидрофонами и аппаратурой приема и передачи гидроакустических сигналов, 14 - кабель, 15 - катушка с приводом и устройством управления, 16 - труба (кабель-канал), 17 - энергосиловая установка, 18 - механизм подъема/опускания трубы, 19 - двигатель, 20 - рулевые машинки и их приводы, 21 - рули, 22 - движитель, 23 - наружное оперение.
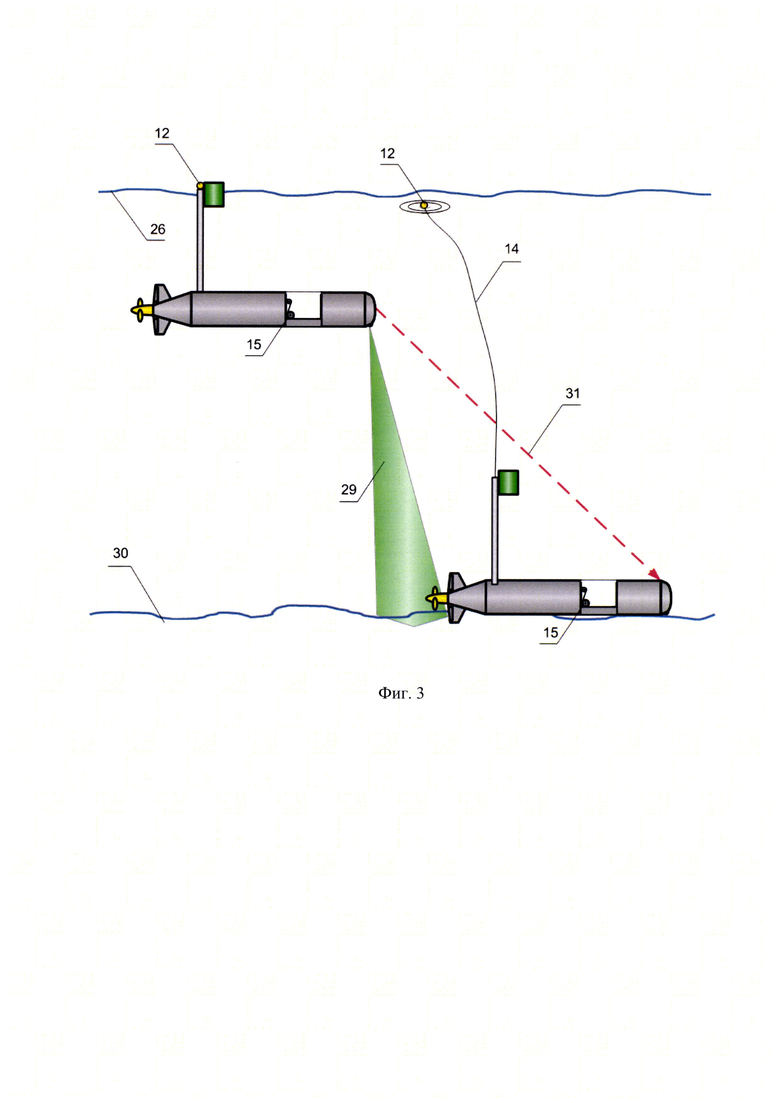
Установка КМ ГАБМ на заданную позицию показана на фиг. 2 и 3. Цифрами обозначены: 1 - корпус КМ ГАБМ, 12 - поплавок связи с приемопередающей радиоантенной и радиоантенной спутниковой системы навигации, 14 - кабель, 15 - катушка с приводом и устройством управления, 24 - вектор горизонтального движения КМ ГАБМ, 25 - всплытие КМ ГАБМ для уточнения своих координат, 26 -поверхность моря, 27 - космический аппарат, 28 - получение координат от космического аппарата и связь с пунктом управления, 29 - обследование поверхности дна акустическим профилографом, 30 - морское дно, 31 - погружение КМ ГАБМ.
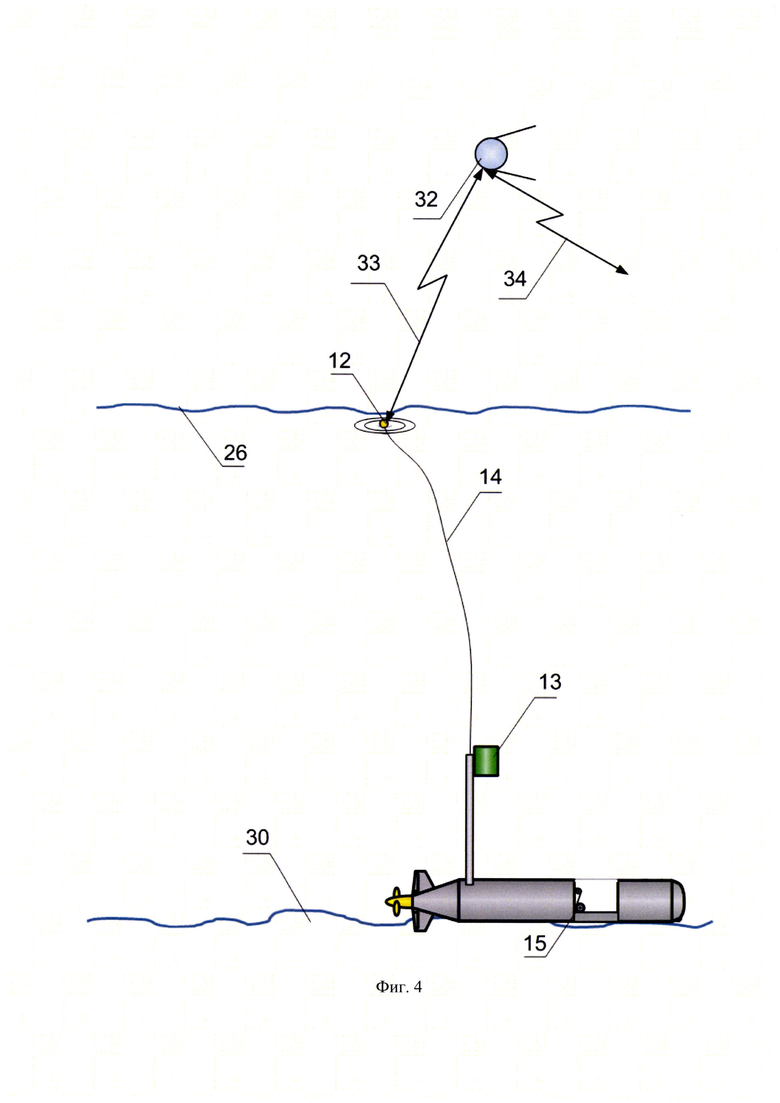
На фиг. 4 изображен сеанс связи КМ ГАБМ с пунктом управления. Цифрами показаны: 12 - поплавок связи с находящейся в нем приемопередающей радиоантенной и радиоантенной спутниковой системы навигации, 13 - буй с гидрофонами и аппаратурой приема и передачи гидроакустических сигналов, 14 - кабель, 26 - поверхность моря, 30 - морское дно, 32 - космический аппарат, 33 - линия радиосвязи между поплавком связи КМ ГАБМ и космическим аппаратом, 34 - линия радиосвязи между космическим аппаратом и пунктом управления.
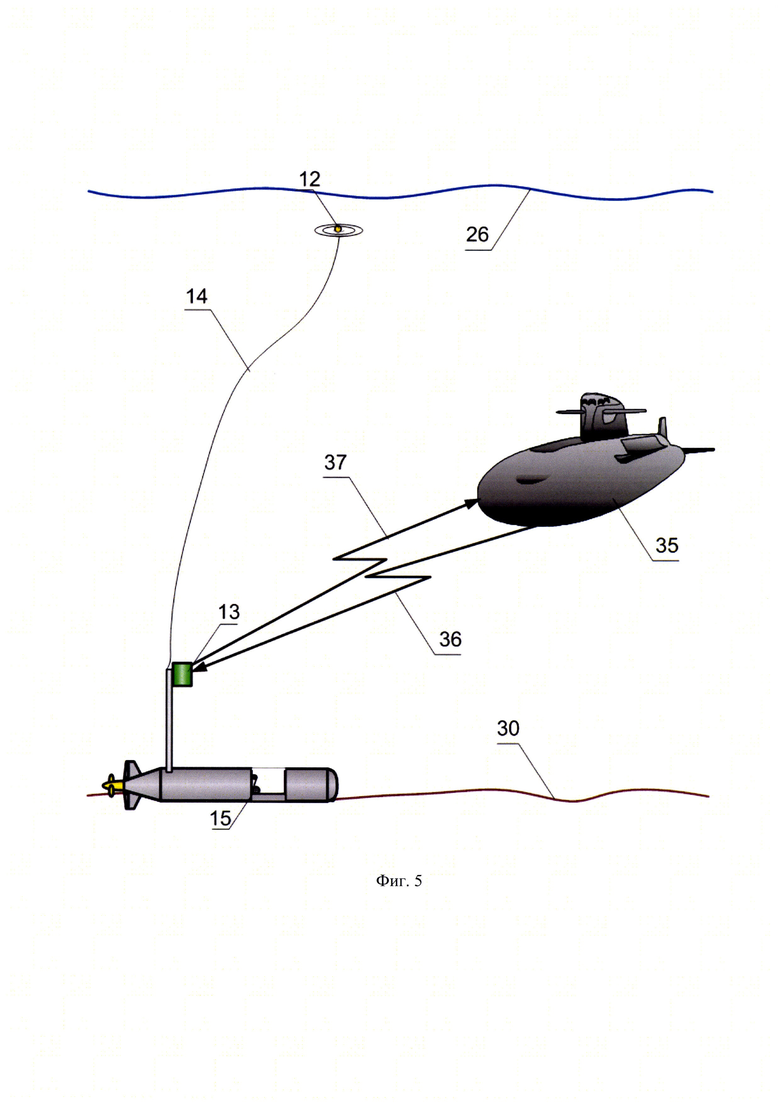
На фиг. 5 приводится взаимодействие КМ ГАБМ с подводным плавсредством (35), включающее получение от него запроса (36) и передачу навигационной информации (37).
Техническим результатом изобретения является контролируемый мобильный гидроакустический буй-маяк, предназначенный для обеспечения в заданном морском районе своих подводных объектов необходимой навигационной информацией. Кроме того он осуществляет мониторинг водной среды в районе постановки и, благодаря наличию канала радиосвязи с пунктом управления, оперативно передает ему информацию о проходящих мимо объектах, а также данные о своем техническом состоянии. Он может своевременно покидать район действий для перехода в другое место или возвращения в базу.
Источники информации
1. Навигационное оборудование. Военно-морской словарь / Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. - 511 с. С. 265.
2. И.С. Калинский. Навигационное оборудование морских театров. Л.: ВВМКУ им. М.В. Фрунзе, 1980. - 428 с.
3. Д. Литовкин, А. Рамм. В России создан подводный ГЛОНАСС. М.: Известия IZ, 08.12.2016, https//iz.ru/news/650211.
4. Мобильный гидроакустический буй-маяк и способ навигационного оборудования морского района / А.В. Иванов, А.В. Новиков. Патент на изобретение RU 2709058. М.: ФИПС, 2019. Бюл. № 35.
5. Акустические профилографы. http://incseatech.ocean.ru/index.php/gidrograficheskie-tekhnicheskie-sredstva/akusticheskie-profilografy.html
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И КОНТРОЛЯ В НЕМ АКУСТИЧЕСКИХ ОБЪЕКТОВ | 2023 |
|
RU2806775C1 |
| МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2709058C2 |
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СИСТЕМА ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2659314C2 |
| АКУСТИЧЕСКИЙ РЕФЛЕКТОР МОБИЛЬНЫЙ | 2020 |
|
RU2755751C1 |
| Способ позиционирования самоходного необитаемого подводного аппарата, выполняющего мониторинг подводной акватории | 2022 |
|
RU2794555C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| СПОСОБ ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2668494C2 |
| Устройство радиомониторинга морских и воздушных объектов с применением привязного беспилотного летательного аппарата мультикоптерной схемы с электропитанием по тросу-кабелю | 2023 |
|
RU2813105C1 |
Изобретение относится к области морской техники и предназначено для навигационного оборудования морских районов с применением подводных аппаратов. Контролируемый мобильный гидроакустический буй-маяк представляет собой автономный необитаемый подводный аппарат, который оснащен бортовой инерциальной навигационной системой управления, энергосиловой установкой с источником энергии и двигателем, движителем, приводами рулевых машинок и наружным оперением с рулями, датчиками гидростатического и гидродинамического давления. В отдельном отсеке подводного аппарата размещается гидроакустический буй-маяк, имеющий приемопередающую радиоантенну спутниковой системы навигации и аппаратуру приема и передачи гидроакустических сигналов, источник тока и аппаратуру управления с вычислительным устройством, устройство распознавания сигналов запроса «свой-чужой», дешифратор и шифратор. Автономный необитаемый подводный аппарат имеет один и более балластных отсеков с устройствами заполнения их водой и осушения, акустический профилограф, запоминающее устройство, не менее одного гидрофона, аппаратуру контроля работоспособности бортового оборудования, приемопередающую радиоаппаратуру с источником тока и поплавок связи с находящейся в нем приемопередающей антенной, которая соединена с бортовой инерциальной навигационной системой управления кабелем, намотанным на катушку, имеющую привод и управляющее устройство. Достигается обеспечение в заданном морском районе своих подводных объектов необходимой навигационной информацией. 5 ил.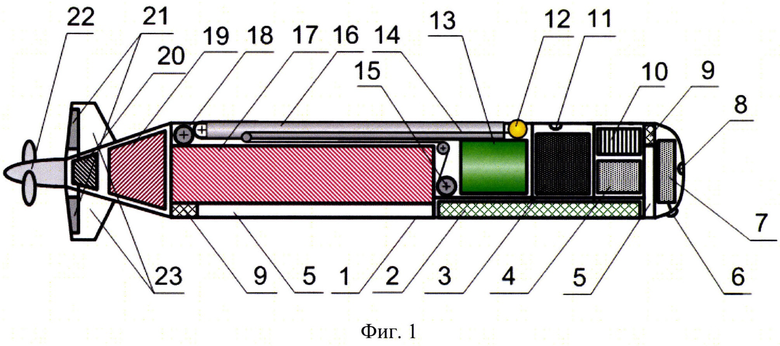
Контролируемый мобильный гидроакустический буй-маяк, представляющий собой автономный необитаемый подводный аппарат, оснащенный бортовой инерциальной навигационной системой управления, энергосиловой установкой с источником энергии и двигателем, движителем, приводами рулевых машинок и наружным оперением с рулями, датчиками гидростатического и гидродинамического давления, в отдельном отсеке подводного аппарата размещается гидроакустический буй-маяк, имеющий приемопередающую радиоантенну спутниковой системы навигации и аппаратуру приема и передачи гидроакустических сигналов, источник тока и аппаратуру управления с вычислительным устройством, устройство распознавания сигналов запроса «свой-чужой», дешифратор и шифратор, отличающийся тем, что автономный необитаемый подводный аппарат имеет один и более балластных отсеков с устройствами заполнения их водой и осушения, акустический профилограф, запоминающее устройство, не менее одного гидрофона, аппаратуру контроля работоспособности бортового оборудования, приемопередающую радиоаппаратуру с источником тока и поплавок связи с находящейся в нем приемопередающей антенной, соединенной с бортовой инерциальной навигационной системой управления кабелем, намотанным на катушку, имеющую привод и управляющее устройство.
| МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2709058C2 |
| US 4097837 A1, 27.06.1978 | |||
| US 3860900 A1, 14.01.1975. | |||

