Уровень техники
Настоящее изобретение относится к управлению объектами добычи с помощью моделирования. В частности, настоящее изобретение относится к управлению объектами добычи добывающим установками) с помощью моделирования в реальном времени.
Уровень техники
В общем, объект добычи включает в себя множество систем для выполнения добычи полезных ископаемых. Системы включают в себя синхронные и асинхронные электромеханические машины. Объект добычи может быть типично расположен в удаленном районе. Дополнительно, добыча полезных ископаемых может быть опасной. Соответственно, ручное наблюдение за объектом добычи может быть опасным и времязатратным.
Соответственно, системы на объекте добычи могут быть смоделированы. Операция моделирования систем и синхронных и асинхронных машин предоставляет возможность удаленного наблюдения за состоянием объекта добычи.
Одним подходом может быть использование моделирований в автономном режиме, чтобы определять состояние объекта добычи. Для таких способов моделирования может потребоваться значительное время моделирования и, следовательно, нет возможности моделировать работу объекта добычи в реальном времени. Соответственно, решения в реальном времени не могут быть приняты на основе моделирований в автономном режиме (off-line -офлайн).
Сущность изобретения
Наблюдение за состоянием в реальном времени может быть возможным посредством улучшенного моделирования объекта добычи. Согласно первому аспекту настоящего изобретения раскрывается способ управления объектом добычи. Объект добычи включает в себя множество систем, которые используются для выполнения добычи полезных ископаемых. Способ включает в себя формирование, в блоке моделирования, моделей системы для одной или более систем из множества систем объекта добычи; при этом модели системы формируются на основе одного из входного сигнала, данных датчиков и выходного сигнала от множества систем на объекте добычи; формирование модели объекта для объекта добычи на основе зависимостей между моделями системы, при этом зависимости содержат соединения для обратной связи между моделями системы; и управление объектом добычи посредством моделирования работы объекта добычи с помощью модели объекта, при этом управление объектом (150A-N) добычи содержит, по меньшей мере, одно из: прогнозирования оптимизированных входных сигналов для объекта (150 A-N) добычи на основе моделирования объекта добычи; и прогнозирования работы новой системы, которая должна быть развернута на объекте (150 A-N) добычи, при этом новая система включает в себя вновь введенную в эксплуатацию систему или систему, из множества систем, с одним из обновления аппаратных средств и обновления программного обеспечения.
Объект добычи может относиться к любому горнодобывающему предприятию, которое может быть использовано для добычи минералов, морской добычи или добычи металла. Примеры объектов добычи включают в себя предприятия по добыче минералов, таких как железная руда, медная руда и т.д. На объекте добычи добытые горные породы могут быть помещены в большие дробилки для руды с диаметрами приблизительно 13-15 метров. В некоторых случаях 400000 тонн руды добывается ежегодно. Объект добычи включает в себя двигатели и приводы, которые приводят в действие операцию измельчения. Примерный двигатель включает в себя кольцевой двигатель, а примерный привод дробилки включает в себя привод дробилки без зубчатой передачи с номинальными характеристиками до 24 МВт. В другом примере двигатель является приводом с единственным/двойным зубчатым колесом для дробилок, шахтных подъемных машин и конвейеров. Соответственно, множество систем на объекте добычи включают в себя двигатель и привод. Другие системы включают в себя блок подачи питания, блок трансформатора, преобразователь и блок нагрузки. Блок нагрузки может дополнительно включать в себя блок прерывания питания и нагрузку дробления.
В варианте осуществления моделирование объекта добычи выполняется с помощью моделирования схемы систем на объекте добычи. Например, системы включают в себя привод, преобразователь или конвейерную линию, и моделирование схемы систем используется для моделирования режима работы объекта добычи на основе зависимостей между моделированиями схемы каждой из систем.
Для управления приводом используются управляемые преобразователи, такие как циклоконвертеры. Преимуществом циклоконвертера является его высокая доступность, высокая перегрузочная способность и высокая эффективность. Циклоконвертеры являются сложными и, поэтому их нелегко смоделировать. Настоящее изобретение преимущественно моделирует работу циклоконвертера, чтобы определять параметры управления в реальном времени. Дополнительно, настоящее изобретение преимущественно моделирует блок подачи питания, трансформатор, двигатель, привод и блок нагрузки и, тем самым, формирует цифровую копию объекта добычи.
Используемый в данном документе термин "модели системы" относится к виртуальным копиям систем на объекте добычи. Модели системы могут быть реализованы на основе физики, обуславливающей систему (физическая модель). Модели системы могут содержать чертежи системы автоматизированного проектирования (CAE), одномерные или трехмерные модели для вычислительной гидродинамики (CFD), шума, вибрации и резкости (NVH), конструкций и т.п. В некоторых вариантах осуществления модели системы могут быть реализованы с помощью одной или более моделей машинного обучения в сочетании с физической моделью (на основе физики).
Например, в варианте осуществления, входной сигнал блока трансформатора и выходной сигнал блока трансформатора анализируются на основе физики, обуславливающей блок трансформатора, чтобы формировать модель трансформатора. В другом варианте осуществления данные датчика, ассоциированные с блоком трансформатора, используются в качестве обратной связи, чтобы обновлять физическую модель трансформатора.
Способ может включать в себя формирование модели снабжения для блока подачи, модели трансформатора, модели конечного автомата для выпрямителей в циклоконвертере, модели двигателя для двигателя и модели нагрузки для блока нагрузки. Модель нагрузки может дополнительно включать в себя модель прерывания для блока прерывания. Модели системы включают в себя модель подачи питания, модель трансформатора, модель двигателя, модель нагрузки и модель прерывания.
В варианте осуществления способ может включать в себя формирование моделей конечных автоматов для выпрямителей на основе коэффициента модуляции или угла отпирания одного или более тиристоров в выпрямителях. В предпочтительном варианте осуществления пусковые импульсы и функция напряжения и тока от блока трансформатора или блока снабжения используются для формирования моделей конечных автоматов.
Способ может включать в себя определение состояний преобразователя выпрямителей циклоконвертера, состояния преобразователя формируются на основе пусковых импульсов, введенных в тиристоры в выпрямителях. Состояния преобразователя используются для формирования модели конечного автомата для выпрямителей. Чтобы определять состояние преобразователя, значения состояний может быть необходимо прогнозировать. Соответственно, способ может включать в себя прогнозирование значений состояний для состояний преобразователя на основе пускового импульса, напряжения тиристоров и тока тиристоров. Способ может дополнительно включать в себя мультиплексирование значений состояния для определения состояний преобразователя. Дополнительно, способ может включать в себя прогнозирование перехода состояния для циклоконвертера на основе текущего состояния циклоконвертера.
В одном варианте осуществления способ может включать в себя определение эквивалентной схемы для состояний преобразователя. Например, тиристор может быть смоделирован с точки зрения напряжения, тока и сопротивления. Дополнительно, различные тиристоры могут быть "включены" или "выключены". Соответственно, эквивалентная схема для каждого состояния преобразователя может быть сформирована. Специалисту в области техники будет понятно, что тиристоры не выключаются, пока ток не равен нулю. Следовательно, формирование модели конечного автомата является сложным. Преимущество настоящего изобретения заключается в том, что состояния преобразователя прогнозируются на основе напряжения, измеренного на концах тиристоров. Дополнительно, в варианте осуществления, условия, такие как ошибочные импульсы и/или двойные коммутации, могут быть смоделированы на основе исторических данных (архивных данных, данных за прошедший период), ассоциированных с циклоконвертером.
Чтобы гарантировать, что сложности систем моделируются точно, способ может включать в себя валидацию моделей систем посредством совместного моделирования моделей систем на одной или более платформах моделирования.
Например, модель системы может быть сформирована на платформе моделирующей симуляции схемы и валидируется на настраиваемой платформе динамического моделирования на основе блоков. Чтобы гарантировать, что совместное моделирование правильно выполняется, способ может включать в себя синхронизацию совместно моделирования моделей системы на платформах моделирования.
В другом варианте осуществления валидация моделей системы может быть выполнена посредством сравнения смоделированных выходных данных и выходных сигналов от систем на объекте добычи. Разница в смоделированных выходных данных и выходных сигналах используется в качестве обратной связи, чтобы обновлять модель системы.
Модели системы зависят друг от друга. Зависимости моделируются, чтобы формировать модель объекта для объекта добычи. Соответственно, используемая в данном документе "модель объекта" относится к виртуальной копии объекта добычи. Модель объекта предоставляет возможность наблюдения состояния объекта добычи. Дополнительно, модель объекта преимущественно используется для прогнозирования и анализа аномалий на объекте добычи.
Способ может включать в себя определение зависимостей между моделями системы на основе, по меньшей мере, одного из технических чертежей, блок-схем последовательности операций процесса, карты компоновки объекта добычи и взаимосвязи между точками данных в данных датчиков. Например, процесс и схемы оснащения измерительными приборами объекта добычи могут быть использованы, чтобы определять системы, которые ассоциируются друг с другом. В другом примере анализ чувствительности может быть выполнен по данным датчиков, чтобы определять взаимосвязь между точками данных. Взаимосвязь между точками данных может быть использована для определения ассоциативной связи между системами.
В варианте осуществления зависимости определяются так, что модель конечного автомата для выпрямителей в циклоконвертере формируется на основе тока двигателя, выводимого из модели двигателя, предоставленной в качестве входных данных для модели конечного автомата. В другом варианте осуществления модель двигателя для двигателя формируется на основе выходных данных скорости из модели нагрузки, предоставленной в качестве входных данных для модели двигателя.
Формирование в реальном времени моделей системы может потребоваться для наблюдения за работой объекта добычи без какой-либо задержки. Соответственно, способ может включать в себя формирование одной из модели конечного автомата, модели двигателя и модели нагрузки с использованием программируемой пользователем вентильной матрицы (FPGA).
Модель объекта может быть использована для удаленного наблюдения за состоянием и управления аномалией. Способ может включать в себя идентификацию аномалий в работе объекта добычи на основе данных датчиков и выходных сигналов. Аномалии могут быть идентифицированы с использованием предварительно определенного порогового значения для данных датчиков и выходных сигналов. В другом варианте осуществления аномалии могут быть идентифицированы с использованием алгоритмов машинного обучения, таких как кластеризация методом k-средних, диаграммы размаха и т.д.
Способ может дополнительно включать в себя определение параметров состояния, вызывающих аномалии посредством моделирования возможных условий аномалии с помощью модели объекта. Чтобы моделировать возможные условия аномалии, способ может включать в себя прогнозирование возможных условий аномалии на основе входных данных, данных датчиков и выходных данных с помощью алгоритмов анализа коренных причин, таких как байесовские сети.
Способ может включать в себя прогнозирование оптимизированных входных сигналов для объекта добычи на основе аномалий и параметров состояния. В варианте осуществления параметры состояния и оптимизированные входные сигналы сопоставляются в логарифмической таблице.
В определенных сценариях оптимизированные входные сигналы прогнозируются на основе проб и ошибок. Соответственно, является полезным валидировать оптимизированные входные сигналы и влияние на объект добычи перед актуализацией. Способ может включать в себя валидацию оптимизированных входных сигналов посредством формирования примеров моделирования для оптимизированных входных сигналов для объекта добычи с помощью модели объекта. Например, примеры моделирования формируются, когда оптимизированные входные сигналы предоставляются в качестве входных данных для модели объекта. Режим работы модели объекта анализируется посредством определения того, попадают ли выходные значения моделей системы в пределы порогового значения. Способ может дополнительно включать в себя работу объекта добычи на основе валидированных оптимизированных входных сигналов.
В другом сценарии может быть обновление объекта добычи относительно аппаратных средств или программного обеспечения. Такое обновление называется "новой системой". Например, обновления аппаратных средств включают в себя модификацию в физических частях типа, например, замены тиристора в циклоконвертере или замены обмоток двигателя для двигателя. Обновления программных средств включают в себя модификацию параметров управления циклоконвертера, обновление в управляющем программном обеспечении и т.д.
Способ может дополнительно включать в себя прогнозирование работы новой системы, которая должна быть развернута на объекте добычи, с использованием модели объекта. Как упомянуто выше, новая система включает в себя вновь введенную в эксплуатацию систему или систему, из множества систем, с одним из обновления аппаратных средств и обновления программного обеспечения. Способ может дополнительно включать в себя оптимизацию проектных параметров новой системы на основе спрогнозированной работы. Например, новая система может относится к новому методу модуляции для пусковых импульсов тиристоров. Угол отпирания (пусковой угол) может быть оптимизирован, чтобы приводить к уменьшению реактивной мощности.
Способ может включать в себя моделирование этапов ввода в промышленную эксплуатацию на модели объекта. Моделирование этапов ввода в промышленную эксплуатацию может быть использовано для сравнения работы объекта добычи относительно существующих руководств.
Способ может дополнительно включать в себя моделирование параметров регулирования скорости по модели объекта, чтобы испытывать множество режимов регулирования скорости. Способ может также включать в себя отображение аномалий, ассоциированных с режимами регулирования скорости. Дополнительно способ включает в себя идентификацию изменений в параметрах регулирования скорости, чтобы смягчать аномалии.
Второй аспект настоящего изобретения является блоком моделирования для управления объектом добычи. Блок моделирования содержит программируемую пользователем вентильную матрицу (FPGA). Память, соединенную с возможностью связи с FPGA, при этом память содержит модуль моделирования, сохраненный в форме машиночитаемых инструкций, исполняемых посредством FPGA, при этом модуль моделирования конфигурируется, чтобы выполнять один или более этапов способа, которые описаны выше. Модуль моделирования включает в себя модели системы и модель объекта. В варианте осуществления блок моделирования может включать в себя сочетание FPGA и центрального процессора, чтобы исполнять модель объекта.
В варианте осуществления блок моделирования может быть расположен удаленно от объекта добычи и соединен с возможностью связи через сеть. Например, данные датчиков от объекта добычи принимаются блоком моделирования через сеть. Блок моделирования выполняет модель объекта с помощью данных датчиков, чтобы определять аномалии или новые проектные параметры для объекта добычи.
Третий аспект настоящего изобретения является системой для управления, по меньшей мере, одним объектом добычи. Система содержит одно или более устройств, выполненных с возможностью предоставления данных датчиков и выходных данных, ассоциированных с работой, по меньшей мере, одного объекта добычи, и один или более вышеупомянутых блоков моделирования, соединенных с возможностью связи с одним или более устройствами. Блоки моделирования конфигурируются, чтобы управлять, по меньшей мере, одним объектом добычи.
В варианте осуществления система может включать в себя облачную вычислительную платформу, соединенную с возможностью связи с одним или более устройствами. Модули моделирования блоков моделирования могут быть сохранены на облачной вычислительной платформе и доступны через сетевой интерфейс. Сетевой интерфейс может быть сочетанием проводного и беспроводного соединения для передачи данных, таким как, например, WLAN, 2G, 3G, 4G или 5G-сеть. Следовательно, модели системы и модель объекта могут быть доступны через сетевой интерфейс.
Четвертый аспект настоящего изобретения является компьютерно-читаемым носителем, имеющим машиночитаемые инструкции, сохраненные на нем, которые, когда исполняются процессором, инструктируют процессору выполнять вышеупомянутые этапы способа.
Настоящее изобретение не ограничивается единственной платформой компьютерной системы, процессором, операционной системой или сетью. Один или более аспектов настоящего изобретения могут быть распределены между одной или более компьютерными системами, например, серверами, сконфигурированными, чтобы предоставлять одну или более служб одному или более клиентским компьютерам, или выполнять законченную задачу в распределенной системе. Например, один или более аспектов настоящего изобретения могут быть выполнены в клиент-серверной системе, которая содержит компоненты, распределенные между одной или более серверными системами, которые выполняют множество функций согласно различным вариантам осуществления. Эти компоненты содержат, например, исполняемый, промежуточный или интерпретируемый код, который передается по сети с помощью протокола связи.
Вышеупомянутые и другие признаки изобретения будут н рассмотрены со ссылкой на сопровождающие чертежи настоящего изобретения. Иллюстрированные варианты осуществления предназначаются, чтобы иллюстрировать, но не ограничивать изобретение.
Настоящее изобретение дополнительно описывается далее в данном документе со ссылкой на иллюстрированные варианты осуществления, показанные на сопровождающих чертежах, на которых:
Фиг. 1 иллюстрирует блок-схему системы для управления объектами добычи, согласно варианту осуществления настоящего изобретения;
Фиг. 2-4 иллюстрируют формирование модели конечного автомата для выпрямителя в циклоконвертере, согласно варианту осуществления настоящего изобретения.
Фиг. 5 иллюстрирует блок-схему модели объекта для объекта добычи на фиг. 1, согласно варианту осуществления настоящего изобретения;
Фиг. 6 иллюстрирует блок-схему блока моделирования для управления объектом добычи, согласно варианту осуществления настоящего изобретения;
Фиг. 7 иллюстрирует способ управления объектом добычи, согласно варианту осуществления настоящего изобретения; и
Фиг. 8, 9 и 10 являются графиками, которые иллюстрируют оптимизацию входных сигналов с использованием модели объекта, согласно варианту осуществления настоящего изобретения.
Далее в данном документе варианты осуществления для выполнения настоящего изобретения описываются подробно. Различные варианты осуществления описываются со ссылкой на чертежи, при этом аналогичные ссылочные позиции используются для ссылки на аналогичные элементы на всех чертежах. В последующем описании, в целях пояснения, многочисленные конкретные детали излагаются для того, чтобы обеспечивать полное понимание одного или более вариантов осуществления. Может быть очевидно, что такие варианты осуществления могут быть применены на практике без этих конкретных деталей.
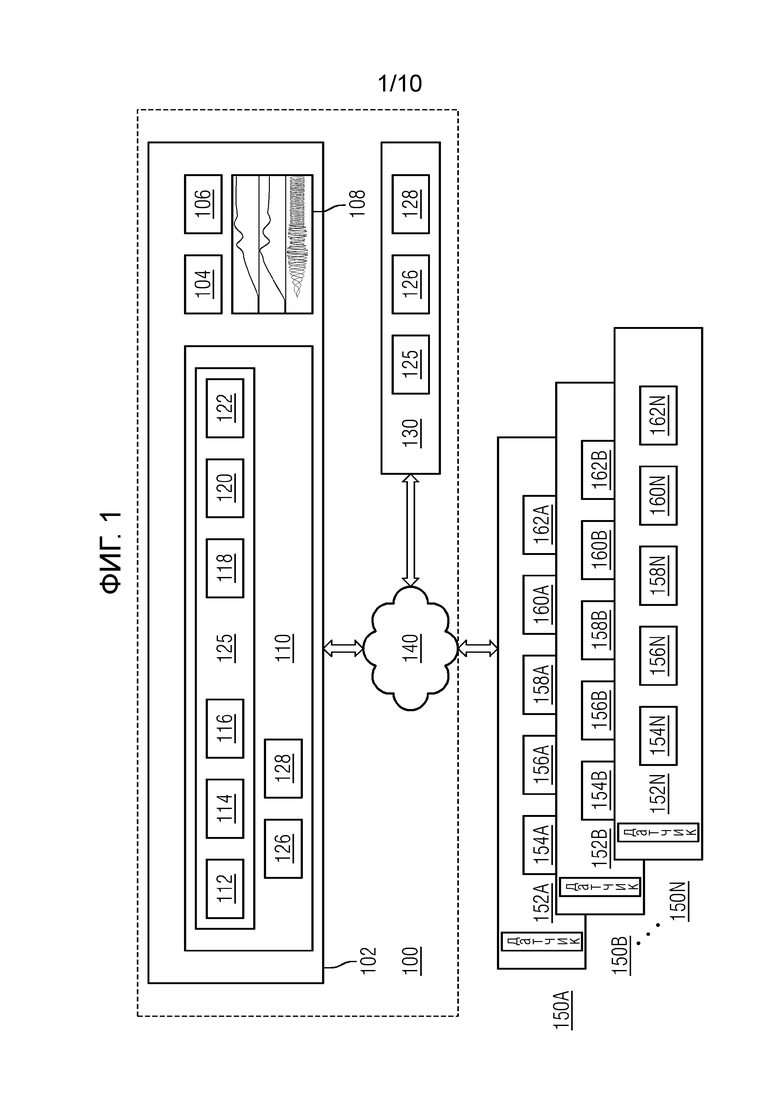
Фиг. 1 иллюстрирует блок-схему системы 100, включающей в себя блок 102 моделирования для управления объектами 150A-150N добычи, согласно варианту осуществления настоящего изобретения. Объекты 150A-150N добычи включают в себя устройства 152A-152N, которые формируют и передают данные датчиков, ассоциированные с соответствующим объектом добычи, в блок 102 моделирования. В варианте осуществления устройства 152A-N являются частью системы 100.
Устройства 152A-152N измеряют рабочие параметры соответствующих объектов 150A-150N добычи. Термин "рабочий параметр" ссылается на одну или более характеристик объекта добычи. Например, рабочие параметры включают в себя температуру окружающей среды, давление окружающей среды, данные о вибрации от систем на объекте, напряжение, магнитный поток и т.д.
Объекты 150A-150N добычи также включают в себя множество систем для выполнения различных операций добычи. Системы включают в себя блок 154A-154N подачи, блок 156A-156N трансформатора, циклоконвертер 158A-158N, кольцевой двигатель 160A-160N и блок 162A-162N нагрузки. Блок 154A-154N подачи питания может также называться сетью 154A-154N подачи питания и может включать в себя распределительное устройство среднего напряжения. Блок 162A-1060N нагрузки включает в себя тормозные системы и нагрузку дробилки соответствующего объекта добычи.
Система 100 включает в себя блок 102 моделирования, который соединяется с возможностью связи с объектами 150A-150N добычи через сетевой интерфейс 140. Сетевой интерфейс 140 может включать в себя проводное соединение для передачи данных, такое как Ethernet, и/или беспроводное соединение для передачи данных, такое как, например, WLAN, 2G, 3G, 4G или 5G-сеть.
Блок 102 моделирования включает в себя приемопередатчик 104 и один или более вычислительных блоков 106, реализованных как программируемые пользователем вентильные матрицы (FPGA). В варианте осуществления вычислительные блоки 106 могут включать в себя сочетание множества FPGA и центральных процессоров (CPU). Блок 102 моделирования также включает в себя графический пользовательский интерфейс (GUI) 108, чтобы предоставлять возможность пользователю управлять блоком 102 моделирования. Блок 102 моделирования также включает в себя память 110, сконфигурированную, чтобы хранить компьютерные программные инструкции, определенные посредством модулей, например, модуля 125 моделирования.
Сетевой интерфейс 140 также предоставляет доступ к облачной вычислительной платформе 130 для связи с объектами 150A-150N добычи. Используемый в данном документе термин "облачное вычислительное окружение" относится к среде обработки, содержащей конфигурируемые вычислительные физические и логические ресурсы, например, сети, серверы, хранилище, приложения, службы и т.д., и данные, распределенные по сети 140. Облачная вычислительная платформа 130 конфигурируется с помощью памяти и процессора, чтобы хранить и исполнять модуль 125 моделирования.
Модуль 125 моделирования, когда исполняется, конфигурируется, чтобы формировать модели объекта для объектов 150A-150N добычи. Модуль 125 моделирования включает в себя модули 112, 114, 116, 118 и 120, чтобы формировать модели системы для систем 154A-N, 156A-N, 158A-N, 160A-N и 162A-N на объектах 150A-150N добычи.
Модуль моделирования включает в себя генератор 112 модели подачи питания, чтобы формировать модели подачи питания для блоков 154A-N подачи питания. Модели подачи питания формируются, по меньшей мере, на основе напряжения источника и напряжения подачи питания (т.е., 11, 20, 30 кВ). Дополнительно, модели подачи питания могут также быть сформированы на основе предварительно определенных соотношений между током/напряжением, измеренными в узлах в блоках 154A-N подачи питания.
Модуль 125 моделирования включает в себя генератор 114 модели трансформатора, чтобы формировать модель трансформатора для блоков 156A-N трансформаторов. Модель трансформатора формируется на основе напряжения подачи питания, измеренного на выходе блоков 154A-N подачи питания, и напряжения трансформатора, измеренного на выходе блоков 156A-N трансформаторов. В варианте осуществления модель трансформатора формируется на основе электрического режима работы внутренних компонентов блока трансформатора.
Модуль 125 моделирования также включает в себя генератор 116 модели преобразователя, сконфигурированный, чтобы формировать модели конечных автоматов для выпрямителей в циклоконвертере 158A-N. В некоторых вариантах осуществления объекты 150A-N добычи могут включать в себя выпрямители возбуждения. В таких вариантах осуществления генератор 116 модели преобразователя конфигурируется, чтобы формировать модели возбуждения для выпрямителей возбуждения. В варианте осуществления генератор 116 модели преобразователя исполняется на множестве FPGA, чтобы обеспечивать быстрое моделирование в реальном времени циклоконвертеров 158A-N.
Модели конечных автоматов формируются, по меньшей мере, на основе пусковых импульсов одного или более тиристоров циклоконвертеров 158A-N. Дополнительно, модели конечных автоматов также формируются на основе функции напряжения и тока либо от блоков 156A-N трансформаторов, либо от блока 154A-N подачи питания. Формирование модели конечного автомата дополнительно разъясняется на фиг. 1B, 1C и 1D.
Модуль 125 моделирования включает в себя генератор 118 модели двигателя, чтобы формировать модели двигателя для двигателя 160A-N на основе скорости, выводимой из моделей нагрузки.
Модуль 125 моделирования дополнительно включает в себя генератор 120 модели нагрузки. Генератор 120 модели нагрузки конфигурируется, чтобы формировать модели нагрузки для блоков 162A-N нагрузки. Генератор 120 модели нагрузки дополнительно конфигурируется, чтобы формировать модель тормоза для тормозных систем. Модели нагрузки формируются на основе крутящего момента, выводимого из двигателя 160A-N. Модуль 125 моделирования включает в себя модуль 122 валидации. Модуль 122 валидации конфигурируется, чтобы валидировать модели подачи питания, модели трансформатора, модели конечного автомата и модели нагрузки (совокупно называемые моделями системы). Модуль 122 валидации конфигурируется, чтобы совместно моделировать модели системы, чтобы гарантировать, что модели системы действуют как виртуальные копии ассоциированной системы.
Модели объекта формируются из моделей системы. Модуль 125 моделирования конфигурируется, чтобы определять зависимости между моделями системы. Зависимости определяются посредством физических соотношений между моделями системы. Зависимости между моделями системы определяются на основе, по меньшей мере, одного из технических чертежей, блок-схем последовательности операций процесса, карты компоновки объекта добычи и взаимосвязи между точками данных в данных датчиков. Фиг. 5 иллюстрирует формирование моделей объекта на основе зависимостей между моделями системы.
Модели объекта могут быть отображены на GUI 108 посредством графических представлений. Объекты 150A-150N добычи управляются посредством анализа графических представлений. В некоторых вариантах осуществления объекты 150A-150N добычи могут управляться посредством обнаружения аномалий в работе объектов 150A-150N добычи.
В некоторых вариантах осуществления память 110 и облачная вычислительная платформа 130 могут дополнительно включать в себя модуль 126 прогнозирования и модуль 128 оптимизации. Модуль 126 прогнозирования конфигурируется, чтобы прогнозировать работу новых систем, которые могут быть добавлены в объекты 150A-N добычи. Дополнительно, модуль 128 оптимизации конфигурируется, чтобы прогнозировать и валидировать оптимизированные входные сигналы для улучшения работы объектов 150A-N добычи.
GUI 108 используется для отображения спрогнозированной работы новых систем. Дополнительно, GUI 108 используется для отображения работы объекта добычи, чтобы валидировать оптимизированные входные сигналы. В варианте осуществления блок 102 моделирования может быть соединен с возможностью связи с устройством отображения, сконфигурированным для отображения трехмерных интерактивных моделей объектов 150A-N добычи одновременно или последовательно.
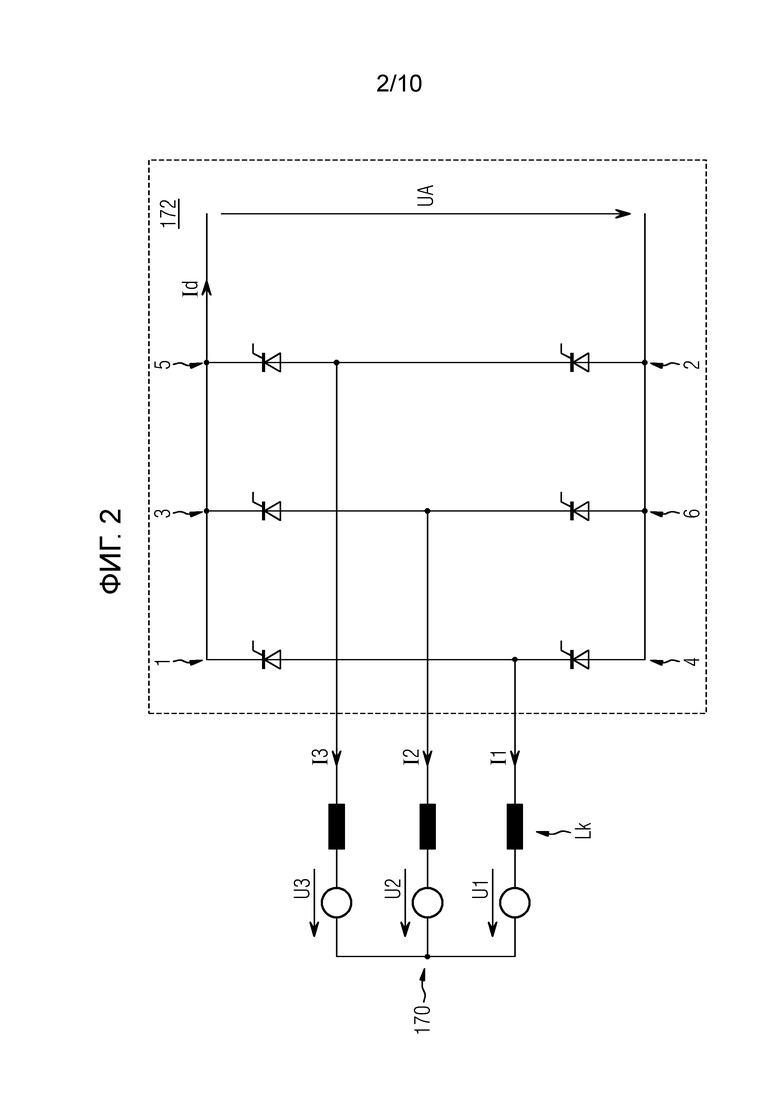
Фиг. 2-4 иллюстрируют формирование модели конечного автомата для выпрямителей в циклоконвертере 158A, согласно варианту осуществления настоящего изобретения.
Фиг. 2 иллюстрирует принципиальную схему 170 выпрямителя в циклоконвертере 158A. Принципиальная схема иллюстрирует преобразовательный мост 172 на тиристорах с тиристорами 1, 2, 3, 4, 5 и 6. Напряжение питания является трехфазным электропитанием с напряжением U1, U2, U3, с индуктивностью Lk и током I1, I2 и I3. Ток Id и выходное напряжение UA наблюдаются на концах преобразовательного моста 172 на тиристорах.
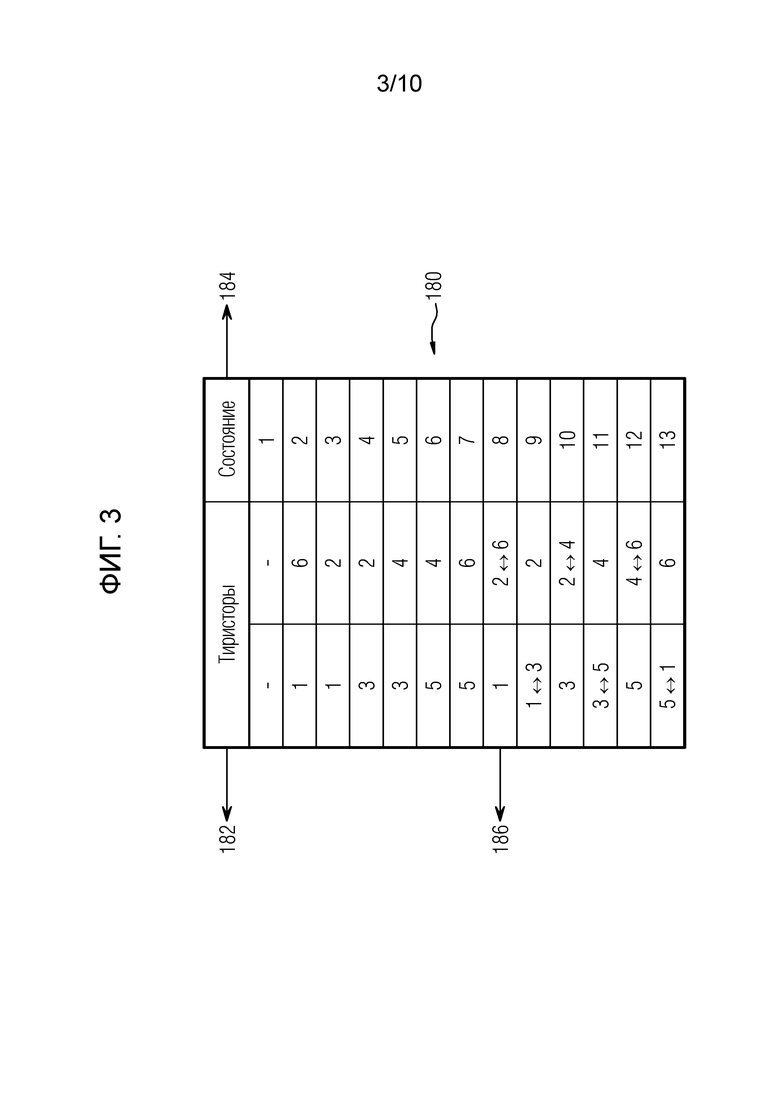
Фиг. 3 иллюстрирует матрицу 180 изменения состояния с активными тиристорами 182 и ассоциированными состояниями 184 преобразователя. Матрица 180 иллюстрирует переход от одного активного тиристора к другому. Активизация тиристора осуществляется посредством пусковых импульсов или изменения токов I1, I2 и I3. Дополнительно, специалисту в области техники должно быть понятно, что состояния 184 могут изменяться на основе фаз напряжения. Дополнительно, состояния 184 могут изменяться, если включение тиристора не является нормальным. Кроме того, в случае ошибочных импульсов и двойной коммутации, состояния 184 могут изменяться. Соответственно, матрица 180 изменения состояния является вариантом осуществления, который может быть обновлен, чтобы включать в себя вышеупомянутые изменения.
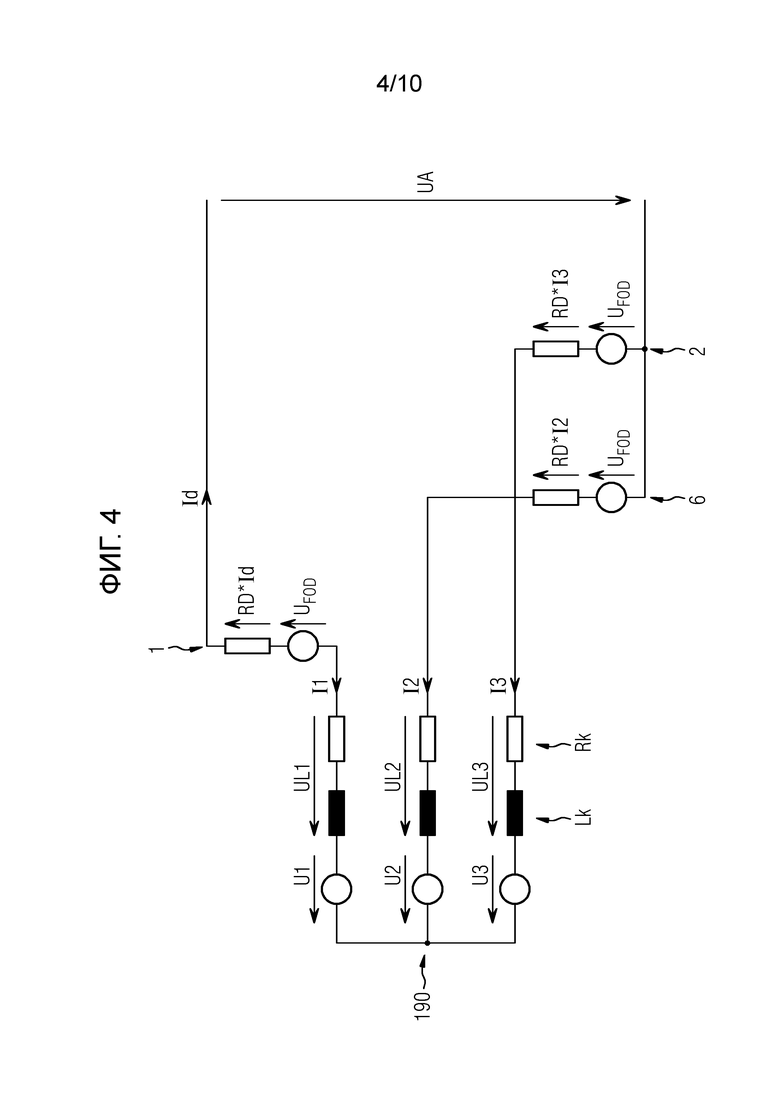
Фиг. 4 является эквивалентной схемой 190 для выпрямителя в циклоконвертере 158A в состоянии 8 (указанном ссылочным номером 186). В состоянии 8 тиристор 1 является активным, и протекание тока переходит от тиристора 2 к тиристору 6. Тиристоры 1, 2 и 6 моделируются посредством характеристики прогиба. Дополнительно, как иллюстрировано, тиристоры 1, 2 и 6 моделируются как сочетание сопротивления (RD) * ток и напряжение UFOD. Дополнительно, индуктивность Lk моделируется как индуктивность и сопротивление Rk.
Эквивалентная схема 190 может быть использована для определения значения выходного напряжения UA. Например, следующее уравнение используется для определения выходного напряжения UA.

Напряжение на концах индуктивности Lk и сопротивления Rk определяется следующим образом для трехфазного напряжения U1, U2, U3.
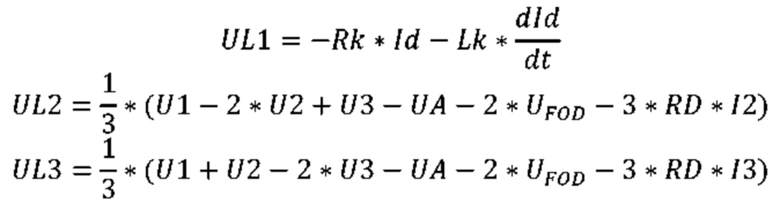
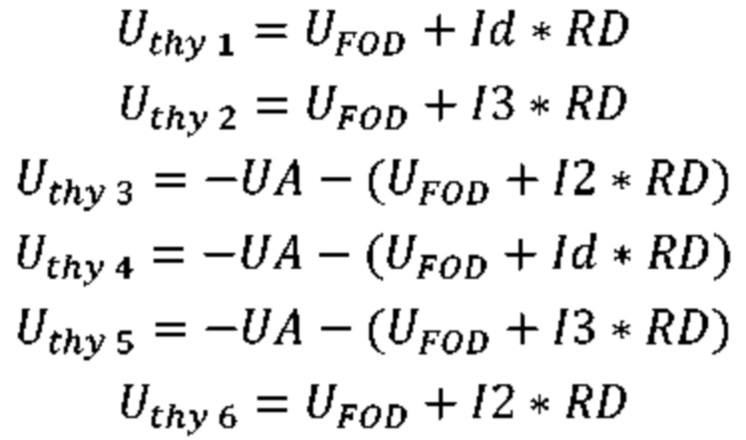
Дополнительно, напряжение тиристоров на концах тиристоров 1, 2, 3, 4, 5 и 6 определяется, как указано ниже.
Вышеупомянутое определение может быть выполнено для всех состояний 184. В варианте осуществления, вышеуказанное определение выполняется параллельно для всех состояний 184, а выходное напряжение UA для выпрямителя определяется посредством выбора с помощью мультиплексора.
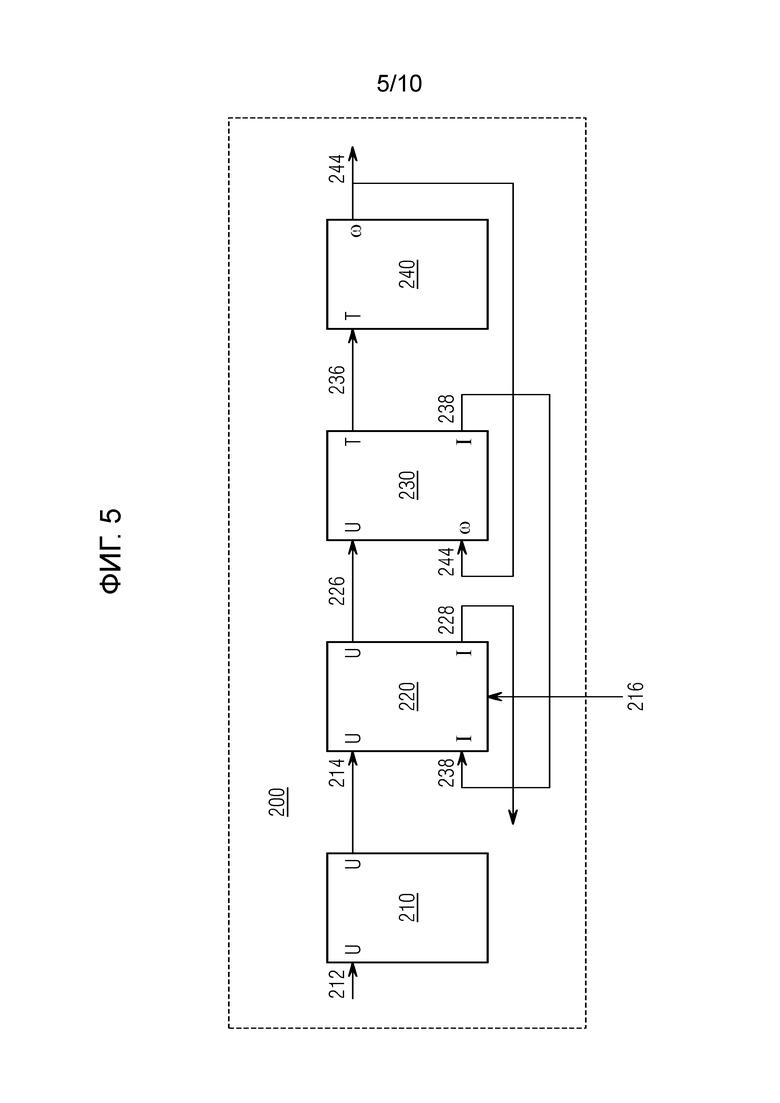
Фиг. 5 иллюстрирует блок-схему модели 200 объекта для объекта 150A добычи на фиг. 1, согласно варианту осуществления настоящего изобретения. Модель 200 объекта включает в себя модели 210, 220, 230 и 240 системы. Для цели фиг. 5 модели системы включают в себя модель 210 трансформатора, модель 220 конечного автомата, модель 230 двигателя и модель 240 нагрузки. Дополнительно, как показано на фиг. 5, зависимости между моделями системы иллюстрируются с помощью соединений 238 и 244 для обратной связи.
Модель 210 трансформатора формируется на основе напряжения 212 подачи питания, измеренного на выходе блоке 154 подачи питания. Напряжение 214 трансформатора выводится из модели 210 трансформатора и сравнимо с напряжением, измеренным на выходе блока 156A трансформатора. Модель 210 трансформатора формируется на основе электрического режима работы внутренних компонентов блока 156A трансформатора.
Модель 220 конечного автомата формируется на основе пусковых импульсов 216, напряжения 214 трансформатора и тока 238 двигателя из модели 230 двигателя с использованием принципиальной схемы 190 и матрицы 180 изменения состояния.
Дополнительно, модель 230 двигателя формируется на основе выходного напряжения (UA) 226 из модели 220 конечного автомата и скорости 244, выведенной из модели 240 нагрузки. Модель 240 нагрузки принимает крутящий момент 236, выведенный из модели 230 двигателя, чтобы формировать скорость 244.
Специалисту в области техники может быть понятно, что зависимость на фиг. 5 является примером. Множество таких зависимостей может быть сформировано на основе технических чертежей, блок-схем последовательности операций процесса, карты компоновки объекта 150A добычи и т.д. В варианте осуществления данные датчиков от устройств 152A анализируются посредством выполнения анализа чувствительности, чтобы определять зависимости в моделях системы.
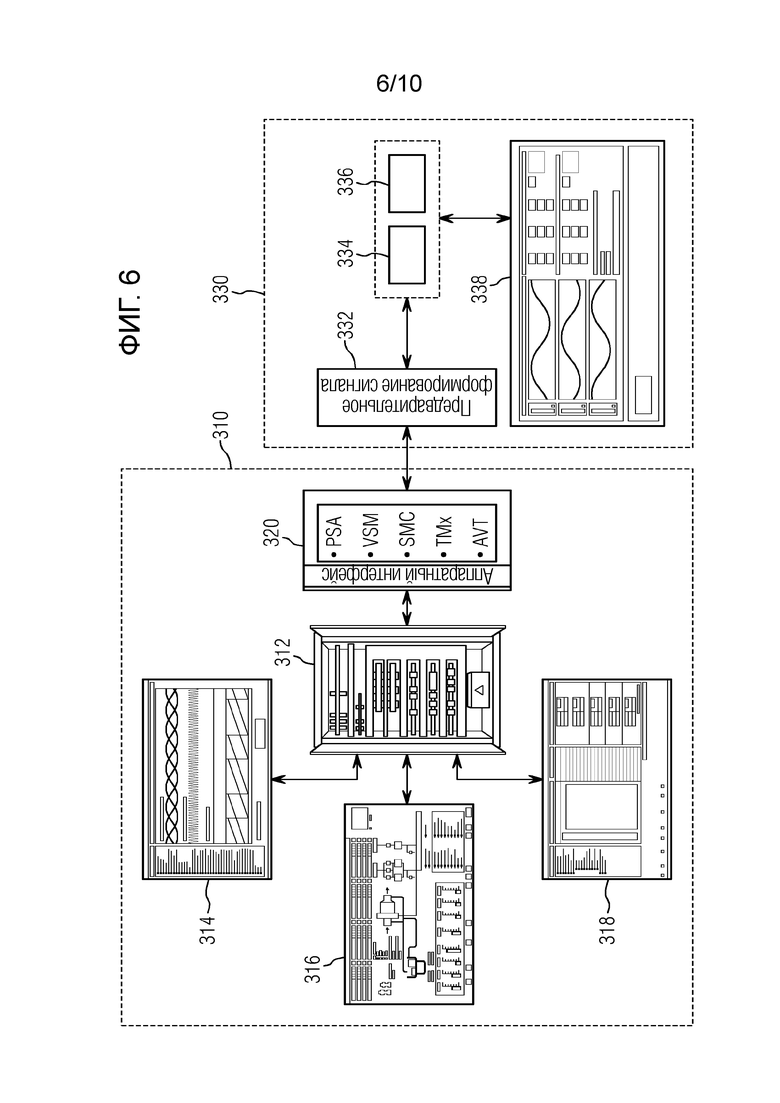
Фиг. 6 иллюстрирует блок-схему блока 330 моделирования для управления объектом 310 добычи, согласно варианту осуществления настоящего изобретения. Аналогично объектам добычи на фиг. 1, объект 310 добычи включает в себя блок подачи питания, блок трансформатора, блок 312 управления циклоконвертером, двигатель и блок нагрузки. Блок 330 моделирования может быть соединен с возможностью связи с объектом 310 добычи через сетевой интерфейс.
Блок 312 управления циклоконвертером конфигурируется с номиналом мощности 3,2-40 МВА. Выходное напряжение может изменяться от 1500-4000 В. Дополнительно, тиристоры в циклоконвертере 312 размещаются в виде трехфазных мостов в 6-импульсном, 12-импульсном или 24-импульсном соединении.
Циклоконвертер 312 может управляться и вводиться в эксплуатацию посредством различных устройств и компьютерных программных инструкций. В варианте осуществления объект 310 добычи также включает в себя графический пользовательский интерфейс (GUI) 314, модуль 316 автоматизации и модуль 318 ввода в эксплуатацию.
GUI 314 используется для отображения и визуализации работы циклоконвертера 312. Например, пусковые импульсы тиристоров, входное напряжение, выходное напряжение и т.д. могут быть отображены. Модуль 316 автоматизации конфигурируется, чтобы отображать межсоединения на объекте 310 добычи. Модуль 316 автоматизации может также быть использован для указания оператору того, существует ли аномалия на объекте добычи. Модуль 318 ввода в эксплуатацию, в общем, используется во время ввода в эксплуатацию циклоконвертера 312. Модуль 318 ввода в эксплуатацию может также быть использован для реализации диагностики через GUI 314.
Кроме того, объект 310 добычи дополнительно включает в себя интерфейс 320 аппаратных средств, предоставляющий возможность связи между блоком 330 моделирования и циклоконвертером 312.
Блок 330 моделирования включает в себя блок 332 предварительного формирования сигнала, блоки 334 и 336 обработки и GUI 338. Блок 332 предварительного формирования сигнала может включать в себя платы ввода/вывода для аналогового и цифрового сигнала. Чтобы предоставлять возможность быстрого моделирования, блок 332 предварительного формирования сигнала включает в себя специализированные платы. Блок 332 предварительного формирования сигнала конфигурируется, чтобы предоставлять адаптации сигнала к конкретным напряжениям электрической системы (12 В, 24 В, и т.д.); также для токовых интерфейсов.
Блоки 334 и 336 обработки включают в себя программируемую пользователем вентильную матрицу (FPGA) 334 и центральные процессоры (CPU) 336. FPGA 334 может быть использована для быстрого моделирования в режиме онлайн систем на объекте 310 добычи. Дополнительно, CPU 336 может быть использован для моделирования в автономном режиме (режиме офлайн). Например, модель конечного автомата для выпрямителей циклоконвертера 312 может выполняться на FPGA 334. Модель нагрузки для блока нагрузки может исполняться на CPU 336. Использование блоков 334 и 336 обработки выполняется на основе требования для быстрого моделирования в режиме онлайн.
GUI 338 конфигурируется, чтобы отображать выходную информацию из блоков 334 и 336 обработки. Дополнительно, GUI 338 используется для изменения параметров, ассоциированных с моделями, реализованными на блоках 334 и 336 обработки.
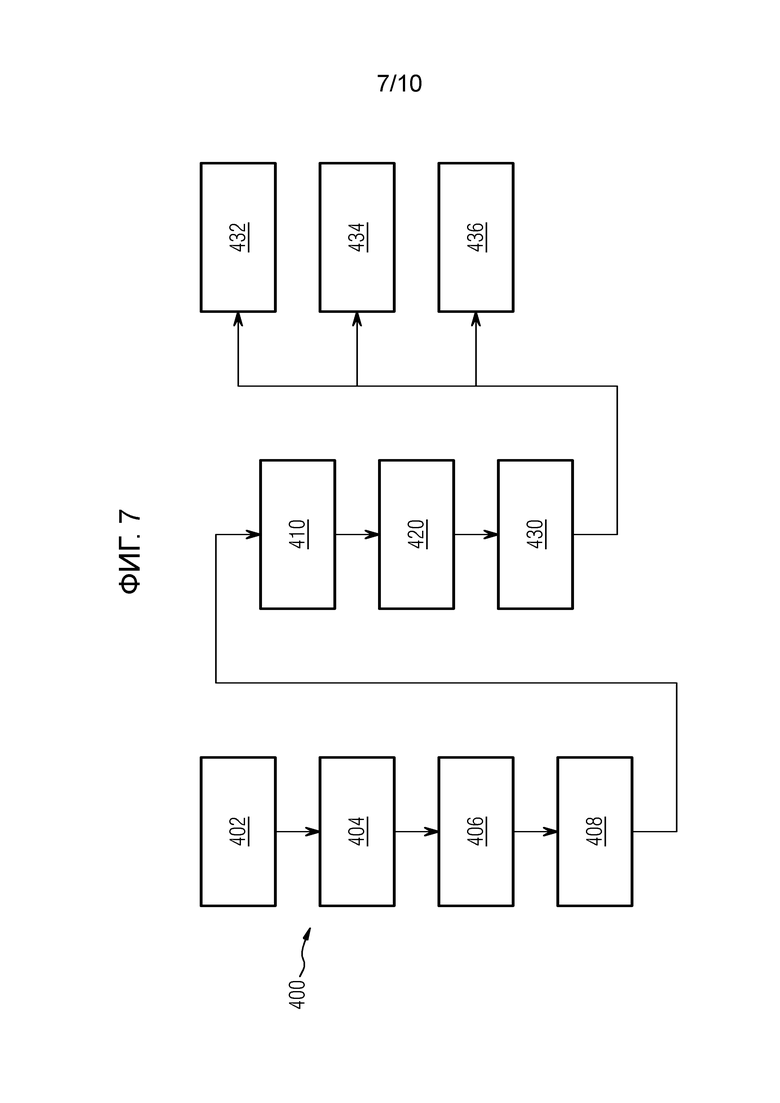
Фиг. 7 иллюстрирует способ 400 управления объектом добычи, согласно варианту осуществления настоящего изобретения. Способ 400 начинается на этапе 402 с приема входного сигнала, данных датчиков и выходного сигнала относительно множества систем на объекте добычи.
На этапе 404 модель подачи питания для блока подачи питания и модель трансформатора для блока трансформатора формируются. В варианте осуществления этап 404 может быть выполнен в автономном режиме перед вводом в эксплуатацию блока подачи питания и блока трансформатора. Дополнительно, модель подачи питания и модель трансформатора могут быть обновлены после установки и во время работы объекта добычи.
На этапе 406 модель конечного автомата для циклоконвертера и модель двигателя для двигателя формируются. В варианте осуществления этап 406 выполняется в FPGA, чтобы предоставлять возможность быстрого моделирования аппаратных средств в контуре в режиме реального времени циклоконвертера и двигателя. Используемый в данном документе термин "моделирование аппаратных средств в контуре" относится к этапу способа, на котором один или более реальных компонентов взаимодействуют с компонентами, которые моделируются в реальном времени. Соответственно, модель конечного автомата принимает входные данные от циклоконвертера, развернутого на объекте добычи. Выходные данные модели конечного автомата могут быть дополнительно использованы для модификации входных сигналов для циклоконвертера.
В варианте осуществления этап 406 может включать в себя формирование модели конечного автомата для выпрямителей циклоконвертера, по меньшей мере, на основе пусковых импульсов для одного или более тиристоров выпрямителей и функции напряжения и тока, по меньшей мере, от блока трансформатора и блока подачи питания.
Этап 406 может включать в себя определение состояний преобразователя для тиристоров выпрямителей в циклоконвертере, состояния преобразователя формируются на основе пусковых импульсов, вводимых в циклоконвертер. Состояния преобразователей используются для формирования модели конечного автомата. Чтобы определять состояние преобразователя, значения состояний может быть необходимо прогнозировать. Соответственно, этап 406 может включать в себя прогнозирование значений состояний для состояний преобразователя на основе пускового импульса, напряжения тиристоров и тока тиристоров.
Этап 406 может дополнительно включать в себя мультиплексирование значений состояния для определения состояний преобразователя. Дополнительно, этап 406 может включать в себя прогнозирование изменения состояния для выпрямителей на основе текущего состояния выпрямителей циклоконвертера.
В варианте осуществления этап 406 может включать в себя определение эквивалентной схемы для состояний преобразователя. Например, тиристор может быть смоделирован с точки зрения напряжения, тока и сопротивления. Дополнительно, различные тиристоры могут быть "включены" или "выключены". Соответственно, эквивалентная схема для каждого состояния преобразователя может быть сформирована.
Дополнительно, в варианте осуществления, условия, такие как ошибочные импульсы и/или двойные коммутации, могут быть смоделированы на основе исторических данных, ассоциированных с циклоконвертером. В таком варианте осуществления моделирование может выполняться в автономном режиме с помощью CPU.
На этапе 408 модель нагрузки и модель прерывания питания для блока нагрузки и блока прерывателя формируются. В варианте осуществления этап 408 выполняется в CPU.
Модели, сформированные на этапах 404, 406 и 408, совокупно называются моделями системы.
На этапе 410 модели системы валидируются посредством совместного моделирования моделей системы на одной или более платформах моделирования. Например, модель системы может быть сформирована на платформе моделирующей симуляции схемы и валидируется на настраиваемой платформе динамического моделирования на основе блоков. Чтобы гарантировать, что совместное моделирование правильно выполняется, этап 410 может включать в себя синхронизацию совместно моделирования моделей системы на платформах моделирования.
В другом варианте осуществления этап 410 может быть выполнен посредством сравнения смоделированных выходных данных из моделей системы и выходных сигналов из систем на объекте добычи. Разница в смоделированных выходных данных и выходных сигналах используется в качестве обратной связи, чтобы обновлять модели системы.
Формирование в реальном времени моделей системы может потребоваться для наблюдения за работой объекта добычи без какой-либо задержки. Соответственно, этап 410 может включать в себя формирование одной из модели конечного автомата, модели двигателя и модели нагрузки с помощью программируемой пользователем вентильной матрицы (FPGA).
На этапе 420 зависимости между моделями системы используются для формирования модели объекта для объекта добычи. Соответственно, используемый в данном документе термин "модель объекта" относится к виртуальной копии объекта добычи. Модель объекта предоставляет возможность наблюдения состояния объекта добычи. Дополнительно, модель объекта преимущественно используется для прогнозирования и анализа аномалий на объекте добычи.
Этап 420 может включать в себя определение зависимостей между моделями системы на основе, по меньшей мере, одного из технических чертежей, блок-схем последовательности операций процесса, карты компоновки объекта добычи и взаимосвязи между точками данных в данных датчиков. Например, процесс и схемы оснащения измерительными приборами объекта добычи могут быть использованы, чтобы определять системы, которые ассоциируются друг с другом. В другом примере анализ чувствительности может быть выполнен по данным датчиков, чтобы определять взаимосвязь между точками данных. Взаимосвязь между точками данных может быть использована для определения ассоциативной связи между системами.
В варианте осуществления зависимости определяются так, что модель конечного автомата для выпрямителей циклоконвертера формируется на основе тока двигателя, выводимого из модели двигателя, предоставленной в качестве входных данных для модели конечного автомата. В другом варианте осуществления модель двигателя для двигателя формируется на основе выходных данных скорости из модели нагрузки, предоставленной в качестве входных данных для модели двигателя.
На этапе 430 модель объекта используется для управления объектом добычи. Управление объектом добычи может выполняться посредством наблюдения удаленного состояния и управления аномалией.
На этапе 432 аномалии в работе объекта добычи идентифицируются на основе данных датчиков и выходных сигналов. Аномалии могут быть идентифицированы с помощью предварительно определенного порогового значения для данных датчиков и выходных сигналов. В другом варианте осуществления аномалии могут быть идентифицированы с помощью алгоритмов машинного обучения, таких как кластеризация методом k-средних, диаграммы размаха и т.д.
Этап 432 может дополнительно включать в себя определение параметров состояния, вызывающих аномалии посредством моделирования возможных условий аномалии с помощью модели объекта. Этап 432 может включать в себя прогнозирование оптимизированных входных сигналов для объекта добычи на основе аномалий и параметров состояния. В варианте осуществления параметры состояния и оптимизированные входные сигналы сопоставляются в логарифмической таблице.
Этап 432 может включать в себя валидацию оптимизированных входных сигналов посредством формирования примеров моделирования для оптимизированных входных сигналов для объекта добычи с помощью модели объекта. Например, примеры моделирования формируются, когда оптимизированные входные сигналы предоставляются в качестве входных данных для модели объекта. Режим работы модели объекта анализируется посредством определения того, попадают ли выходные значения моделей системы в пределы порогового значения. Этап 432 может дополнительно включать в себя инициирование работы объекта добычи на основе валидированных оптимизированных входных сигналов. Дополнительно, объект добычи работает согласно оптимизированным входным сигналам.
На этапе 434 работа новой системы прогнозируется с помощью модели объекта. Новая система может включать в себя вновь введенную в эксплуатацию систему или существующую систему с обновлениями аппаратных средств и программного обеспечения. Этап 434 может дополнительно включать в себя оптимизацию проектных параметров новой системы на основе спрогнозированной работы. Например, новая система может ссылаться на новый метод модуляции для пусковых импульсов тиристоров. Угол отпирания может быть оптимизирован, чтобы вести к уменьшению реактивной мощности.
На этапе 436 моделируются этапы ввода в эксплуатацию по модели объекта. Моделирование этапов ввода в промышленную эксплуатацию может быть использовано для сравнения работы объекта добычи относительно существующих руководств.
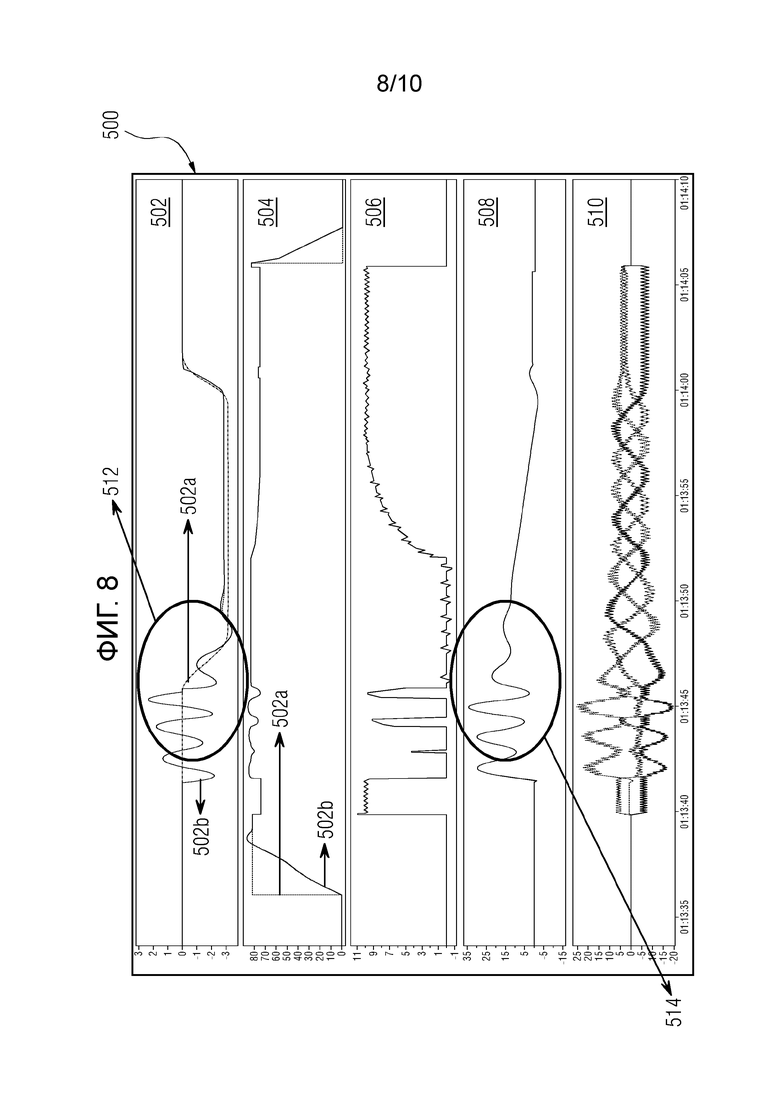
Реализация этапов 432, 434 и 436 может быть визуализирована посредством графиков, отображаемых на GUI. Фиг. 8-10 иллюстрируют реализацию этапов 432 и 434.
Фиг. 8, 9 и 10 являются графиками, которые иллюстрируют оптимизацию входных сигналов с помощью модели объекта для объекта добычи. Примеры моделирования по модели объекта используются для идентификации наиболее оптимальных входных сигналов и называются "оптимизированными входными сигналами".
Фиг. 8 иллюстрирует тренд 500 объекта с помощью графиков 502-510.
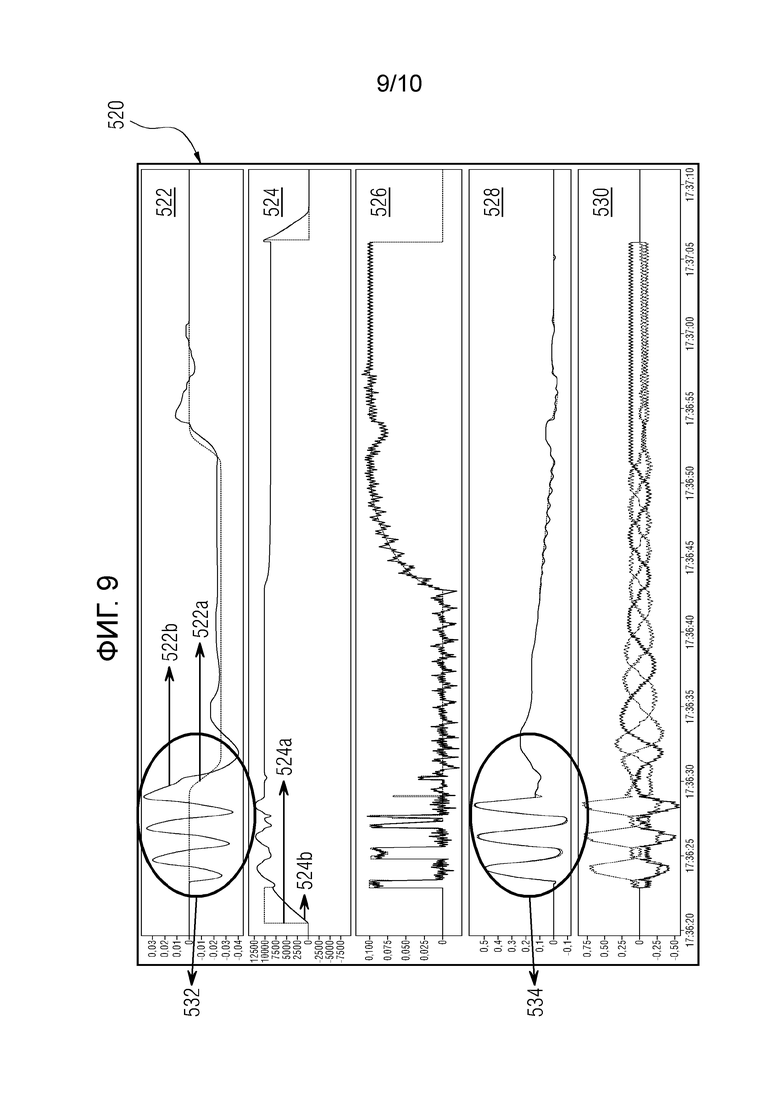
Фиг. 9 иллюстрирует смоделированный тренд 520 с помощью графиков 522-530.
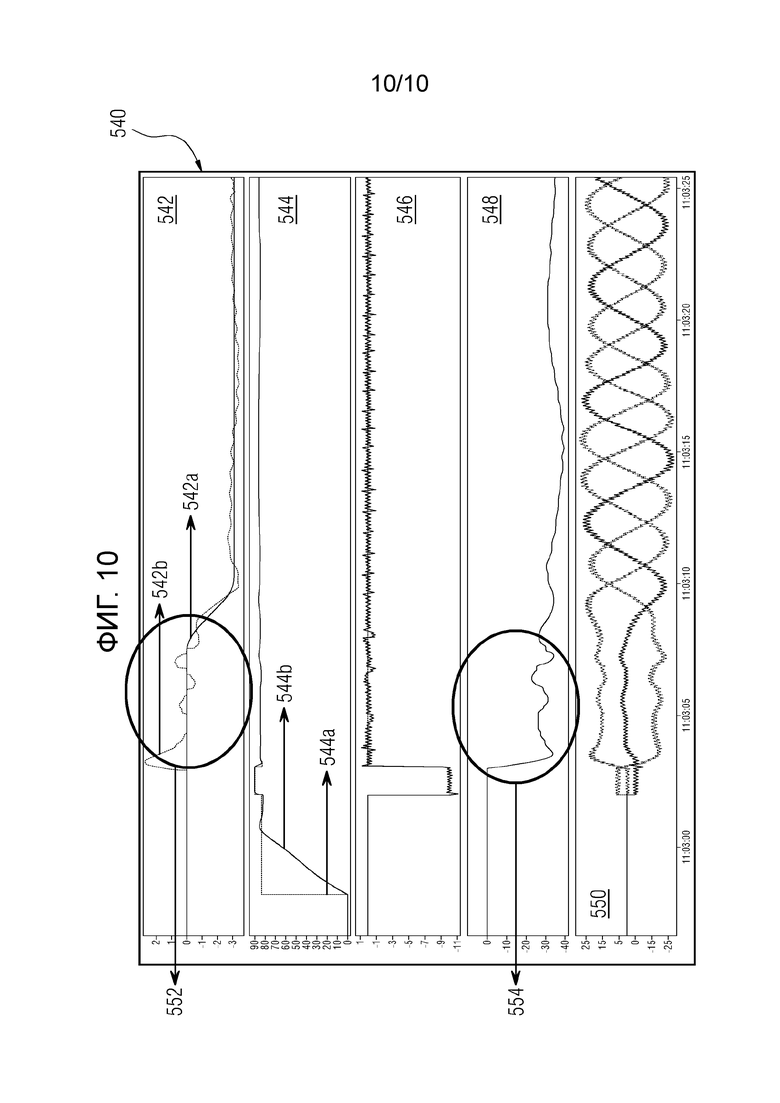
Фиг. 10 иллюстрируют оптимизированный тренд 540 с помощью графиков 542-550.
Графики 502, 522 и 542 являются графиками скорости. На фиг. 8 график 502 скорости включает в себя опорную скорость 502a и измеренную скорость 502b. На фиг. 9 график 522 скорости включает в себя смоделированную опорную скорость 522a и смоделированную скорость 522b. На фиг. 10 график 542 скорости включает в себя опорную скорость 542a для оптимизированных входных сигналов и измеренную скорость 542b для оптимизированных входных сигналов.
Графики 504, 524 и 544 являются графиками тока возбуждения (EC). На фиг. 8 EC-график 504 включает в себя опорный EC 504a и измеренный EC 504b. На фиг. 9 график 524 скорости включает в себя смоделированный опорный EC 524a и смоделированный EC 552b. На фиг. 10 EC-график 544 включает в себя опорный EC 544a для оптимизированных входных сигналов и измеренный EC 544b для оптимизированных входных сигналов.
Графики 506, 526, 546 являются графиками тока намагничивания. Графики 508, 528 и 548 являются графиками тока крутящего момента. Дополнительно, графики 510, 530 и 550 являются графиками трехфазного тока. Графики 506, 508 и 510 измеряются на месте перед использованием оптимизированных входных сигналов. Графики 526, 528 и 530 являются смоделированными графиками, сформированными из модели объекта. Графики 546, 548 и 550 измеряются на месте объекта добычи, после того как оптимизированные входные сигналы реализуются.
На фиг. 8 и 5B колебание дробилки является очевидным на графиках 502, 508 и 522, 528, соответственно. Колебания 502 и 508 дробилки наблюдаются на месте объекта добычи. Модель объекта также указывает колебания 522 и 528 дробилки.
Колебания 522 и 528 дробилки были использованы для дальнейшего анализа параметров состояния, ассоциированных с колебаниями 522 и 528 дробилки. Вероятные причины колебаний дробилки определяются на основе технических чертежей объекта добычи.
Например, в настоящем случае технические чертежи объекта добычи указывают привод дробилки без зубчатой передачи, который удерживается тормозами в неуравновешенном положении. Соответственно, вероятная причина для колебания 522 и 528 дробилки может быть связана с работой тормозов. Модель объекта используется для моделирования аномалий в работе тормозов. В настоящем примере определяется, что задержка в размыкании тормозов может вызывать колебания дробилки. Соответственно, параметры состояния для времени размыкания тормоза были идентифицированы. Дополнительно, отложенное размыкание тормоза моделируется по объекту добычи и сравнивается с графиками 522 и 528.
Когда параметры состояния идентифицируются, оптимизированные входные сигналы прогнозируются на основе аномалии и параметров состояния. Для примера отложенного размыкания тормоза значения контроллера скорости идентифицируются в качестве входных сигналов, которые должны быть оптимизированы. Дополнительно, многочисленные значения контроллера скорости моделируются по модели объекта. Реализация оптимизированных входных сигналов иллюстрируется на фиг. 10, график 542 скорости и график 548 крутящего момента указывают уменьшенные колебания дробилки по ссылкам 552 и 554.
В работе оптимизированные входные сигналы для контроллера скорости передаются инженеру по вводу в эксплуатацию на объекте добычи. Инженер по вводу в эксплуатацию реализует оптимизированные входные сигналы. В другом варианте осуществления оптимизированные входные сигналы реализуются с помощью облачной вычислительной платформы, на которой релевантные переменные обновляются. Обновленные переменные отражаются на объекте добычи. Настоящее изобретение может принимать форму компьютерного программного продукта, содержащего программные модули, доступные с компьютерно-используемого или компьютерно-читаемого носителя, хранящего программный код для использования посредством или в соединении с одним или более компьютерами, процессорами или системой исполнения инструкций. В целях этого описания компьютерно-используемый или читаемый компьютером носитель может быть любым устройством, которое может содержать, хранить, передавать, распространять или переносить программу для использования посредством или в соединении с системой выполнения инструкций, оборудованием или устройством. Носитель может быть электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой (или оборудованием или устройством) или средами распространения самими по себе, поскольку носители сигнала не включены в определение физического компьютерно-читаемого носителя, может включать в себя полупроводниковую или твердотельную память, магнитную ленту, съемную компьютерную дискету, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), жесткий магнитный диск и оптический диск, такой как постоянное запоминающее устройство на компакт-диске (CD-ROM), считываемый/записываемый компакт-диск и DVD. И процессоры, и программный код для реализации каждого аспекта технологии, могут быть централизованы или распределены (или быть их сочетанием), как известно специалистам в области техники.
В то время как настоящее изобретение было описано подробно со ссылкой на некоторые варианты осуществления, следует понимать, что настоящее изобретение не ограничивается этими вариантами осуществления. С учетом настоящего раскрытия, множество модификаций и вариаций будут представляться специалистам в области техники без отступления от объема различных вариантов осуществления настоящего изобретения, как описано в данном документе. Объем настоящего изобретения, следовательно, определяется последующей формулой изобретения, а не предшествующим описанием. Все изменения, модификации и вариации, подпадающие под значение и диапазон эквивалентности формулы изобретения, должны рассматриваться в ее объема. Все предпочтительные варианты осуществления, заявленные в пунктах формулы изобретения на способ, могут также применяться к пунктам системы/устройства формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДЛЯ ДИАГНОСТИКИ ПРОМЫШЛЕННОГО ОБЪЕКТА НА ОСНОВЕ АНАЛИЗА АКУСТИЧЕСКИХ СИГНАЛОВ | 2020 |
|
RU2749640C1 |
| Компьютерно-реализуемый способ мониторинга и обработки данных для распознавания и классификации аномалий в работе установок и оптимизации их технического обслуживания и система для выполнения данного способа | 2021 |
|
RU2829543C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ДИАГНОСТИРОВАНИЯ ПРОМЫШЛЕННОГО ОБЪЕКТА | 2018 |
|
RU2707423C2 |
| Способ выявления аномалий в работе сети автоматизированной системы | 2020 |
|
RU2738460C1 |
| ОБНАРУЖЕНИЕ АНОМАЛИЙ В АВИАЦИОННОМ ДВИГАТЕЛЕ | 2009 |
|
RU2497173C2 |
| ЦИКЛОКОНВЕРТЕР И СПОСОБ ЕГО РАБОТЫ | 2007 |
|
RU2396691C1 |
| Система и способ обнаружений аномалий в технологической системе | 2016 |
|
RU2625051C1 |
| СПОСОБ И СИСТЕМА КОНЕЧНОГО АВТОМАТА ДЛЯ РАСПОЗНАВАНИЯ РАБОЧЕГО СОСТОЯНИЯ СЕНСОРА | 2018 |
|
RU2744908C1 |
| Территориально-распределенный испытательный комплекс (ТРИКС) | 2018 |
|
RU2691831C1 |
| СИСТЕМА И СПОСОБЫ ДЛЯ ОПТИМИЗАЦИИ ИЗВЛЕЧЕНИЯ И ЗАКАЧКИ, ОГРАНИЧЕННЫХ ОБРАБАТЫВАЮЩИМ КОМПЛЕКСОМ, В ИНТЕГРИРОВАННОМ ПЛАСТЕ-КОЛЛЕКТОРЕ И СОБИРАЮЩЕЙ СЕТИ | 2013 |
|
RU2600254C2 |
Изобретение относится к управлению объектами добычи с помощью моделирования в реальном времени. Техническим результатом является повышение эффективности управления объектами добычи с возможностью удаленного наблюдения и моделирования в реальном времени. В частности, заявлен способ управления объектом добычи, включающим в себя множество систем. Способ содержит этапы, на которых: формируют, в блоке моделирования, модели системы для одной или более систем из множества систем объекта добычи на основе входного сигнала, данных датчиков и выходного сигнала от множества систем на объекте добычи; формируют модель объекта для объекта добычи на основе зависимостей между указанными моделями системы, содержащих соединения для обратной связи между моделями системы; управляют объектом добычи посредством моделирования работы объекта добычи с помощью модели объекта. При этом управление объектом добычи содержит по меньшей мере один из этапов, на которых: прогнозируют оптимизированные входные сигналы для объекта добычи на основе аномалий в работе объекта добычи и ассоциированных параметров состояния, вызывающих аномалии, при этом аномалии идентифицируют на основе данных датчиков и выходных сигналов объекта добычи с использованием одного или более предварительно определенных пороговых значений или технологий машинного обучения, и при этом ассоциированные параметры состояния определяют посредством моделирования вероятных аномальных условий с использованием модели объекта, используя технологии коренных причин; валидируют оптимизированные входные сигналы посредством формирования смоделированных экземпляров для оптимизированных входных сигналов для объекта добычи с использованием модели объекта; прогнозируют работу новой системы, которая должна быть развернута на объекте добычи, при этом новая система включает в себя вновь введенную в эксплуатацию систему или систему, из множества систем, с одним из обновления аппаратных средств и обновления программного обеспечения и инициируют работу объекта добычи на основе валидированных оптимизированных входных сигналов. 4 н. и 9 з.п. ф-лы, 10 ил.
1. Компьютерно-реализованный способ управления объектом (150 A-N) добычи, включающим в себя множество систем, способ содержит этапы, на которых:
формируют, в блоке (102, 330) моделирования, модели (210, 220, 230, 240) системы для одной или более систем из множества систем объекта (150 A-N) добычи; при этом модели (210, 220, 230, 240) системы формируют на основе входного сигнала, данных датчиков и выходного сигнала от множества систем на объекте (150 A-N) добычи;
формируют модель (200) объекта для объекта (150 A-N) добычи на основе зависимостей между моделями (210, 220, 230, 240) системы, при этом зависимости содержат соединения (228, 238, 244) для обратной связи между моделями (210, 220, 230, 240) системы;
управляют объектом (150 A-N) добычи посредством моделирования работы объекта (150 A-N) добычи с помощью модели (200) объекта, при этом управление объектом (150 A-N) добычи содержит по меньшей мере один из этапов, на которых:
прогнозируют оптимизированные входные сигналы для объекта (150 A-N) добычи на основе аномалий в работе объекта добычи и ассоциированных параметров состояния, вызывающих аномалии, при этом аномалии идентифицируют на основе данных датчиков и выходных сигналов объекта добычи с использованием одного или более предварительно определенных пороговых значений или технологий машинного обучения, и при этом ассоциированные параметры состояния определяют посредством моделирования вероятных аномальных условий с использованием модели объекта, используя технологии коренных причин;
валидируют оптимизированные входные сигналы посредством формирования смоделированных экземпляров для оптимизированных входных сигналов для объекта (150 A-N) добычи с использованием модели (200) объекта;
прогнозируют работу новой системы, которая должна быть развернута на объекте (150 A-N) добычи, при этом новая система включает в себя вновь введенную в эксплуатацию систему или систему, из множества систем, с одним из обновления аппаратных средств и обновления программного обеспечения, и
инициируют работу объекта (150 A-N) добычи на основе валидированных оптимизированных входных сигналов.
2. Способ по п. 1, при этом одна или более систем включают в себя блок (154A-N) подачи питания, блок (156A-N) трансформатора, циклоконвертер (158A-N), двигатель (160A-N) и блок (162A-N) нагрузки, и при этом формирование модели системы содержит этапы, на которых:
формируют модель (220) конечного автомата для выпрямителей циклоконвертера (158A-N) на основе, по меньшей мере, пусковых импульсов (216) по меньшей мере одного тиристора циклоконвертера (158A-N) и функции напряжения (214) и тока (238), по меньшей мере, от блока (156A-N) трансформатора и модели (230) двигателя;
формируют модель (230) двигателя для двигателя (160A-N) как функцию, по меньшей мере, напряжения (226) циклоконвертера (158A-N), скорости (244) вращения, тока (238) двигателя и крутящего момента (236) двигателя; и
формируют модель (240) нагрузки для блока (162A-N) нагрузки на основе функции, по меньшей мере, крутящего момента (236) двигателя и скорости (244) вращения, при этом модели (210, 220, 230, 240) системы включают в себя модель (220) конечного автомата, модель (230) двигателя и модель (240) нагрузки.
3. Способ по п. 2, при этом формирование модели (220) конечного автомата содержит этап, на котором
определяют состояния преобразователя для тиристоров выпрямителей, состояния преобразователя формируют на основе пусковых импульсов, вводимых в циклоконвертер (158A-N).
4. Способ по п. 3, при этом формирование состояний преобразователя содержит этапы, на которых:
прогнозируют значения состояний для состояний преобразователя на основе пускового импульса, напряжения тиристоров и тока тиристоров; и
определяют состояния преобразователя на основе мультиплексированного выходного значения для значений состояния для состояний преобразователя.
5. Способ по любому из пп. 2-4, дополнительно содержащий этап, на котором
прогнозируют изменение состояния для циклоконвертера (158A-N) на основе текущего состояния циклоконвертера (158A-N).
6. Способ по любому из предшествующих пунктов, дополнительно содержащий этап, на котором
валидируют модели (210, 220, 230, 240) системы посредством совместного моделирования моделей (210, 220, 230, 240) системы на одной или более платформах моделирования.
7. Способ по п. 1, при этом формирование модели (200) объекта для объекта (150 A-N) добычи содержит этап, на котором:
определяют зависимости между моделями (210, 220, 230, 240) системы на основе по меньшей мере одного из технических чертежей, блок-схем последовательности операций процесса, карты компоновки объекта (150 A-N) добычи и взаимосвязи между точками данных в данных датчиков.
8. Способ по любому из предшествующих пунктов, по меньшей мере по пп. 2 и 7, дополнительно содержащий этапы, на которых:
формируют модель (220) конечного автомата для выпрямителей циклоконвертера (158A-N) на основе тока двигателя, выводимого из модели (230) двигателя, предоставляемого в качестве входных данных для модели (220) конечного автомата; и
формируют модель (230) двигателя для двигателя (160A-N) на основе скорости, выводимой из модели (240) нагрузки, предоставляемой в качестве входных данных для модели (230) двигателя.
9. Способ по любому из предшествующих пунктов, дополнительно содержащий этапы, на которых
формируют одну из модели (220) конечного автомата, модели (230) двигателя и модели (240) нагрузки с использованием программируемой пользователем вентильной матрицы (FPGA).
10. Способ по любому из предшествующих пунктов, дополнительно содержащий этапы, на которых:
прогнозируют работу новой системы, которая должна быть развернута на объекте (150 A-N) добычи, с использованием модели (200) объекта; и
оптимизируют проектные параметры новой системы на основе спрогнозированной работы.
11. Блок (102, 330) моделирования для управления объектом (150 A-N) добычи, блок (102, 330) моделирования содержит:
программируемую пользователем вентильную матрицу (FPGA); и
память, соединенную с возможностью связи с FPGA, при этом память содержит модуль моделирования, сохраненный в форме машиночитаемых инструкций, исполняемых посредством FPGA, при этом модуль моделирования конфигурируется, чтобы выполнять один или более из этапов способа по пп. 1-10.
12. Система (100) для управления по меньшей мере одним объектом (150 A-N) добычи, система содержит:
одно или более устройств, выполненных для предоставления данных датчиков и вывода данных, ассоциированных с работой по меньшей мере одного объекта (150 A-N) добычи; и
один или более блоков (102, 330) моделирования по п. 11, соединенных с возможностью связи с одним или более устройствами, при этом блоки (102, 330) моделирования конфигурируются, чтобы управлять по меньшей мере одним объектом (150 A-N) добычи.
13. Компьютерно-читаемый носитель, имеющий машиночитаемые инструкции, сохраненные на нем, которые, когда исполняются посредством процессора, побуждают процессор выполнять способ по пп. 1-10.
| US 2015170090 A1, 18.06.2015 | |||
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ШТОКА В СИСТЕМЕ ОТКАЧКИ ФЛЮИДА ИЗ СКВАЖИНЫ | 2005 |
|
RU2381384C1 |
| Чертежный прибор для построения теней на архитектурных проектах | 1950 |
|
SU88167A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ПОГРУЖНОГО ЭЛЕКТРОНАСОСА | 2013 |
|
RU2595828C1 |
| US 2004267395 A1, 30.12.2004 | |||
| VICTOR GUERRERO et al., "A Predictive Current Control Strategy for a Naturally-Commutated Converter Using a Finite-State Machine Model"/International journal of energy, т.11, 2017 г., c.19-26 | |||
| GONZALEZ MARCOS | |||

