Настоящее изобретение относится к индикационному внутритрубному устройству и способу диагностики на основе магнитных, акустических методов и тепловых полей. Предлагаемое устройство предназначено для внутритрубного диагностирования промысловых, межпромысловых, технологических объектов трубопроводного транспорта, перекачивающих неагрессивные жидкости, нефть, нефтепродукты, газ с содержанием сероводорода (H2S) не более 6%.
В связи с ростом объемов строительства и эксплуатации трубопроводов нефтегазового комплекса, наличием большого количества эксплуатационных объектов, выработавших свой ресурс, все большее значение приобретают вопросы диагностики их технического состояния. По данным журнала «Фундаментальные исследования», на территории Российской Федерации в эксплуатации находится 350 тыс. км промысловых трубопроводов, на которых ежегодно отмечается свыше 50 тыс. инцидентов, приводящих к опасным последствиям.
Однако, по разным оценкам, до 40% и более от общей протяженности трубопроводов не предназначено для диагностики технического состояния трубопроводов наиболее популярными методами, например, внутритрубной магнитной и акустической дефектоскопией, и следовательно, такие трубопроводы не имеют камер пуска-приема. Кроме того, серийно выпускаемая аппаратура для реализации этих методов не обеспечивает выявление трещин и других повреждений трубопроводов с определением их износа и остаточной толщины с минимальными затратами и достаточной для практических целей точностью и надежностью. Поэтому использование современных дефектоскопов - толщиномеров, для решения задач выявления дефектов металлургического производства труб, а также систематического контроля их технического состояния и мониторинга зарождающихся повреждений на этапах строительства и эксплуатации трубопроводов, является чрезмерно дорогостоящим и, в ряде случаев, излишне детальным.
Известны различные технические решения в рассматриваемой области.
Достаточно эффективным современным видом аппаратуры для внутритрубной дефектоскопии, выпускаемой в РФ, является дефектоскоп «ВИП» (ВИД 219) (см. ссылку http://www.yamalpro.ru/2014/12/18/neftyaniki-izobretateli-v-noyabrskneftegaze-ispyitali-defektoskop-sobstvennogo-proizvodstva/). Аппаратура «ВИП» имеет ряд конструктивных и эксплуатационных ограничений. В частности, громоздкая конструкция, недостаточная точность при выявлении и оценке толщины стенок труб, ограничения в проведении мониторинга и т.д.
Серийно выпускаемые лидером отечественной внутритрубной дефектоскопии АО «Транснефть-Диаскан», магнитные дефектоскопы серии MCK (MFL) магнитные дефектоскопы серии MCK (TFI), комбинированные магнитные дефектоскопы (MFL+TFI), комбинированные магнитно-ультразвуковые дефектоскопы (MFL+WM+CD), дефектоскопы электромагнитные для выявления отслоений изоляционного покрытия трубопроводов серии ОДП (см. ссылку https://diascan.transneft.ru/klientam/vnytritrybnaya-diagnostika/park-vnytritrybnih-inspekcionnih-priborov/) обеспечивающие ВТД в основном магистральных трубопроводов большого диаметра. Эти приборы непригодны для дефектоскопии линейных и промысловых трубопроводов малого диаметра и не предназначены для решения широкого круга технологических задач (сквозные дефекты, продольные и поперечные дефекты в виде трещин и т.д.).
Кроме того, существующие устройства электромагнитной и магнитометрической дефектоскопии приспособлены для работы на ферромагнитных стальных трубах и не обеспечивают возможность определения технической характеристики дефектов сварных соединений и других дефектов на трубопроводах из пластиковых материалов.
Существенные возможности внутритрубной диагностики реализованы в техническом решении дефектоскоп выпускаемом ЗАО «Аэрокосмический мониторинг и технологии» (http://amt-rus.com/) совместно с компанией Розен Европа. Компания использует для внутритрубной дефектоскопии снаряды-дефектоскопы, разработанные на основе магнитных и ультразвуковых методов неразрушающего контроля, навигационные снаряды, а также снаряды-дефектоскопы с интегрированной технологией электромагнитно-акустического (ЭМА) преобразования.
Дефектоскопы ЗАО «АМТ» предназначены для фиксирования дефектов потери металла, в том числе зон интенсивной коррозии, язв, каверн, продольных и поперечные трещин, дефектов сварных швов в том числе спиральных, смещения кромок, раковин, подрезов, конструктивных особенностей трубопровода в том числе крановых узлов, тройников, отводов, врезок, защитные кожухов и т.д.
Элементами интегрированной технологии электромагнитно-акустического (ЭМА) преобразования является использование акселерометров - гироскопов, регистрирующих движение дефектоскопов по трубопроводу.
Работы проводятся на участках трубопроводов диаметром от 159 до 1420 мм в том числе с круто изогнутыми поворотами и отводами с диаметром 1.5Д (т.е. полтора наружного диаметра трубопровода) на участках с низким рабочим давлением (12-25 Мпа), а также на участках с неравнопроходной трубной арматурой и неравнопроходным диаметром с так называемыми «телескопами». Например, 219/273 мм, 273/325, 325/377…..720-1020 мм.
Основным недостатком снарядов - дефектоскопов является необходимость использования камер - пуска-приема и подготовка технологических участков проведения работ, а также сильное намагничение участков трубопровода, препятствующее мониторингу дефектов и регламентному проведению сварки.
Известны технические решения по патентам РФ №2697007 и №2697008 (14 датчиков).
В патентах РФ №2697007 и №2697008 ряд недостатков технического решения по патенту ЕА №11497 удалось преодолеть.
В известных технических решениях квазиравномерная установка датчиков на сферическом устройстве производится на основе совмещенных геометрических образов октаэдра и куба. Использование этих фигур является одним из наиболее простых и наглядных способов расположения датчиков, близких к равномерному. Куб и октаэдр имеют один общий центр симметрии. Октаэдр имеет 3 оси симметрии, соединяющие его вершины. Куб имеет 4 оси симметрии, представляющие его диагонали и вершины, соединяющие вершины противолежащих параллельных граней. Все 7 осей симметрии пересекаются в центе симметрии. Оси симметрии октаэдра и куба расположены под углом 45 градусов друг к другу. Все оси симметрии выходят на поверхность сферы.
Поскольку осей симметрии 7 и на каждой оси расположены два соосных датчика, то всего имеем 14 датчиков на поверхности сферы, описывающей комбинацию этих фигур.
Таким образом, в патентах РФ №2697007 и №2697008 используется совокупность однокомпонентных датчиков, квазиравномерно расположенных на оболочке сферического устройства, при этом вероятность встречи одним из датчиков дефекта по сравнению с патентом ЕА №11497 существенно увеличивается.
Кроме того, датчики на оболочке сферического устройства расположены таким образом, что каждому датчику соответствует симметрично расположенный относительно геометрического центра устройства другой датчик. Оси датчиков проходят через центр симметрии. Используя величины компонент поля от соосных датчиков, получают градиенты поля во внутреннем объеме трубопровода, что облегчает при обработке выявлять дефекты по аномалиям градиентов.
Но, несмотря на это, известные решения по патентам РФ №2697007 и №2697008 имеют значительное количество недостатков, а именно:
- недостаточная плотность расположения датчиков на сферической оболочке, что создает вероятность пропуска дефектов стенки трубопровода при перемещении устройства в трубной полости или уменьшает эту вероятность;
- зависимость получаемых параметров магнитного поля, в том числе зависимость его аномальных значений без проведения необходимой коррекции от положения устройства во внутритрубном пространстве, что затрудняет интерпретацию измерений или делает ее ошибочной;
- отсутствие возможности точного измерения параметров магнитного поля, независимых от поворотов устройства регистрации поля при его перемещении во внутритрубном пространстве;
- существенные погрешности измерений направлений векторов напряженности магнитного поля при изменении направления трубопровода в том числе резких изменений (до 1.5Д, т.е. полтора наружного диаметра трубопровода) вследствие затруднений получения инвариантных параметров;
- отсутствие возможности совместного использования инвариантных и неинвариантных параметров поля для контроля правильности получения геометрических и магнитных параметров дефектов;
- отсутствие возможности проводить сканирования магнитного поля в трубной полости вследствие невозможности получения плоскостей симметрии магнитного поля, ортогональных простиранию трубопровода;
- особенности конструкции предполагают низкую вероятность выявления поперечных сварных швов, вероятность их пропуска, а также низкую вероятность выявления дефектов сварных швов;
- конструкция расположения датчиков не обеспечивает возможность получения контролируемых плоскостей симметрии, в том числе ортогональных простиранию трубопровода, и не дает возможность изучения внутреннего поля трубопровода, близкой к методике сканирования;
Известны также Устройство и Способ внутритрубной диагностики технического состояния стальных трубопроводов, реализованные в патенте РФ №2722636. Данный патент принят в качестве прототипа
Устройство внутритрубной диагностики технического состояния трубопровода выполнено с возможностью перемещения внутри трубопровода и включающее корпус, внутри которого установлены: группы датчиков магнитного поля, каждая группа датчиков магнитного поля включает по меньшей мере два датчика, расположенных на одном радиальном луче, имеющем начало в центре корпуса, с обеспечением со направленности осей чувствительности датчиков.
Недостатком прототипа является то, что корпус устройства может быть выполнен в форме эллипсоида и цилиндра. Но отсутствие центральной симметрии устройства в случае использования цилиндра не позволяет использовать при расположении датчиков вписанный икосаэдр. Следовательно, в случае использования цилиндра не удается получать одинаковое расстояние между датчиками, одинаковое удаление датчиков от центра сферы, а также обеспечить равномерное расположение датчиков по поверхности корпуса устройства.
Существенными недостатками данной конструкции устройства и работы известным способом внутритрубной диагностики технического состояния стального трубопровода являются также:
- зависимость получаемых параметров магнитного поля, в том числе зависимость его аномальных значений во внутритрубном пространстве от положения сферического устройства, что без проведения необходимой коррекции положения устройства затрудняет интерпретацию измерений или делает ее ошибочной;
- отсутствие возможности точного измерения параметров магнитного поля при его регистрации поля, независимых от поворотов устройства в процессе перемещении его во внутритрубном пространстве;
- существенные погрешности измерений направлений векторов напряженности магнитного поля при изменении направления трубопровода в том числе резких изменений (до 1.5. Д т.е. полтора наружного диаметра трубопровода) вследствие затруднений получения инвариантных параметров;
- отсутствие возможности комплексного использования инвариантных и неинвариантных параметров поля для контроля правильности получения геометрических и магнитных параметров дефектов;
- невозможность проводить сканирования магнитного поля во внутренней полости трубопровода вследствие невозможности получения плоскостей симметрии магнитного поля, ортогональных простиранию трубопровода;
- конструкция расположения датчиков не обеспечивает возможность получения контролируемых плоскостей симметрии, в том числе ортогональных простиранию трубопровода, и не дает возможность изучения внутреннего поля трубопровода, близкой к методике сканирования;
Таким образом технической проблемой, которая решается в данном изобретении, является разработка наиболее универсального и простого в использовании способа и устройства технической диагностики трубопровода, которые бы позволили значительно повысить точность и надежность определения дефектов трубопровода.
Основными преимуществами предлагаемого технического решения являются:
- возможность измерения параметров поля, независимых от положения устройства в системе координат (X, У, Z), направление которых определяется геометрией трубопровода вблизи дефекта, и возможность получения в этом случае инвариантов поля;
- возможность одновременного получения модулей (инвариантов) поля, а также градиентов нормальных компонент, совместное использование которых повышает надежность данных диагностики дефектов;
- возможность проведения внутритрубной дефектоскопии на коротких отрезках промысловых и транспортных трубопроводов, а также на участках с большим количеством поворотов и изгибов;
- возможность проведения дефектоскопии на участках трубопровода, не оборудованных камерами пуска-приема;
-возможность использования универсального устройства, приспособленного для работы как на стальных, так и трубах из пластика;
- сокращение стоимости внутритрубной диагностики за счет сокращения количества используемых внутритрубных интроскопов и дефектоскопов, сокращения объема подготовительных операций и количества обслуживающего персонала;
- повышение точности и надежности определения дефектов и оценки их геометрических параметров, определения конструктивных и ремонтных особенностей трубопроводов, выявления и оценки разрушающихся поперечных и продольных сварных швов.
Техническим результатом использования внутритрубного устройства является повышение точности и надежности обнаружения и оценки опасности дефектов, местоположения и геометрических размеров дефекта, в том числе, зон коррозии, обнаружение и распознавание аномалий поперечных сварных швов, в том числе разрушающихся сварных швов, обнаружение и определение местоположения трубопроводной арматуры и фитингов, ремонтных конструкций трубопровода, причем появляется возможность применения предлагаемого устройства на ферримагнитных и пластиковых трубах, возможность проведения внутритрубной диагностики на коротких отрезках промысловых и транспортных трубопроводов, а также на участках с большим количеством поворотов и изгибов; возможность проведения дефектоскопии на участках трубопровода, не оборудованных камерами пуска-приема;
возможность одновременного получения модулей (инвариантов) поля и градиентов нормальных компонент, совместное использование которых повышает надежность данных диагностики дефектов.
Технический результат достигается за счет того, что в устройстве внутритрубной диагностики технического состояния трубопровода, выполненном с возможностью перемещения внутри трубопровода под давлением транспортируемой по трубопроводу жидкости и включающем разъемный корпус сферической формы с размещенными внутри него трехкомпонентными датчиками магнитного поля, датчиками температуры, акселерометрами, датчиком акустической эмиссии в звуковой и сверхзвуковой областях частот и устройством записи данных, измеренных датчиками, отличающееся тем, что трехкомпонентные датчики магнитного поля установлены в виде модулей, каждый модуль включает в себя по три однокомпонентных датчика, причем эти модули расположены в 12 точках пересечения сферы с соосными вершинами вписанного в нее виртуального икосаэдра, а также в 20 точках пересечения сферы с радиальными лучами, проходящими через центр сферы и центры параллельных граней вписанного виртуального икосаэдра, при этом ось первого из датчиков постоянного магнитного поля в каждом модуле датчиков ортогональна поверхности сферы, тогда как оси остальных двух датчиков одного модуля взаимно ортогональны и ортогональны оси первого датчика.
Дополнительными отличиями предлагаемого внутритрубного устройства являются:
- устройство состоит из первого корпуса, на котором установлены датчики с электронными узлами, помещающийся во второй жесткий силовой корпус;
- устройство имеет внешнюю защитную мягкую герметичную оболочку из полиуретанового слоистого материала (покрытия);
- устройство имеет совпадающий геометрический центр, центр тяжести и центр симметрии вписанного виртуального икосаэдра;
- в качестве трехкомпонентных датчиков постоянного магнитного поля используют феррозондовые или магниторезистивные датчики, или датчики туннельные магниторезистивные, датчики анизотропные магниторезистивные;
- в качестве феррозондовых датчиков используют высокоточные интегральные феррозонды магнитного поля;
- используют датчик акустической эмиссии имеет резонансною частоту в диапазоне звуковой и сверхзвуковой областях частот от 0,1 кГц до 180 кГц;
- устройство записи данных включает беспроводное зарядное устройство и микропроцессор, соединенный с мультиплексорами через аналого-цифровые преобразователи, с запоминающим устройством микро SD-картой и модулем Bluetooth через интерфейс UART;
- устройство для обеспечения привязки наблюдений к наземным маркерам содержит во внутреннем корпусе устройства приемник и передатчик, обеспечивающие прием и генерацию низкочастотного сигнала;
- генерация низкочастотного сигнала производится по огибающей колоколообразного сигнала с заполнением синусоидой около 20 Гц;
- в качестве запоминающего устройства используют микро SD-карту;
- в качестве запоминающего устройства используют Flash-память;
- для оцифровки данных с 96-ти аналоговых каналов используется 16-разрядное АЦП;
- устройство содержит плату оцифровки содержащее часы реального времени, соединенные с микроконтроллером.
Технический результат достигается также за счет того, что в способе внутритрубной диагностики технического состояния трубопровода, содержащего транспортируемую по нему жидкость, обеспечивающую перемещение внутри трубопровода под давлением жидкости и газа, транспортируемого по трубопроводу, устройства по п. 1, измерение этим устройством характеристик магнитного поля внутри трубопровода и вычисление на основе полученных данных диагностических параметров трубопровода, предлагается в качестве характеристик магнитного поля измерять не менее 96 компонент магнитной индукции внутреннего поля трубопровода и вычислять на основе измеренных компонент магнитной индукции внутреннего поля трубопровода диагностические взаимно контролируемые параметры трубопровода (32 компоненты магнитной индукции магнитного поля и 16 градиентов компонент магнитной индукции этого поля, 32 модуля (инварианта) магнитного поля и 16 градиентов этих инвариантов внутритрубного магнитного поля трубопровода).
Дополнительными отличиями способа являются:
- получение 32 модулей (инвариантов) магнитного поля в различных симметрично и равномерно расположенных точках внутритрубного пространства и 16 градиентов этих инвариантов;
- получение не менее 32 нормальных (ортогональных поверхностей сферы) компонент магнитной индукции этого поля, установленных в различных симметрично и равномерно расположенных точках внутритрубного пространства;
- получение не менее 16 градиентов нормальных компонент магнитной индукции этого поля.
Также в дополнительные отличия способа входят следующие этапы работ:
- перед началом измерений проводят итеративную высокоточную калибровку устройства;
- перед началом проведения итеративной высокоточной калибровки устройства проводят чистку трубопровода с использованием очистных шаров с различными диаметрами;
- измеряют параметры поля акустической эмиссии, температуры теплового поля и давления транспортируемой жидкости в различных точках внутритрубного пространства;
- чистка трубопровода прекращается при достижении беспрепятственного прохождения очистного шара с диаметром соответствующего размеру диаметра измерительного устройства;
Таким образом при осуществлении предлагаемого способа получаем 32 модуля (инварианта) сигналов, фиксирующих внутритрубное магнитное поле независимо от знаков компонентных векторов поля и поворотов устройства, в точках, максимально приближенных к дефектам трубопровода, что позволяет оценить максимальный вынос металла и опасность выявленного дефекта без искажений измеряемых сигналов.
Одновременно использование модулей сигналов на участках без дефектов, позволяет оценить среднестатистический уровень помех раз личного происхождения.
Совместное использование градиентов инвариантов и градиентов нормальных компонент, позволяет при условии предварительной фильтрации надежно выявить дефекты в стенках трубопровода и поперечные сварные швы, уточнить геометрические и магнитные параметры дефектов.
Сущность предлагаемого технического решения поясняется следующими фигурами:
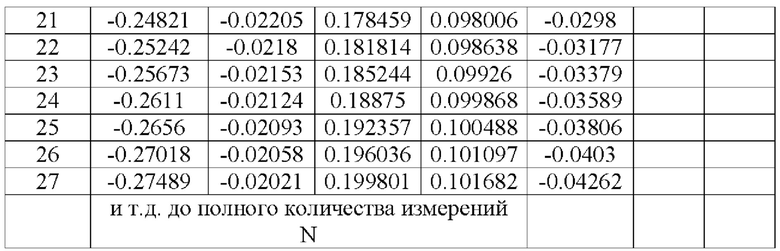
Фиг. 1. на которой показано расположение центров 10-ти видимых граней икосаэдра, 10-ти невидимых граней икосаэдра, вершин икосаэдра и плоскости симметрии в аксонометрии, где используются следующие обозначения:

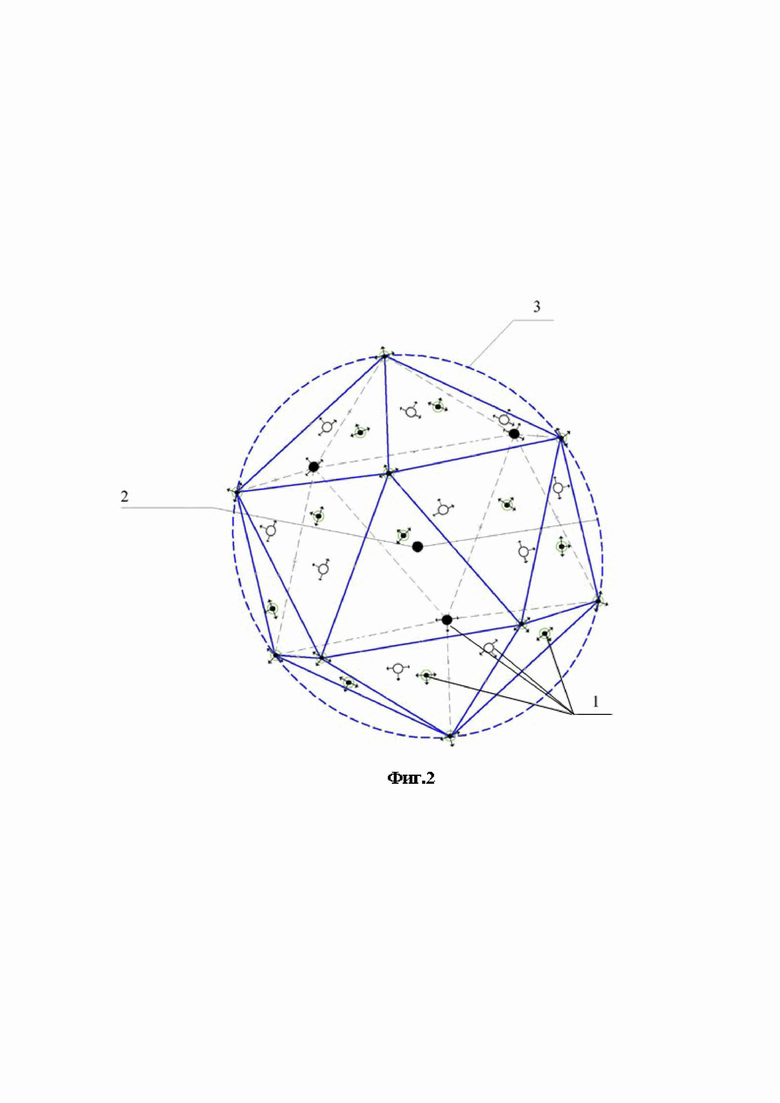
Фиг. 2, на которой показано расположение групп датчиков на поверхности сферы, где 1 - модули датчиков, 2 - центр сферы, 3 - оболочка сферы, а также используются следующие обозначения:
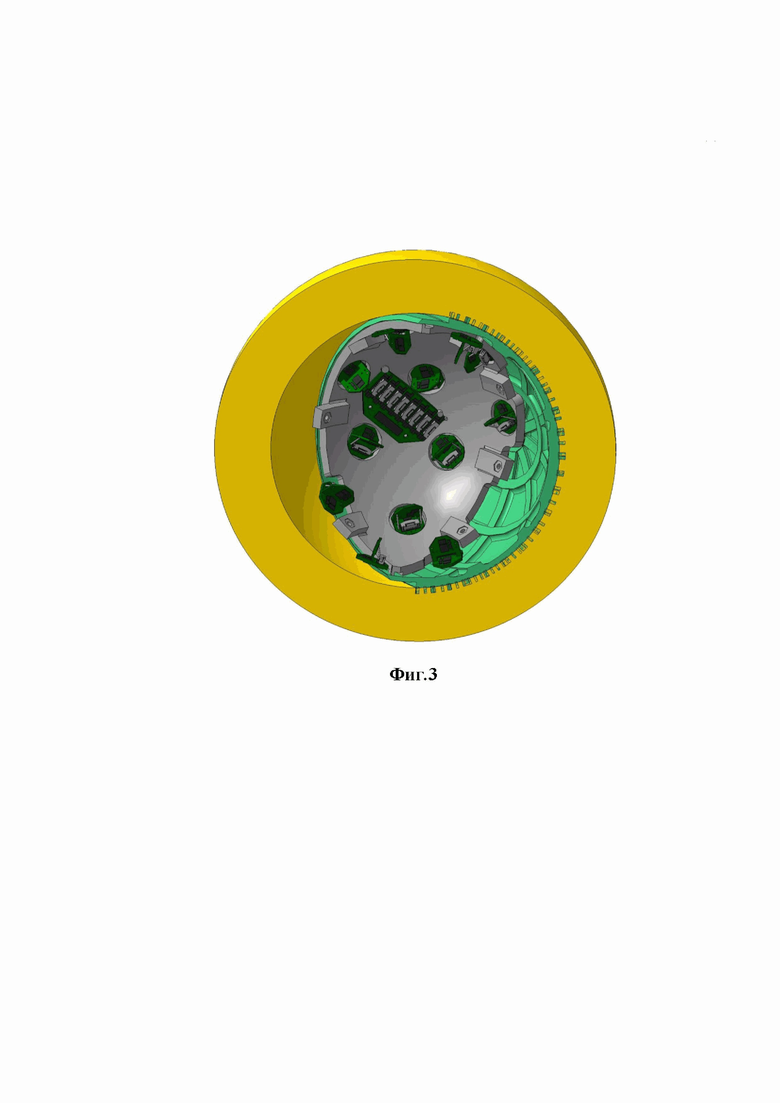
Фиг. 3, на которой изображен общий вид конструкции устройства в разрезе.
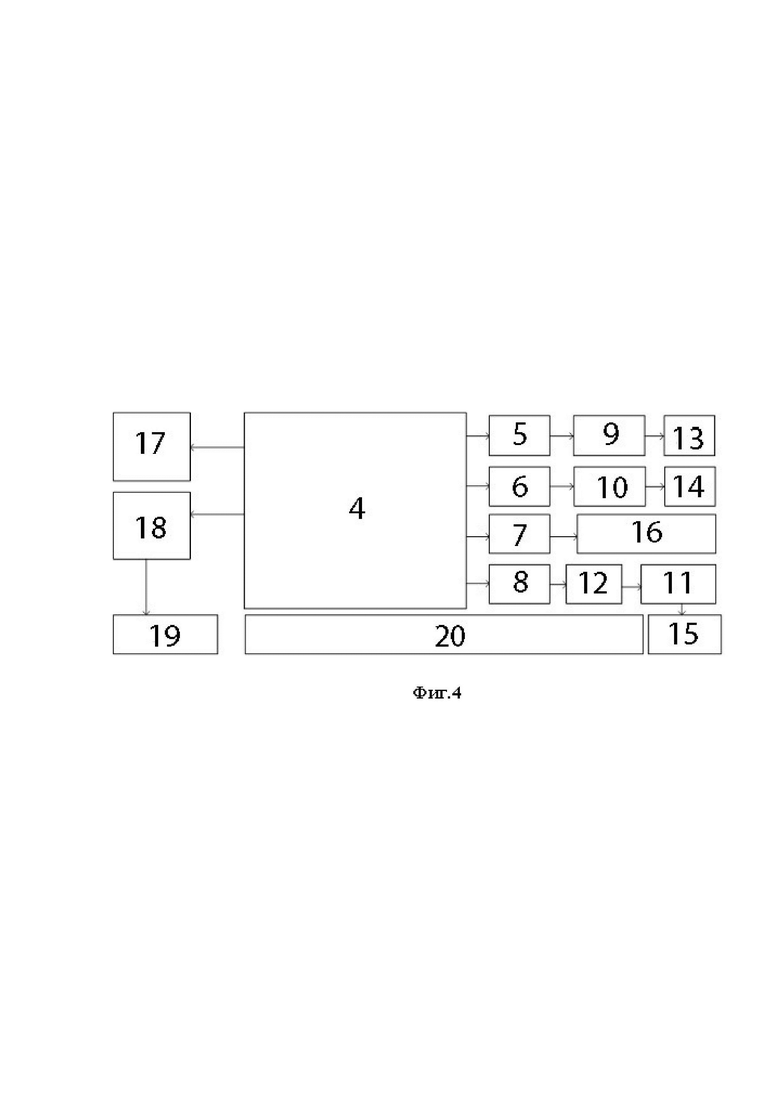
Фиг. 4, на которой приведена функциональная схема опытного образца устройства, где: 4 - микроконтроллер, 5 - канал АЦП 1 (16 бит), 6 - канал АЦП
2 (16 бит), 7 - канал АЦП 3…..25 (12 бит), 8 - интерфейс SPI,
9 - мультиплексор 1,10- мультиплексор 2, 11 - мультиплексор 3,
12 - внешний АЦП (16 бит), 13 - магнитные датчики 1……16,
14- магнитные датчики 16……32, 15 - прочие магнитные датчики,
16 - датчики давления, температуры, акустические, акселерометр, прочие,
17 - micro SD, 18 - интерфейс Serial/UART, 19 - Bluetooth, 20 - аккумулятор.
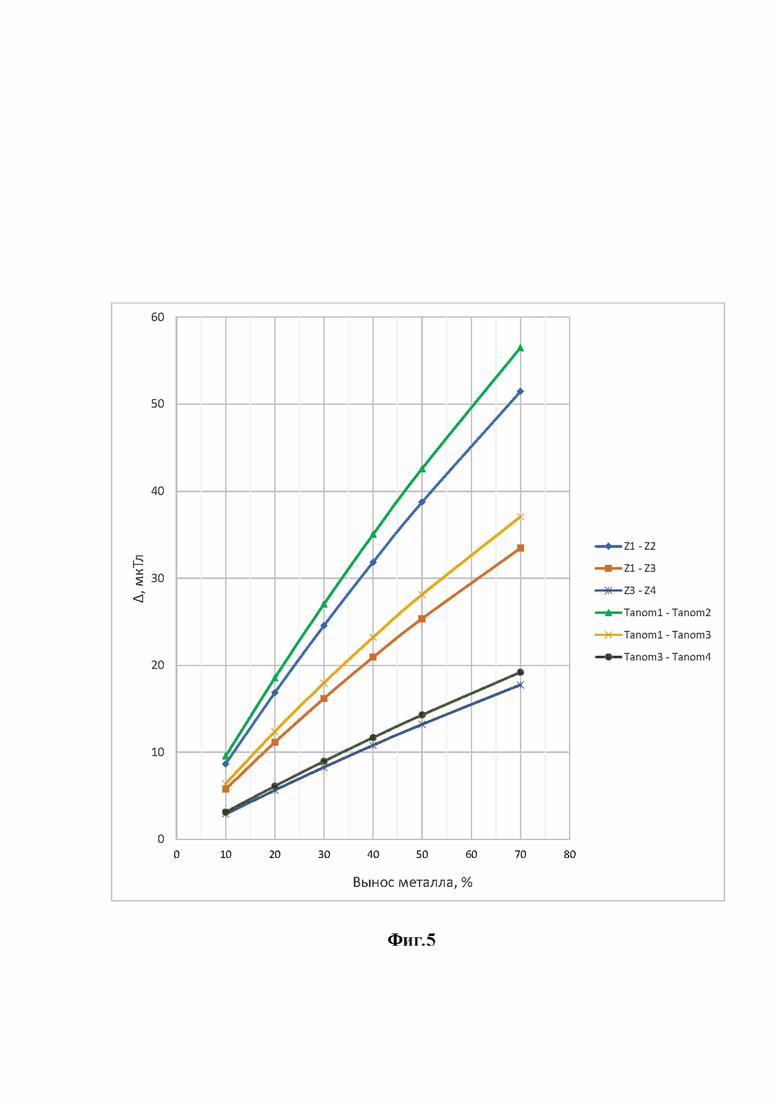
Фиг. 5, на которой изображена зависимость разностей компонент и модулей от выноса металла на трубопроводе диаметром 219 мм.
Конструкция устройства обеспечивает его проход по трубопроводу, например, с внешним диаметром 219 мм. Условиями определения местоположения дефекта и нормального функционирования датчиков в рассматриваемом устройстве является их равномерное расположение на поверхности сферы. Равномерное расположение датчиков подразумевает их равноудаленность друг от друга. Равномерное распределение датчиков обеспечивает с оптимальной точностью решение задач по выявлению дефектов, точного определения их геометрических параметров, выделение и характеристика сварных швов. На этапе обработки и интерпретации равномерность положения датчиков обеспечивает проведение градиентного и корреляционного анализа, вычисления инвариантов поля и возможность автоматизации при решении задач дефектоскопии с использованием устройства.
Условиями распределения датчиков является также легкое определение их положения по номеру, а также наличие и номер датчика, симметрично расположенного относительно цента симметрии. Для обоснования такой возможности использована теория правильных выпуклых многогранников, (например, М. Винниднер, Модели многогранников. 1974, М, 236 с).
Наиболее удобной формой, на основании которой размещают датчики на поверхности сферы, является форма икосаэдра по следующим причинам:
1. Икосаэдр имеет 16, пересекающихся в центре осей симметрии, каждая из которых проходит через центры граней и вершины икосаэдра. Вокруг икосаэдра легко описывается шар, проходящий через вершины и имеющий площадь S=5a2*√3 и радиус описанной окружности Roп=a√(2(5+√5))/4, где а - длина ребра вписанного икосаэдра.
2. Если оси симметрии, проходящие через центры параллельных граней, продолжить до пересечения с описанным шаром, то получим точки пересечения 10-ти осей симметрии с оболочкой шара. Эти точки пересечения, а также вершины икосаэдра являются возможными местами установки датчиков. Этих точек пересечения для икосаэдра будет 20 в соответствии с количеством граней.
3. Количество осей икосаэдров, проходящих через вершины икосаэдра (12) и центр симметрии равно шести (12/2=6).
При использовании 32 компонентных датчиков, расположенных по нормали к оболочке сферы, вероятность встречи дефекта одним из этих датчиков существенно увеличивается. Кроме того, эти датчики («компонентные») расположены на оболочке сферического устройства таким образом, что каждому трехосному датчику соответствует другой, симметрично расположенный относительно геометрического центра устройства, что обеспечивает получение 16 градиентов нормальных компонент. Остальные 64 датчика расположены попарно и ортогонально «компонентным» и обеспечивают совместно с «компонентными» получение 32 инвариантов поля и, 16 градиентов инвариантов.
Таким образом, использование всех 96 датчиков обеспечивает 32 модуля (инварианта) магнитного поля в различных симметрично и равномерно расположенных точках внутритрубного пространства и 16 градиентов этих инвариантов, 32 нормальных (ортогональных поверхностей сферы) компонент магнитной индукции этого поля и 16 градиентов нормальных компонент магнитной индукции этого поля, независимых от положения устройства и от выбранной системы координат.
Расположение датчиков обеспечивает получение контролируемых плоскостей симметрии и выделение плоскостей, ортогональных простиранию трубопровода, и таким образом, осуществляет аналог сканирования внутренней поверхности трубопровода
Используя величины компонент поля от соосных датчиков, получают максимальные и минимальные градиенты компонент и градиенты модулей поля во внутреннем объеме трубопровода, что позволяет выявить дефекты по аномалиям градиентов. Дефекты могут быть также выделены по различию (разности или отношению) компонентов магнитного поля трубопровода или асимметрии их амплитудных значений.
Таким образом, полученные в результате обработки данные позволяют уточнить местоположение дефекта.
Конструктивно устройство выполнено следующим образом.
Корпус (фиг 3) представляет собой две части полусферы, соединенные через осевой узел. Корпус имеет технологическое отверстие для подсоединения кабеля к внутренней электронике с функцией настройки, закрытое заглушкой. Крепление двух частей полусфер осуществляется с помощью оси и трех потайных винтов, закрученных в закладные гайки. Для установки компонентов предусмотрены стойки для установки плат оцифровки, боковые карманы для установки аккумуляторов и направляющие для установки измерительных датчиков. Крепление плат осуществляется с помощью шпилек и гаек. Для исключения влияния на сигналы магнитных датчиков намагниченности сторонних деталей корпус выполнен из ABS-пластика, а весь крепеж выполнен из латуни, то есть практически вся конструкция устройства выполнена из немагнитных материалов.
Датчики закреплены на рельсах, такая конструкция позволяет менять положение датчиков относительно центра начального положения до стенки корпуса сферы и перемещать на различное расстояние до стенок измеряемой трубы, с целью калибровки и юстировки датчиков. Таким образом, при измерении учитывалась достаточно толстая полиуретановая оболочка на изделии при изготовлении корпуса устройства.
Корпус устройства спроектирован так, чтобы предусмотреть равномерное размещение 32 датчиков на наружной поверхности сферы. Кроме магнитных датчиков, в корпусе предусматриваются стойки для модуля с аналоговым акселерометром. Магнитные датчики и датчик ускорения калибруются и проверяются в однородном поле
Расположение магнитных феррозондовых датчиков показано на фиг 2.
Устройство предназначено для сбора данных с аналоговых измерительных каналов и записи их на micro SD-карту памяти или просмотра в режиме реального времени на компьютере.
Функциональная схема устройства приведена на Фиг. 4.
Устройство имеет два режима работы - режим записи собранных данных на карту памяти и режим передачи данных по USB. Передача данных идет в пакетном режиме.
В качестве микроконтроллера 1 в устройстве используется мощный 32-разрядный микроконтроллер фирмы Microchip (Atmel) - ATSAMD21G18 с вычислительном ядром ARM Cortex® МО. Благодаря использованию 32-разрядного ядра ARM, Arduino МО во многом превосходит типичные платы на базе 8-разрядных микроконтроллеров. Наиболее существенные особенности микроконтроллера заключаются в следующем:
- 32-битное ядро позволяет обрабатывать 4х-байтовые данные всего за один такт.
- Тактовая частота - 48 МГц.
- Объем флэш-памяти программ - 256 КБ.
- Объем оперативной памяти SRAM - 32 КБ.
В контроллер встроен 12-разрядный АЦП, который используется в устройстве для оцифровки данных. АЦП имеет 6 каналов, которые используются следующим образом:
- канал 1 - мультиплексируется на 16 аналоговых каналов, куда подключаются 15 TMR-датчиков магнитного поля и одометр (датчик линии);
- каналы 2, 3, 4 - выходные сигналы акселерометра ADXL335;
- канал 5 - измерение напряжения на аккумуляторах;
- канал 6 - датчик акустической эмиссии.
Цикл опроса сбора данных составляет 500 мкс, интервал между опросами мультиплексируемых каналов составляет не более 2 мкс.
Для записи информации используется micro SD карта памяти SanDisk Ultra объемом 32 Гб, поддерживающая скорость записи до 80 МБ/с.
На каждом цикле МК (микроконтроллер) проверяет наличие байт на входном UART и, в зависимости от поступающей через модуль Bluetooth 16 команды от ведущего устройства, или осуществляет для ведущего устройства интерфейс работы с картой памяти, или переводит МК в спящий режим, или запускает измерения с сохранением результатов на micro SD-карту 14 или в UART Bluetooth-модуле 16. Опытным путем было выяснено, что для корректных магнитных измерений требуется АЦП с разрешением не менее 16 бит. Данные с магнитных датчиков DRV425 разделяются по времени аналоговым мультиплексором, интервал времени между измерениями соседних датчиков не превышает 50 мкс.
В устройстве использованы датчики, мало чувствительные к действию сильного внешнего магнитного поля, и в то же время обладающие статической погрешностью, не превышающей 100 нТл и диапазоном шире +/- 180 мкТл (данные взяты исходя из стендовых испытаний). Таким требованиям отвечают магнитомодуляционные датчики с сильной обратной связью - феррозонды. Так как устройство имеет малые габариты, используются малогабаритные феррозонды DRV425 от Texas Instruments, реализованные на кристалле в составе единой микросхемы.
Датчик предназначен для измерения одной составляющей постоянного магнитного поля. Небольшой уровень смещения, низкий его дрейф, низкий шум датчика в сочетании с прецизионным усилением, низким дрейфом усиления и очень низкой нелинейностью, благодаря внутренней компенсационной катушке, приводят к приемлемой точности измерений магнитного поля. На выходе датчик выдает аналоговый сигнал, пропорциональный величине магнитного поля. В структуре DRV425 имеется дифференциальный усилитель и встроенный прецизионный источник опорного напряжения, равного половине напряжения питания. Используемая реализация DRV425 размещена в немагнитном корпусе WQFN размером 4x4 мм с рассеивателем PowerPad для оптимизации рассеивания тепла. Датчик работает в расширенном индустриальном температурном диапазоне -40°С…+125°С. Высокая чувствительность датчика DRV425 от Texas Instalments при измерении градиентов реализуется благодаря особенности конструкции. Датчик имеет одну ось легкого намагничивания и содержит микроферрозонд на кристалле, усилитель и формирователь средней точки катушки компенсации феррозонда.
Успешность внутритрубной записи в устройстве обеспечивают следующие элементы методики:
- калибровка магнитоизмерительной системы устройства - проверка перед записью внутренних узлов, подключенности датчиков, состояния аккумулятора и т.д.;
- возможность получить статус работы устройства и измерительные данные в режиме реального времени;
- возможность привязки записи устройства к мировому времени и к географическим координатам начала трубы, конца трубы и маркеров позиционирования;
- возможность синхронизации запуска и остановки записи на карту памяти с пуском/остановкой прибора давлением продукта;
- возможность выгрузки данных из карты памяти на компьютер и работы с файловой системой карты памяти на компьютере.
Устройство обладает внешним программным обеспечением для установки на компьютер или мобильное устройство. Для выполнения требований по стойкости к внешнему давлению и влагозащищенности сферический корпус помещен в полимерную сжимаемую оболочку, при этом устройство выполняет требования герметичности. Поэтому в устройстве осуществляется передача данных (измерительной информации) от компьютера/мобильного устройства в устройство и обратно беспроводным образом с помощью беспроводных интерфейсов Bluetooth.
Так как рассматриваемое устройство является автономной системой, удобно подключать его к компьютеру/мобильному устройству в режиме Slave (ведомое устройство), при этом компьютер является ведущим устройством (Master). Ведущее устройство отправляет команды ведомому, или отправляет в ответ некие данные или изменяет свое состояние. Поэтому все возможные состояния устройства пронумерованы, а команда от ведущего устройства обеспечивает переход устройства в различные функциональные состояния. При этом ведомое устройство непрерывно сканирует эфир и в случае наличия байт на входе в UART МК, выполняет команду, а в случае их отсутствия -продолжает измерения. Схема взаимодействия компьютера/мобильного устройства с устройством производится посредством Bluetooth. В качестве модуля Bluetooth был выбран чип ВС417.
Плата оцифровки содержит часы реального времени, интегрированные в микросхеме DS 3232MZ+ и батарейку для этой микросхемы. Опрос часов реального времени производится контроллером по протоколу I2C после включения питания контроллера. Это необходимо для привязки файлов записи к мировому времени. Также микросхема DS 3232MZ+содержит датчик температуры.
Таким образом, предложенная схема позволяет регистрировать значения необходимых физических полей, производить их вывод на карту памяти или через USB и осуществлять привязку данных к мировому времени.
Особенности структуры устройства позволяют получать 16 плоскостей симметрии. В каждой плоскости симметрии находятся 4 грани и 4 вершины икосаэдра.
Электронная схема устройства позволяет получать сумму и разность измеренных значений для каждой миллисекунды. Таким образом исходными данными для первичной обработки и дальнейшей интерпретации являются показания 96 датчиков магнитного поля, расположенных на наружной поверхности шара диаметром 135 мм (для трубопровода с наружным диаметром 219 мм).
Перед проведением диагностики проводится очистка и калибровка контролируемого участка трубопровода подбираемыми по диаметру полиуретановыми шарами (очистными шарами).
Производится перекрытие участка трубопровода, расположенного выше и ниже контролируемого участка.
В пределах контролируемого участка очистной шар опускается в камеру пуска, а в камере приема устанавливается приемное устройство (сетка).
Открываются камеры пуска/приема, расположенные выше и ниже контролируемого участка. Очистной шар переносится транспортирующей жидкостью, ловится и поднимается на поверхность с помощью приемного устройства.
После успешного приема очистного шара производится подготовка к диагностике внутритрубного устройства. Производится пуск и прием измерительного устройства.
В процессе перемещения измерительного устройства производится измерение не менее 96 компонент магнитной индукции внутреннего поля трубопровода и вычисление 32 модулей (инвариантов) магнитного поля в различных симметрично и равномерно расположенных точках внутритрубного пространства и 16 градиентов этих инвариантов, углов поворота и дорожек ускорения, сигналов аномальной акустической эмиссии и зон тепловых или химических аномалий на SD карту.
Результаты измерений записываются в энергонезависимую память и служат для оценки зон утонения и коррозии, зон дефектов по длине трубопровода, оценки расположения, технического состояния сварных швов и диаметров сквозных отверстий.
По окончании прогона зарегистрированная в памяти датчиков информация прогона переписывается с помощью внешнего устройства (терминала) на внешние носители информации для последующей интерпретации полученных данных, с целью оценки размеров и местоположения дефектов, а также опасности их эксплуатации и оценки конструктивных особенностей трубопровода.
В процессе перемещения измерительного модуля производится запись модулей (инвариантов) и градиентов инвариантов магнитного поля, углов поворота и дорожек ускорения, сигналов аномальной акустической эмиссии и зон тепловых или химических аномалий на SD карту.
Запись сигнала датчиков производится на портативный носитель любого из существующих в настоящее время типов (Flash - память, SD - карта и т.д.).
При включении устройства происходит запись сигнала. Аналогично производится прием сигналов команды окончания записи. Таким образом устройство производит следующие действия:
- сбор данных с магнитометрической системы;
- сбор данных с акустической системы;
- сбор данных о температуре;
- сбор данных с акселерометра;
- оцифровка измеренных данных;
- обеспечение равномерности сбора данных во времени;
- коррекция измеренных данных для уменьшения инструментальной и метрологической погрешностей;
- сохранение измеренных данных на электронном носителе.
Выходными данными, поступающими с датчиков, являются полусумма значений измеренного поля соосных датчиков (средние значения) и их полуразность (градиенты). Для получения значений магнитного поля для одного датчика, к среднему значению поля прибавляется половина градиента, для второго соосного датчика необходимо отнять половину градиента.

Нср - полусумма, измеренная магнитометром, dH - полуразность, измеренная магнитометром.
H1 Н2 - амплитудные значения магнитного поля
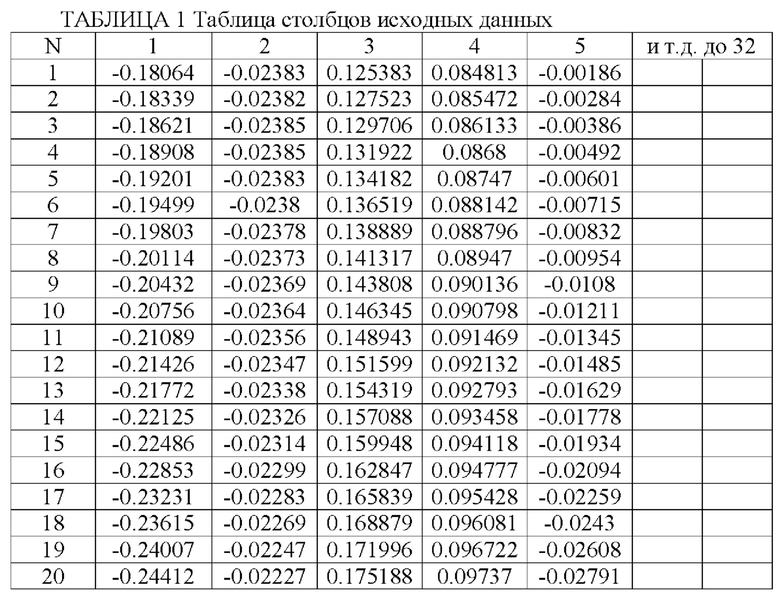
Измерения и вычисления проводятся для каждой миллисекунды, таким образом, формируется таблица исходных данных, в которой количество 32-х столбцов соответствует количеству групп датчиков из 96 каналов (каждый со своим порядковым номером), а количество строк равно количеству измерений (N). Зная длину профиля в метрах можно определить шаг съемки (dY), разделив длину на количество отсчетов. В таблице 1 показан фрагмент такой таблицы исходных вычисленных данных.
В связи с тем, что датчики дают показания каждую миллисекунду, количество полученных данных (N) может быть излишне большим, а шаг измерений (dY) излишне мелким. Как известно из теории интерпретации магнитных полей, для уверенного обнаружения аномалии, вызванной возмущающим объектом, достаточно 5-7 измерений, а для решения обратной задачи достаточно 15-20 измерений на одну аномалию. С целью получения оптимального количества точек для обнаружения аномалии поля от дефекта в алгоритме предусмотрена операция децимации, то есть прорежения исходных отсчетов. Шаг децимации, то есть точек, которые необходимо пропустить (d), можно задавать в окне программы в интерактивном режиме, значение может варьироваться от 2 до половины количества измерений.
Пример децимации с шагом 10.
H(i)=H((i-1)*10+1), i=от 1 до полного количества точек N. При этом шаг съемки (dY) увеличивается в 10 раз. Значения поля, полученные в результате децимации, формируют новую таблицу исходных данных с количеством столбцов соответствующих 32-м датчиков, и с количеством строк N=N/d, для данного примера (d=10) N=N/10.
Целью измерений внутри трубы является обнаружение повреждений целостности трубы (дефектов) по измеренному магнитному полю. Повреждения трубы (дефекты) вызывают аномальные значения в измеренном поле. В случае недостатка магнитной массы (выбоины, царапины, ручейковая коррозия и др.) и расположения дефекта в нижней половине трубы аномалии будут иметь отрицательный знак. При приближении датчика к дефекту величина абсолютного значения поля растет и достигает максимума на минимальном расстоянии.
Для обнаружения местоположения дефекта необходимо найти максимальное значение модуля поля среди всех 32-х групп датчиков в каждой точке измерений. Таким образом, в таблице 1 исходных данных для каждой строки находится максимальное значение модуля поля.
Hmax=Н(1)
если Н(1) меньше, чем Н(2), то Hmax=Н(2)
далее сравнивается Н(2) и Н(3)
если Н(2) меньше, чем Н(3), то Hmax=Н(3)
и т.д. для 32 датчиков, максимальное значение фиксируется.
Производим аналогичные вычисления для следующей строки и потом для всех отсчетов прибора N, то есть для всех строк таблицы 1. Из полученных максимальных значений формируется массив максимальных значений в каждой строке. Из полученных данных выбираются значения с минимальным отличием от максимального значения в каждой строчке и между строчками в пределах выбранного интервала времени Таким образом, определяется плоскость симметрии ортогональная простиранию трубопровода. Совокупность полученных таким образом плоскостей, ортогональных простиранию трубы, позволяет проводить сканирование стенок трубы с выделением экстремумов поля на дефектах. Выбор значительных экстремальных значений магнитного поля различий на ортогональной плоскости симметрии более чем в 3 раза (или 3 сигмы) будет означать, что в этой зоне расположен дефектный участок.
Если в процессе выбора экстремальных значений поля различий на ортогональной плоскости симметрии не обнаруживается, т.е. разность сигналов между 8 или 10 датчиками незначительна, а уровень сигналов превышает внутритрубный фон естественного магнитного поля на участках трубопровода и не являющихся дефектными участками, у которых уровень магнитного поля не менее, чем 3 сигма, то эта зона может быть отнесена к зоне дефектного сварного шва.
Датчики расположены таким образом, что образуют 16 соосных пар групп датчиков на геометрически правильной сетке с равными расстояниями друг от друга.
Дефекты могут быть также выделены по различию (разности или отношению) компонентов магнитного поля трубопровода или асимметрии их амплитудных значений. В случае квазиравномерного расположения однокомпонентных датчиков постоянного магнитного поля на оболочке сферического устройства можно получить не менее 32 одноосных величин компонент, ориентированных к центру сферы, H1, Н2, Н3, …Н30, Н31, Н32.
Кроме того, используя данные акселерометра и проведя интегрирование данных ускорения d2S/d2T, можно получить данные скорости V=dS/dT и в случае необходимости, произвести коррекцию пройденного пути S, и, соответственно, данных компонент магнитного поля.
Использование градиентов позволяет уточнить местоположение дефекта, т.к. местоположение градиента не зависит от положения устройства относительно дефекта трубопровода. В результате обработки полученные данные являются аналоговой достоверной аномалией дефекта и позволяют уточнить местоположение дефекта.
В процессе обработки производится совместная нелинейная фильтрация на основе фильтров Колмогорова-Винера, Баттерворта и Чебышева, измеренные сигналы поля выравниваются на основе чего получают скорретированные модули (инварианты) и компоненты магнитного поля, уточняется местоположение участков аномальной акустической эмиссии и зон тепловых или химических аномалий.
Далее, на основе стандартных алгоритмов производят обработку полученных записей, в частности производят частотную фильтрацию (например, быстрое Фурье-преобразование или используют фильтры Ферстера), производят корреляционный анализ с использованием, при подборе параметров дефекта метода наименьших квадратов. Для подтверждения правильности вывода о характере дефекта используется математическое моделирование.
Кроме того, датчики акустической эмиссии утечек обеспечивают надежную регистрации утечек жидкости через сквозные отверстия, вызывающей образования турбулентности и кавитации (схлопывание пузырьков воздуха при прокачивании жидкости) сопровождаемой волнами звуковых частот.
Для подтверждения правильности вывода о характере дефекта используется математическое моделирование.
Результатом интерпретации являются:
- обнаружение и распознавание аномалий, сварных швов поперечных и продольных (если они есть), в том числе швов в стадии разрушения;
- обнаружение и оценка дефектов;
- оценка местоположения и геометрических размеров дефекта, в том числе и зон коррозии;
- обнаружение и определение местоположения ремонтных конструкций трубопровода.
На фиг. 5 приведена зависимость разностей компонент и модулей от выноса металла на трубопроводе диаметром 219 мм.
Как видно из приведенного графика:
- Зависимость разностей компонент, модулей и инвариантов от выноса металла на трубопроводе диаметром 219 мм имеет линейный характер. В этом случае можно определять толщину стенок трубопровода по амплитудам компонент и градиентов и опасность выявленных дефектов.
- Максимальная величина разности соосных компонент в ортогональном сечении "Z1 - Z2" отличается от максимальной величины модулей компонент «Tanom1 - Tanom2» на 10-12%, т.е. незначительно.
- Максимальная величина разности соосных компонент в ортогональном сечении "Z1 - Z2" отличается от максимальной величины разности компонент, расположенных на одной плате устройства, т.е. "Z1 - Z3" на 50-53%.
При применении предлагаемого устройства и способа:
1. Становится возможным проведение внутритрубной дефектоскопии на коротких отрезках промысловых, межпромысловых, технологических объектах трубопроводного транспорта, перекачивающих неагрессивные жидкости, нефть, нефтепродукты, газ с содержанием сероводорода (H2S) не более 6%, без установки камер пуска-приема и проведения подготовительных операций.
2. Возможен отказ от внутритрубных дефектоскопов с намагничением труб до насыщения, следовательно, можно проводить работы на естественных полях, что существенно упрощает мониторинг технического состояния трубопровода на особо опасных участках в намеченные интервалы времени, обусловленные прогнозом срока службы.
3. Значительно повышается точность и надежность выявления дефектов трубопроводов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство и способ внутритрубной диагностики технического состояния трубопровода | 2019 |
|
RU2722636C1 |
| УСТРОЙСТВО ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697007C1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697008C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2014 |
|
RU2568808C2 |
| Способ диагностики технического состояния подземных трубопроводов | 2016 |
|
RU2630856C1 |
| СПОСОБ ЭКСТРЕННОЙ ДИАГНОСТИКИ ТРУБОПРОВОДОВ ВЫСОКОГО ДАВЛЕНИЯ | 2010 |
|
RU2442072C1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2012 |
|
RU2504763C1 |
| Способ обнаружения несанкционированных врезок в трубопровод | 2018 |
|
RU2681552C1 |
| Способ обнаружения несанкционированных врезок в подземный трубопровод | 2020 |
|
RU2741177C1 |
| Способ бесконтактного выявления наличия, месторасположения и степени опасности концентраторов механических напряжений в металле ферромагнитных сооружений | 2019 |
|
RU2724582C1 |
Группа изобретений относится к области внутритрубного диагностирования промысловых, межпромысловых, технологических объектов трубопроводного транспорта, перекачивающих неагрессивные жидкости, нефть, нефтепродукты, газ с содержанием сероводорода (Н2S) не более 6%. Техническим результатом является повышение точности и надежности обнаружения и оценки опасности дефектов, местоположения и геометрических размеров дефекта. Технический результат достигается за счет того, что в устройстве внутритрубной диагностики технического состояния трубопровода предлагается в качестве датчиков магнитного поля использовать 32 трехкомпонентных датчика, установленных по 3 однокомпонентных датчика в каждой группе в 12 точках пересечения сферы с соосными вершинами вписанного в нее виртуального икосаэдра, а также в 20 точках пересечения сферы с радиальными лучами, проходящими через центр сферы и центры параллельных граней вписанного виртуального икосаэдра, причем ось первого компонентного из датчиков постоянного магнитного поля в каждой из групп датчиков ортогональна поверхности сферы, тогда как оси остальных двух датчиков одной группы взаимно ортогональны и ортогональны оси первого датчика, с целью одновременного получения модулей инвариантов поля и градиентов нормальных компонент, совместное использование которых повышает надежность данных диагностики дефектов. 2 н. и 16 з.п. ф-лы, 5 ил.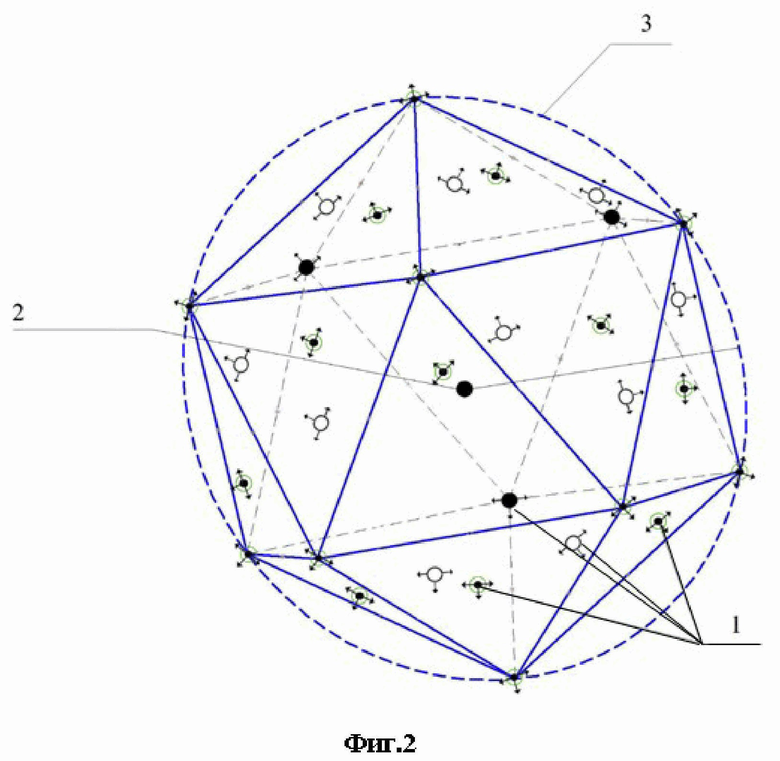
1. Устройство внутритрубной диагностики технического состояния трубопровода, выполненное с возможностью перемещения внутри трубопровода под давлением транспортируемой по трубопроводу жидкости и включающее разъемный корпус сферической формы с размещенными внутри него трехкомпонентными датчиками магнитного поля, датчиками температуры, акселерометрами, датчиком акустической эмиссии в звуковой и сверхзвуковой областях частот и устройством записи данных, измеренных датчиками, отличающееся тем, что 96 однокомпонентных датчиков магнитного поля установлены в виде 32 модулей, причем эти модули расположены в 12 точках пересечения сферы с соосными вершинами вписанного в нее виртуального икосаэдра, а также в 20 точках пересечения сферы с радиальными лучами, проходящими через центр сферы и центры параллельных граней вписанного виртуального икосаэдра, при этом ось первого из датчиков постоянного магнитного поля в каждом модуле датчиков ортогональна поверхности сферы, тогда как оси остальных двух датчиков одного модуля взаимно ортогональны и ортогональны оси первого датчика.
2. Устройство по п.1, отличающееся тем, что имеет внешнюю оболочку в виде полиуретанового слоистого покрытия.
3. Устройства по п.1, отличающееся тем, что изделие состоит из первого корпуса, на котором установлены датчики с электронными узлами, помещающегося во второй жесткий силовой корпус.
4. Устройство по п.1, отличающееся тем, что имеет совпадающий геометрический центр, центр тяжести и центр симметрии вписанного виртуального икосаэдра.
5. Устройство по п.1, отличающееся тем, что в качестве трехкомпонентных датчиков постоянного магнитного поля используют феррозондовые, или магниторезистивные датчики, или датчики туннельные магниторезистивные, или датчики анизотропные магниторезистивные.
6. Устройство по п.1, отличающееся тем, что один датчик акустической эмиссии имеет резонансною частоту в диапазоне звуковой и сверхзвуковой областей частот от 0,1 кГц до 180 кГц.
7. Устройство по п.1, отличающееся тем, что в качестве запоминающего устройства используют микроSD-карту.
8. Устройство по п.1, отличающееся тем, что в качестве запоминающего устройства используют Flash-память.
9. Устройство по п.1, отличающееся тем что для оцифровки данных с 96-ти аналоговых каналов используется 16-разрядное АЦП.
10. Способ внутритрубной диагностики технического состояния трубопровода, содержащего транспортируемую по нему жидкость, обеспечивающую перемещение внутри трубопровода под давлением жидкости и газа, транспортируемого по трубопроводу, устройства по п.1, измерение этим устройством характеристик магнитного поля внутри трубопровода и вычисление на основе полученных данных диагностических параметров трубопровода, отличающийся тем, что в качестве характеристик магнитного поля измеряют не менее 96 компонент магнитной индукции внутреннего поля трубопровода, вычисляют на основе измеренных компонент магнитной индукции внутреннего поля трубопровода 32 компоненты магнитной индукции магнитного поля и 16 градиентов компонент магнитной индукции этого поля, 32 модуля (инварианта) магнитного поля и 16 градиентов этих инвариантов внутритрубного магнитного поля трубопровода.
11. Способ по п.10, отличающийся тем, что в качестве диагностических параметров вычисляют:
- 32 модуля (инварианта) магнитного поля в различных симметрично и равномерно расположенных точках внутритрубного пространства и 16 градиентов этих инвариантов;
- не менее 32 нормальных (ортогональных поверхностей сферы) компонент магнитной индукции этого поля, установленных в различных симметрично и равномерно расположенных точках внутритрубного пространства;
- не менее 16 градиентов нормальных компонент магнитной индукции этого поля.
12. Способ по п.10, отличающийся тем, что перед началом измерений проводят итеративную высокоточную калибровку устройства.
13. Способ по п.10, отличающийся тем, что измеряют параметры поля акустической эмиссии, температуры теплового поля и давления транспортируемой жидкости в различных точках внутритрубного пространства.
14. Способ по п.10, отличающийся тем, что перед началом проведения итеративной высокоточной калибровки устройства проводят чистку трубопровода с использованием очистных шаров с различными диаметрами.
15. Способ по п.10, отличающийся тем, что чистка трубопровода прекращается при достижении беспрепятственного прохождения с диаметром соответствующего размеру диаметра измерительного устройства.
16. Способ по п.10, отличающийся тем, что передача измерительной информации от компьютера или мобильного устройства в устройство по п.1 и обратно производится беспроводным способом.
17. Способ по п.10, отличающийся тем, что имеются два режима работы передачи измерительной информации: режим записи собранных данных на карту памяти и режим передачи данных по USB.
18. Способ по п.17, отличающийся тем, что передача данных по USB производится в пакетном режиме.
| Устройство и способ внутритрубной диагностики технического состояния трубопровода | 2019 |
|
RU2722636C1 |
| Аппарат для непрерывной варки олифы | 1928 |
|
SU11497A1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697008C1 |
| УСТРОЙСТВО ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697007C1 |
| РОБОТ ДЛЯ ТЕХНИЧЕСКОГО КОНТРОЛЯ ТРУБОПРОВОДОВ И СЛОЖНЫХ ИЗГИБНЫХ УЧАСТКОВ ТРУБ | 2019 |
|
RU2707306C1 |

