Изобретение относится к способам бесконтактной внетрубной диагностики стальных нефтяных труб, применяемых при транспортировке нефти трубопроводным способом, в том числе малого и среднего диаметра (100-500 мм), а также при дефектоскопии стальных и чугунных металлоконструкций.
Известен способ прогнозирования течей в трубопроводах (патент РФ №2062394, МПК F17D 5/02, приоритет от 01.06.1993, опубл. 20.06.1996), включающий измерение градиента горизонтальной составляющей магнитного поля трубопровода, ориентированной вдоль его оси, и измерение отношения вертикальной и горизонтальной составляющих. По проведенным измерениям получают модули характеристических параметров трубопровода, сравнивают их значения на границах дискретных участков, по максимальным значениям модулей градиентов определяют местоположение прогнозируемой течи, а по отношению составляющих определяют вид и размеры дефекта.
Недостатками данного способа являются ограниченные возможности идентификации дефектов с незначительными напряжениями, необходимость существенного приближения датчиков поля к объекту измерений, зависимость выявляемых аномалий от геометрических характеристик условий измерений, необходимость предварительного трассирования трубопроводов и, следовательно, повышение трудозатрат и снижение точности привязки выявляемых дефектов.
Известен также способ контроля и обнаружения дефектов на трубопроводах из ферромагнитных материалов (патент РФ №2294482, МПК F17D 5/02, G01N 27/82, приоритет от 18.10.2005, опубл. 27.03.2007). Способ основан на измерении абсолютной величины модуля и/или градиента модуля магнитной индукции, предусматривает построение графиков этих величин, получение для выбранных участков средних значений этих величин, вычисление среднеквадратичных отклонений этих величин от их средних значений, выделение участков, для которых отклонение в два и более раз превышает среднеквадратичное, определение на местности участков, соответствующих выделенным на графиках, и проведение на этих участках работ методами неразрушающего контроля. При реализации способа необходимо соблюдение одинакового расстояния между датчиками (преобразователями) магнитной индукции или незначительное отклонение от этого равенства и постоянство глубины погружения трубопровода.
Недостатками способа являются пропуск аномалий от дефектов, магнитные моменты которых ориентированы неоптимально по отношению к датчикам поля, зависимость результатов диагностики от глубины погружения трубопровода, т.к. практически невозможно обеспечить одинаковое расстояние между осью трубопровода и датчиками, вследствие чего возникают ошибки при ранжировании аномалий, необходимость предварительного трассирования и, следовательно, снижение производительности работ и точности привязки аномалий.
Известен также «Магнитный локатор дефектов и повреждений труб» (патент РФ №2005139236, МПК G01N 27/82, приоритет 12.15.2005, опубл. 06.27.2007). Магнитный локатор включает измерительные катушки и два постоянных магнита. Полезный эффект достигается за счет использования измерительных катушек седлообразной формы. Недостатками предложенного локатора являются необходимость существенного приближения локатора к трубопроводу и отсутствие контроля расстояния между локатором и трубопроводом.
Известен способ бесконтактного выявления местоположения и характера дефектов металлических сооружений и устройство для его осуществления (патент РФ №2264617, МПК G01N 27/82, G01V 3/08, приоритет от 23.05.2001, опубл. 20.11.2005). Способ включает измерение индукции постоянного магнитного поля над трубопроводом, перемещение датчиков и аппаратуры вдоль трубопровода, измерение магнитного поля в прямоугольных координатах двумя трехкомпонентными датчиками, составление тензора градиентов постоянного магнитного поля, обработку полученной информации путем матричного преобразования, определение фоновых значений и отклонений от этих значений. По отличию отклонений на заданную критериальную величину от фоновых значений судят о наличии и местоположении дефектов трубопроводов и строят магнитограмму с указанием местоположения дефектов.
Использование данного способа так же, как и предыдущего, приводит к пропуску аномалий при неоптимальной ориентации магнитного момента дефекта и датчиков поля. В известном способе не учитывается также фактическая невозможность получения тензора градиентов по измерениям двумя трехкомпонентными датчиками. Во-первых, использование двух-пятикомпонентных датчиков не обеспечивает получение полной матрицы тензора градиента, поскольку в этом случае не получается полный набор компонент, т.к. минимально необходимое количество трехкомпонентных датчиков равно шести. Во-вторых, не все компоненты тензора могут быть получены с необходимой точностью и поэтому матричные преобразования приводят к большим погрешностям. Недостатком известного способа является также необходимость предварительного трассирования трубопроводов, что приводит к повышению трудозатрат и снижению точности привязки выявляемых дефектов.
Наиболее близким к предлагаемому техническому решению по совокупности существенных признаков является способ диагностики технического состояния подземных трубопровода и устройство для его осуществления, описанные в патенте РФ №2453760 от 18.12.2009 г. Известный способ включает измерение компонент постоянного магнитного поля над трубопроводом не менее чем в шести точках пространства над трубопроводом, при перемещении трехкомпонентных датчиков поля вдоль трубопровода, математическую обработку измерения и по полученным данным идентификацию и ранжирование особенностей технического состояния трубопроводов. Для лучшей геометризации трубопровода при перемещении датчиков поля вдоль трубопровода используют возбуждаемые переменные магнитные поля, измеряют расстояние от датчиков до проекции оси трубопровода на дневную поверхность, индицируют величину и направление удаления датчиков от проекции оси трубопровода, на основании чего оператор корректирует путь перемещения вдоль трубопровода.
Известное устройство включает узел датчиков постоянного магнитного поля, состоящий, по меньшей мере, из шести трехкомпонентных датчиков, полевой компьютер и блок сбора данных и управления (БСДУ).
Недостатком прототипа является необходимость измерений над трубопроводом в существенно неоднородном магнитном поле, получаемые в этом случае разности одноименных компонент поля не являются градиентами поля, так как градиенты должны получаться на основе бесконечно малого расстояния между датчиками.
Действительно, глубина погружения промыслового трубопровода в основном составляет 1-2 метра, а размеры базы датчиков, используемых для получения разностей компонент поля, в современных конструктивах составляют 0,8-1 метр (См., например, Е.И.Крапивский, В.О.Некучаев, Дистанционная магнитометрия газонефтепроводов, учебное пособие. Ухта: УГТУ, 2011, стр.76-78.). В этом случае происходит смещение рабочей (средней) точки базы датчиков и результаты интерпретации становятся ошибочными.
В современных нефтяных полях, например, в г. Ноябрьске для добычи и транспортировки нефти используется система кустов скважин. Промысловые трубы от скважин могут сходиться в одной точке. Как показал опыт работ, трассирование нефтепроводов на основе использования переменных магнитных полей, создаваемых генераторными установками или станциями катодной защиты, весьма затруднено. В этом случае необходимым элементом работы является трассирование нефтепроводов по их постоянным магнитным полям.
Приближение нефтепровода к поверхности земли при высокой чувствительности датчиков поля и их ограниченном динамическом диапазоне нередко приводит к перегрузкам измерительных каналов. Получаемые при этом сигналы поля, например при вычислении градиентов поля, могут трактоваться как аномалии, связанные с дефектами.
Задачей изобретения является разработка способа диагностики технического состояния стальных трубопроводов и устройства для его осуществления, которые бы позволили существенно повысить точность и информативность выявления дефектов и траектории залегания трубопровода.
Таким образом, технический результат состоит в повышении точности определения траектории залегания трубопровода, в повышении точности обнаружения, геометризации и ранжирования дефектов металла и изоляции, а также в расширении области применения способа, поскольку его можно применять для труб меньшего диаметра.
Для решения поставленной задачи необходимо следующее:
- существенно увеличить чувствительность датчиков измерительной установки (в 3-5 раз), что позволит на основе теоретических расчетов и практических данных повысить реальную точность измерений и проводить диагностику дефектов на трубах малого и среднего диаметра;
- существенно уменьшить базы датчиков (в 2-3 раза), что позволяет упростить и ускорить процесс измерений и работу оператора вследствие уменьшения габаритов установки, а также даст возможность увеличить разрешающую способность метода диагностики;
в процесс интерпретации ввести тензорную обработку результатов измерений с получением линейных, квадратичных и кубических инвариантов, а также провести решение системы нелинейных уравнений с получением магнитных моментов аномалий дефектов, что позволяет увеличить точность геометризации дефектов металла и затем повысить точность ранжирования дефектов для промысловых труб малого и среднего диаметра;
- ввести индикатор перегрузок и учет перегрузок при автоматизации интерпретации, что позволяет уменьшить их искажающее влияние на результаты измерений;
- обеспечить получение разностей модулей компонент поля по поперечной горизонтальной оси, на основе которых можно выдавать речевые рекомендации по направлению движения оператора, что позволит совместить работы по трассированию и диагностике и облегчить организацию работ.
Технический результат достигается за счет того, что в способе диагностики технического состояния подземных трубопроводов, включающем измерение компонент постоянного магнитного поля над трубопроводом не менее чем в шести точках пространства над трубопроводом, математическую обработку измерений и по полученным данным идентификацию и ранжирование особенностей технического состояния трубопроводов, предлагается:
- измерять компоненты постоянного магнитного поля над трубопроводом с помощью, по меньшей мере, 18 однокомпонентных датчиков поля,
- в качестве математической обработки использовать тензорную обработку матрицы градиентов, составленной на основе результатов измерений суммы и разности сигналов соосных компонент поля, с получением линейных, квадратичных и кубических инвариантов и вычисления компонент магнитных моментов аномалий дефектов, полученных на основе решения системы уравнений, в результате проведенной обработки получать 3D характеристики магнитного поля в околотрубном пространстве, на основе которых решать задачи геометризации и диагностики,
- осуществлять компенсацию влияния на результаты измерений постоянного магнитного поля Земли путем подключения к каждому из датчиков компенсационных обмоток, включенных для каждой из одноименных обмоток датчиков последовательно и навстречу друг другу,
- при обработке измерений исключать из обработки интервалы записи измерений, превышающие время действия перегрузок, определяемое по превышению амплитуд пороговых значений измеряемых сигналов. Дополнительными отличиями предлагаемого способа является то, что:
- дополнительно для датчиков, находящихся вдоль оси, ориентированной параллельно поверхности земли и перпендикулярно трубопроводу, получают разность модулей компонент и на основе знака и величины этой разности подают речевые указания оператору по направлению движения, в результате чего совмещают решение задач диагностики и трассирования на основе единого измерительного комплекса.
Технический результат достигается за счет того, что устройство для диагностики технического состояния подземных трубопроводов, включающее узел датчиков постоянного магнитного поля, блок сбора данных и управления (БСДУ) и полевой компьютер предлагается выполнить следующим образом:
- узел датчиков постоянного магнитного поля, по меньшей мере, из 18 однокомпонентных датчиков магнитного поля,
- к каждому из датчиков предлагается дополнительно подключить компенсационные обмотки, включенные для каждой из одноименных компонент датчиков последовательно и навстречу друг другу,
- к компенсационным обмоткам каждой пары датчиков подключить устройства сложения и устройства вычитания сигналов поля,
- три однокомпонентных датчика, наиболее приближенные к поверхности Земли, дополнительно снабдить тремя датчиками перегрузок.
БСДУ предлагается выполнить следующим образом:
- ввести, по меньшей мере, четыре аналого-цифровых преобразователя, входы которых подключить к выходам устройств вычитания и сложения сигналов поля,
- ввести, по меньшей мере, четыре ретранслирующих модуля, связанных с одной стороны с аналого-цифровыми преобразователями, а с другой стороны через каналы взаимодействия с принимающими модулями,
- выходы принимающих модулей соединить с формирователем выходных сигналов, который в свою очередь через USB-порт связать с персональным компьютером.
Дополнительными отличиями предлагаемого устройства являются:
- наличие наушников, подключенных к полевому компьютеру, который оснащен блоком выработки речевых команд.
- а также то, что в качестве однокомпонентных датчиков могут быть применены конструкции феррозондовых или магниторезистивных датчиков,
Таким образом, увеличение чувствительности датчиков достигается тем, что измерительные обмотки каждой из 18 одноименных компонент датчиков, расположенных вдоль осей X, Y и Z, подключаются к устройствам сложения и вычитания сигналов поля, на выходе получаются суммы и разности сигналов этих компонент. На основе этих сумм и разностей, используя несложные математические операции при обработке оцифрованных сигналов в полевом компьютере, получаются компоненты поля и градиенты этих компонент, свободные от влияния флуктуации поля Земли. Затем на основе этих данных производят математическую обработку измерений.
Увеличение чувствительности датчиков достигается также особенностями включения компенсационных обмоток, используемых для уменьшения влияния постоянного магнитного поля Земли. Компенсационные обмотки для каждой пары одноименных компонент датчиков, расположенных соосно, включаются последовательно и навстречу друг другу. В этом случае внешние помехи, в том числе флуктуации магнитного поля Земли, подавляются. Кроме того, исключаются искажения, связанные с нестабильностью частоты возбуждающего поля.
Сущность предлагаемого технического решения поясняется следующими графиками и схемами.
Фиг.1 - блок - схема устройства диагностики технического состояния подземных трубопроводов, где:
1 - 18 - однокомпонентные феррозондовые датчики,
19 - 36 - компенсационные обмотки,
37 - 45 - устройства вычитания сигналов поля,
46 - 54 - устройства сложения сигналов поля,
55 - 57 - датчики перегрузок,
58 - блок сбора данных и управления (БСДУ),
59 - полевой компьютер,
60 - наушники,
61 - блок питания.
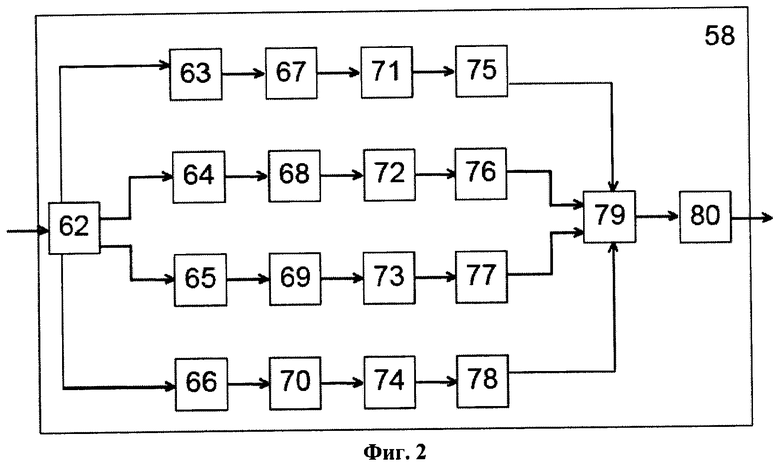
На фиг.2 приведен пример блок-схемы БСДУ, где 62 - аналоговые выходы устройств вычитания и сложения сигналов поля, 63-66 - аналого-цифровые преобразователи, выполненные на четырех 8-канальных платах АЦП,
67-70 - ретранслирующие модули, выполненные на микросхемах LVDS, 71-74 - канал взаимодействия между принимающими и ретранслирующими модулями на базе интерфейса SPI,
75-78 - принимающие модули, выполненные на микросхемах LVDS,
79 - формирователь выходных сигналов, выполненный на основе ПЛИС (программируемая логическая интегральная микросхема),
80 - USB-порт для соединения с персональным компьютером.
На фиг.3 приведена схема измерений шумовых и спектральных характеристик феррозондовых датчиков, где
81 - экран электромагнитный,
82 - датчик индукции магнитного поля (находится в экране 1),
83 - электронная часть магнитоизмерительного канала НВ0300.2.1, коэффициент передачи 1 mV/nT,
84 - фильтр низких частот, полоса частот 0-20 Hz, коэффициент передачи 100.
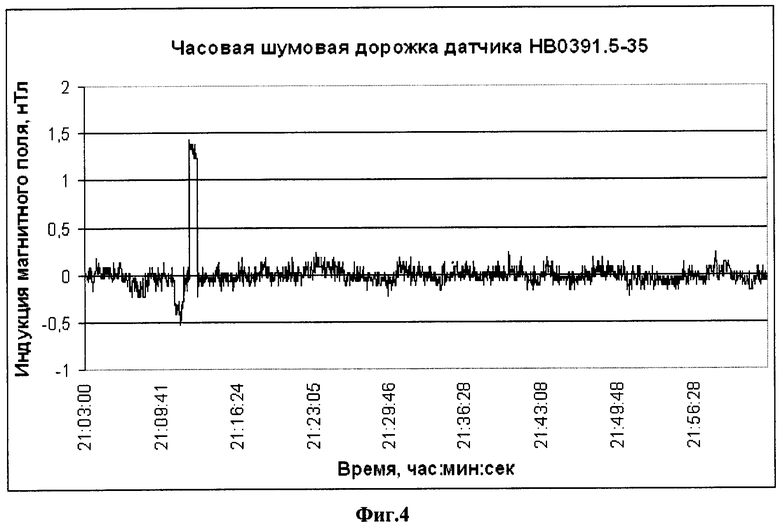
На фиг.4 приведена часовая шумовая дорожка предлагаемого датчика.
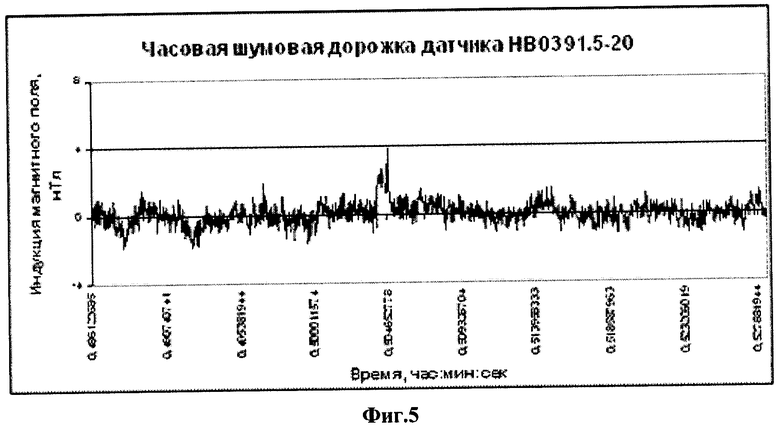
На фиг.5 приведена часовая шумовая дорожка для прототипа.
В качестве математической обработки предлагается использовать тензорную обработку матрицы градиентов, составленной на основе результатов измерений, с получением линейных, квадратичных и кубических инвариантов и компонент магнитных аномалий дефектов, а также проводить решение системы нелинейных уравнений с получением магнитных моментов аномалий дефектов. Использование предлагаемого математического аппарата позволяет существенно повысить точность геометризации дефектов и их диагностику.
Для проведения расчета тензорных характеристик градиентов постоянного магнитного, поля, полученных в результате измерений с предлагаемым устройством, имеем приближенную матрицу градиентов в общем виде:
Откуда получаем по теореме Виетта инварианты поля (скаляры):



Приближенно тензор 
На основе тензора (1) имеем 3 тензора на плоскостях xz, yz, xy 
После получения главных осей тензоров на плоскостях имеем в каждой из плоскостей xz, yz, ху главные значения тензоров:

Для однородной трубы без дефектов:

Направление главных осей определяется из соотношений:
для плоскости xz

для плоскости ху
для плоскости yz
Рассмотрим инварианты в каждой из плоскостей.
Линейный инвариант плоскости xz:
Квадратичный инвариант плоскости xz:
Линейный инвариант плоскости xy:
Квадратичный инвариант плоскости xy:
Линейный инвариант плоскости zy:
Квадратичный инвариант плоскости zy:

Наиболее просто использовать линейные инварианты:
Расчет компонент магнитного момента дефекта. Кроме получения инвариантов предлагаемая методика обработки позволяет получать составляющие полного вектора магнитного момента дефекта.
В том случае, если есть возможность избавиться от влияния на результаты измерений постоянного магнитного поля Земли и трубы, согласно Р.Б. Семевскому (Р.Б. Семевский и др. Специальная магнитометрия. СПб., Наука, 2002, стр.33), компоненты поля и их градиенты связаны соотношениями:

где Bx,By,Bz- компоненты индукции магнитного поля, созданного дефектом в точке измерения,
dBx/dx, dBx/dy, dBx/dz, dBy/dx, dBy/dy, dBy/dz, dBz/dx, dBz/dy, dBz/dy, dBz/dz - градиенты поля в точке измерений, X,Y,Z- координаты центра дефекта в системе координат датчиков. Используя систему уравнений (6), определим величины X,Y,Z. На основе известного (Справочник по математике, стр. 149) способа решения системы линейных уравнений, в данном случае трех уравнений с тремя неизвестными по «правилу Саррюса», имеем:

где D=dBx/dx∗dBy/dy∗dBz/dz+dBx/dy∗dBy/dz∗dBz/dx+dBx/dz∗dBy/dx∗dBz/dy-dBx/dz∗dBy/dy∗dBz/dx-dBx/dx∗dBy/dz∗dBz/dy-dBx/dy∗dBy/dx∗dBz/dz,
D(1)=-3Bx∗dBy/dy∗dBz/dz-3Bz∗dBx/dy∗dBy/dz-3By∗dBx/dz∗dBz/dy+
+3Bz∗dBy/dy∗dBx/dz+3Bx∗dBz/dy∗dBy/dz+3By∗dBz/dz∗dBx/dy,
D(2)=-3By∗dBx/dx∗dBz/dz-3Bx∗dBy/dz∗dBz/dx-3Bz∗dBx/dz∗dBy/dx+
+3By∗dBz/dx∗dBx/dz+3Bz∗dBy/dz∗dBx/dx+3Bx∗dBz/dz∗dBy/dx,
D(3)=-3Bz∗dBx/dx∗dBy/dy-3By∗dBx/dy∗dBz/dx-3Bx∗dBy/dx∗dBz/dy+
+3Bx∗dBz/dx∗dBy/dy+3By∗dBz/dy∗dBx/dx+3Bz∗dBy/dx∗dBx/dy.
Для получения составляющих магнитного момента (Мх,My,Mz)дефекта может быть использована система уравнений:

где 
Аналогично решению системы уравнений(6), используя «правило Саррюса», решается система уравнений (8). В результате имеем:

где Dm=(3X2-r2)(3Y2-r2)(3Z2-r2)+54X2Y2Z2-9X2Z2(3Y2-r2)-9Y2Z2(3X2-r2)-9X2Y2(3Z2-r2), D(4)=100r5Bx(3Y2-r2)(3Z2-r2)+900Bzr5XZY2+900r5ByXYZ2-300r5Bz(3Y2-r2)XZ-900r5Y2Z2Bx-300r5ByXY(3Z2-r2),
D(5)=100r5By(3X2-r2)(3Z2-r2)+900r5BxXYZ2+900r5BzYZX2-900r5ByX2Z2-300r5Bz(3X2-r2)YZ-300r5Bx(3Z2-r2)XY,
D(6)=100r5Bz(3X2-r2)(3Y2-r2)+900r5ByZYX2(+900r5BxXZY2-300r5Bx(3Y2-r2)ZX-900r5ByX2YZ-900r5BxXZY2.
Для фиксации дефектов трубопровода вычисляют производные dMx/dy, dMy/dy, dMz/dy, т.е. продольные производные магнитного момента (вдоль оси трубы).
Кроме того, на основе вычисленных составляющих магнитного момента Mx, My, Mz вычисляют его модуль как корень из суммы квадратов величин составляющих.
Для того чтобы избавиться от влияния на результаты измерений постоянного магнитных полей Земли и трубы, производится осреднение обработанных компонент поля за выбранный интервал времени, т.е. получение оценок математических ожиданий. Затем производится вычитание из измеренных величин компонент поля оценок математических ожиданий.
Использование трассоискателей с искусственными источниками тока не всегда возможно, в особенности для промысловых нефтепроводов, т.к. изоляция у них во многих случаях не обеспечивает достаточно высокий уровень измеряемого сигнала даже при удалении от переносных источника тока на несколько сотен или даже десятков метров, а использование токов катодной защиты затруднено или невозможно.
В случае невозможности использования трассоискателей на основе полей искусственных источников или полей катодной защиты поиски трассы (трассирование) могут быть проведены на основе использования постоянного магнитного поля трубопровода, например с помощью феррозондовых многокомпонентных измерителей КБД.
Как известно, намагничение трубопроводов может быть индуцированным магнитным полем Земли или остаточным, возникающим при изготовлении труб и их эксплуатации.
При вертикальном индуцированном намагничении кругового цилиндра, имитирующего поле трубопровода, графики Zaт (вертикальной компоненты
трубы), Нат (горизонтальной компоненты трубы) и Тат (модуля полного
вектора) приведены в справочнике: Магниторазведка. Справочник геофизика, под. ред. Никитского В.Е. и Глебовского Ю.С. М., Недра, 1990 г., стр. 275.
Как видно из этого графика:

В то же время 
При реальных измерениях имеем:
т.е. разность ΔТат далее не зависит от уровня поля Земли.
Соотношению 
Если Татл<Татп, то оператор находится слева от трубы.
Если Татл>Татп, то оператор находится справа от трубы.
При намагничении, отличном от вертикального, и при угле встречи магнитного меридиана и трубы 90° компоненты поля Zатн и Натн определяются из соотношения:


где φ - угол между направлением магнитного вектора и осью Z. Индекс (н), например Zатн и Натн, означает наклонное намагничивание. Легко показать, что и в этом случае:
Как показали расчеты аномальных полей трубы при угле встречи трубы и магнитного меридиана 0° (градусов), экстремумы Zатн и Татн также не смещены относительно точек проекции центра трубы на дневную поверхность. В этом случае, в зависимости от величины угла наклонения магнитного поля Земли лишь незначительно (на 10-15%) изменяется амплитуда аномалий. Следовательно, на основе проведенных расчетов и математического моделирования можно сделать вывод, что для угла встречи магнитного меридиана с трубой 0° и 90° разность модулей вектора Тат над проекцией центра трубы на дневную поверхность равна нулю.
Критерием получения точек, которые можно использовать для трассирования, должно быть выполнение равенств:
dX/dy=0, dZ/dy=0.
Таким образом, трассирование трубопровода может проводиться по критерию:
dT/dx=0, исключая точки, для которых dX/dy и dZ/dy не равны нулю.
Для осуществления предлагаемого способа необходимо произвести следующие операции:
1. Измерить сигналы суммы и разности 18 соосных одноименных обмоток датчиков постоянного магнитного поля при их перемещении вдоль проекции оси трубопровода на дневную поверхность. В каждый момент измерения отсчеты производятся, по крайней мере, в шести точках пространства над трубопроводом.
Необходимость измерений компонент постоянного магнитного поля в шести точках пространства объясняется необходимостью получения диагностических параметров вдоль трех осей (двух горизонтальных и одной вертикальной). При этом для получения разностей компонент индукции вдоль каждой из осей, т.е. 18 градиентов, используют по шесть однокомпонентных соосных датчика магнитной индукции.
Измерение компонент постоянного магнитного поля и разностей одноименных компонент индукции производится с помощью узла датчиков постоянного магнитного поля.
2. Для подачи речевых команд при трассировании трубы на основе
многоканального феррозондового измерителя последовательность действий следующая:
- ориентируют совокупность горизонтальных датчиков вдоль и перпендикулярно простиранию трубопровода,
- перемещают конструкцию из 12 однокомпонентных датчиков в околотрубном пространстве вдоль трубы, сохраняя их установленную ориентацию,
- в реальном времени с помощью горизонтальных трубок феррозондовых датчиков (продольных и поперечных) измеряют 12 компонент постоянного магнитного поля по осям X, У, Z,
- в реальном времени передают сигналы суммы и разности 12 компонент обмоток постоянного магнитного поля по осям X, У, Z в полевой компьютер,
- в реальном времени в горизонтальных однокомпонентных датчиках (продольных и поперечных) вычисляют модули векторов в левой и правой сторонах трубки датчиков, ориентированной перпендикулярно трубе, и в переднем и заднем концах трубки датчиков, ориентированной вдоль трубы,
- программным способом вычисляют разности модулей компонент поля в продольной (Татпер-Татзад) и поперечной (Татлев-Татправ) трубках датчиков,
- отбраковывают интервалы записи, для которых (Татпер-Татзад) существенно (по статистическим критериям) отличаются от нуля, в зависимости от знака разности (Татлев-Татправ) оператору подается
команда о необходимости коррекции направления движения.
Если:
(Татлев-Татпр≤)≤0, команда оператору двигаться вправо;
(Татлев-Татпр)≥0, команда оператору двигаться влево;
(Татлев-Татпр)=0, оператор должен находиться над трубой.
Устройство для реализации способа диагностики состоит из аналоговой части и цифровой (фиг.1-2).
Аналоговая часть устройства состоит из феррозондовых датчиков с компенсационными обмотками, устройствами суммирования и вычитания и датчиками перегрузок.
Цифровая часть устройства состоит из блока БСДУ (фиг.2), включающего в свой состав, по меньшей мере, четыре аналого-цифровых преобразователя 63-66, входы которых подключены к выходам устройств вычитания 37-45 и сложения 46-54 сигналов поля, по меньшей мере, четыре ретранслирующих модуля 67-70, связанных с одной стороны с аналого-цифровыми преобразователями 63-66, а с другой стороны через каналы взаимодействия 71-74 с принимающими модулями 75-78, выходы которых соединены с формирователем выходных сигналов 79, который, в свою очередь, через USB-порт 80 связан с персональным компьютером 59. А также полевого компьютера с наушниками.
Феррозондовые датчики (1-18) постоянного магнитного поля, входящие в аналоговую часть (фиг.1), установлены на концах крестообразной конструкции из немагнитного материала. Профили, из которых выполнены линейные элементы конструкции, ориентированы вдоль трех пространственных взаимно перпендикулярных осей X,Y,Z. 12 феррозондовых однокомпонентных датчиков расположены в одной плоскости X,Z на концах отрезков трубок. Датчики настроены соосно и их расположение позволяет получать с удовлетворительной точностью градиенты одноименных компонент поля вдоль одной горизонтальной X и вертикальной Z осей. 13-15 феррозондовые однокомпонентные датчики расположены в точке пересечения отрезков, на концах которых расположены первые 12 датчиков, а 16-18 феррозондовые однокомпонентные датчики расположены вне плоскости, в которой расположены остальные датчики вдоль оси У. 13-18 датчики также настроены соосно, с минимальным дисбалансом, и их расположение позволяет получать градиенты одноименных компонент поля вдоль второй горизонтальной оси.
Работа устройства осуществляется следующим образом:
1. Феррозондовые датчики, практически примененные в предложении, являются датчиками активного типа и используют для своей работы ток возбуждения. Ток возбуждения дважды за период доводит ферромагнитные сердечники однокомпонентных датчиков 1-18 (фиг.1) до насыщения, за счет чего изменяется потокосцепление намотанной на сердечник измерительной катушки с внешним магнитным полем. В измерительной катушке возникает переменное электрическое напряжение, частота которого в два раза больше частоты тока возбуждения, а амплитуда пропорциональна постоянной составляющей проекции вектора индукции внешнего магнитного поля на магнитную ось датчика. В компенсационных обмотках 19-36 для каждой из одноименных компонент датчиков внешние помехи, в том числе флуктуации магнитного поля Земли подавляются. Кроме того, исключаются искажения, связанные с нестабильностью частоты возбуждающего поля. Устройства определения разности (устройства вычитания) одноименных компонент 37-45 формируют сигналы, равные разности этих компонент, а устройства определения суммы (устройство сложения) этих компонент 46-54 формируют сигналы их суммы. Сигналы суммы компонент поля и их разностей подаются на блок БСДУ, где с помощью четырех 8-канальных плат АЦП преобразуются в цифровой код.
2. Кроме того, БСДУ производит следующие операции:
- регистрацию в энергонезависимой памяти преобразованных напряжений;
- отображение на индикаторе преобразованных сигналов по запросу оператора;
- выдачу предупреждения на экран индикатора о величине остатка свободной памяти;
- выдачу предупреждения на экран индикатора о падении напряжения аккумуляторной батареи ниже предельно допустимого;
- перекачку зарегистрированной информации в компьютер с архитектурой, совместимой с Х-86 по каналу USB.
3. Микросхемой LVDS по каналу связи (интерфейсу) SPI сигналы передаются на принимающую микросхему LVDS и затем на программируемую логическую микросхему ПЛИС. Микросхема ПЛИС формирует сигналы последовательного интерфейса передачи данных USB.
4. В реальном времени передаются сигналы суммы и разности 12 компонент обмоток постоянного магнитного поля по осям X, У, Z в полевой компьютер.
В реальном времени в горизонтальных однокомпонентных датчиках (продольных и поперечных) вычисляются модули векторов в левой и правой сторонах трубки датчиков, ориентированной перпендикулярно трубе, и в переднем и заднем концах трубки датчиков, ориентированной вдоль трубы.
Программным способом вычисляются разности модулей компонент поля в продольной (Татпер-Татзад) и поперечной (Татлев-Татправ) трубках датчиков.
Отбраковывают интервалы записи, для которых (Татпер-Татзад) существенно (по статистическим критериям) отличаются от нуля.
В зависимости от знака разности (Татлев-Татправ) оператору подается команда о необходимости коррекции направления движения. Если (Татлев-Татпр≤)≤0, команда оператору двигаться вправо, если (Татлев-Татпр)≥0, команда оператору двигаться влево, если (Татлев-Татпр)=0, оператор должен находиться над трубой.
Благодаря реализации отличительных признаков предлагаемого технического решения (в совокупности с признаками, приведенными в ограничительной части формулы предложения) обеспечивается получение надежных статистических пространственных характеристик магнитного поля трубопровода и, соответственно, повышается надежность обнаружения его дефектов. Кроме того, надежная фиксация характеристик магнитного поля в пространстве и во времени, в том числе благодаря записи измерительной информации в памяти полевого компьютера. Становится возможным определять не только образовавшиеся дефекты, но и места с высокой концентрацией механических напряжений и места с заметными механическими колебаниями трубопроводов, чреватые возникновением и развитием стресс-коррозионных дефектов трубопроводов. Размещение преобразователей магнитного поля в трех взаимно перпендикулярных плоскостях и заявленная схема их дифференциального включения позволяет существенно повысить помехоустойчивость устройства в условиях атмосферных помех как естественного, так и промышленного происхождения.
Для подтверждения достигаемого увеличения чувствительности магнитных датчиков ниже приводятся материалы измерений шумовых характеристик феррозондовых датчиков индукции магнитного поля прототипа и датчиков с увеличенной чувствительностью согласно предлагаемому изобретению.
На фиг.3 приведена схема измерений, с помощью которой снимались шумовые параметры устройства-прототипа и предлагаемого устройства. Спектральная плотность мощности шумовой составляющей напряжения прототипа на выходе фильтра 4 в полосе частот 0-5 Hz составляет примерно - 38dBV/√Hz, а в полосе частот 10-20 Hz составляет примерно -43 dBV/√Hz. Спектральная плотность мощности собственного шума датчика прототипа составляет:
среднее значение спектральной плотности мощности собственного шума датчика в полосе частот ОД-20 Hz составляет 110 pT/√Hz.
Спектральная плотность мощности шумовой составляющей напряжения предлагаемого устройства на выходе фильтра 4 на частоте 9,1 Гц составляет примерно -42 dBV/√Hz, на частоте 1 Гц составляет примерно -50 dBV/√Hz, а в полосе частот 10-20 Hz составляет примерно -60 dBV/√Hz. Спектральная плотность мощности собственного шума предлагаемого датчика составляет:
Таким образом, среднее значение спектральной плотности мощности собственного шума датчика в полосе частот 0,1-20 Hz составляет 18 pT/√Hz.
На фиг.4 приведена часовая шумовая дорожка предлагаемого устройства. В процессе записи дорожки в магнитном экране на некоторое время создавалось магнитное поле индукцией 1,3 нТл (на фиг.4 выброс графика вверх импульсной формы). На частоте 10 Гц собственный шум датчика НВ0391.5-35 (предлагаемый) составил 6,3 pT/√Hz, ширина шумовой дорожки 30 рТ в полосе частот 0-20 Гц.
Для сравнения на фиг.5 приведена часовая шумовая дорожка датчика (прототипа) НВ391.5-20, в процессе записи которой в магнитном экране на некоторое время также создавалось поле индукцией 1,3 нТл (импульс поля мало контрастен на фоне шума датчика).
Измерения шумовых параметров датчиков проводились на магнитной станции ФГУНПП «Геологоразведка» во Всеволожске.
Таким образом, как видно из представленных материалов, уменьшение сигналов шума peak to peake (пик ту пик) в полосе частот 0,1-20 Гц имеет место более чем в 6 раз.
Уменьшение уровня шума позволяет уменьшить размеры баз датчиков. Так, например, без уменьшения измеряемых сигналов база вертикальных датчиков составила 25 см (вместо 80 см в прототипе), база горизонтальных датчиков составила 20 см (вместо 60 см в прототипе). Уменьшение размеров базы датчиков позволило уменьшить габариты и вес измерительной установки в целом и приблизить датчики к диагностируемым дефектам до 25-30 см над поверхностью Земли в околотрубном пространстве, что увеличивает надежность диагностики дефектоскопии.
Таким образом, уменьшение размеров базы датчиков уменьшает погрешности получение матрицы градиентов и повышает точность определения дефектов трубопровода.
Однако приближение датчиков к поверхности Земли создает опасность перегрузок измерительных каналов. В процессе автоматизированной обработки, например при проведении фильтрации сигналов, моменты перегрузок могут быть пропущены, а сами градиенты искажены.
Для фиксации моментов перегрузок вводятся блоки фиксации перегрузок, срабатывающие при превышении амплитуд пороговых значений сигналов. Превышение пороговых значений имеет место не только для компонент поля, но и для градиентов сигналов, имеющих большую чувствительность и меньший динамический диапазон, чем измерительные каналы компонентов.
Блоки фиксации перегрузок вводятся для нижних датчиков поля вертикальной трубки, наиболее приближенных к земле. При обработке сигналов поля изымаются интервалы записи, превышающие время действия перегрузок, до действия перегрузки и после их действия в зависимости от способов осреднения при вычислении фоновых значений поля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ диагностики технического состояния подземных трубопроводов | 2016 |
|
RU2630856C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2014 |
|
RU2568808C2 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2012 |
|
RU2510500C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2009 |
|
RU2453760C2 |
| УСТРОЙСТВО И СПОСОБ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2022 |
|
RU2784140C1 |
| СПОСОБ И УСТРОЙСТВО БЕСКОНТАКТНОЙ ВНЕТРУБНОЙ ДИАГНОСТИКИ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2012 |
|
RU2504762C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2634755C2 |
| УСТРОЙСТВО ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697007C1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697008C1 |

Изобретение относится к способам бесконтактной внетрубной диагностики стальных нефтяных труб, применяемых при транспортировке нефти трубопроводным способом, в том числе малого и среднего диаметра (100-500 мм), а также при дефектоскопии стальных и чугунных металлоконструкций. Технический результат: повышение точности определения траектории залегания трубопровода, обнаружения, геометризации и ранжирования дефектов металла и изоляции. Сущность: в способе диагностики в качестве датчиков поля используют, по меньшей мере, 18 однокомпонентных датчиков постоянного магнитного поля, осуществляют компенсацию влияния на результаты измерений флуктуации постоянного магнитного поля Земли. Математическую обработку измерений проводят на основе суммы и разности сигналов соосных компонент поля. В качестве математической обработки используют тензорную обработку матрицы градиентов, составленной на основе результатов измерений, с получением линейных, квадратичных и кубических инвариантов и вычисления компонент магнитных моментов аномалий дефектов, полученных на основе решения системы уравнений. При обработке измерений исключают из обработки интервалы записи измерений, превышающие время действия перегрузок, определяемое по превышению амплитуд пороговых значений измеряемых сигналов. 2 н. и 4 з.п. ф-лы, 5 ил.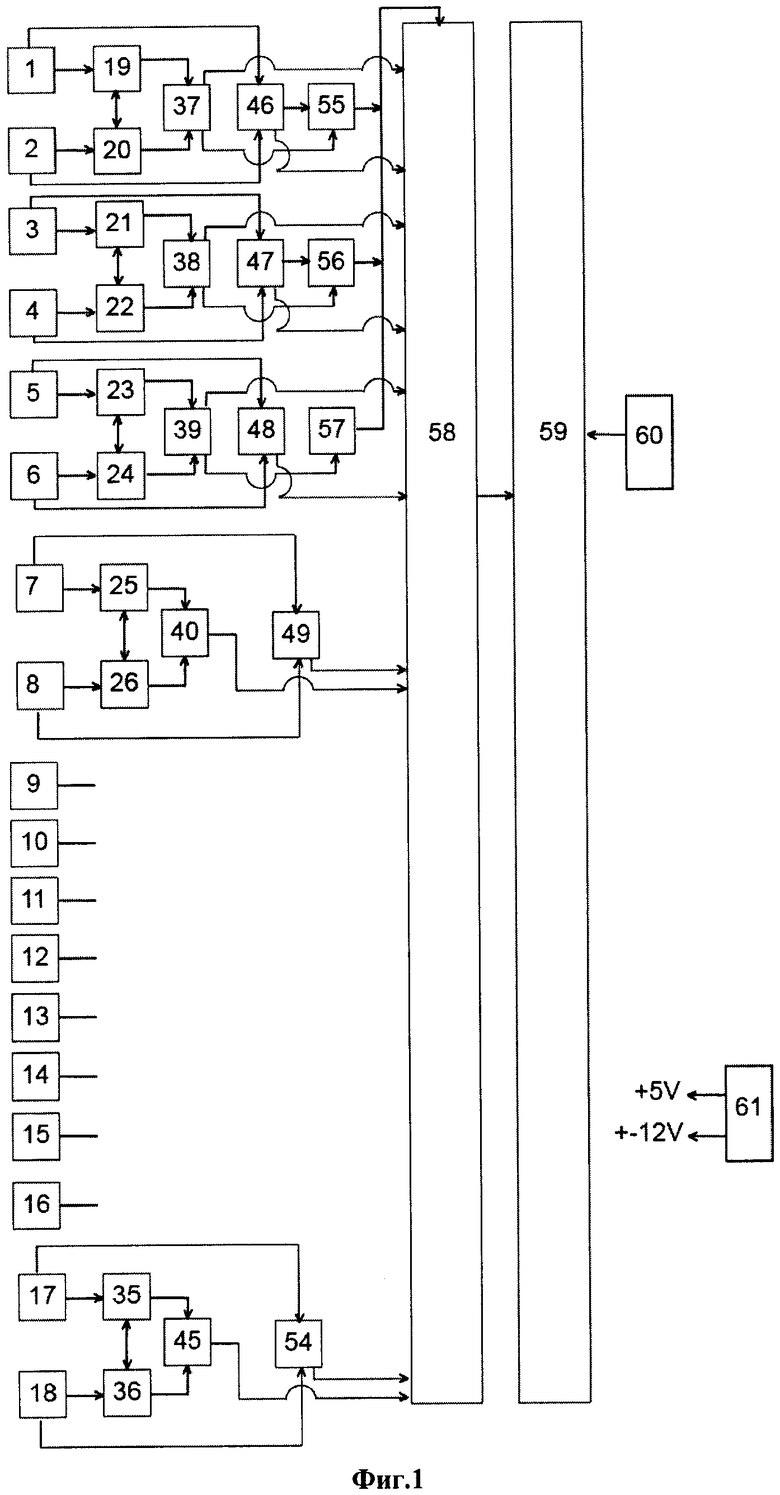
1. Способ диагностики технического состояния подземных трубопроводов, включающий измерение компонент постоянного магнитного поля над трубопроводом не менее чем в шести точках пространства над трубопроводом, при перемещении датчиков поля вдоль трубопровода, математическую обработку измерения и по полученным данным идентификацию и ранжирование особенностей технического состояния трубопроводов, отличающийся тем, что в качестве датчиков поля используют, по меньшей мере, 18 однокомпонентных датчиков постоянного магнитного поля, осуществляют компенсацию влияния на результаты измерений флуктуации постоянного магнитного поля Земли путем подключения к каждому из датчиков компенсационных обмоток, включенных для каждой из одноименных компонент датчиков последовательно и навстречу друг другу, в качестве математической обработки используют тензорную обработку матрицы градиентов, составленной на основе результатов измерений суммы и разности сигналов соосных компонент поля, с получением линейных, квадратичных и кубических инвариантов и вычисления компонент магнитных моментов аномалий дефектов, полученных на основе решения системы уравнений, причем при обработке измерений исключаются из обработки интервалы записи измерений, превышающие время действия перегрузок, определяемое по превышению амплитуд пороговых значений измеряемых сигналов.
2. Способ диагностики технического состояния подземных трубопроводов по п.1, отличающийся тем, что дополнительно для датчиков, находящихся вдоль оси, ориентированной параллельно поверхности Земли и перпендикулярно трубопроводу, измеряют разность модулей компонент и на основе знака и величины этой разности подают речевые указания оператору по направлению движения.
3. Устройство диагностики технического состояния подземных трубопроводов, включающее узел датчиков постоянного магнитного поля, полевой компьютер и блок сбора данных и управления (БСДУ), отличающееся тем, что узел датчиков постоянного магнитного поля состоит, по меньшей мере, из 18 однокомпонентных датчиков магнитного поля, к каждому из которых дополнительно подключены компенсационные обмотки, включенные для каждой из одноименных компонент датчиков последовательно и навстречу друг другу, к компенсационным обмоткам каждой пары датчиков подключены устройства сложения и устройства вычитания сигналов поля, причем три однокомпонентных датчика, наиболее приближенные к поверхности Земли, дополнительно снабжены тремя датчиками перегрузок.
4. Устройство по п.3, отличающееся тем, что БСДУ включает, по меньшей мере, четыре аналого-цифровых преобразователя, входы которых подключены к выходам устройств вычитания и сложения сигналов поля, по меньшей мере, четыре ретранслирующих модуля, связанных с одной стороны с аналого-цифровыми преобразователями, а с другой стороны через каналы взаимодействия с принимающими модулями, выходы которых соединены с формирователем выходных сигналов, который, в свою очередь, через USB-порт связан с персональным компьютером.
5. Устройство по п.4, отличающееся тем, что в качестве однокомпонентных датчиков могут быть применены конструкции феррозондовых или магниторезистивных датчиков.
6. Устройство по п.5, отличающееся тем, что дополнительно включает наушники, подключенные к полевому компьютеру, который оснащен блоком выработки речевых команд.
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2009 |
|
RU2453760C2 |
| СПОСОБ БЕСКОНТАКТНОГО ВЫЯВЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ХАРАКТЕРА ДЕФЕКТОВ МЕТАЛЛИЧЕСКИХ СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2264617C2 |
| СПОСОБ КОНТРОЛЯ И ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА ТРУБОПРОВОДАХ ИЗ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ | 2005 |
|
RU2294482C1 |
| Газовая турбина | 1924 |
|
SU1751A1 |
| Способ вырезки образцов из сварных соединений трубопроводов, коллекторов и других деталей для производства металлографических исследований и механических и других испытаний шва и материала трубы | 1954 |
|
SU101206A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И НЕСАНКЦИОНИРОВАННЫХ ВРЕЗОК В ТРУБОПРОВОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2379579C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ВНУТРИПРОМЫСЛОВЫХ ТРУБОПРОВОДОВ | 2006 |
|
RU2301941C1 |
| Пневматический накопитель фотопленки | 1979 |
|
SU855595A1 |
| US 2007222436, 27.09.2007. | |||

