Комплекс относится к технике для ликвидации последствий чрезвычайных ситуаций и защиты путей эвакуации из зон с экстремально высокой температурой и взвешенными в воздухе продуктами горения и может быть использован для решения широкого спектра задач при ликвидации последствий техногенных и природных чрезвычайных ситуаций.
Известны пожарные автомобили ГОСТ Р 53247-2009 "Техника пожарная. Пожарные автомобили. Классификация, типы и обозначения".
Наиболее близким по технической сути является «Автомобиль пожарный», по патенту на изобретение №2723771, опубликованный 17.06.2020, МПК A62C27/00, содержащий шасси повышенной проходимости, на котором установлены двигатель внутреннего сгорания с валом отбора мощности, кабина с органами управления пожаротушением и кузов с пожарно-техническим оборудованием, включающим пожарную штурмовую лестницу с подъемным приводом, цистерну для воды с запорной арматурой, средства водяного пожаротушения, пожарный насос, водонапорные и водозаборные рукава, причем штурмовая лестница выполнена раздвижной и установлена на крыше кузова автомобиля, на крыше кабины которого установлен лафетный стол для крепления средств пожаротушения. Автомобиль дополнительно содержит устройство водяной защиты от возгорания, устройство защиты стекол автомобиля от повреждений механическими предметами очага пожара и устройство для доставки средств пожаротушения к очагу пожара, причем устройство водяной защиты содержит распылительные головки, установленные с возможностью образования водяной завесы от огня с боковых сторон и с передней части автомобиля, устройство защиты стекол автомобиля выполнено в виде съемных металлических сеток, а устройство доставки средств пожаротушения к очагу пожара выполнено в виде съемного тройника, снабженного средствами крепления к перекладинам верхнего конца штурмовой лестницы и муфтами для соединения тройника по входу с выходом водонапорных труб, а по выходам - со средствами пожаротушения.
Известное решение обладает возможностью отбора воды из естественных или искусственных водоемов, например, пожарного пруда, при этом водозаборный конец мотопомпы опускают в открытый водоем. При небольшой глубине водоема, из которого производится забор воды, возникает риск не регламентируемого забора атмосферного воздуха и риск засорения магистрали крупными донными фрагментами. Известное решение позволяет создавать водяную завесу от огня с передней и боковых сторон автомобиля. Однако, известное решение не может обеспечить формирование регулируемой защитной зоны с пониженной температурой и осаждением продуктов горения в отдалении от пожарного автомобиля, например, внутри здания. В составе известного решения не предусмотрено оборудование позволяющее осуществлять резку строительных и ограждающих конструкций, мешающих устранению очагов возгорания, что снижает спектр решения возможных задач.
Задачей предлагаемого технического решения является создание автономного комплекса для ликвидации последствий чрезвычайных ситуаций, сопровождаемых пожаром, обеспечивающего безопасную эвакуацию населения из зон с экстремально высокой температурой и взвешенными в воздухе продуктами горения с возможностью устранения естественных и искусственных препятствий расположенных на пути эвакуации.
Поставленная задача решена за счет мобильного роботизированного комплекса для ликвидации последствий чрезвычайных ситуаций и защиты путей эвакуации, состоящего из ходовой части на шасси повышенной проходимости и корпуса с отсеками для размещения функциональных модулей средств пожаротушения и забора воды, при этом комплекс содержит не менее одного модуля забора воды из естественных водоисточников, выполненного с возможность подачи забранной воды в бак, расположенный в корпусе комплекса; комплекс содержит, не менее одного модуля оператора, выполненного с возможностью гидроабразивной резки ограждающих и строительных конструкций, а так же подачи тонкораспыленной воды или воздушно-механической пены из ручного ствола высокого давления; модуль содержит, не менее одной роботизированной самоходной платформы, управляемой дистанционно и выполненной с возможностью круговой подачи тонкораспыленных огнетушащих веществ из баков, расположенных в корпусе комплекса; модуль забора воды выполнен в виде насосной системы, содержащей выносное устройство забора воды, выполненное в виде поплавковой платформы, снабженной гидродвигателем и водозаборным элементом с фильтром, при этом фильтр выполнен с возможностью отфильтровывания твердых тел, максимальный линейный размер которых превышает 10 мм, а водозаборный элемент выполнен с возможностью поверхностного забора воды; модуль оператора содержит коллектор, связанный гибким шлангом с инструментом оператора, при этом инструмент оператора снабжен клапаном, ручкой и соплом, а упомянутый коллектор связан трубопроводами с установленными в корпусе мобильного роботизированного комплекса: баком для абразива, баком для воды, баком для пенообразователя и насосом; роботизированная самоходная платформа выполнена в виде робототехнического устройства с возможностью круговой подачи тонкораспыленных огнетушащих веществ в очаг пожара, а также формирования регулируемой защитной зоны с пониженной температурой и осаждением продуктов горения; робототехническое устройство выполнено в форме отдельной самоходной гусеничной платформы, связанной с мобильным роботизированным комплексом посредством гибкого шланга, при этом робототехническое устройство содержит насос, а также распылительную головку с форсунками, установленную с возможностью свободного вращения; форсунки ориентированы таким образом, что при осуществлении распыления в головке возникает крутящий момент.
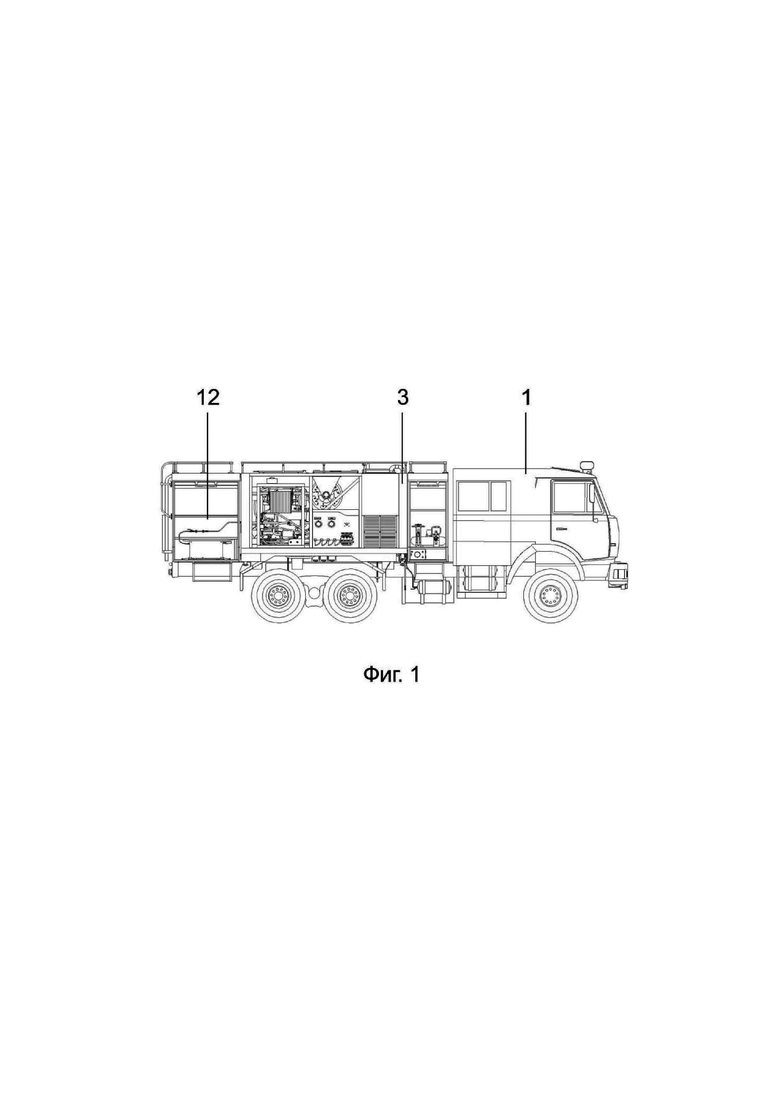
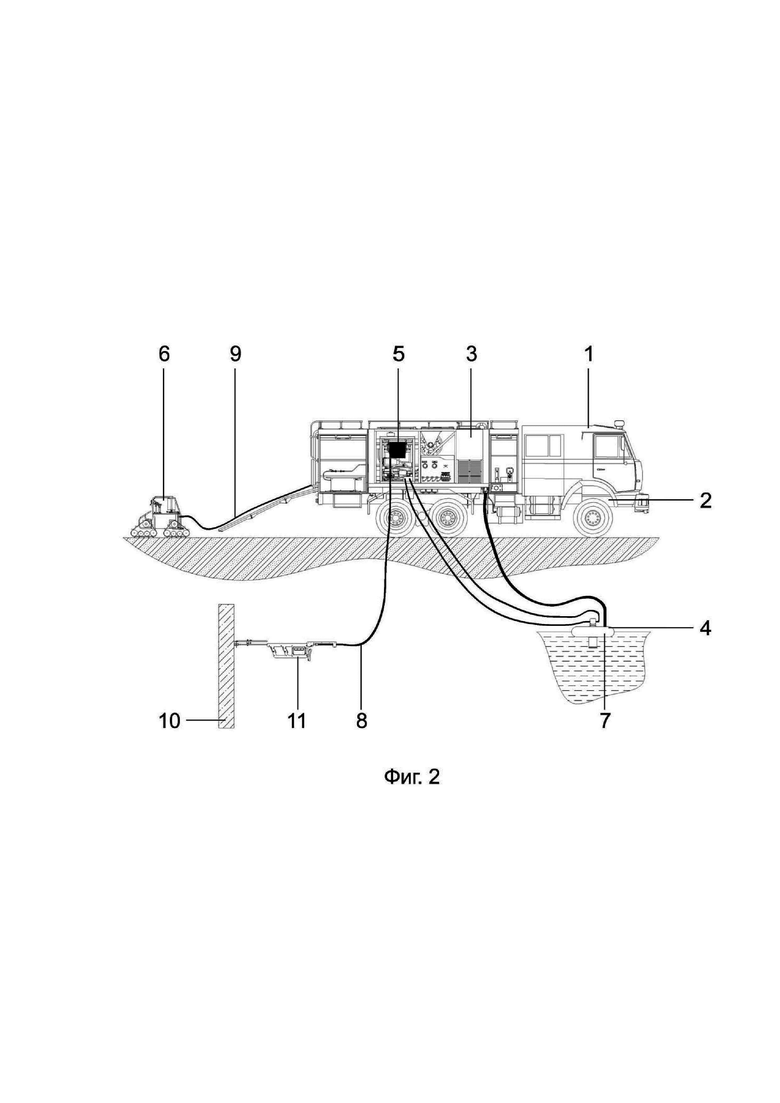
Суть технического решения иллюстрирована чертежами, где на фиг. 1 – мобильный роботизированный комплекс для ликвидации последствий чрезвычайных ситуаций и защиты путей эвакуации, на фиг.2 – мобильный роботизированный комплекс для ликвидации последствий чрезвычайных ситуаций и защиты путей эвакуации с развернутыми средствами пожаротушения и защиты путей эвакуации.
На фиг. 1 и фиг. 2, изображены: мобильный роботизированный комплекс 1, ходовая часть 2, корпус 3, выносное устройство 4 забора воды, модуль 5 оператора, роботизированная самоходная платформа 6, поплавковая платформа 7, гибкий шланг 8, гибкий шланг 9, ограждающая конструкция 10, инструмент 11 оператора, отсек 12 для роботизированной самоходной платформы.
Мобильный роботизированный комплекс для ликвидации последствий чрезвычайных ситуаций и защиты путей эвакуации выполнен следующим образом.
Мобильный роботизированный комплекс 1 состоит из ходовой части 2 на шасси повышенной проходимости и корпуса 3 с отсеками для размещения функциональных модулей средств пожаротушения и забора воды. В качестве колесного шасси повышенной проходимости может быть использовано, например, базовое шасси автомобиля «КАМАЗ». На шасси установлены двигатель внутреннего сгорания с валом отбора мощности, кабина с органами управления пожаротушением и корпус 3 с оборудованием. Оборудование, размещенное в корпусе 3, включает: бортовой компрессор, узел подачи высокого давления, снабженный узлом распределения, модуль 5 оператора, снабженный инструментом 11 оператора, роботизированную самоходную платформу 6 для тушения пожара и осаждения продуктов горения мелкодисперсной водой, гидравлический насос для забора воды из естественных и искусственных водоисточников, выносное устройство 4 забора воды, отсек хранения вспомогательного оборудования, а так же бак для воды, снабженный всасывающими фильтрами, баки пенообразователя и бак абразива. В корпусе 3 расположена водная магистраль, снабженная насосами, приводимыми в движение гидромоторами, связанными трубопроводами с узлом подачи высокого давления. Контроль и управление оборудованием осуществляют с узла распределения, отвечающего за включение и отключение насосных агрегатов и узлов, а также изменения их рабочих характеристик.
Мобильный роботизированный комплекс 1 содержит, по меньшей мере один модуль для забора воды из естественных и искусственных водоисточников, выполненный с возможностью подачи забранной воды в бак для воды, находящийся в корпусе 3. Модуль для забора воды выполнен в виде насосной системы, содержащей выносное устройство 4 забора воды, соединенное гибким шлангом с водной магистралью, расположенной в корпусе 3. Выносное устройство 4 забора воды снабжено гидродвигателем, водозаборным элементом с фильтром и поплавковой платформой 7. Фильтр водозаборного элемента выполнен с возможностью отфильтровывания твердых тел, максимальный линейный размер которых превышает 10 мм, например, при помощи металлической сетки. Поплавковая платформа 7 может быть выполнена, например, в форме пустотелого тора. Поплавковая платформа 7 предназначена для поддержания на плаву, на поверхности водоема, гидродвигателя и водозаборного элемента. За счет того, что водозаборный элемент связан с поплавковой платформой 7, забор воды из водоема осуществляется с постоянной глубины, которая может не превышать 10 мм. Таким образом, наличие поплавковой платформы 7 и фильтра позволяет осуществлять забор воды из различных водоисточников, например, из болотистых или заиленных водоемов, а так же из водоемов с небольшой глубиной, из оборудованных и из необорудованных водоемов, из водоемов имеющих обрывистые берега, с мостов, эстакад, причальных сооружений и так далее. Возможность забора воды из естественных водоисточников малой глубины обеспечивает высокую автономность комплекса.
Мобильный роботизированный комплекс 1 содержит, по меньшей мере один модуль 5 оператора для гидроабразивной резки ограждающих и строительных конструкций 10, а так же подачи тонкораспыленной воды или воздушно-механической пены из ручного ствола высокого давления инструмента 11 оператора. Модуль 5 для гидроабразивной резки содержит коллектор, связанный гибким шлангом 8 с инструментом оператора 11. Коллектор связан трубопроводами с баком для абразива, баком для воды, баком для пенообразователя и насосом. Модуль 5 выполнен с возможностью выбора и регулировки забора продукта из полостей баков, расположенных в корпусе 3, и подачи через гибкий шланг на инструмент 11 оператора. Инструмент оператора 11 снабжен клапаном, ручкой и соплом. Модуль 5 для гидроабразивной резки выполнен с возможностью подачи струи огнетушащих веществ с абразивом со скоростью превышающей 100 м/с, что обеспечивает эффективное разрезание ограждающих и строительных конструкций 10. Выбор состава и скорости подачи огнетушащих средств на инструмент 11 оператора осуществляют с узла распределения. Модуль 5 выполнен с возможностью подачи в режиме пожаротушения струи тонкораспылённой воды со средним диаметром капли 100-200 мкм и меньше, либо раствора пенообразователя. В зависимости от решаемой задачи на инструмент оператора 11 может быть подана вода из бака для воды, пена, или их комбинация, в том числе, с включением абразивного материала.
Мобильный роботизированный комплекс 1 содержит, по меньшей мере одну роботизированную, дистанционно управляемую, самоходную платформу 6, выполненную в виде робототехнического устройства. Самоходная платформа 6 расположена в открываемом отсеке 12 корпуса 3, снабженным разворачиваемым трапом. Робототехническое устройство может быть выполнено, например, в форме отдельной самоходной гусеничной платформы, состоящей из рамы, гусеничных движителей, системы питания и управления. Система питания содержит насос, связанный с баками, расположенными в корпусе 3, гибким шлангом 9. Система управления установлена непосредственно в робототехническом комплексе, имеет автономный источник питания, например аккумуляторную батарею, и модуль дистанционного управления. Самоходная платформа 6 выполнена с возможностью круговой подачи тонкораспыленных огнетушащих веществ из баков, расположенных в корпусе 3 комплекса 1. Круговая подача тонкораспыленных огнетушащих веществ осуществлена посредством распылительной головки, расположенной в верхней части платформы 6. Распылительная головка выполнена с возможностью вращения вокруг собственной оси, за счет, например, размещения распылительной головки на подшипниковой опоре. Распылительная головка содержит форсунки, ориентированные тангенциально, относительно оси ее вращения. Ориентация форсунок осуществлена таким образом, что при распылении через них огнетушащих веществ возникает крутящий момент, обеспечивающий вращение распылительной головки. Вращение распылительной головки при распылении огнетушащих веществ позволяет сформировать в районе платформы 6 стабильную регулируемую защитную зону с пониженной температурой и осаждением продуктов горения.
Мобильный роботизированный комплекс для ликвидации последствий чрезвычайных ситуаций и защиты путей эвакуации используют следующим образом.
В дежурном режиме баки с водой, пенообразователем и абразивом, расположенные в корпусе 3 заправлены. Задвижки клапанов запорной арматуры закрыты. Все аккумуляторные источники питания заряжены. Выносное устройство 4 забора воды, инструмент 11 оператора и пульт радиоуправления роботизированной самоходной платформой 6 расположены на транспортировочных кронштейнах.
При тревоге дежурный расчет занимает места в кабине мобильного роботизированного комплекса 1 и выезжает на место чрезвычайного происшествия. По факту прибытия на место происшествия мобильный комплекс 1 устанавливают на стояночный тормоз, при работающем на холостых оборотах двигателе. В зависимости от решаемой задачи, выполняют развёртывание необходимого оборудования.
При необходимости пополнения запасов воды разворачивают модуль для забора воды. Оператор открывает отсек, снимает с транспортировочного кронштейна выносное устройство 4 забора воды с рукавами высокого давления и, при помощи быстроразъёмного соединения, подключает устройство 4 к трубопроводу, связанному с баком для воды. Затем устройство 4 забора воды располагают на поверхности водоема. За счет наличия поплавковой платформы 7 модуль 4 имеет стабильное положение, относительно уровня воды в водоеме, при этом вход его водозаборного элемента находится в непосредственной близости от поверхности воды, что позволяет осуществлять забор воды из водоемов с малой глубиной.
При необходимости обеспечения регулируемой защитной зоны с пониженной температурой и осаждением продуктов горения, например, при проведении эвакуации из зданий, осуществляют развертывание самоходной платформы 6. Оператор снимает с транспортировочного кронштейна пульт радиоуправления робототехническим устройством. Открывает отсек 12, разворачивает трап, и, при помощи пульта выводит самоходную роботизированную платформу 6 из корпуса 3. Подключает гибкий шланг 9 к самоходной платформе 6. После подачи под давлением огнетушащих веществ через гибкий шланг 9 распылительная головка на платформе 6 начинает вращаться, обеспечивая, таким образом, равномерное распыление огнетушащих веществ вокруг платформы 6, что, в свою очередь, позволяет поддерживать регулируемую защитную зону с пониженной температурой и осаждением продуктов горения. При помощи пульта радиоуправления оператор направляет самоходную платформу 6 в зону, где необходимо обеспечить пониженную температуру и осаждение продуктов горения.
При необходимости вскрытия ограждающих или строительных конструкций 10 и/или произведения тушения очагов возгорания тонкораспыленной водой или пеной осуществляют развертывание модуля 5 оператора. В зависимости от предстоящей задачи, оператор при помощи узла распределения выбирает подаваемый продукт из соответствующего бака и режим его подачи. Оператор открывает отсек, снимает с транспортировочного кронштейна ручной ствол высокого давления, и при помощи быстроразъёмного соединения, посредством гибкого шланга 8, подключает инструмент 11 оператора к модулю 5 оператора. Оператор направляет сопло инструмента 11 на ограждающую или строительную конструкцию 10 и осуществляет ее резку, переведя клапан в открытое положение. Разрезание конструкции 10 осуществляется за счет подачи под большим давлением смеси огнетушащих веществ с абразивным материалом, со скоростью превышающей 100 м/с. При этом, диаметр отверстия формируемого в конструкции 10 совпадает с диаметром струи огнетушащих веществ поступающих из сопла инструмента 11, что исключает эжекцию кислорода и обеспечивает безопасность оператора. При тушении очагов горения оператор инструмента 11 использует огнетушащие средства без включения в них абразивных материалов.
Техническим результатом предлагаемого технического решения является создание автономного комплекса ликвидации последствий чрезвычайных ситуаций сопровождаемых пожаром, способного формировать регулируемую защитную зону с пониженной температурой и осаждением продуктов горения, в том числе внутри строений, обладающего возможностью пополнения средств тушения пожара, а именно воды, из открытых источников с небольшой глубиной и осуществления гидроабразивной резки строительных и ограждающих конструкций за счет мобильного роботизированного комплекса для ликвидации последствий чрезвычайных ситуаций и защиты путей эвакуации, состоящего из ходовой части на шасси повышенной проходимости и корпуса с отсеками для размещения функциональных модулей средств пожаротушения и забора воды, при этом комплекс содержит не менее одного модуля забора воды из естественных водоисточников, выполненного с возможность подачи забранной воды в бак, расположенный в корпусе комплекса; комплекс содержит, не менее одного модуля оператора, выполненного с возможностью гидроабразивной резки ограждающих и строительных конструкций, а так же подачи тонкораспыленной воды или воздушно-механической пены из ручного ствола высокого давления; модуль содержит, не менее одной роботизированной самоходной платформы, управляемой дистанционно и выполненной с возможностью круговой подачи тонкораспыленных огнетушащих веществ из баков, расположенных в корпусе комплекса; модуль забора воды выполнен в виде насосной системы, содержащей выносное устройство забора воды, выполненное в виде поплавковой платформы, снабженной гидродвигателем и водозаборным элементом с фильтром, при этом фильтр выполнен с возможностью отфильтровывания твердых тел, максимальный линейный размер которых превышает 10 мм, а водозаборный элемент выполнен с возможностью поверхностного забора воды; модуль оператора содержит коллектор, связанный гибким шлангом с инструментом оператора, при этом инструмент оператора снабжен клапаном, ручкой и соплом, а упомянутый коллектор связан трубопроводами с установленными в корпусе мобильного роботизированного комплекса: баком для абразива, баком для воды, баком для пенообразователя и насосом; роботизированная самоходная платформа выполнена в виде робототехнического устройства с возможностью круговой подачи тонкораспыленных огнетушащих веществ в очаг пожара, а также формирования регулируемой защитной зоны с пониженной температурой и осаждением продуктов горения; робототехническое устройство выполнено в форме отдельной самоходной гусеничной платформы, связанной с мобильным роботизированным комплексом посредством гибкого шланга, при этом робототехническое устройство содержит насос, а также распылительную головку с форсунками, установленную с возможностью свободного вращения; форсунки ориентированы таким образом, что при осуществлении распыления в головке возникает крутящий момент.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДОСТАВКИ РОБОТЕХНИЧЕСКОГО КОМПЛЕКСА ПОВЫШЕННОЙ ПРОХОДИМОСТИ К МЕСТУ ПОЖАРА И ПРОВЕДЕНИЮ СПАСАТЕЛЬНЫХ РАБОТ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2553016C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ЛОКАЛИЗАЦИИ И ЛИКВИДАЦИИ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2013 |
|
RU2548828C1 |
| МАЛОГАБАРИТНАЯ МОБИЛЬНАЯ РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ | 2018 |
|
RU2685319C1 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |
| СПОСОБ ТУШЕНИЯ ЛЕСНЫХ ПОЖАРОВ И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2677413C1 |
| Пожарный поезд с автономным пожарным модулем контейнерного типа | 2023 |
|
RU2819950C1 |
| Пожарный поезд с автономным пожарным модулем контейнерного типа | 2023 |
|
RU2804551C1 |
| СПОСОБ ТУШЕНИЯ ПОЖАРА С ИСПОЛЬЗОВАНИЕМ ГРУППИРОВКИ РОБОТОТЕХНИЧЕСКИХ СРЕДСТВ | 2018 |
|
RU2680131C1 |
| Автономный пожарный модуль контейнерного типа | 2023 |
|
RU2813419C1 |
| Способ тушения пожаров многофункциональным робототехническим комплексом при авариях в тоннелях | 2024 |
|
RU2834501C1 |
Комплекс относится к технике для ликвидации последствий чрезвычайных ситуаций и защиты путей эвакуации из зон с экстремально высокой температурой и взвешенными в воздухе продуктами горения и может быть использован для решения широкого спектра задач при ликвидации последствий техногенных и природных чрезвычайных ситуаций. Мобильный роботизированный комплекс для ликвидации последствий чрезвычайных ситуаций и защиты путей эвакуации состоит из ходовой части на шасси повышенной проходимости и корпуса с отсеками для размещения функциональных модулей средств пожаротушения и забора воды. Комплекс содержит не менее одного модуля забора воды из естественных водоисточников, выполненного с возможность подачи забранной воды в бак, расположенный в корпусе комплекса. Комплекс содержит не менее одного модуля оператора, выполненного с возможностью гидроабразивной резки ограждающих и строительных конструкций, а также подачи тонкораспыленной воды или воздушно-механической пены из ручного ствола высокого давления. Модуль содержит не менее одной роботизированной самоходной платформы, управляемой дистанционно и выполненной с возможностью круговой подачи тонкораспыленных огнетушащих веществ из баков, расположенных в корпусе комплекса. Модуль забора воды выполнен в виде насосной системы, содержащей выносное устройство забора воды, выполненное в виде поплавковой платформы, снабженной гидродвигателем и водозаборным элементом с фильтром, при этом фильтр выполнен с возможностью отфильтровывания твердых тел, максимальный линейный размер которых превышает 10 мм, а водозаборный элемент выполнен с возможностью поверхностного забора воды. Модуль оператора содержит коллектор, связанный гибким шлангом с инструментом оператора, при этом инструмент оператора снабжен клапаном, ручкой и соплом, а упомянутый коллектор связан трубопроводами с установленными в корпусе мобильного роботизированного комплекса: баком для абразива, баком для воды, баком для пенообразователя и насосом. Роботизированная самоходная платформа выполнена в виде робототехнического устройства с возможностью круговой подачи тонкораспыленных огнетушащих веществ в очаг пожара, а также формирования регулируемой защитной зоны с пониженной температурой и осаждением продуктов горения в форме отдельной самоходной гусеничной платформы, связанной с мобильным роботизированным комплексом посредством гибкого шланга, при этом робототехническое устройство содержит насос, а также распылительную головку с форсунками, установленную с возможностью свободного вращения, а форсунки ориентированы таким образом, что при осуществлении распыления в головке возникает крутящий момент. Техническим результатом предлагаемого технического решения является создание автономного комплекса для ликвидации последствий чрезвычайных ситуаций, сопровождаемых пожаром, обеспечивающего безопасную эвакуацию населения из зон с экстремально высокой температурой и взвешенными в воздухе продуктами горения с возможностью устранения естественных и искусственных препятствий, расположенных на пути эвакуации. 4 з.п. ф-лы, 2 ил.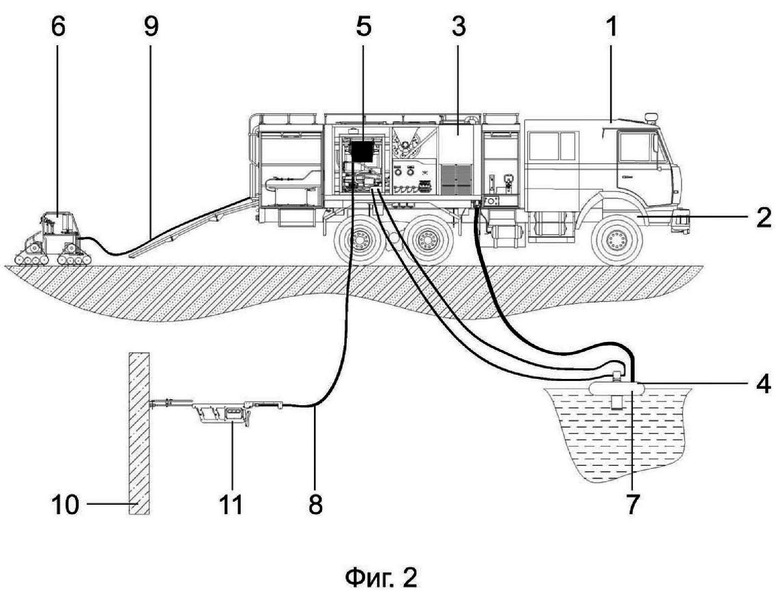
1. Мобильный роботизированный комплекс для ликвидации последствий чрезвычайных ситуаций и защиты путей эвакуации, состоящий из ходовой части на шасси повышенной проходимости и корпуса с отсеками для размещения функциональных модулей средств пожаротушения и забора воды, отличающийся тем, что содержит:
- не менее одного модуля забора воды из естественных водоисточников, выполненного с возможностью подачи забранной воды в бак, расположенный в корпусе комплекса;
- не менее одного модуля оператора, выполненного с возможностью гидроабразивной резки ограждающих и строительных конструкций, а также подачи тонкораспыленной воды или воздушно-механической пены из ручного ствола высокого давления;
- не менее одной роботизированной самоходной платформы, управляемой дистанционно и выполненной с возможностью круговой подачи тонкораспыленных огнетушащих веществ из баков, расположенных в корпусе комплекса.
2. Мобильный роботизированный комплекс по п. 1, отличающийся тем, что модуль забора воды выполнен в виде насосной системы, содержащей выносное устройство забора воды, выполненное в виде поплавковой платформы, снабженной гидродвигателем и водозаборным элементом с фильтром, при этом фильтр выполнен с возможностью отфильтровывания твердых тел, максимальный линейный размер которых превышает 10 мм, а водозаборный элемент выполнен с возможностью поверхностного забора воды.
3. Мобильный роботизированный комплекс по п. 1, отличающийся тем, что модуль оператора содержит коллектор, связанный гибким шлангом с инструментом оператора, при этом инструмент оператора снабжен клапаном, ручкой и соплом, а упомянутый коллектор связан трубопроводами с установленными в корпусе мобильного роботизированного комплекса: баком для абразива, баком для воды, баком для пенообразователя и насосом.
4. Мобильный роботизированный комплекс по п. 1, отличающийся тем, что роботизированная самоходная платформа выполнена в виде робототехнического устройства с возможностью круговой подачи тонкораспыленных огнетушащих веществ в очаг пожара, а также формирования регулируемой защитной зоны с пониженной температурой и осаждением продуктов горения.
5. Мобильный роботизированный комплекс по п. 4, отличающийся тем, что робототехническое устройство выполнено в форме отдельной самоходной гусеничной платформы, связанной с мобильным роботизированным комплексом посредством гибкого шланга, при этом робототехническое устройство содержит насос, а также распылительную головку с форсунками, установленную с возможностью свободного вращения; форсунки ориентированы таким образом, что при осуществлении распыления в головке возникает крутящий момент.
| Автомобиль пожарный | 2019 |
|
RU2723771C1 |
| Способ получения полиалкилсилоксанов | 1957 |
|
SU112637A1 |
| СПОСОБ ТУШЕНИЯ ПОЖАРА С ИСПОЛЬЗОВАНИЕМ ГРУППИРОВКИ РОБОТОТЕХНИЧЕСКИХ СРЕДСТВ | 2018 |
|
RU2680131C1 |
| JP 2003024462 A, 28.01.2003 | |||
| US 20040089458 A1, 13.05.2004 | |||
| JP 2007030831 A, 08.02.2007 | |||
| US 3169581 A1, 16.02.1965. | |||

