Изобретение относится к области цифровой обработки изображений и может быть использовано в системах мониторинга, контроля движения за воздушными и космическими объектами, при функционировании оптоэлектронных систем обнаружения и слежения за движущимися точечными или малоразмерными объектами.
Как правило, способы обработки временной последовательности изображений с целью выявления движущихся объектов, осуществляются с применением следующих операций. Вначале происходит выявление на изображениях предполагаемых движущихся объектов, среди которых присутствуют как истинные объекты, так и ложные, обусловленные шумами устройства формирования изображения. Вероятность обнаружения объектов и количество ложных объектов при этом определяются параметрами процедуры обработки отдельного изображения. В последовательности изображений с низкими значениями отношения сигнал/шум, как правило, количество ложных объектов ощутимо превышает количество истинных. Далее при обработке временной последовательности изображений начинается слежение за выявленными объектами с применением определенных операций слежения, целью которых является отнесение истинных предполагаемых объектов к движущимся объектам и отсеивание ложных предполагаемых объектов. В этой связи особую значимость приобретают критерии отнесения предполагаемого объекта, выявленного на изображении, к обнаруженным движущимся объектам, и критерии отсеивания ложных объектов, а также своевременное принятие решений по результатам применения указанных критериев в процессе обработки изображений. Если критерии отсеивания ложных объектов будут эффективны, то это обеспечит незначительное присутствие ложных объектов среди обнаруженных движущихся объектов. Возможность накопления в списке обнаруженных движущихся объектов истинных объектов, выявленных в результате обработки отдельного изображения, служит основанием для повышения вероятности обнаружения движущихся объектов в последовательности изображений.
Известен способ обработки последовательности изображений для обнаружения и слежения за воздушными объектами, изложенный в [Фисенко В.Т., Можейко В.И., Фисенко Т.Ю., Вилесов Л.Д., Федоров Д.А. Метод автоматического обнаружения и прослеживания многих малоразмерных объектов в условиях априорной неопределенности// Изв. Вузов. Приборостроение. 2014, т. 57, №10, с. 17-22], который принят за способ-аналог. Общими признаками способа-аналога с заявляемым способом являются обработка каждого изображения временной последовательности с выявлением предполагаемых объектов и оценкой их координат, формирование списка обнаруженных движущихся объектов, слежение за ними, включающее сопоставление объектов из указанного списка с предполагаемыми объектами, выявляемыми на текущих изображениях временной последовательности, обновление траекторных параметров объектов при подтверждении их обнаружения в результате сопоставления, удаление ложных объектов из списка обнаруженных движущихся объектов.
К причинам, препятствующим достижению указанного ниже технического результата при использовании способа-аналога, относятся следующие.
В способе-аналоге для отнесения предполагаемых объектов, выявляемых на изображениях временной последовательности, к списку обнаруженных движущихся объектов и для слежения за ними в исходной последовательности выделяют скользящую группу изображений, завершающуюся текущим изображением. Отнесение предполагаемого объекта на первом изображении выделенной группы к списку обнаруженных движущихся объектов осуществляют путем сопоставления с задаваемым пороговым значением среднеквадратического отклонения его координат и координат предполагаемых объектов на следующих изображениях выделенной группы от траектории движения объекта в предположении ее линейности. Предполагаемый объект на первом изображении считается стартовой точкой траектории. Остальные предполагаемые объекты, выявляемые на втором и последующих изображениях выделенной группы, снова участвуют в сопоставлении на следующей скользящей группе.
Для реализации процесса слежения за обнаруженными движущимися объектами в способе-аналоге требуется подтверждение обнаружения предполагаемого объекта в каждом изображении выделенной группы изображений во временной последовательности изображений. Это ужесточает требования к выявлению предполагаемого объекта на изображениях временной последовательности и требует обеспечения единичной вероятности обнаружения объекта, осуществляемого в результате обработки отдельного изображения. Меньшая вероятность обнаружения, свойственная обработке изображений с низким значением отношения сигнал/шум, создает предпосылки для отсутствия в выделенной группе изображений одного или нескольких предполагаемых объектов, соответствующих отслеживаемому объекту. Это существенно усложняет процесс слежения, делая его практически неосуществимым в условиях ограничений по времени обработки последовательности изображений. Даже допуская возможность реализации способа-аналога в условиях не единичной вероятности выявления объектов на отдельном изображении, оценка предельной вероятности обнаружения объектов во временной последовательности ограничивается значением вероятности обнаружения объектов, обеспечиваемым процедурой обработки отдельного изображения, поскольку в процедуре слежения способа-аналога заложена необходимость подтверждения обнаружения объектов на каждой вновь выделяемой группе во временной последовательности изображений с целью фильтрации ложных объектов в списке обнаруженных движущихся объектов.
Известен способ обработки последовательности изображений для обнаружения и слежения за воздушными объектами, описанный в [Патент РФ №2419150, дата приор. 10.03.2010, опубл. 20.05.2011, Бюл.№14], выбранный в качестве способа-прототипа. Общими признаками способа-прототипа с заявляемым способом являются обработка каждого изображения временной последовательности с выявлением предполагаемых объектов и оценкой их координат, формирование списка обнаруженных движущихся объектов, слежение за ними, включающее сопоставление объектов из указанного списка с предполагаемыми объектами, выявляемыми на текущих изображениях временной последовательности, выделение предполагаемого объекта, удовлетворяющего условию близости с отслеживаемым объектом, принятие решения о подтверждении обнаружения отслеживаемого объекта при выполнении условия близости и обновление его координат с учетом координат выделенного предполагаемого объекта, удаление ложных объектов из списка обнаруженных движущихся объектов.
В указанном способе список траекторных параметров ограничен координатами объекта, а сопоставление объектов из списка обнаруженных движущихся объектов с предполагаемыми объектами, выявляемыми на текущем изображении временной последовательности, осуществляют на основе сравнения координат обнаруженного движущегося объекта и ближайшего предполагаемого объекта на текущем изображении с заданием порогового значения расстояния между ними. При непревышении порогового значения обнаружение объектов из списка обнаруженных движущихся объектов на текущем изображении подтверждают и обновляют их координаты.
К причинам, препятствующим достижению указанного ниже технического результата при использовании указанного способа, относятся следующие.
После процедуры сопоставления объектов все предполагаемые объекты с каждого изображения временной последовательности, не прошедшие подтверждения обнаружения при сравнении с объектами из списка обнаруженных движущихся объектов, попадают в список обнаруженных движущихся объектов и начинают далее участвовать в процессе слежения. При этом в последовательности изображений с низкими значениями отношения сигнал/шум большинство из предполагаемых объектов в списке обнаруженных движущихся объектов являются ложными.
Для реализации процесса слежения в способе-прототипе во временной последовательности ограничивают число последовательных изображений при обработке изображений, на которых объекты считают обнаруженными и присутствующими в списке обнаруженных движущихся объектов, предполагая, что это сократит количество ложных объектов в списке обнаруженных движущихся объектов, уменьшит объем вычислений и облегчит процедуру слежения. Однако после обработки очередного изображения список обнаруженных движущихся объектов будет пополняться новыми ложными предполагаемыми объектами, и, следовательно, такой подход не обеспечит существенного снижения числа ложных объектов в списке обнаруженных движущихся объектов, а вызванная этим необходимость задавать жесткое условие в виде малого числа последовательных изображений, на которых объекты считают обнаруженными и присутствующими в списке обнаруженных движущихся объектов, не позволит повысить вероятность обнаружения объектов в процессе слежения за ними.
Сущность изобретения заключается в следующем.
Техническая проблема, которая возникает при решении задач обнаружения и слежения за движущимися объектами во временной последовательности изображений, состоит в том, что известные действия и условия их выполнения, используемые при обработке последовательности изображений не повышают вероятность обнаружения, определяемую результатом обработки отдельного изображения, в процессе слежения за объектами во временной последовательности изображений, а также не обеспечивают эффективное отсеивание ложных объектов. Прежде всего, это актуально при решении задачи обнаружения движущихся объектов во временной последовательности изображений с низким отношением сигнал/шум.
Технический результат, который достигается при осуществлении изобретения, заключается в повышении вероятности обнаружения движущихся объектов, определяемой результатом обработки отдельного изображения, в процессе слежения за объектами во временной последовательности изображений с обеспечением эффективного отсеивания ложных объектов. Способ успешно реализуется в условиях ограничений по времени обработки и объему проводимых при этом вычислений, а также при решении задачи обнаружения движущихся объектов во временной последовательности изображений с низким отношением сигнал/шум.
Указанный технический результат при осуществлении изобретения достигается тем, что в заявляемом способе обнаружения и слежения за движущимися объектами во временной последовательности изображений, включающем обработку каждого изображения временной последовательности с выявлением предполагаемых объектов и оценкой их координат, формирование списка обнаруженных движущихся объектов, слежение за объектами из списка обнаруженных движущихся объектов, включающее сопоставление объектов из указанного списка с предполагаемыми объектами, выявляемыми на текущих изображениях временной последовательности, выделение предполагаемого объекта, удовлетворяющего условию близости с отслеживаемым объектом, с последующим принятием решения о подтверждении обнаружения отслеживаемого объекта и обновление его координат с учетом координат выделенного предполагаемого объекта, удаление ложных объектов из списка обнаруженных движущихся объектов, в соответствии с заявляемым техническим решением задают количество последовательных изображений временной последовательности nP, по результатам обработки первого из nP изображений временной последовательности формируют буферный список потенциально обнаруженных движущихся объектов, в который переносят выявленные предполагаемые объекты, считая их потенциально обнаруженными движущимися объектами с числом обнаружений, равным 1, при обработке последующих изображений, начиная со второго и заканчивая последним из nP изображений, осуществляют слежение за объектами из буферного списка потенциально обнаруженных движущихся объектов, формирование списка обнаруженных движущихся объектов начинают по окончании обработки первых nP изображений временной последовательности на основе анализа объектов буферного списка, затем обрабатывают каждые последующие nР изображений временной последовательности, при этом осуществляют слежение за объектами из списка обнаруженных движущихся объектов с момента их появления в списке и последующее слежение за объектами буферного списка, а также продолжают формирование списка обнаруженных движущихся объектов на основе анализа объектов буферного списка, выполняемого после обработки последнего изображения из каждых последующих nP изображений, оставшиеся на текущем изображении по окончании слежения за всеми объектами буферного списка предполагаемые объекты переносят в буферный список, считая их потенциально обнаруженными движущимися объектами с числом обнаружений, равным 1, анализ объектов буферного списка осуществляют так, что объекты буферного списка, число обнаружений которых не менее значения параметра nT, где nT более 2 и менее nP, переносят в список обнаруженных движущихся объектов, объекты с числом обнаружений равным 1 из буферного списка удаляют, а число обнаружений оставшихся объектов буферного списка декрементируют, слежение за объектами из буферного списка потенциально обнаруженных движущихся объектов осуществляют так же, как и слежение за объектами из списка обнаруженных движущихся объектов, при этом после подтверждения обнаружения отслеживаемого объекта на текущем изображении число его обнаружений инкрементируют, выделенный же предполагаемый объект из дальнейшего рассмотрения исключают, траекторные параметры отслеживаемого объекта обновляют, при этом в траекторные параметры объектов из обоих списков включают, помимо координат объектов, оценки проекций скоростей объектов в системе координат изображения и временные промежутки между первым изображением и изображениями, соответствующими последним обнаружениям объектов, предполагаемые объекты, оставшиеся на текущем изображении по окончании слежения за всеми объектами из списка обнаруженных движущихся объектов, используют при слежении за объектами буферного списка, объекты из списка обнаруженных движущихся объектов, которые при слежении не обнаруживают на nF последовательных изображениях, где nF более 2nP, считают ложными.
Если при сопоставлении каждого объекта из буферного списка потенциально обнаруженных движущихся объектов или списка обнаруженных движущихся объектов с предполагаемыми объектами, выявляемыми на текущем изображении временной последовательности, вычисляют его прогнозируемые координаты на текущем изображении, при выделении предполагаемого объекта условие близости задают так, что расстояние между координатами выделенного предполагаемого объекта и прогнозируемыми координатами отслеживаемого объекта не превышает пороговое значение, то это характеризует вариант реализации способа в части, касающейся операций сопоставления объектов из буферного списка потенциально обнаруженных движущихся объектов или списка обнаруженных движущихся объектов с предполагаемыми объектами, выявляемыми на текущем изображении временной последовательности. При этом обеспечивается уменьшение объема проводимых вычислений, и, как следствие, возможность реализации в условиях ограничений по времени обработки последовательности изображений.
Если прогнозируемые на текущем изображении координаты для объектов из списка обнаруженных движущихся объектов или буферного списка вычисляют по траекторным параметрам указанных объектов с учетом числа их обнаружений так, что для объектов с числом обнаружений, равным 1, прогнозируемыми координатами считают значения координат объектов при их последнем обнаружении, а для объектов с числом обнаружений больше 1 прогнозируемые координаты получают суммированием значений координат объектов при их последнем обнаружении и смещений координат, рассчитываемых по оценкам проекций скоростей объектов и временных промежутков между текущим изображением и изображениями, соответствующими последним обнаружениям указанных объектов, то это характеризует вариант реализации способа в части, касающейся вычисления прогнозируемых на текущем изображении координат для объектов из списка обнаруженных движущихся объектов или буферного списка. При этом осуществляется дополнительное отсеивание ложных предполагаемых объектов.
Если пороговое значение расстояния между координатами выделенного предполагаемого объекта на текущем изображении и прогнозируемыми координатами отслеживаемого объекта из списка обнаруженных движущихся объектов или буферного списка задают исходя из числа обнаружений отслеживаемого объекта из этих списков, при этом пороговое значение для отслеживаемого объекта с числом обнаружений, равным 1, определяют задаваемым максимально допустимым смещением координат отслеживаемого объекта, обусловленным скоростью его движения, а для отслеживаемого объекта с числом обнаружений больше 1 пороговое значение определяют допустимым смещением координат, обусловленным суммой ошибки определения проекций скоростей отслеживаемого объекта в системе координат изображения и ошибки оценки координат при обработке каждого изображения, считая, что допустимые смещения координат от каждой из указанных ошибок не превышают линейного размера элемента изображения, то это характеризует вариант реализации способа в части, касающейся задания порогового значения расстояния между координатами выделенного предполагаемого объекта на текущем изображении и прогнозируемыми координатами отслеживаемого объекта из списка обнаруженных движущихся объектов или буферного списка. При этом осуществляется дополнительное отсеивание ложных предполагаемых объектов.
Совокупность вышеизложенных признаков изобретения связана причинно-следственной связью с техническим результатом изобретения.
Отличительной особенностью заявляемого способа является создание буферного списка потенциально обнаруженных движущихся объектов, который начинают формировать по результатам обработки первого из nP изображений временной последовательности, и в который переносят выявленные предполагаемые объекты, считая их потенциально обнаруженными движущимися объектами с числом обнаружений, равным 1. Следующей отличительной особенностью является осуществление слежения за объектами из буферного списка потенциально обнаруженных движущихся объектов при обработке последующих изображений, которое начинают непосредственно со второго изображения. Формирование списка обнаруженных движущихся объектов начинают по окончании обработки первых nP изображений временной последовательности на основе анализа объектов буферного списка, перенос объектов из буферного списка в список обнаруженных движущихся объектов повторяют аналогичным образом при обработке каждых последующих nP изображений.
Предлагаемый в изобретении анализ объектов буферного списка осуществляется так, что объекты буферного списка переносят в список обнаруженных движущихся объектов только при соблюдении вводимого параметра по числу обнаружений в пределах как первых nP, так и каждых последующих nP изображений. В противном случае объекты с числом обнаружений равным 1 из буферного списка удаляют, а число обнаружений оставшихся объектов буферного списка декрементируют. Таким образом, буферный список чистится после обработки каждых nP изображений. Такой подход к анализу объектов буферного списка, осуществляемый либо с переносом их в список обнаруженных движущихся объектов, либо с их удалением обеспечивает строгий отбор обнаруженных движущихся объектов из потенциально обнаруженных и значительно снижает вероятность попадания ложных объектов в список обнаруженных движущихся объектов.
В заявляемом способе вводят такую последовательность действий слежения за объектами, когда при обработке каждых nP изображений, последующих после первых nP изображений временной последовательности, вначале выполняют слежение за объектами из списка обнаруженных движущихся объектов и затем слежение за объектами буферного списка. Если в процессе слежения объекты обнаруживают на текущем изображении, то число их обнаружений инкрементируют, а сами сравниваемые предполагаемые объекты из дальнейшего рассмотрения исключают, оставшиеся на текущем изображении предполагаемые объекты служат для дальнейшего слежения за объектами буферного списка. Такая последовательность действий обеспечивает своевременное принятие решений о подтверждении обнаружения объектов из обоих списков на текущем изображении, отсеивает потенциально ложные объекты.
Как уже указывалось, процедура слежения за объектами из списка обнаруженных движущихся объектов в заявляемом способе проводится с момента появления их в списке, при этом объекты, которые при слежении не обнаруживают на nF последовательных изображениях, где nF более 2nP, считают ложными. Это достаточно нестрогое допущение позволяет накапливать объекты с низкой вероятностью обнаружения на отдельном изображении в списке обнаруженных движущихся объектов, создавая предпосылки для повышения вероятности обнаружения в процессе слежения. Параметр nP выбирают исходя из оптимальных условий обеспечения эффективного выполнения операций способа с учетом возможностей используемых вычислительных средств, принимая во внимание его влияние на вероятность переноса объектов из буферного списка в список обнаруженных движущихся объектов и допустимое количество ложных объектов в буферном списке.
Вводимые изобретением траекторные параметры объектов из обоих списков включают координаты объектов, оценки проекций скоростей объектов в системе координат изображения и временные промежутки между первым изображением и изображениями, соответствующими последним обнаружениям объектов. Такой выбор траекторных параметров с их обновлением при каждом подтверждении обнаружения объектов обеспечивает достаточно точное сопоставление с объектами на текущем изображении, снижает вероятность ошибочного сопоставления обнаруженных движущихся объектов с ложными объектами. Выбранный набор траекторных параметров позволяет выполнять их обновление по традиционно используемым рекуррентным формулам Калмановского типа, в результате чего уменьшается объем проводимых вычислений, появляется возможность реализации способа в условиях ограничений по времени обработки последовательности изображений.
В заявляемом способе при принятии решения о подтверждении обнаружения объектов как из списка обнаруженных движущихся объектов, так и буферного списка на текущем изображении сравнение с ближайшим предполагаемым объектом на текущем изображении выполняют с введением прогнозируемых координат обнаруженного движущегося объекта, а не координат, зафиксированных при его последнем обнаружении, как это делается в способе-прототипе. Также задание порогового значения расстояния между этими координатами в заявляемом способе связывают с числом обнаружений объектов этих списков и оценками их скоростей. Такой подход с введением прогнозируемых координат обнаруженного движущегося объекта, а также адаптивно вводимое пороговое значение расстояния, когда для элементов с числом обнаружений, равным 1, пороговое расстояние имеет более высокое значение и определяется скоростью движения объектов, а для элементов с большим количеством обнаружений пороговое расстояние имеет меньшее значение и связано с допустимыми ошибками оценок координат и скоростей объектов, повышает достоверность сопоставления объектов и содействует дополнительному отсеиванию ложных объектов.
Таким образом, совокупное действие всех признаков изобретения позволяет эффективно отсеивать ложные объекты и достичь высокой вероятности обнаружения движущихся объектов во временной последовательности изображений, которая не будет ограничиваться результатом обработки отдельного изображения. Действия заявляемого способа будут однозначно приводить к постепенному накоплению движущихся объектов в списке обнаруженных движущихся объектов. Способ успешно применим при решении задачи обнаружения движущихся объектов во временной последовательности изображений с низким отношением сигнал/шум. В этом случае, как показали проведенные оценки и результаты модельных экспериментов, вероятность внесения предполагаемых объектов в список обнаруженных движущихся объектов, являющаяся вероятностью обнаружения отслеживаемых объектов, будет неуклонно повышаться, приближаясь к высокому значению по мере обработки все большего количества изображений временной последовательности. Способ успешно реализуется в условиях ограничений по времени обработки последовательности изображений и объему проводимых при этом вычислений, благодаря вводимой совокупности траекторных параметров, обеспечивающей достаточно точное и вычислительно эффективное сопоставление с объектами на текущем изображении.
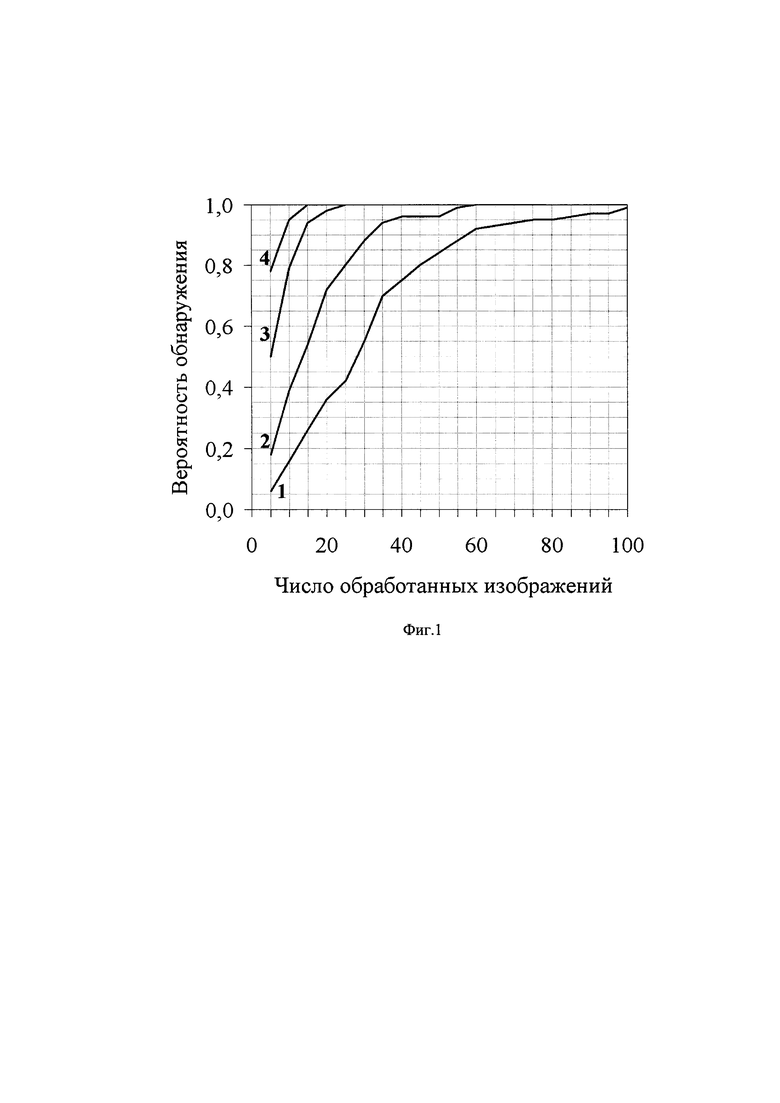
На фиг. 1 представлены экспериментальные зависимости вероятности обнаружения точечных объектов от числа обработанных изображений в последовательности модельных изображений для различных значений вероятностей обнаружений объектов на отдельном изображении (кривые 1-4). Значения вероятностей обнаружения объектов, определяемых результатами обработки отдельного изображения, составляли соответственно 0,22 (кривая 1), 0,30 (кривая 2), 0,51 (кривая 3), 0,72 (кривая 4). Соответствующие значения отношения сигнал/шум (ОСШ) модельных изображений были равны 4,5 (кривая 1), 5,0 (кривая 2), 6,0 (кривая 3), 7,0 (кривая 4). Использовались следующие параметры: nP =5, nF=30.
Для демонстрации возможностей способа был использован метод имитационного моделирования.
Перечень операций способа был реализован при обработке последовательности модельных изображений, для генерации которых использовался подход, изложенный в работе [Абакумова А.А., Малинова Т.П., Меденников П.А., Павлов Н.И. Программно-алгоритмический комплекс имитационного моделирования для исследования и разработки оптико-электронных систем наблюдения // Оптический журнал. 2019, т. 86, №8, с. 56-64]. При этом имитировалась система наблюдения, работающая в инфракрасном диапазоне спектра. Модельные изображения генерировались с учетом случайного характера регистрации приходящего излучения, реализации нормального случайного процесса для шума, обусловленного тепловым излучением элементов оптической системы, собственных шумов фотоприемной матрицы, включая остаточный геометрический шум, и шума считывания.
Были сгенерированы последовательности из 950 изображений с ОСШ равными 4,5; 5,0; 6,0 и 7,0. Общее число объектов для каждого значения ОСШ составляло 100, по 10 объектов на 10 последовательностях изображений. Обработка отдельных изображений с выявлением предполагаемых объектов и оценкой их координат выполнялась по способу, описанному в [Меденников П.А. Алгоритм обнаружения и определения координат точечного объекта // Оптический журнал. 2019, т. 86, №8, с. 65-69]. Параметры указанного алгоритма настраивались таким образом, что на моделируемом изображении размером 640×512 пикселей в среднем выделялось 50 ложных объектов. При этом вероятность обнаружения, определяемая результатом обработки отдельного изображения указанным способом, составляла 0,22; 0,30; 0,51; 0,72 для изображений с ОСШ 4,5; 5,0; 6,0 и 7,0, соответственно. Использовались следующие параметры: nP=5, nF=30.
По результатам обработки первого из nP=5 изображений каждой временной последовательности в буферный список потенциально обнаруженных движущихся объектов было перенесено 50 ложных объектов, а после обработки последнего, пятого, изображения в буферном списке накоплено 250 ложных объектов. В результате анализа буферного списка в нем оставалось 5 ложных объектов. Аналогичные показатели были достигнуты и при обработке каждых последующих 5 изображений каждой временной последовательности. В среднем на протяжении каждой последовательности изображений в буферном списке присутствовало порядка 130 ложных объектов. За все время слежения за объектами в 10 последовательностях из 950 изображений было зарегистрировано только 16 случаев перенесения ложных объектов из буферного списка в список обнаруженных движущихся объектов, где они находились на протяжении nF=30 изображений, после чего были удалены в соответствии с условием удаления ложных объектов из списка обнаруженных движущихся объектов.
Таким образом, вероятность присутствия ложных объектов в списке обнаруженных движущихся объектов оценивается как (16*30)/(10*950)≈0,05, что говорит об эффективном отсеивании ложных объектов.
Обеспечение повышения вероятности обнаружения движущихся объектов, определяемой результатом обработки отдельного изображения, в процессе слежения за объектами во временной последовательности изображений подтверждают результаты обработки моделируемых последовательностей изображений, иллюстрируемые фиг. 1. Так, из представленных на фиг. 1 зависимостей видно, что обнаружение с вероятностью 0,99 реализуется для объектов с ОСШ, равным 4,5, в результате обработки последовательности из 100 изображений, в то время как вероятность обнаружения, определяемая результатом обработки отдельного изображения, составляет для таких объектов 0,22. Аналогично, значение вероятности 0,99 было достигнуто для всех остальных значений вероятностей обнаружения, определяемых результатом обработки отдельного изображения. При этом, чем больше значение ОСШ изображений, тем при меньшем количестве обработанных изображений достигается результат. Так, для объектов с ОСШ, равным 5,0, обнаружение с вероятностью 0,99 реализуется в результате обработки последовательности из 55 изображений, в то время как вероятность обнаружения, определяемая результатом обработки отдельного изображения, составляет для таких объектов 0,30. Для объектов с ОСШ, равным 6,0, обнаружение с вероятностью 0,99 реализуется в результате обработки последовательности из 25 изображений при вероятности обнаружения, определяемой результатом обработки отдельного изображения, равной 0,51. Для объектов с ОСШ, равным 7,0, обнаружение с вероятностью 0,99 реализуется в результате обработки последовательности из 15 изображений при вероятности обнаружения, определяемой результатом обработки отдельного изображения, равной 0,72.
Приведенные результаты подтверждают основные достоинства и преимущества заявляемого способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ ТАНКЕРА И ОЦЕНИВАНИЯ ЕГО ТРАЕКТОРНЫХ ПАРАМЕТРОВ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ НА ФОНЕ ЗВЕЗДНОГО НЕБА | 2016 |
|
RU2624828C1 |
| Система сопровождения подвижных объектов на видео | 2022 |
|
RU2807953C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ДВИЖУЩИМИСЯ ОБЪЕКТАМИ РАДИОСТАНЦИЕЙ С РАДИОМЕТРОМ | 2022 |
|
RU2792087C1 |
| УСТРОЙСТВО ОБРАБОТКИ ВИДЕОИНФОРМАЦИИ СИСТЕМЫ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2484531C2 |
| СПОСОБ РАСПОЗНАВАНИЯ СИГНАЛА ИЗОБРАЖЕНИЙ | 2008 |
|
RU2413301C2 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2419150C1 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕЙ РАДИОЭЛЕКТРОННОЙ РАЗВЕДКИ ПО ПРИЗНАКАМ "СЛЕДА В АТМОСФЕРЕ" ЛЕТЯЩЕГО В СТРАТОСФЕРЕ С ГИПЕРЗВУКОВОЙ СКОРОСТЬЮ "РАДИОНЕЗАМЕТНОГО" ОБЪЕКТА | 2017 |
|
RU2689783C2 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО АВТОЗАХВАТА И АВТОСОПРОВОЖДЕНИЯ ДВИЖУЩИХСЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1992 |
|
RU2032916C1 |
| Корпоративный телемедицинский комплекс для предупреждения эпидемических чрезвычайных ситуаций | 2020 |
|
RU2735400C1 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ НА ОСНОВЕ ДАННЫХ ТРЕХМЕРНОГО ДАТЧИКА | 2016 |
|
RU2656711C2 |
Изобретение относится к способу обнаружения и слежения за движущимися объектами во временной последовательности изображений. Технический результат заключается в повышении точности обнаружения движущихся объектов и отсеивания ложных объектов в последовательности изображений. Способ включает обработку каждого изображения временной последовательности с выявлением предполагаемых объектов и оценкой их координат, формирование списка обнаруженных движущихся объектов, слежение за объектами из списка обнаруженных движущихся объектов, включающее сопоставление объектов из указанного списка с предполагаемыми объектами, выявляемыми на текущих изображениях временной последовательности, выделение предполагаемого объекта, удовлетворяющего условию близости с отслеживаемым объектом с последующим принятием решения о подтверждении обнаружения отслеживаемого объекта и обновление его координат с учетом координат выделенного предполагаемого объекта, удаление ложных объектов из списка обнаруженных движущихся объектов, при этом в способе задают количество последовательных изображений временной последовательности nP, по результатам обработки первого из nP изображений временной последовательности формируют буферный список потенциально обнаруженных движущихся объектов, в который переносят выявленные предполагаемые объекты, считая их потенциально обнаруженными движущимися объектами с числом обнаружений, равным 1, при обработке последующих изображений, начиная со второго и заканчивая последним из nP изображений, осуществляют слежение за объектами из буферного списка потенциально обнаруженных движущихся объектов, формирование списка обнаруженных движущихся объектов начинают по окончании обработки первых nP изображений временной последовательности на основе анализа объектов буферного списка, затем обрабатывают каждые последующие nP изображений временной последовательности, при этом осуществляют слежение за объектами из списка обнаруженных движущихся объектов с момента их появления в списке и последующее слежение за объектами буферного списка, а также продолжают формирование списка обнаруженных движущихся объектов на основе анализа объектов буферного списка, выполняемого после обработки последнего изображения из каждых последующих nP изображений, оставшиеся на текущем изображении по окончании слежения за всеми объектами буферного списка предполагаемые объекты переносят в буферный список, считая их потенциально обнаруженными движущимися объектами с числом обнаружений, равным 1, анализ объектов буферного списка осуществляют так, что объекты буферного списка, число обнаружений которых не менее значения параметра nT, где nT более 2 и менее nP, переносят в список обнаруженных движущихся объектов, объекты с числом обнаружений, равным 1, из буферного списка удаляют, а число обнаружений оставшихся объектов буферного списка декрементируют, слежение за объектами из буферного списка потенциально обнаруженных движущихся объектов осуществляют так же, как и слежение за объектами из списка обнаруженных движущихся объектов, при этом после подтверждения обнаружения отслеживаемого объекта на текущем изображении число его обнаружений инкрементируют, выделенный же предполагаемый объект из дальнейшего рассмотрения исключают, траекторные параметры отслеживаемого объекта обновляют, при этом в траекторные параметры объектов из обоих списков включают, помимо координат объектов, оценки проекций скоростей объектов в системе координат изображения и временные промежутки между первым изображением и изображениями, соответствующими последним обнаружениям объектов, предполагаемые объекты, оставшиеся на текущем изображении по окончании слежения за всеми объектами из списка обнаруженных движущихся объектов, используют при слежении за объектами буферного списка, объекты из списка обнаруженных движущихся объектов, которые при слежении не обнаруживают на nF последовательных изображениях, где nF более 2nP, считают ложными. 3 з.п. ф-лы, 1 ил.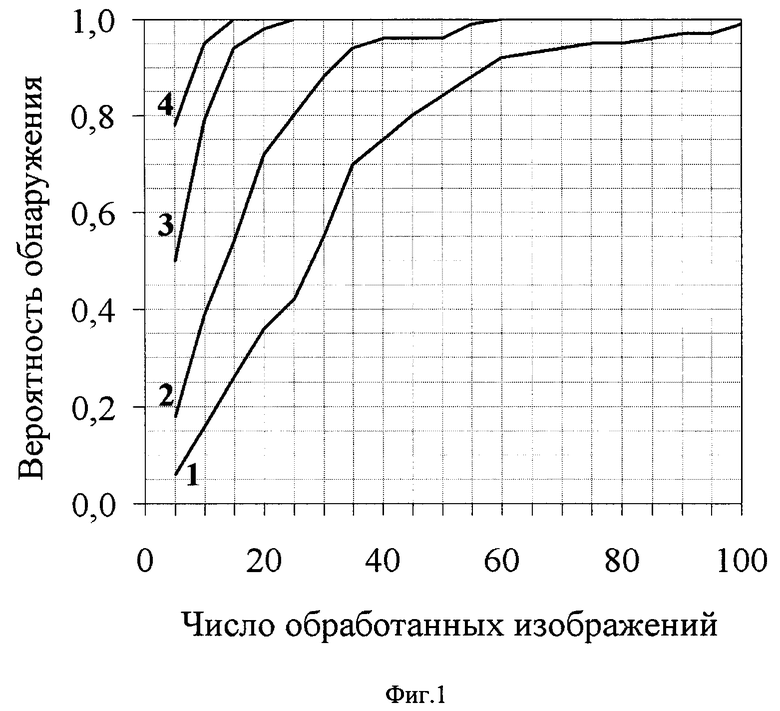
1. Способ обнаружения и слежения за движущимися объектами во временной последовательности изображений, включающий обработку каждого изображения временной последовательности с выявлением предполагаемых объектов и оценкой их координат, формирование списка обнаруженных движущихся объектов, слежение за объектами из списка обнаруженных движущихся объектов, включающее сопоставление объектов из указанного списка с предполагаемыми объектами, выявляемыми на текущих изображениях временной последовательности, выделение предполагаемого объекта, удовлетворяющего условию близости с отслеживаемым объектом с последующим принятием решения о подтверждении обнаружения отслеживаемого объекта и обновление его координат с учетом координат выделенного предполагаемого объекта, удаление ложных объектов из списка обнаруженных движущихся объектов, отличающийся тем, что задают количество последовательных изображений временной последовательности nP, по результатам обработки первого из nP изображений временной последовательности формируют буферный список потенциально обнаруженных движущихся объектов, в который переносят выявленные предполагаемые объекты, считая их потенциально обнаруженными движущимися объектами с числом обнаружений, равным 1, при обработке последующих изображений, начиная со второго и заканчивая последним из nP изображений, осуществляют слежение за объектами из буферного списка потенциально обнаруженных движущихся объектов, формирование списка обнаруженных движущихся объектов начинают по окончании обработки первых nP изображений временной последовательности на основе анализа объектов буферного списка, затем обрабатывают каждые последующие nP изображений временной последовательности, при этом осуществляют слежение за объектами из списка обнаруженных движущихся объектов с момента их появления в списке и последующее слежение за объектами буферного списка, а также продолжают формирование списка обнаруженных движущихся объектов на основе анализа объектов буферного списка, выполняемого после обработки последнего изображения из каждых последующих nP изображений, оставшиеся на текущем изображении по окончании слежения за всеми объектами буферного списка предполагаемые объекты переносят в буферный список, считая их потенциально обнаруженными движущимися объектами с числом обнаружений, равным 1, анализ объектов буферного списка осуществляют так, что объекты буферного списка, число обнаружений которых не менее значения параметра nT, где nT более 2 и менее nP, переносят в список обнаруженных движущихся объектов, объекты с числом обнаружений, равным 1, из буферного списка удаляют, а число обнаружений оставшихся объектов буферного списка декрементируют, слежение за объектами из буферного списка потенциально обнаруженных движущихся объектов осуществляют так же, как и слежение за объектами из списка обнаруженных движущихся объектов, при этом после подтверждения обнаружения отслеживаемого объекта на текущем изображении число его обнаружений инкрементируют, выделенный же предполагаемый объект из дальнейшего рассмотрения исключают, траекторные параметры отслеживаемого объекта обновляют, при этом в траекторные параметры объектов из обоих списков включают, помимо координат объектов, оценки проекций скоростей объектов в системе координат изображения и временные промежутки между первым изображением и изображениями, соответствующими последним обнаружениям объектов, предполагаемые объекты, оставшиеся на текущем изображении по окончании слежения за всеми объектами из списка обнаруженных движущихся объектов, используют при слежении за объектами буферного списка, объекты из списка обнаруженных движущихся объектов, которые при слежении не обнаруживают на nF последовательных изображениях, где nF более 2nP, считают ложными.
2. Способ по п. 1, отличающийся тем, что при сопоставлении каждого объекта из буферного списка потенциально обнаруженных движущихся объектов или списка обнаруженных движущихся объектов с предполагаемыми объектами, выявляемыми на текущем изображении временной последовательности, вычисляют его прогнозируемые координаты на текущем изображении, при выделении предполагаемого объекта условие близости задают так, что расстояние между координатами выделенного предполагаемого объекта и прогнозируемыми координатами отслеживаемого объекта не превышает пороговое значение.
3. Способ по п. 2, отличающийся тем, что прогнозируемые на текущем изображении координаты для объектов из списка обнаруженных движущихся объектов или буферного списка вычисляют по траекторным параметрам указанных объектов с учетом числа их обнаружений так, что для объектов с числом обнаружений, равным 1, прогнозируемыми координатами считают значения координат объектов при их последнем обнаружении, а для объектов с числом обнаружений больше 1 прогнозируемые координаты получают суммированием значений координат объектов при их последнем обнаружении и смещений координат, рассчитываемых по оценкам проекций скоростей объектов и временных промежутков между текущим изображением и изображениями, соответствующими последним обнаружениям указанных объектов.
4. Способ по пп. 2, 3, отличающийся тем, что пороговое значение расстояния между координатами выделенного предполагаемого объекта на текущем изображении и прогнозируемыми координатами отслеживаемого объекта из списка обнаруженных движущихся объектов или буферного списка задают исходя из числа обнаружений отслеживаемого объекта из этих списков, при этом пороговое значение для отслеживаемого объекта с числом обнаружений, равным 1, определяют задаваемым максимально допустимым смещением координат отслеживаемого объекта, обусловленным скоростью его движения, а для отслеживаемого объекта с числом обнаружений больше 1 пороговое значение определяют допустимым смещением координат, обусловленным суммой ошибки определения проекций скоростей отслеживаемого объекта в системе координат изображения и ошибки оценки координат при обработке каждого изображения, считая, что допустимые смещения координат от каждой из указанных ошибок не превышают линейного размера элемента изображения.
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2419150C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ ТАНКЕРА И ОЦЕНИВАНИЯ ЕГО ТРАЕКТОРНЫХ ПАРАМЕТРОВ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ НА ФОНЕ ЗВЕЗДНОГО НЕБА | 2016 |
|
RU2624828C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ КООРДИНАТНЫХ СМЕЩЕНИЙ ОБЪЕКТА СЛЕЖЕНИЯ В ПОСЛЕДОВАТЕЛЬНОСТИ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ | 2011 |
|
RU2460135C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ НА ИЗОБРАЖЕНИЯХ | 2020 |
|
RU2743224C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2016 |
|
RU2664411C2 |
| US 11069072 B2, 20.07.2021 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| US 5034986 A1, 23.07.1991 | |||
| CN 109087322 A, 25.12.2018. | |||

