Изобретение относится к радиолокации и может быть использовано для эффективного автозахвата и автосопровождения большого количества воздушных объектов в условиях ложных сигналов и помех.
Известен способ автозахвата и автосопровождения воздушных объектов состоящий в том, что все эхо-сигналы, отраженные от воздушных объектов и других предметов, вместе с сигналами помех преобразуют в приемном устройстве из аналоговой формы в более удобную для обработки цифровую форму и регистрируют в запоминающем устройстве, при этом отождествляют вновь получаемые сигналы с конкретным воздушным объектом путем группового сличения или отбора ближайшей отметки (1).
Недостатком известного способа автозахвата и автосопровождения является невысокая помехоустойчивость при повышении уровня шумовых сигналов, представляющих собой совокупность сигналов от посторонних предметов, шумов устройств измерения и преобразования и их случайных сбоев.
Наиболее близким по технической сущности к изобретению является устройство, в котором реализован способ, состоящий в том, что с помощью приемопередающей антенны сканируют некоторое пространство обзора и принимают отраженные от объектов и других уплотнений пространства радиолокационные эхо-сигналы, а также различного происхождения сигнала помех, которые затем с помощью системы первичной обработки (усилительный приемник, преобразователь сигналов в видеоимпульсы и блок формирования отметов от целей), усиливают и преобразуют в видеоимпульсы, из которых затем селектируют и формируют возможные отметки о целях. Далее в известном устройстве осуществляют запоминание в цифровой форме отметок и траекторий целей, сопоставляют в блоке сопоставления отметок и траекторий текущих и накопленных значений и вычисляют вероятность возможных координат положения для каждой цели и вероятность того, что эти координаты являются последним положением данной цели, фильтруют параметры траектории, запоминают в памяти блока сопровождения и дисплея прошлые положения целей и информацию о фиксированных объектах, которую вызывают на его экран по мере необходимости (2).
К недостаткам известного устройства относится следующее. В нем определяют для каждой отметки измерения вероятность того, что она относится к каждой из сопровождаемых траекторий, осуществляют выбор наилучшего (наиболее вероятного) взаимно однозначного соответствия отметок и траекторий в каждом текущем обзоре, после чего выполняют обновление оценок текущих параметров траекторий. Таким образом, в известном устройстве из возможных вариантов продолжения траектории разными отметками-измерениями в каждом обзоре оставляют не более одного варианта, что приводит к увеличению вероятности обрыва сопровождения или захвата ложной траектории в сложной помеховой радиолокационной обстановке.
Целью изобретения является повышение помехоустойчивости автозахвата и автосопровождения траекторий многих движущихся воздушных объектов (целей) в условиях возможного поступления ложных отметок измерений, пропусков сигналов-измерений при наличии случайных ошибок измерений.
Поставленная цель достигается также тем, что в устройство автозахвата и автосопровождения воздушных объектов, содержащее последовательно соединенные антенну, усилитель радиосигналов, преобразователь радиосигналов в видеоимпульсы, видеоусилитель, блок формирования отметок от целей, запоминающее устройство отметок от целей и дисплей, введены запоминающее устройство списков ветвящихся траекторий и отметок целей, запоминающее устройство (ЗУ) вариантов траекторий, блок сопоставления, блок регистрации начальных точек новых траекторий и блок обновления вариантов траекторий.
Сущность изобретения.
В отличие от прототипа в предлагаемом способе с помощью ЗУ отметок, ЗУ списков ветвящихся вариантов траекторий и отметок целей ЗУ вариантов траекторий, блока сопоставления, блока регистрации начальных точек новых траекторий и блока обновления вариантов траекторий реализован принцип рекуррентного последовательного перебора вариантов (ветвление вариантов и, что самое главное, сокращение перебора) с применением динамического программирования Беллмана, легко осуществляемого с помощью несложного вычислителя блока сопоставления (или компьютера с весьма скромным быстродействием). Данное предложение позволяет осуществлять ветвление, перебор и выбор наиболее правдоподобной совокупности вариантов построения траекторий, причем количество запоминаемых и рассчитываемых вариантов не разрастается с ростом числа обзоров (даже в худшем случае плотных группировок воздушных объектов и высокой плотности поступления помеховых сигналов) и может превышать число траекторий всего лишь и не более чем в 2-3 раза, что позволяет осуществить данный способ при весьма скромных требованиях к объему памяти и быстродействию при повышении помехоустойчивости автозахвата и автосопровождения.
На чертеже представлена структурная схема заявленного устройства.
Устройство содержит антенну 1, систему первичной обработки 2, содержащую в свою очередь усилитель 3 радиосигналов, преобразователь 4, радиосигналов в видеоимпульсы, видеоусилитель 5, блок 6 формирования отметок от цели, ЗУ 7 отметок, ЗУ 8 списков, ветвящихся вариантов траекторий и отметок целей, ЗУ 9 вариантов траекторий, блок 10 сопоставления, содержащий в свою очередь блок 11 вычисления, блок 12 выбора наиболее правдоподобной совокупности и блок 13 сравнения, блок 14 регистрации начальных точек новых траекторий, блок 15 обновления вариантов траекторий и дисплей 16.
Устройство работает следующим образом.
Антенна 1 сканирует некоторую область обзора и принимает радиолокационные эхо-сигналы, отраженные от воздушных объектов (целей), а также сигналы помех, которые поступают на вход системы 2 первичной обработки, которая вырабатывает из всего общего потока сигналов отдельные отметки-измерения, содержащие, например, закодированные в цифровой форме значения дальности, азимута, угла места и радиальной скорости цели в известный момент времени. При этом, естественно, из-за внутренних шумов антенны 1 и устройств системы 2 первичной обработки возможно формирование ею ложных отметок, не соответствующих никакой цели.
Значения отметок, полученных на одном обзоре (на одном обороте антенны 1 вокруг своей оси), регистрируются упорядоченно (как правило по кольцевому циклическому способу) в ЗУ 7 отметок, а затем они переписываются в ЗУ 8 связанных списков. При этом в один список включаются отметки, которые находятся в одной области (части) пространства и могут относиться к одной группе целей.
Данные ЗУ 8 затем обрабатываются в блоке 10 сопоставления с участием ЗУ 9 вариантов траекторий.
В ЗУ 9 вариантов траекторий в начальный период работы (например, на первом обзоре, при первом поступлении точек текущих отметок данных нет. Они появляются после обработки первых отметок в блоке 10 сопоставления и представляют собой информацию в виде кодов о:
полученных оценок текущих параметров траектории и их точностных характеристик;
моменте времени последнего обновления параметров траектории;
результатах измерения, использованных для обновления;
показателе качества вариантов траектории, представляющем собой логарифм отношения правдоподобия гипотез об истинности или ложности варианта построения траектории, который вычисляется с использованием отклонений, полученных результатов измерений от их ожидаемых значений.
В блоке 10 осуществляется сопоставление полученных в последнем (текущем) обзоре отметок-измерений и пучков вариантов траекторий. Для этого вначале с помощью блока 11 вычисления определяется "обобщенное расстояние" полученного измерения от его значения, ожидаемого на основе экстраполяции рассматриваемого варианта траектории на момент времени измерения. Это осуществляется следующим образом.
Пусть j обозначает порядковый номер отметки-измерения в списке отметок текущего обзора, i номер пучка вариантов, К номер варианта в пучке; Rоб2 (i, k, j) "обобщенное расстояние" j-й отметки-измерения от ожидаемого значения измерения для К-го варианта из i-го пучка.
Приращение показателя качества при присоединении j-й отметки-измерения к К-му варианту i-го пучка вычисляется по формуле
ΔS(i,k,j) 






 (1)
(1)
где l размерность вектора-измерения;
Q коэффициент увеличения дисперсии отклонения отметки-измерения от ее ожидаемого значения в случае ложного построения траектории (по сравнению с дисперсией отклонения в случае истинной траектории).
Можно принять Q 5-7; "обобщенное расстояние",
R (ζq- ζ
(ζq- ζ
(2) где ζq (q 1,l) компоненты вектора-измерения,
ζqэ значение, ожидаемое на основе экстраполяции траектории на момент времени измерения, bpq
bpq - матрица, обратная к матрице ковариаций отклонений результатов измерений от их ожидаемых экстраполированных значений в случае истинной траектории.
- матрица, обратная к матрице ковариаций отклонений результатов измерений от их ожидаемых экстраполированных значений в случае истинной траектории.
Для каждой j-й отметки-измерения, полученной в текущем n-м обзоре и каждого i-го пучка определяется показатель качества S(i, j, n) лучшего варианта траектории, который может быть получен при соотношении j-й отметки к i-му пучку вариантов
S(i,j,n) max{S(i,k,n-1)+ ΔS(i,k,j)} (3)
к
Полученные значения S(i,j,n) запоминаются в виде прямоугольной матрицы (j1,ntt, где ntt число отметок-измерений в списке отметок, полученных в текущем n-м обзоре; i 1, nbs, где nbs число пучков вариантов). Запоминаются также значения признака попадания или непопадания j-й отметки в область возможных результатов измерений для рассматриваемого варианта траектории; обозначим его, скажем K(i,j,n), запоминается номер K*(i,j,n) лучшего варианта из i-го пучка для продолжения его j-й отметкой-измерением, на которой достигается максимум в формуле (3).
Затем по матрице S(i,j,n) (i1,nbs; j θ 1,ntt) решается "задача о назначении".
Определяют значения Xij, равные нулю или единице, такие, что
 S(i,j,n) Xij= max
S(i,j,n) Xij= max
(4)
при условии  Xij≅ 1;
Xij≅ 1;  Xij≅ 1
Xij≅ 1
 Xij= min (ntt, nbs)
Xij= min (ntt, nbs)
Найденные с помощью блока 12 значения Xij 1 определяют выбор наиболее правдоподобной совокупности вариантов и наиболее правдоподобное соответствие точек-измерений и вариантов
Значение S(i, j, n) для выбранного элемента (т.е. при Xij 1) с помощью блока 13 сравнивается с порогами
B < S(i,j,n) < A.
При превышении верхнего порога принимается решение об истинности варианта траектории (происходит обнаружение траектории), при S(i,j,n) < B вариант принимается за ложный и стирается в ЗУ 9, а точка-измерение ТТj передается в блок 14, где осуществляется ее запись в "формулятор варианта траектории" как начальной точки новой траектории, и затем этот формуляр запоминается в ЗУ 9 (как пучок, состоящий из одного варианта). Эти действия по записи новых начальных точек траекторий выполняются также в случае, если Xi,j 1, но отсутствует признак попадания отметки TTj в область возможных значений (в строб) к сопоставляемому ей варианту траектории из i-го пучка с номером K*(i,j) или если Xij 1, но S(i,j,n) < B
Если S(i, j, n) > A (при Xij 1), когда в i-м пучке оставляется единственный вариант K*(i,j) обновленный измерением TTj; в его формуляр записывается "признак истинности", который сохраняется и в дальнейшем, даже если S(i,j) станет меньше А (но тогда траектория получает признак "неустойчивая").
Обновление варианта траектории с номером K*(i,j) измерением TTjосуществляется в блоке 15 с использованием рекурентных формул калмановской фильтрации (вычисление матрицы bpq в формуле (1) и обобщенного расстояния Rоб2 охватывается также этими формулами; при этом в формуляторе варианта траектории в качестве точностных характеристик полученных оценок текущих параметров траектории запоминаются элементы матрицы ковариаций, пересчитываемые в процессе калмановской фильтрации.
Обновленный формуляр траектории запоминается в ЗУ 9.
При Xij 1 и Sij ≥A отметка TTj получает "признак привязки" с тем, чтобы ею не обновлялись другие варианты траекторий.
Если Xij 1, но B < S(i,j,n) < A, тогда обновляются путем фильтрации все варианты K*(i,j) (при j 1,ntt) из i-го пучка, если только точка TTj попадает в строб к варианту K*(i,j) и не имеет признака привязки и признака "начала новой траектории". При непопадании ни одной точки-измерения в строб к варианту или при необновлении его ни одной точкой, он получает отрицательное приращение показателя качества, равное
ΔS  ln Q +
ln Q +  1
1 R
R
Заявленное устройство, обеспечивая по сравнению с прототипом уменьшение вероятности обрыва сопровождения реальных и/или захвата ложных воздушных объектов в сложной помеховой обстановке, обладает более высокой помехоустойчивостью радиолокационного обнаружения и сопровождения воздушных объектов при относительно меньших затратах памяти и меньших требованиях к устройству по быстродействию.
Использование: автозахват и автосопровождение воздушных объектов. Сушность: устройство содержит антенну 1, систему первичной обработки 2, включающую усилитель радиосигналов 3, преобразователь радиосигналов в видеоимпульсы 4, видеоусилитель 5 и блок формирования отметок от целей 6, запоминающее устройство отметок от цепей 7, запоминающее устройство списков ветвящихся вариантов траекторий и отметок целей 8, запоминающее устройство вариантов троекторий 9, блок сопоставления 10, включающий блок вычисления матриц сопоставления отметок и ветвящихся вариантов траекторий 11, блок выбора наиболее правдоподобной совокупности траектории 12 и блок сравнения 13, блок регистрации начальных точек новых траекторий 14, блок обновления вариантов траекторий 15, дисплей 16. 1 ил.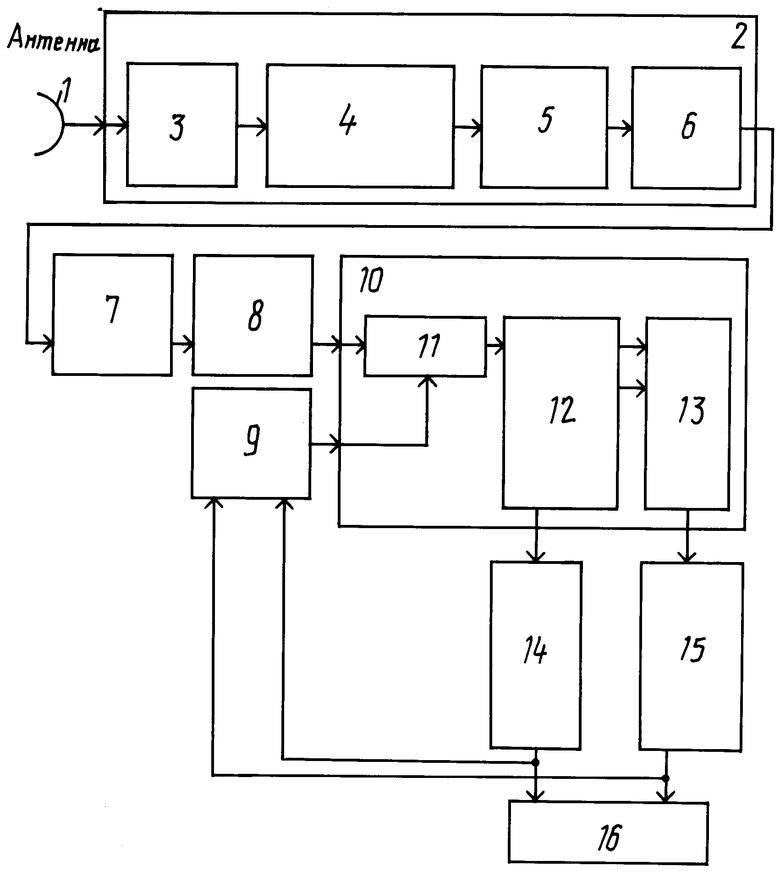
УСТРОЙСТВО РАДИОЛОКАЦИОННОГО АВТОЗАХВАТА И АВТОСОПРОВОЖДЕНИЯ ДВИЖУЩИХСЯ ВОЗДУШНЫХ ОБЪЕКТОВ, содержащее последовательно соединенные антенну, усилитель радиосигналов, преобразователь радиосигналов в видеоимпульсы, видеоусилитель, блок формирования отметок от целей и запоминающее устройство отметок от целей, дисплей, отличающееся тем, что введены запоминающее устройство списков ветвящихся вариантов траекторий и отметок от целей, запоминающее устройство вариантов траекторий, блок сопоставления, блок регистрации начальных точек новых траекторий и блок обновления вариантов траекторий, при этом выход запоминающего устройства отметок от целей соединен с входом запоминающего устройства списков ветвящихся вариантов траекторий и отметок целей, выход которого соединен с первым входом блока сопоставления, второй вход которого соединен с выходом запоминающего устройства вариантов траекторий, первый и второй выходы блока сопоставления соединены соответственно с входами блока регистрации начальных точек новых траекторий и блока обновления вариантов траекторий, выходы которых соединены с соответствующими входами дисплея и запоминающего устройства вариантов траекторий, а блок сопоставления содержит блок вычисления матриц сопоставления отметок и ветвящихся вариантов траекторий, входы которого являются первым и вторым входами блока сопоставления, а выход соединен с входом блока выбора наиболее правдоподобной совокупности траекторий, первый выход которого является первым выходом блока сопоставления, второй и третий выходы блока выбора наиболее правдоподобной совокупности траекторий соединены с соответствующими входами блока сравнения, выход которого является вторым выходом блока сопоставления.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ СИЛЬФОНОВ | 0 |
|
SU323688A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

