Изобретение относится к области транспортного машиностроения, конкретно к мобильным робототехническим комплексам для дистанционной работы в различных условиях.
Мобильный автономный робототехнический комплекс предназначен для выполнения разнообразных военных, сельскохозяйственных, коммунальных задач в различных условиях на дорогах с твердым покрытием, грунтовых и заснеженных поверхностях. На поле боя предполагается разведка, перевозка личного снаряжения пехотинцев, разминирование, буксировка легких грузов. Возможно использование комплекса для нужд сельского хозяйства для внесения удобрений, опрыскивания, перевозки грузов и для коммунальных служб для уборки снега, мусора, разбрызгивания реагентов и т.п.
Наиболее близким к предлагаемому техническим решением по назначению и совокупности конструктивных признаков (ближайшим аналогом, прототипом) является малогабаритная гусеничная роботизированная платформа «Скорпион» конструкторского бюро «Эксодус», предназначенная для выполнения функций передвижения, транспортировки полезного груза в труднодоступные места и исследовательских задач [URL: https://exodus-truck.ru/product/gusenichnaja-platforma/].
Прототип содержит корпус, ходовую часть с гусеничным движителем, силовую установку, средства управления движением, оборудование и средства связи и хранения информации.
Однако данное техническое решение имеет два существенных недостатка: во-первых, платформа имеет только гусеничный движитель, тогда как на дорогах с твердым покрытием или в условиях складских помещений предпочтительно применение колесного движителя для уменьшения сопротивления движению и снижения потерь мощности; во-вторых, корпус платформы не предусматривает его использование на плаву и на обводненных грунтах, что снижает ее эксплуатационные возможности.
Известно мобильное шасси автоматизированного робототехнического комплекса, содержащее корпус, силовую и трансмиссионную установки, аппаратуру и средства управления движением, приборы и устройства для сбора обработки и передачи информации о природных процессах, другие устройства средств хранения информации, связи и управления, а также специальные присоединительные блоки и набор
движителей: колесный, гусеничный и роторно-винтовой (патент на полезную модель RU 155756 U1). Но данное техническое решение имеет существенный недостаток: движители являются съемными, а для их установки требуется наличие специального инструмента.
Заявляемое изобретение направлено на достижение технического результата в виде повышения эффективности и эксплуатационных качеств мобильных малогабаритных робототехнических платформ, предназначенных для выполнения разнообразных военных, сельскохозяйственных, коммунальных задач в различных условиях.
Технический результат достигается тем, ходовая часть выполнена колесно-гусеничной за счет того, что опорные катки гусеничного движителя выполнены в виде колесных движителей, и при этом привод на колесный движитель осуществляется посредством электромагнитных муфт и цепных передач, с возможностью автоматического перехода с гусеничного движителя на колесный при снятии гусеничных лент.
Сущность изобретения поясняется чертежами, где на Фиг. 1 изображена кинематическая схема шасси с указанием основных элементов, вид в плане. Фиг. 2 подробно поясняет устройство электромагнитной муфты, предназначенной для передачи мощности при колесном ходе.
Проблема решается также за счет дополнительных совокупностей конструктивных признаков, в рамках указанных основных:
- шасси может быть оснащено электромагнитными муфтами, расположенными на одном валу с силовой установкой, а цепные передачи расположены на осях ведущих колес движителя;
- при предыдущей совокупности признаков электромагнитная муфта каждого борта может быть соединена с ведущей звездочкой цепной передачи винтовым соединением с передачей мощности от силовой установки на ведущую звездочку с помощью шлицевого соединения, при этом фиксация муфты в определенном положении осуществляется посредством шарикового фиксатора;
- в составе шасси цепные передачи могут быть расположены в плане в шахматном порядке;
- корпус шасси может быть выполнен герметичным, с возможностью передвижения на плаву за счет перематывания гусениц.
Шасси робототехнического комплекса состоит из герметичного корпуса 1, силовой установки 2, состоящей из мотор-редуктора и ведущего колеса 3 с цевочным зацеплением с резиновой гусеницей, электромагнитной муфты 4, цепных передач 5, предназначенных для передачи мощности на ведущие колеса при снятых гусеницах, колес с пневматическими шинами 6.
Для осуществления перехода с гусеничного движителя на колесный снимают гусеничные ленты с обоих бортов шасси и задействуют электромагнитные муфты.
Конструкция муфты применительно к одному борту шасси поясняется на Фиг. 2. Муфта установлена на вал силового мотор-редуктора 8 и состоит из магнитной катушки 9 и корпуса 12, к которому на болтовых соединениях прикреплена звездочка цепной передачи 13. Корпус установлен на валу мотор-редуктора на роликовом игольчатом подшипнике качения 15.
Принцип работы муфты заключается в следующем. Магнитное поле, генерируемое в катушке 9 вызывает перемещение корпуса 12 вправо, при этом внутренние шлицы звездочки 13 и внешние шлицы втулки мотор-редуктора 14 входят в зацепление. Благодаря этому мощность передается на звездочку 13, а далее через цепную передачу на приводные колеса. Самопроизвольное перемещение муфты влево блокируется шариковым фиксатором, состоящим из шарика 10 и пружины 11.
Заявляемое шасси робототехнического комплекса работает следующим образом.
Силовая установка 2 приводит во вращение ведущее колесо 3, закрепленное на нем. Аналогично приводится во вращение ведущее колесо другого борта шасси. За счет этого происходит перематывание гусениц. При этом угловые скорости вращения ведущих колес равны, и шасси движется прямолинейно. Изменение направления движения происходит с помощью силового способа поворота за счет рассогласования угловых скоростей бортов.
Для перехода на колесный движитель снимают гусеницы и задействуют электромагнитные муфты 4 на обоих бортах шасси. При этом мощность с силовой установки 2 через цепные передачи 5 будет передаваться на вал 7 с установленными на нем колесами с пневматическими шинами 6, которые в гусеничном движителе выполняли роль опорных катков. Через остальные цепные передачи вращение передается на оставшиеся оси. Поворот шасси с колесным движителем также осуществляется силовым способом.
За счет герметичности корпуса и положительной плавучести комплекса (транспортного средства), шасси способно двигаться на плаву посредством перематывания гусениц.
При использовании гусеничного движителя робототехническое шасси может передвигаться по грунтовым, заснеженным поверхностям, при этом имея среднее удельное давление на грунт 20 кПа при массе 800 кг.
При использовании колесного движителя шасси может передвигаться по дорогам с твердым покрытием и в условиях складских помещений.
Заявляемое колесно-гусеничное шасси мобильного робототехнического комплекса не требует применения специальных сложных технологий производства и специальных материалов. Оно может быть изготовлено с помощью известных технических средств и обеспечивать технический результат. Отсюда следует, что шасси обладает промышленной применимостью.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОДВИЖУЩАЯСЯ ПЛАТФОРМА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2015 |
|
RU2583254C1 |
| Колёсно-гусеничное шасси транспортного средства повышенной проходимости | 2022 |
|
RU2787607C1 |
| Мобильный робототехнический комплекс | 2015 |
|
RU2612115C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| МАЛОГАБАРИТНЫЙ ВСЕСЕЗОННЫЙ УНИВЕРСАЛЬНЫЙ ГУСЕНИЧНЫЙ ВЕЗДЕХОД | 2013 |
|
RU2534202C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 2017 |
|
RU2643059C1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2002 |
|
RU2268839C9 |
| МАШИНА | 2009 |
|
RU2401762C1 |


Изобретение относится к мобильным робототехническим комплексам для дистанционной работы в различных условиях. Мобильное шасси автономного робототехнического комплекса состоит из корпуса, ходовой части, силовой установки и средств управления движением, оборудования и средств хранения информации и связи. Опорные катки гусеничного движителя выполнены в виде колесных движителей. Привод на колесный движитель осуществляется посредством электромагнитных муфт и цепных передач с возможностью автоматического перехода с гусеничного движителя на колесный при снятии гусеничных лент. Достигается повышение эксплуатационных качеств мобильных малогабаритных робототехнических платформ. 4 з.п. ф-лы, 2 ил.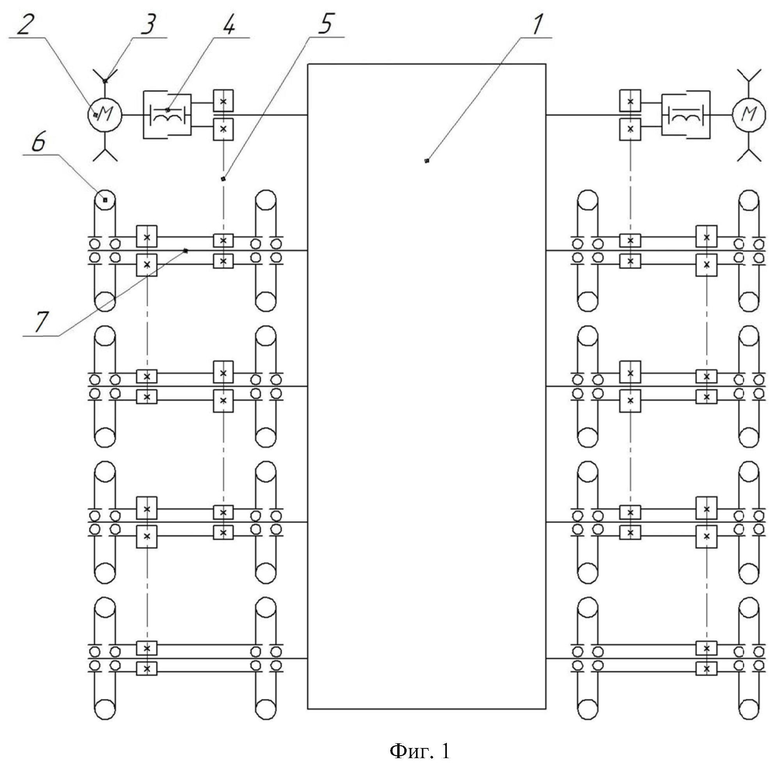
1. Мобильное колесно-гусеничное шасси автономного робототехнического комплекса, содержащее корпус, ходовую часть с гусеничным движителем, силовую установку, средства управления движением, оборудование и средства связи и хранения информации, отличающееся тем, что опорные катки гусеничного движителя выполнены в виде колесных движителей, и при этом привод на колесный движитель осуществляется посредством электромагнитных муфт и цепных передач с возможностью автоматического перехода с гусеничного движителя на колесный при снятии гусеничных лент.
2. Шасси по п. 1, отличающееся тем, что электромагнитные муфты расположены на одном валу с силовой установкой, а цепные передачи расположены на осях ведущих колес движителя.
3. Шасси по п. 1, отличающееся тем, что каждая электромагнитная муфта соединяется с ведущей звездочкой цепной передачи с передачей мощности от силовой установки на ведущую звездочку с помощью шлицевого соединения, при этом фиксация муфты в определенном положении осуществляется посредством шарикового фиксатора.
4. Шасси по п. 1, отличающееся тем, что цепные передачи расположены в плане в шахматном порядке.
5. Шасси по п. 1, отличающееся тем, что корпус выполнен герметичным с возможностью передвижения на плаву за счет перематывания гусениц.
| 0 |
|
SU155756A1 | |
| МОБИЛЬНОЕ ЭНЕРГЕТИЧЕСКОЕ СРЕДСТВО | 2017 |
|
RU2661268C1 |
| КОМБИХОД | 2007 |
|
RU2347710C1 |
| ПРИВОД ГУСЕНИЧНОГО ДВИЖИТЕЛЯ БЫСТРОХОДНОЙ МАШИНЫ | 1990 |
|
RU2033937C1 |
| Реактор жидкофазного окисления сточных вод | 1989 |
|
SU1673541A1 |

