Изобретение относится к области морского судоходства и может быть использовано на плавающих объектах - в спасательных плотах, спасательных шлюпках и маломерных судах.
Известен плавучий якорь [Патент РФ №2326018 С1 МПК В63В 21/48 (2006.01) авторов Бойко А.В., Прокофьев В.В., Чикаренко В.Г.], отличающийся тем, что его упругая основа, состоящая из кольчужного пластыря, обшитого парусиной и закрепленного в подводной части носовой оконечности судна, при взаимодействии с потоком жидкости на волнении создает гидродинамическую силу, вертикальная составляющая которой N уменьшает амплитуду качки, а горизонтальная составляющая Т создает дополнительную тяговую силу.
Известен волнодвижитель парус-решетка [Патент РФ №2540156 МПК В63Н 19/02 авторов Архангельский Е.А., Ерошин В.А., Размыслов В.Ф., Прокофьев В.В., Чикаренко В.Г., Яковлев Е.А.], представляющий собой набор коротких по длине подводных парусов, закрепленных на кронштейне в районе носовой оконечности судна, при качке которого и взаимодействии набегающего потока с парусами на последних возникает тяговая сила Т, которая и движет корабль.
Известен также гидродинамический якорь [Патент РФ №2751044 МПК В63Н 19/02, F03B 13/12 (2006/01) авторов Сичкарев В.И., Черенович А.С. Кузьмин В.В.], соединенный гибкой связью с плавающим объектом и содержащий подводные крылья, раму с центральным и двумя боковыми килями, соединенных между собой двумя парами нижних и двумя верхними поперечными связями. На передние связи нижних пар связей установлены подводные крылья с возможностью ограниченного поворота вокруг этих связей. Задние поперечные связи нижних пар ограничивают возможность поворота крыльев вниз, а верхние поперечные связи ограничивают возможность поворота крыльев вверх. Гибкая связь, соединяющая раму с плавающим объектом, закреплена на центральном киле рамы и соединена оттяжками с боковыми килями. Связь обеспечивает расположение в воде плоскости рамы под необходимым углом атаки.
Этот аналог выбран в качестве прототипа заявляемого изобретения.
У выбранного прототипа имеются два недостатка.
Первый недостаток - большая масса подводных крыльев. Это приводит к возникновению двух нежелательных явлений. В начале подъема гидродинамического якоря из его нижнего положения в верхнее происходит инерционная задержка с возвращением крыльев из поднятого положения в рабочее. В начале погружения гидродинамического якоря из его верхнего положения возникает инерционная задержка в развороте подводных крыльев из рабочего положения в поднятое. В результате образуется некоторый гидродинамический люфт в перемещениях гидродинамического якоря, на величину которого уменьшается рабочее перемещение с возникновением полезных гидродинамических сил гидродинамического якоря.
Второй недостаток - подводные крылья в фазе подъема и опускания должны иметь горизонтальную составляющую гидродинамической силы, направленную в одну и ту же сторону - навстречу дрейфу. Но при этом относительно профиля крыла - это разные направления. В фазе подъема гидродинамического якоря (основная рабочая фаза) гидродинамическая сила направлена навстречу дрейфу и вниз, в сторону подсасывающей поверхности несимметричного профиля крыла. В фазе опускания (подготовительная фаза) гидродинамическая сила направлена навстречу дрейфу и вверх, в сторону нагнетающей поверхности несимметричного крыла, которая в подготовительной фазе, таким образом, становится подсасывающей. При таком обтекании существенно снижается гидродинамическое качество твердотельного крыла.
Замена несимметричного профиля крыла на симметричный устраняет этот недостаток, но гидродинамическое качество крыла симметричного профиля в рабочей фазе ниже, чем у несимметричного профиля.
Заявляемое изобретение нацелено на устранение отмеченных недостатков: на снижение массы гидродинамического якоря и, тем самым, на снижение гидродинамического люфта и увеличение длины рабочего хода гидродинамического якоря, а также на обеспечение выгодной формы профиля крыла как в фазе подъема, так и в фазе опускания.
Технический результат заявляемого изобретения состоит в замене твердотельных подводных крыльев гидродинамического якоря на гидропаруса из мягкого материала, выполняющие ту же функцию, что и подводные крылья. Под действием потока воды гидропарус приобретает форму, подобную профилю подводного крыла, и на нем возникают гидродинамические силы, аналогичные подводному крылу. Однако, вследствие незначительно малой инерционности гидродинамический люфт гидропаруса определяется только его поперечными геометрическими размерами и легко регулируется конструктивными решениями под заданные параметры волнения. А форма гидропаруса автоматически изменяется на симметричную при смене направления водного потока в фазах подъема и опускания гидродинамического якоря.
Возникновение потока воды и гидродинамических сил на гидропарусе происходит вследствие подъема плавающего объекта на переднем склоне волны и передачи этого движения через гибкую связь на элементы гидродинамического якоря и на гидропарус. Размеры, расположение и взаимодействие этих элементов способствуют приобретению гидропарусом необходимой крылоподобной формы для возникновения на нем гидродинамических сил при движении устройства вверх и передачи этих сил через гибкую связь обратно плавающему объекту.
На заднем склоне волны плавающий объект опускается, натяжение гибкой связи ослабевает, а подводные элементы заявляемого устройства опускаются вначале под собственным весом и изменяют свое пространственное положение благодаря предусмотренным изменениям во взаимодействии элементов заявляемого устройства. При опускании возникает водный поток другого направления, который поднимает полотнище гидропаруса в верхнее положение и изменяет форму его профиля на симметричную. При этом на гидропарусе возникает новая гидродинамическая сила, также имеющая горизонтальную составляющую, направленную против сил дрейфа. Под действием сил веса и новой гидродинамической силы гидродинамический якорь стремится не только опуститься, но и продвинуться навстречу дрейфу.
Снижение гидродинамического люфта гидродинамического якоря и образование нового несимметричного профиля крыла увеличивает его техническую эффективность по сравнению с прототипом.
В результате за период волны плавающий объект (например, спасательный плот, спасательная шлюпка, маломерное судно) позиционируются в среднем почти на постоянном месте или с незначительным дрейфом.
Указанный технический результат имеет социально-гуманитарную значимость в двух аспектах. Во-первых, площадь поиска спасательных средств от места их спуска на воду до места их обнаружения пропорциональна квадрату расстояния дрейфа, поэтому снижение дрейфа в n раз уменьшает площадь поиска в n2 раз. Это повышает эффективность поисково-спасательных операций Спасательно-Координационных Центров (СКЦ) и увеличивает вероятность выживания спасающихся людей на этих спасательных средствах. В этом состоит социально - экономический эффект заявляемого изобретения.
Во-вторых, в тех случаях, когда спасательные плоты автоматически всплывают с затонувшего судна и не имеют никакой возможности предотвратить дрейф, снабжение плотов гидродинамическими якорями обеспечивает плотам практически постоянное позиционирование и находящиеся в воде люди имеют возможность подплыть к плоту и воспользоваться им для спасения. В этом состоит гуманитарная значимость заявляемого изобретения.
Указанная цель снижения гидродинамического люфта и изменения формы профиля крыла заявляемого изобретения достигается тем, что гидродинамический якорь, соединенный с плавающим объектом гибкой связью с обеспечением необходимого погружения и угла атаки гидродинамического якоря, содержит раму, включающую боковые кили, соединенные между собой двумя парами поперечных связей, отличающийся тем, что на передние поперечные связи установлены гидропаруса из мягкого материала, вдоль боковых кромок и части задней кромки гидропарусов изготовлены латкарманы с установленными в них латами, боковые латы снабжены шкотами, закрепленными свободным концом на задних поперечных связях, длина боковых лат достигает задних поперечных связей, причем, задние поперечные связи ограничивают возможность поворота боковых лат вниз, а шкоты ограничивают возможность поворота боковых лат вверх.
Существенные признаки заявляемого изобретения связаны с достигаемым техническим результатом следующим образом.
Гибкая связь обеспечивает погружение гидродинамического якоря на необходимую глубину и создает необходимый угол атаки раме гидродинамического якоря.
Рама гидродинамического якоря, включающая боковые кили, соединенные между собой двумя парами поперечных связей, является конструктивным элементом, обеспечивающим основные габаритные размеры устройства, его прочность и жесткость, погружение гидродинамического якоря под действием собственного веса в глубинные слои воды. Гидропаруса из мягкого материала, установленные на передних поперечных связях, обеспечивают возможность выполнения основной функции гидродинамического якоря - создание горизонтальной составляющей гидродинамических сил, возникающих при периодических подъемах и опусканиях гидродинамического якоря плавающим объектом. При этом мягкость материала гидропарусов обеспечивает гидропарусу свободу изменения кривизны формы на симметричную при смене направления движения гидродинамического якоря.
Боковые латы с длиной, достигающей задних поперечных связей, установленные в латкарманы вдоль боковых кромок гидропарусов, выполняют двоякую функцию: расправляют гидропарус в направлении вдоль боковых килей и ограничивают нижнее положение гидропаруса при рабочем движении гидродинамического якоря вверх.
Шкоты боковых лат, закрепленные своими свободными концами на задних поперечных связях, ограничивают верхнее положение гидропаруса при подготовительном движении гидродинамического якоря вниз.
При правильно установленных ограничителями (задними поперечными связями и шкотами) углах атаки гидропарусов обеспечивается возникновение на них гидродинамических сил, необходимых для выполнения основной функции гидродинамического якоря в рабочем цикле (при нахождении плавающего объекта на переднем склоне волны) и возврат рамы в глубинные слои воды с необходимым изменением пространственного положения в подготовительном цикле (при нахождении плавающего объекта на заднем склоне волны).
Латы, установленные в латкарманы части задней кромки гидропарусов, расправляют гидропаруса в направлении поперечных связей. Та часть задней кромки гидропарусов, которая не расправляется латами, необходима для формирования, вкупе с боковыми латами, правильного крылоподобного профиля гидропаруса с заданной пузатостью под нагрузкой.
В целом латкарманы гидропарусов обеспечивают правильное положение лат относительно гидропаруса с формированием конструктивно задаваемой формы сечения профиля и пузатости гидропаруса в рабочем положении, а латы расправляют гидропарус, обеспечивая его работоспособность всей площадью.
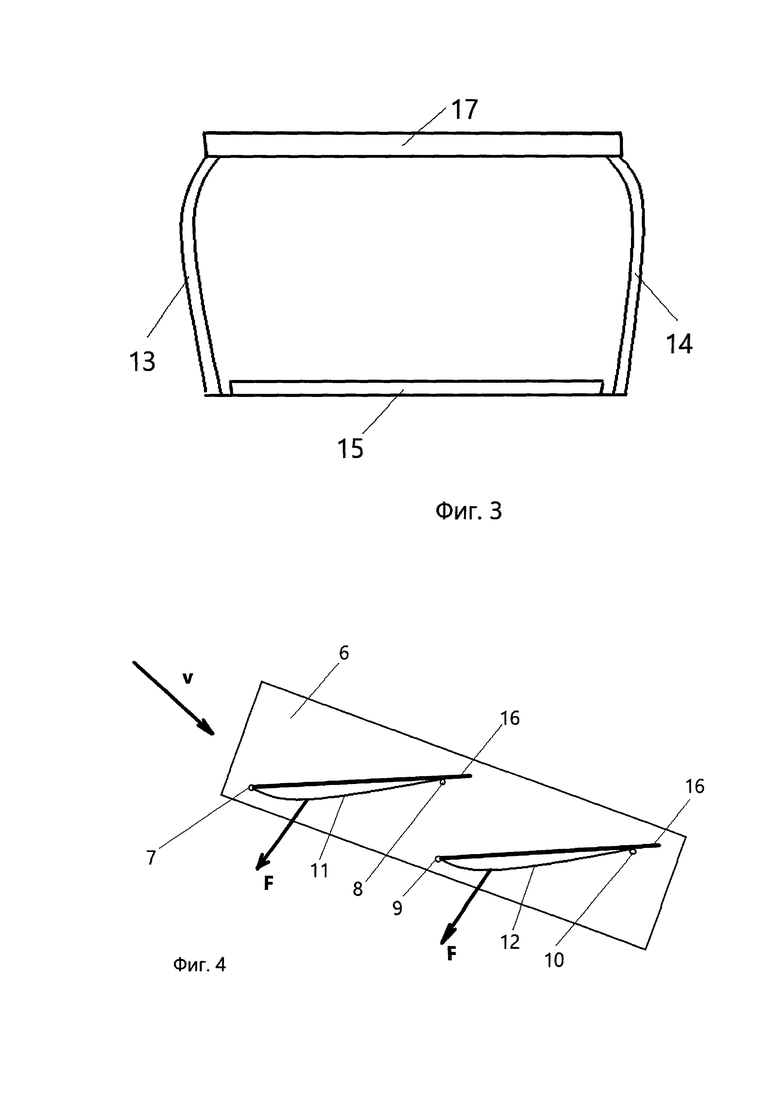
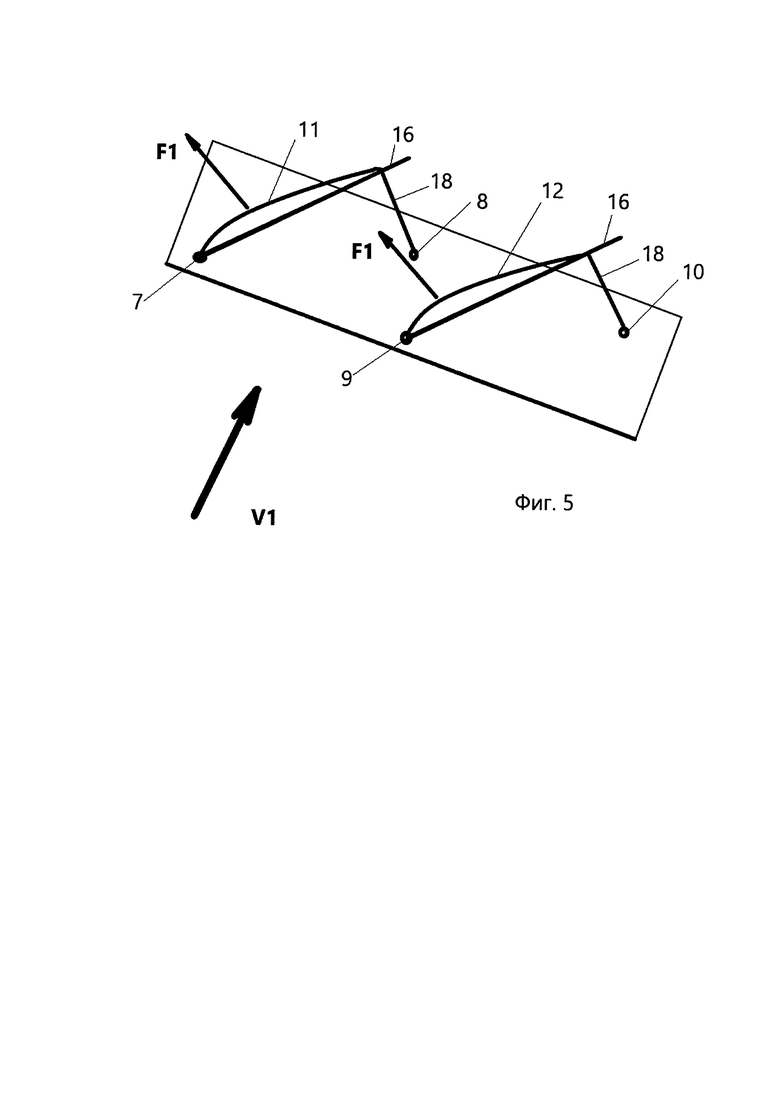
На фиг. 1 показан общий вид плавающего объекта с гидродинамическим якорем. На фиг. 2 показана схема элементов рамы. На фиг. 3 представлено расположение на полотнище гидропаруса латкарманов. На фиг. 4 показано взаимодействие элементов гидродинамического якоря в рабочем цикле на переднем склоне волны. На фиг. 5 показано взаимодействие всех элементов гидродинамического якоря на заднем склоне волны.
Гидродинамический якорь 1 соединен с плавающим объектом 2 гибкой связью 3 и погружен в нижние слои воды 4 собственным весом, фиг. 1. Гидродинамический якорь 1 имеет раму 5, фиг. 2, содержащую два боковых киля 6. Кили 6 соединены между собой двумя парами 7, 8 и 9, 10 поперечных связей. На передних поперечных связях 7, 9 установлены гидропаруса 11, 12, фиг. 4, 5. Гидропаруса 11, 12 имеют латкарманы 13, 14, 15: боковые латкарманы 13, 14 служат для установки боковых лат 16, фиг. 4, 5, а латкарман 15 на части задней кромки гидропаруса служит для установки задней латы. Карман 17 на передней кромке гидропаруса служит для крепления гидропаруса на передних поперечных связях 7, 9.
Поворот гидропарусов 11, 12 в нижнее рабочее положение ограничивается упором боковых лат 16 в поперечные связи 8, 10, фиг. 4. Поворот гидропарусов 11, 12 в верхнее подготовительное положение ограничивается шкотами 18, закрепленными на боковых латах 16 и на поперечных связях 9, 10, фиг. 5.
Гидродинамический якорь 1 работает следующим образом.
Во время раскрытия плота гидродинамический якорь 1 занимает свое рабочее положение в толще воды 4, фиг. 1. Гидропаруса 11, 12 закреплены карманом 17 на передних поперечных связях 7, 9 и расправлены в рабочее положение боковыми латами 16, вставленными в латкарманы 13, 14, и задней латой, вставленной в карман 15, фиг. 2, 3, 4.
На переднем склоне волны плавающий объект 2 поднимается и смещается по ходу волны от ветро-волнового воздействия. Гибкая связь 3 натягивается и увлекает своим натяжением раму 5, обеспечивая обтекание ее потоком воды со скоростью v, фиг. 4. Гидропаруса 11, 12, благодаря опоре боковых лат 16 на задние поперечные связи 8, 10, занимают рабочее положение с кривизной вниз, показанное на фиг. 4. На гидропарусах 11, 12, расположенных к потоку воды v под некоторым углом атаки, возникает гидродинамическая сила F, равнодействующая которой передается гибкой связи 3 в виде ее натяжения. Натяжение гибкой связи 3 передается на плавающий объект 2, где горизонтальная составляющая натяжения препятствует ветро-волновому сносу плавающего объекта 2 и обеспечивает ему стабилизацию позиционирования или небольшой дрейф.
Вертикальная составляющая натяжения гибкой связи компенсируется плавучестью плавающего объекта 2, уменьшая его килевую качку. Этот процесс - рабочий цикл - продолжается до подхода к плавающему объекту 2 вершины волны.
После прохождения вершины волны плавающий объект 2 оказывается на заднем склоне волны и его высота над уровнем неподвижной системы координат (например, подошвой волны) уменьшается. Натяжение гибкой связи 3 ослабевает, гидродинамический якорь 1 под собственным весом опускается. Гидродинамическая сила F1 от изменившегося направления потока v1 меняет направление. Гидропаруса 11, 12 поворачиваются вокруг связей 7, 9, удерживаются на необходимом угле атаки шкотами 18, и благодаря мягкости материала изменяют свою форму на симметричную, фиг. 5. Вертикальная составляющая гидродинамических сил F1 уменьшает действие силы веса и снижает скорость погружения, а горизонтальная составляющая обеспечивает перемещение гидродинамического якоря 1 навстречу движению волны, сохраняя его пространственное положение, необходимое для рабочего цикла. Таким образом, гидродинамический якорь 1 занимает исходное положение в нижних слоях воды перед приходом следующего переднего склона волны, после чего цикл преобразования энергии волны в работу против сил дрейфа плавающего объекта повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОДИНАМИЧЕСКИЙ ЯКОРЬ | 2022 |
|
RU2792851C1 |
| ГИДРОДИНАМИЧЕСКИЙ ЯКОРЬ | 2020 |
|
RU2751044C1 |
| СТАБИЛИЗАТОР ПОЛОЖЕНИЯ НЕУПРАВЛЯЕМОГО ОБЪЕКТА | 2022 |
|
RU2785309C1 |
| СТАБИЛИЗАТОР ПОЗИЦИОНИРОВАНИЯ ПЛАВАЮЩЕГО ОБЪЕКТА (ВАРИАНТЫ) | 2020 |
|
RU2743456C1 |
| СПАСАТЕЛЬНЫЙ ЭКРАНОПЛАН | 2013 |
|
RU2546357C2 |
| ПОПЛАВКОВЫЙ ГИДРОСАМОЛЕТ КАТАМАРАННОЙ СХЕМЫ КОМПОНОВКИ - МОРСКОЙ СПАСАТЕЛЬ "БУРЕВЕСТНИК" | 2004 |
|
RU2270137C2 |
| Водно-воздушное транспортное средство | 2021 |
|
RU2785913C2 |
| ПОИСКОВО-СПАСАТЕЛЬНЫЙ ПОПЛАВКОВЫЙ ГИДРОВЕРТОЛЕТ-АМФИБИЯ "ДЕЛЬФИН" | 2011 |
|
RU2476352C2 |
| ДАЛЬНИЙ ПОИСКОВО-СПАСАТЕЛЬНЫЙ ПОПЛАВКОВЫЙ ГИДРОСАМОЛЕТ-АМФИБИЯ ТРИМАРАННОЙ СХЕМЫ КОМПОНОВКИ "ФРЕГАТ" | 2006 |
|
RU2324627C2 |
| САМОЛЕТ-АМФИБИЯ - ЛЕТНО-СПАСАТЕЛЬНЫЙ КОМПЛЕКС | 2013 |
|
RU2542800C1 |

Изобретение относится к области морского судоходства и может быть использовано в спасательных плотах, шлюпках, краболовных ботах и в маломерных плавающих объектах. Гидродинамический якорь соединен с плавающим объектом гибкой связью и содержит раму, включающую боковые кили, соединенные между собой двумя парами поперечных связей. На передние поперечные связи установлены гидропаруса из мягкого материала своей передней кромкой. Вдоль боковых кромок и части задней кромки гидропарусов изготовлены латкарманы с установленными в них латами. Боковые латы снабжены шкотами, закрепленными свободным концом на задних поперечных связях. Длина боковых лат достигает задних поперечных связей. Задние поперечные связи ограничивают возможность поворота боковых лат вниз, а шкоты ограничивают возможность поворота боковых лат вверх. Достигается эффективное преобразование энергии волнения в работу против сил дрейфа плавающего объекта. 5 ил.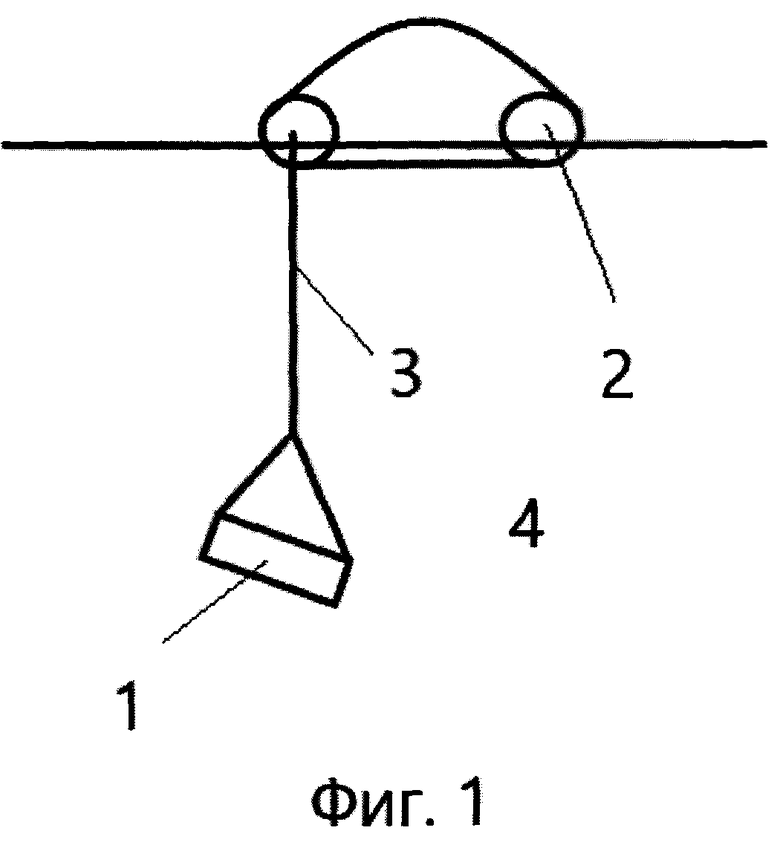
Гидродинамический якорь, соединенный с плавающим объектом гибкой связью с обеспечением необходимого погружения и угла атаки гидродинамического якоря и содержащий раму, включающую боковые кили, соединенные между собой двумя парами поперечных связей, отличающийся тем, что на передние поперечные связи установлены гидропаруса из мягкого материала своей передней кромкой, вдоль боковых кромок и части задней кромки гидропарусов изготовлены латкарманы с установленными в них латами, боковые латы снабжены шкотами, закрепленными свободным концом на задних поперечных связях, длина боковых лат достигает задних поперечных связей, причем задние поперечные связи ограничивают возможность поворота боковых лат вниз, а шкоты ограничивают возможность поворота боковых лат вверх.
| ГИДРОДИНАМИЧЕСКИЙ ЯКОРЬ | 2020 |
|
RU2751044C1 |
| US 20020078872 A1, 27.06.2002 | |||
| ПЛАВУЧИЙ ЯКОРЬ | 2006 |
|
RU2326018C1 |
| СТАБИЛИЗАТОР ПОЗИЦИОНИРОВАНИЯ ПЛАВАЮЩЕГО ОБЪЕКТА (ВАРИАНТЫ) | 2020 |
|
RU2743456C1 |

