Изобретение относится к области морского судоходства и может быть использовано на неуправляемых объектах плавучих средств - например, в гидродинамических якорях спасательных плотов, спасательных шлюпок и маломерных судов.
Известны стабилизаторы положения летательных аппаратов, содержащие фиксированные или управляемые поверхности горизонтального или вертикального расположения в кормовой части фюзеляжа [Войт Е.С., Ендогур А.И., Мелик-Саркисян З.А., Алявдин И.М. Проектирование конструкций самолетов. - М.: Машиностроение, 1987. - 416 с. - С. 242-246; Кестельман В.Н., Федоров А.В. Механизмы управления самолетом. - М.: Машиностроение, 1987. - 184 с. - С. 57-61].
Стабилизаторы положения летательных аппаратов работают в условиях однонаправленного движения летательного аппарата, поэтому их оптимальное расположение - в кормовой части фюзеляжа, а на управляемых стабилизаторах управляемость ограничена небольшими перемещениями для компенсации технологических издержек монтажа рулей направления и высоты.
Известен также гидродинамический якорь [Патент РФ №2751044 МПК В63Н 19/02, F03B 13/12 (2006/01) авторов Сичкарев В.И., Черенович А.С., Кузьмин В.В.], соединенный гибкой связью с плавучим средством и содержащий подводные крылья, раму с центральным и двумя боковыми килями, соединенных между собой двумя парами нижних и двумя верхними поперечными связями. На передние связи нижних пар связей установлены подводные крылья с возможностью ограниченного поворота вокруг этих связей. Задние поперечные связи нижних пар ограничивают возможность поворота крыльев вниз, а верхние поперечные связи ограничивают возможность поворота крыльев вверх. Гибкая связь, соединяющая раму с плавучим средством, закреплена на центральном киле рамы и соединена оттяжками с боковыми килями. Связь обеспечивает расположение в воде плоскости рамы под необходимым углом атаки.
Гидродинамический якорь работает в режиме колебательного движения вперед-назад в проекции на горизонтальную плоскость. Недостатками в работе гидродинамического якоря являются случайная ориентировка его положения в горизонтальной плоскости в момент раскрытия спасательного плота, а также возможность отклонения его движения от прямолинейного (в проекции на горизонтальную плоскость) как во время однонаправленного движения, так и при смене направления движения из-за различных причин технологического плана или случайных флуктуации скорости или плотности воды на горизонте гидродинамического якоря.
Заявляемое изобретение имеет целью повышение эффективности сопротивления дрейфу плавучего средства путем задания начальной общей ориентации положения гидродинамического якоря относительно направления ветрового дрейфа плавучего средства и сохранения (стабилизации) этого положения гидродинамического якоря как при его движении вперед в проекции на горизонтальную плоскость, так и при обратном движении.
Технический результат заявляемого изобретения проявляется в двух направлениях.
Отличительными признаками (элементами) заявляемого изобретения формируется значительное сопротивление боковым движениям гидродинамического якоря, что способствует его оптимальной первоначальной установке по направлению вдоль линии ветрового дрейфа.
Если гидродинамический якорь движется прямолинейно в режиме колебательного движения вперед-назад в проекции на горизонтальную плоскость, то на отличительных элементах заявляемого изобретения возникает предварительно заданная одинаковая рулевая сила, которая в итоге создает нулевой вращающий момент на гидродинамическом якоре относительно точки его подвеса. Но как только у гидродинамического якоря появляется угловая скорость, на одном из его боковых килей линейная скорость становится больше, возникает итоговый вращающий момент относительно точки подвеса, направленный противоположно угловой скорости. Угловая скорость уменьшается и инерция движения возвращает ориентировку гидродинамического якоря в первоначальное положение, то есть стабилизирует его положение.
Если при инерционном повороте гидродинамический якорь пересекает первоначальное положение, вступает в действие противоположный процесс. Таким образом создаются условия для автоматического выравнивания рулевых сил и стабилизации положения неуправляемого объекта.
В итоге технический результат заявляемого изобретения обеспечивает такую стабилизацию неуправляемого объекта (гидродинамического якоря), что горизонтальная проекция вектора гидродинамических сил на гидродинамическом якоре ориентируется в направлении, практически противоположном силам ветрового дрейфа плавучего средства, что повышает эффективность работы гидродинамического якоря по снижению дрейфа плавучего средства.
Указанная задача стабилизации положения неуправляемого объекта достигается тем, что стабилизатор положения, установленный в гидродинамическом якоре, подвешенном к плавучему средству гибкой связью в точке подвеса и содержащем боковые кили, отличается тем, что боковые кили выполнены в виде пластин, расположенных в продольной вертикальной плоскости, в поперечной вертикальной плоскости впереди точки подвеса на внешней стороне боковых килей закреплены оси, на которых установлены рули с возможностью свободного поворота вокруг осей, и ограничители поворота рулей, обеспечивающие предустановленный угол атаки рулей, а предустановленный угол атаки рулей меньше угла атаки максимальной гидродинамической силы рулей.
Существенные признаки заявляемого изобретения связаны с достигаемым техническим результатом следующим образом.
Гибкая связь, обеспечивающая допустимое погружение гидродинамического якоря в глубинные слои воды, а также передачу на плавучее средство нагрузки гидродинамического якоря, в своей точке подвеса имеет центр вращения гидродинамического якоря в горизонтальной плоскости.
В момент раскрытия плота продольная плоскость гидродинамического якоря может быть ориентирована относительно направления дрейфа плота совершенно произвольно. Боковые кили, выполненные в виде пластин, расположенных в продольной вертикальной плоскости гидродинамического якоря, а также рули на внешней стороне боковых килей при дрейфе плота создают значительное сопротивление. Вращающий момент этого сопротивления относительно точки подвеса гидродинамического якоря разворачивает гидродинамический якорь, ориентируя тем самым вертикальную плоскость боковых килей вдоль линии дрейфа. Это направление и должно быть в дальнейшем стабилизировано заявляемым устройством.
Оси, закрепленные на внешней стороне боковых килей в поперечной вертикальной плоскости впереди точки подвеса, предназначены для установки рулей с возможностью их свободного поворота вокруг этих осей. Также на внешней стороне боковых килей установлены ограничители поворота рулей. Свободно поворачивающиеся рули изменяют свое положение относительно боковых килей при изменении направления движения гидродинамического якоря в режиме колебательного движения вперед-назад в проекции на горизонтальную плоскость. При этом в любом направлении поворота крайняя позиция рулей определяется ограничителями поворота рулей, обеспечивающих предустановленный угол атаки рулей, который меньше угла атаки максимальной гидродинамической силы рулей. Одинаковость предустановленных углов атаки рулей обеспечивает равные рулевые силы левого и правого боковых килей при прямолинейном движении гидродинамического якоря. Но при возникновении поворота гидродинамического якоря относительно точки подвеса гибкой связи, на левом и правом рулях равновесие гидродинамических сил нарушается. На том руле, линейная скорость которого совпадает с линейной скоростью от углового вращения, суммарная скорость становится больше, чем на противоположном. Вследствие этого на нем возникает увеличенная гидродинамическая сила и определяемый ею крутящий момент относительно точки подвеса гибкой связи. Этот момент препятствует повороту гидродинамического якоря, восстанавливая стабилизацию его положения.
Необходимость иметь предустановленный угол атаки рулей меньшим, чем угол атаки максимальной гидродинамической силы рулей объясняется тем, что при угловом движении гидродинамического якоря в общем случае изменяется не только линейная скорость обтекания рулей, но и угол атаки потока. На стороне возрастания скорости потока увеличивается и угол атаки руля. При этом образующийся угол атаки не должен превышать угла атаки максимальной гидродинамической силы, ибо это может привести к уменьшению итоговой гидродинамической силы на руле и к уменьшению полезного крутящего момента.
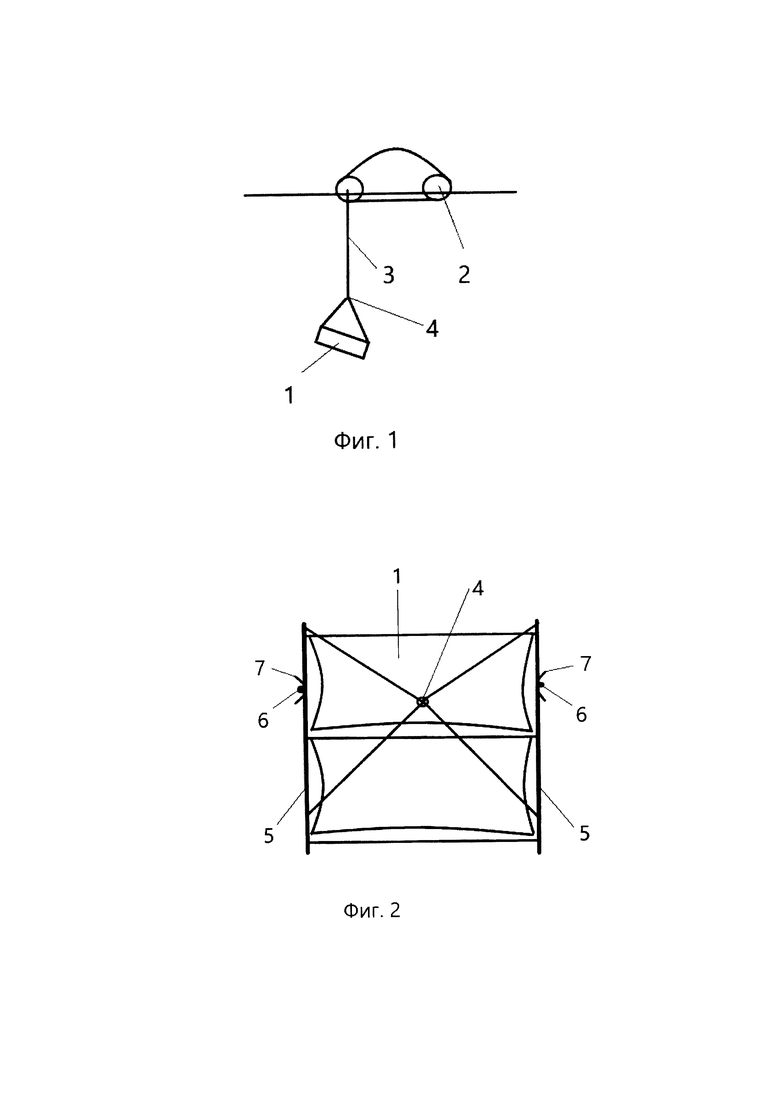
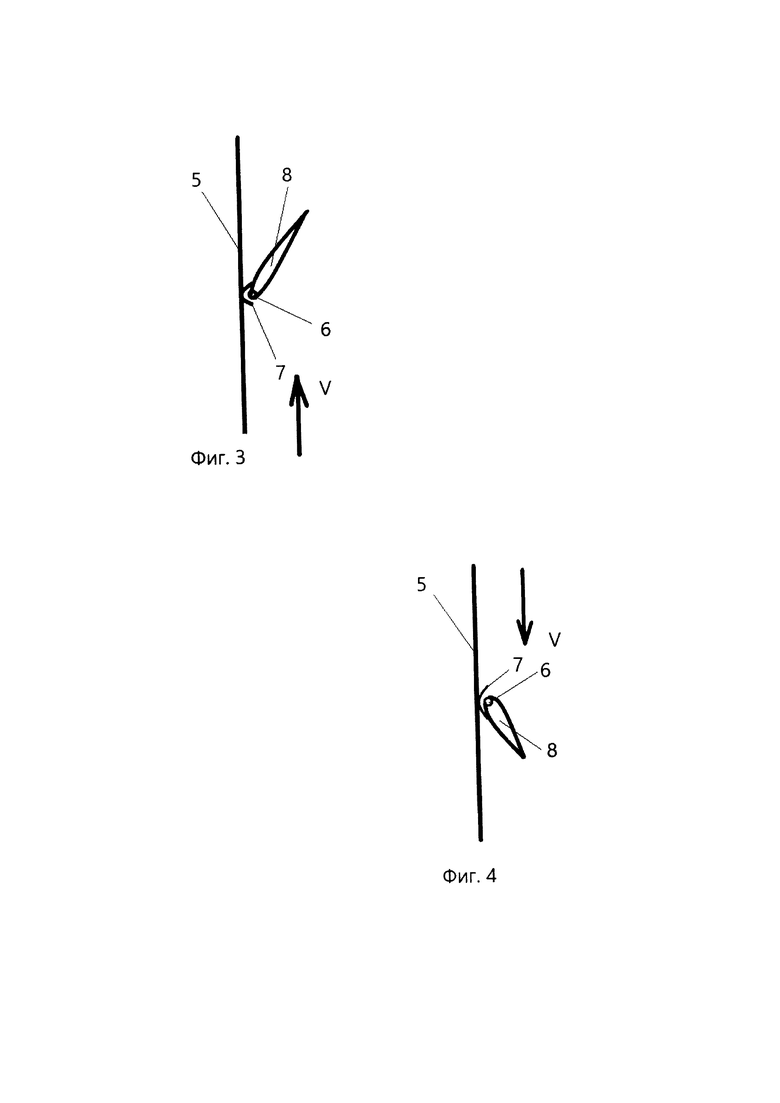
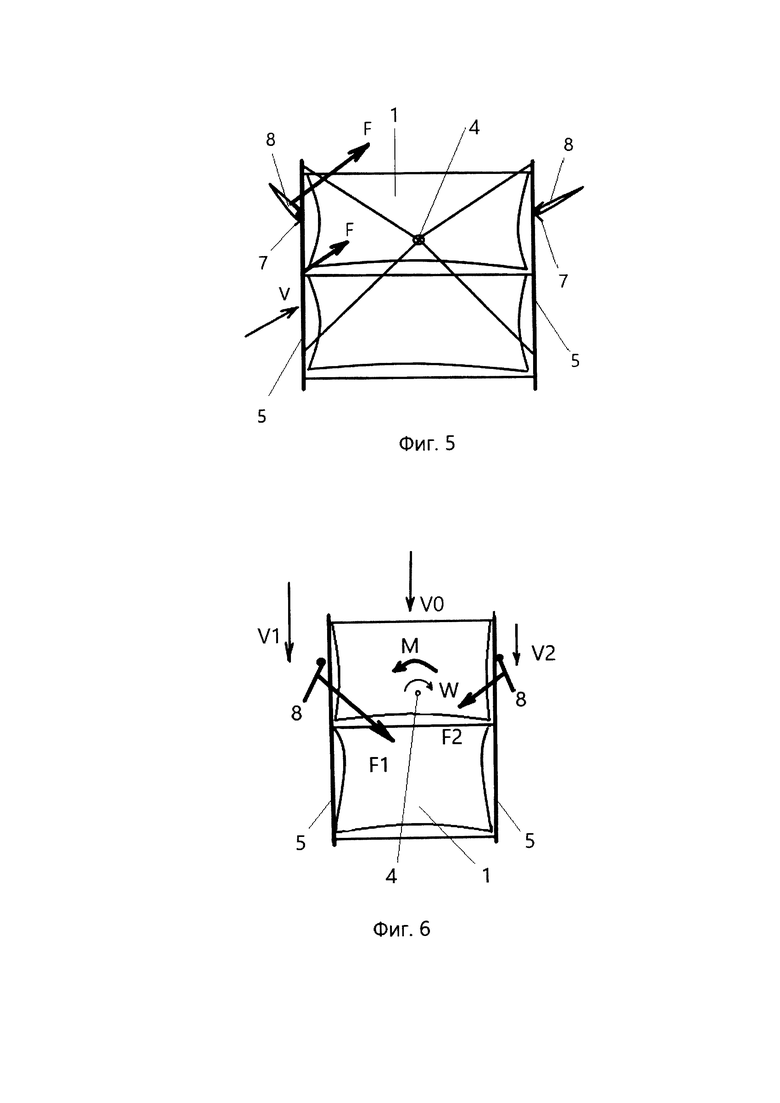
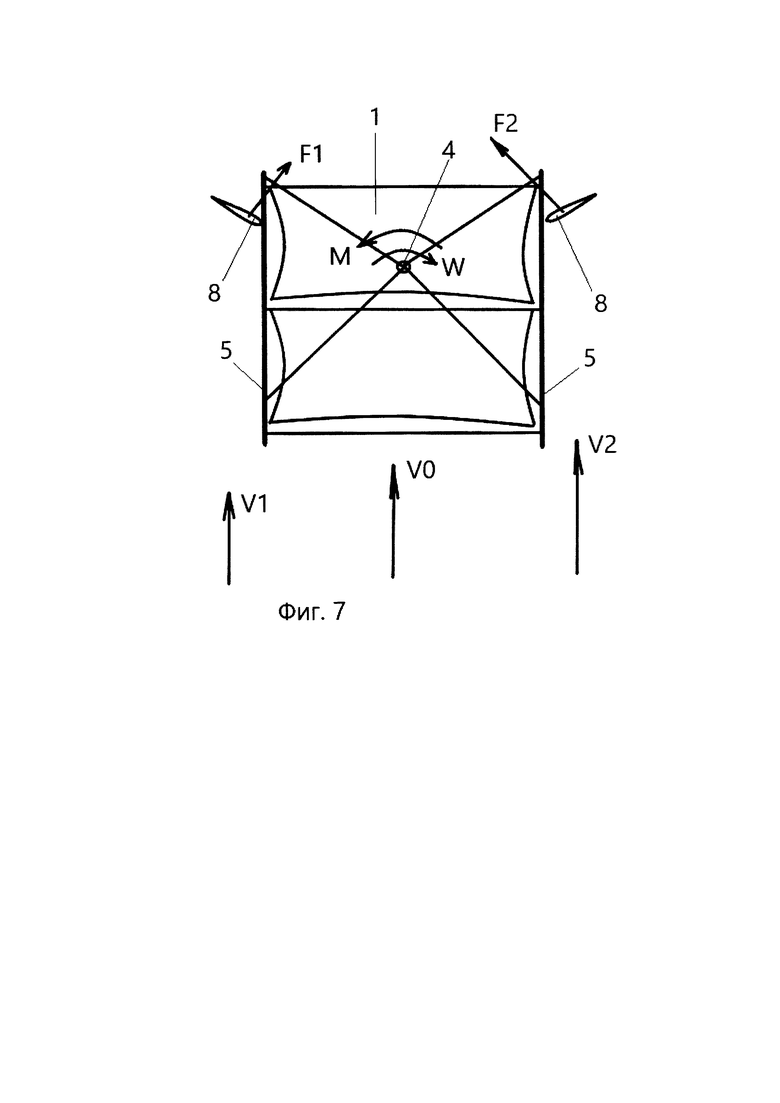
На фиг. 1 показан общий вид плавучего средства с гидродинамическим якорем. На фиг. 2 показан вид сверху схемы размещения осей на внешней стороне боковых килей гидродинамического якоря, а также ограничители поворота рулей. На фиг. 3 представлено расположение руля на оси одного из боковых килей при движении гидродинамического якоря назад. На фиг. 4 представлено расположение руля на оси одного из боковых килей при движении гидродинамического якоря вперед. На фиг. 5 показано распределение сил и моментов при буксировке гидродинамического якоря плотом. На фиг. 6 представлено распределение сил и моментов при возникновении угловой скорости у гидродинамического якоря при движении вперед. На фиг. 7 представлено распределение сил и моментов при возникновении угловой скорости у гидродинамического якоря при движении назад.
Гидродинамический якорь 1 как неуправляемый объект соединен с плавучим средством - например, со спасательным плотом 2 гибкой связью 3 и погружен в нижние слои воды собственным весом, фиг. 1. Гидродинамический якорь 1 соединен с гибкой связью 3 в точке подвеса 4. Боковые кили 5, фиг. 2, выполнены в виде пластин в продольной вертикальной плоскости. На внешней стороне боковых килей 5, в поперечной вертикальной плоскости, закреплены оси 6 и ограничители 7 поворота рулей. На осях 6 установлены рули 8, которым обеспечена свобода поворота вокруг осей 6, фиг. 3, 4. Ограничители поворота 7 ограничивают рулям 8 предельные углы свободного поворота вокруг осей 6 до предустановленного угла атаки, который меньше угла атаки максимальной гидродинамической силы рулей.
Стабилизатор положения неуправляемого объекта 1 работает следующим образом.
В момент активации системы газонаполнения плота 2 в первую очередь раскрывается контейнер плота (не показан), из которого сразу погружается на длину гибкой связи 3 гидродинамический якорь 1, занимая в глубине произвольное положение относительно направления ветра на поверхности. В течение некоторого времени надувается плот 2, на который сразу же воздействует ветер, вызывая дрейф плота по направлению ветра. Дрейф плота 2 через гибкую связь 3 передается гидродинамическому якорю 1. Возникает режим буксировки гидродинамического якоря 1 по направлению дрейфа плота, которому соответствует произвольное направление расположения продольной оси гидродинамического якоря и боковых килей 5. В обращенном движении этот режим идентичен набеганию потока воды V на гидродинамический якорь 1, фиг. 5. При этом один из боковых килей 5 оказывается расположенным навстречу набегающему потоку, фиг 5. Под действием потока V руль 8 этого бокового киля 5 занимает одно из положений с предустановленным углом атаки, заданным ограничителями поворота 7. На боковом киле 5 и на руле 8 возникает гидродинамическая сила F, вращающий момент которой относительно точки подвеса 4 разворачивает гидродинамический якорь 1 задней стороной навстречу набегающему потоку, что равносильно расположению продольной оси гидродинамического якоря 1 навстречу ветру. При этом руль 8 противоположного бокового киля 5 устанавливается по направлению вектора потока V и не опирается на ограничитель 7, следовательно, и не формирует вращающего момента. Достаточно сложное распределение вызванных потоков воды в зоне между боковыми килями 5 и основной крыльевой системой гидродинамического якоря при его буксировке приводит к незначительным поперечным гидродинамическим силам на правом боковом киле 5 и его влиянию на разворот продольной оси гидродинамического якоря. Таким образом происходит первоначальная установка гидродинамического якоря 1 вдоль линии дрейфа плота 2.
Процесс сохранения этой ориентации гидродинамического якоря происходит следующим образом. В штатном рабочем режиме движение гидродинамического якоря 1 происходит по сложной траектории. На переднем склоне волны, когда плот 2 поднимается, на гидродинамическом якоре 1 возникает значительная гидродинамическая сила, под действием которой гидродинамический якорь 1 на натянутой гибкой связи 3 перемещается вперед и вверх, формируя продольное обтекание элементов гидродинамического якоря 1 со скоростью V0, фиг. 6. При этом на левом и правом рулях 8 образуются одинаковые гидродинамические силы, не создающие вращающего момента относительно точки подвеса 4. Если же гидродинамический якорь 1 теряет устойчивость движения и начинает разворачиваться в какую-либо сторону, приобретая угловую скорость W, нарушается равенство линейных скоростей V1, V2 обтекания левого и правого боковых килей 5 и их рулей 8. На руле 8 с большей линейной скоростью V1 возникает более значительная сила F1, которая создает возвращающий момент М относительно точки подвеса 4. В результате гидродинамический якорь восстанавливает устойчивость движения вперед.
На заднем склоне волны, когда плот 2 опускается, гидродинамический якорь 1 вначале движется назад и вниз, затем его крыльевая система перестраивается и начинается движение вперед и вниз. Движение вперед и вниз сохраняет устойчивость аналогично вышеописанному процессу, а сохранение устойчивости при движении назад и вниз обеспечивается следующим процессом.
При прямолинейном движении сохраняется равенство скоростей, гидродинамических сил рулей 8 и равенство нулю вращающего момента относительно точки подвеса 4.
Если у гидродинамического якоря 1 появляется какая-либо угловая скорость W, фиг. 7, то линейные скорости V1 и V2 обтекания левого и правого боковых килей 5 становятся разными, что создает неравенство гидродинамических сил F1, F2 на левом и правом рулях 8. В результате возникает вращающий момент М относительно точки подвеса 4, который восстанавливает устойчивость движения гидродинамического якоря 1 на заднем ходу.
Таким образом на всех видах движения гидродинамического якоря сохраняется стабилизация его положения относительно направления дрейфа плота.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛИЗАТОР ПОЗИЦИОНИРОВАНИЯ ПЛАВАЮЩЕГО ОБЪЕКТА (ВАРИАНТЫ) | 2020 |
|
RU2743456C1 |
| ГИДРОДИНАМИЧЕСКИЙ ЯКОРЬ | 2020 |
|
RU2751044C1 |
| ГИДРОДИНАМИЧЕСКИЙ ЯКОРЬ | 2022 |
|
RU2785310C1 |
| ГИДРОДИНАМИЧЕСКИЙ ЯКОРЬ | 2022 |
|
RU2792851C1 |
| СПАСАТЕЛЬНЫЙ ЭКРАНОПЛАН | 2013 |
|
RU2546357C2 |
| ГИДРОАЭРОДИНАМИЧЕСКОЕ СУДНО "ВЕТРОВОЛНОХОД" | 1992 |
|
RU2048387C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ БРОЧИНГА | 2021 |
|
RU2781020C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЛАВУЧИМ СПАСАТЕЛЬНЫМ УСТРОЙСТВОМ С МАЛЫМИ ИМПЕЛЛЕРАМИ НА СЖАТОМ ПНЕВМОПОТОКЕ НА ДИСТАНЦИОННОМ УПРАВЛЕНИИ | 2019 |
|
RU2718826C1 |
| СПАСАТЕЛЬНЫЙ ТРИМАРАННЫЙ ЭКРАНОПЛАН Н.Р.ЯНСУФИНА | 2001 |
|
RU2250845C2 |
| БУКСИРУЕМЫЙ НОСИТЕЛЬ ДЛЯ ГИДРОНАВТОВ | 1993 |
|
RU2070130C1 |
Изобретение относится к области морского судоходства и может быть использовано в гидродинамических якорях спасательных плотов, спасательных шлюпок и маломерных судов. Стабилизатор положения неуправляемого объекта установлен в гидродинамическом якоре, подвешенном к плавучему средству гибкой связью в точке подвеса, который содержит боковые кили, которые выполнены в виде пластин, расположенных в продольной вертикальной плоскости. В поперечной вертикальной плоскости впереди точки подвеса на внешней стороне боковых килей закреплены оси, на которых установлены рули с возможностью свободного поворота вокруг осей, и ограничители поворота рулей, обеспечивающие предустановленный угол атаки рулей. Предустановленный угол атаки рулей меньше угла атаки максимальной гидродинамической силы рулей. Достигается обеспечение первоначальной установки гидродинамического якоря по направлению линии ветрового дрейфа и стабилизация его положения в рабочем цикле. 7 ил.
Стабилизатор положения неуправляемого объекта, установленный в гидродинамическом якоре, подвешенном к плавучему средству гибкой связью в точке подвеса и содержащем боковые кили, отличающийся тем, что боковые кили выполнены в виде пластин, расположенных в продольной вертикальной плоскости, в поперечной вертикальной плоскости впереди точки подвеса на внешней стороне боковых килей закреплены оси, на которых установлены рули с возможностью свободного поворота вокруг осей, и ограничители поворота рулей, обеспечивающие предустановленный угол атаки рулей, а предустановленный угол атаки рулей меньше угла атаки максимальной гидродинамической силы рулей.
| ГИДРОДИНАМИЧЕСКИЙ ЯКОРЬ | 2020 |
|
RU2751044C1 |
| СТАБИЛИЗАТОР ПОЗИЦИОНИРОВАНИЯ ПЛАВАЮЩЕГО ОБЪЕКТА (ВАРИАНТЫ) | 2020 |
|
RU2743456C1 |
| KR 1020160024701 A, 07.03.2016 | |||
| US 3872819 A1, 25.03.1975. | |||

