Изобретение относится к области морского судоходства и может быть использовано в плавающих объектах - спасательных плотах, шлюпках и маломерных судах.
Известен стабилизатор позиционирования плавающего объекта (варианты) [Патент РФ №2743456 МПК В63 В 43/14 (2006.01) авторов Сичкарев В.И., Кузьмин В.В.]. Стабилизатор позиционирования соединен с плавающим объектом гибкой связью и погружен в нижние слои воды собственным весом. Стабилизатор позиционирования содержит раму с прикрепленной к ней сеткой и прямоугольные пластины из мягкого материала, прикрепленные к сетке вплотную друг к другу продольным краем с возможностью поворота вокруг закрепленного края.
Вариант стабилизатора позиционирования содержит прикрепленный к нижней стороне рамы предкрылок, выполненный в виде рамы с закрепленной на ней сеткой, к нижней стороне которой прикреплена своим продольным краем пластина из мягкого материала.
Исследования показали достаточно эффективную работу этого устройства в качестве гидродинамического якоря для плавающих объектов [Сичкарев В.И. Предварительные исследования стабилизатора позиционирования спасательного средства / В.И. Сичкарёв, В.В. Кузьмин, А.С. Черенович, А.Г. Лещенко // Международный научно-промышленный форум «Транспорт.Горизонты развития», 25-28 мая 2021 г. https://www.transporthorizont.ru/]. Однако, у конструкции обнаружились определенные недостатки. При увеличении конструкции до требуемых размеров по ширине, возникло несоответствие между жесткостью пластин из мягкого материала (тканевых лент) и их продольным и поперечным размером. По этой причине завихренным потоком обтекающей воды ленты на большой длине сминаются и не полностью перекрывают площадь сетки, что снижает эффективность гидродинамического якоря.
Плоская форма конструкции не является самой эффективной для возникновения гидродинамических сил, а для придания устройству крылоподобной формы необходимо использовать сетку из твердых материалов, например, из металла. При этом возникают технологические сложности в закреплении лент, требующие ручного труда.
Известен гидродинамический якорь [Патент РФ №2751044 МПК В63Н 19/02, F03B 13/12 (2006.01) авторов Сичкарев В.И., Черенович А.С., Кузьмин В.В.], соединенный гибкой связью с плавающим объектом и содержащий подводные крылья, раму с центральным и двумя боковыми килями, соединенных между собой двумя парами нижних и двумя верхними поперечными связями. На передние связи нижних пар связей установлены подводные крылья с возможностью ограниченного поворота вокруг этих связей. Задние поперечные связи нижних пар ограничивают возможность поворота крыльев вниз, а верхние поперечные связи ограничивают возможность поворота крыльев вверх. Гибкая связь, соединяющая раму с плавающим объектом, закреплена на центральном киле рамы и соединена оттяжками с боковыми килями. Связь обеспечивает расположение в воде плоскости рамы под необходимым углом атаки.
Этот аналог показал в исследованиях высокие значения гидродинамических сил, хорошую работоспособность на волнах высотой более 1 м с периодом более 4 с.
У этого аналога имеются два недостатка.
Первый недостаток - большая масса подводных крыльев. Это приводит к возникновению двух нежелательных явлений. В начале подъема гидродинамического якоря из его нижнего положения в верхнее происходит инерционная задержка с возвращением крыльев из поднятого положения в рабочее. В начале погружения гидродинамического якоря из его верхнего положения возникает инерционная задержка в развороте подводных крыльев из рабочего положения в поднятое. В результате образуется некоторый гидродинамический люфт в перемещениях гидродинамического якоря, на величину которого уменьшается рабочее перемещение с возникновением полезных гидродинамических сил гидродинамического якоря.
Второй недостаток - подводные крылья в фазе подъема и опускания должны иметь горизонтальную составляющую гидродинамической силы, направленную в одну и ту же сторону - навстречу дрейфу. Но при этом относительно профиля крыла - это разные направления. В фазе подъема гидродинамического якоря (основная рабочая фаза) гидродинамическая сила направлена навстречу дрейфу и вниз, со стороны нагнетающей в сторону подсасывающей поверхности несимметричного профиля крыла. В фазе опускания (подготовительная фаза) гидродинамическая сила направлена навстречу дрейфу и вверх, со стороны подсасывающей в сторону нагнетающей поверхности несимметричного крыла, которая в подготовительной фазе, таким образом, становится подсасывающей. При таком обтекании существенно снижается гидродинамическое качество твердотельного крыла.
Замена несимметричного профиля крыла на симметричный устраняет этот недостаток, но гидродинамическое качество крыла симметричного профиля в рабочей фазе ниже, чем у несимметричного профиля.
Известен также гидродинамический якорь, [Патент РФ №2785310 МПК В63Н 19/02, F03B 13/12 (2006.01) авторов Сичкарев В.И., Черенович А.С.], соединенный с плавающим объектом гибкой связью с обеспечением необходимого погружения и угла атаки гидродинамического якоря и содержащий раму, включающую боковые кили, соединенные между собой двумя парами поперечных связей, отличающийся тем, что на передние поперечные связи установлены гидропаруса из мягкого материала своей передней кромкой. Вдоль боковых кромок и части задней кромки гидропарусов изготовлены латкарманы с установленными в них латами. Боковые латы снабжены шкотами, закрепленными свободным концом на задних поперечных связях. Длина боковых лат достигает задних поперечных связей, причем, задние поперечные связи ограничивают возможность поворота боковых лат вниз, а шкоты ограничивают возможность поворота боковых лат вверх.
Этот аналог, принятый в качестве прототипа, показал в исследованиях наиболее высокие значения гидродинамических сил, хорошую работоспособность на волнах с достаточно большим периодом.
К недостаткам этого устройства можно отнести то, что его эффективность снижается на мелких волнах из-за так называемого гидродинамического люфта, возникающего из-за перехлопывания достаточно большого по хорде гидропаруса при смене цикла подъема на цикл опускания гидродинамического якоря.
Учитывая, что гидродинамический якорь спасательных средств должен безупречно хорошо работать на любом волнении, в том числе на развивающемся и на мелководном, где волнение может быть с высотами менее одного метра, и основываясь на результатах проведенных исследований, [Отчет по научно-исследовательской работе «Совершенствование средств снижения дрейфа спасательных плотов морских судов с целью снижения риска гибели людей и издержек поисковых работ в спасательных операциях», выполненной по гос.заданию №110-00018-21-00. - Новосибирск: СГУВТ, 2021. - 125 с. ], представляется возможным синтезировать устройство гидродинамического якоря, сохраняющее достоинства приведенных аналогов, но лишенное их недостатков. Таким образом, заявляемое изобретение нацелено на уменьшение гидродинамического люфта, на снижение инерционности переходного процесса гидродинамического якоря при смене режимов его движения вверх - вниз, на сохранение выгодной формы крыловидного профиля рабочего органа в режиме движения гидродинамического якоря вверх и обеспечение активных углов атаки в режиме движения вниз, на повышение технологичности изготовления гидродинамического якоря.
Технический результат заявляемого изобретения состоит в замене его рабочего органа - гидропаруса - на сетное полотно с нашитыми на него определенным образом достаточно узкими лентами из мягкого материала. При этом сетному полотну в корпусе гидродинамического якоря обеспечивается придание формы подсасывающей поверхности крыла. Сформированное таким образом сетное полотно с устилающими его поверхность лентами из мягкого материала в рабочем процессе подъема гидродинамического якоря эффективно выполняет функцию крыла по созданию гидродинамических сил, препятствующих дрейфу плота. При смене цикла подъема гидродинамического якоря на цикл его опускания закрепленные на сетном полотне ленты из мягкого материала потоком воды сквозь сетное полотно отжимаются от его поверхности и на некоторой части своей длины принимают форму нагнетающей поверхности крыла. Это, во-первых, обеспечивает существенное снижение инерционности и гидродинамического люфта за счет небольшой ширины лент из мягкого материала, во-вторых, значительно снижает сопротивление воды опусканию гидродинамического якоря. Эти результаты устраняют основной недостаток аналогов по недостаточно эффективной работе на незначительном волнении.
Придание сетному полотну в корпусе гидродинамического якоря выгодной формы подсасывающей поверхности крыла обеспечивается щелевидными прорезями в его вертикальных килях.
Возможность установки в корпус гидродинамического якоря сетного полотна с заранее нашитыми на него лентами их мягкого материала существенно повышает технологичность сборки гидродинамического якоря и снижает долю ручного труда.
Все это увеличивает техническую эффективность предлагаемого изобретения на небольшом волнении и на мелководных акваториях, сохраняя достигнутую эффективность прототипа на больших волнах с большим периодом.
Указанная цель уменьшения гидродинамического люфта, снижения инерционности переходного процесса гидродинамического якоря при смене режимов движения вверх - вниз, сохранения выгодной формы крыловидного профиля рабочего органа в режиме движения вверх и обеспечение активных углов атаки в режиме движения вниз, повышения технологичности изготовления гидродинамического якоря достигается тем, что гидродинамический якорь, соединенный с плавающим объектом гибкой связью с обеспечением необходимого погружения и угла атаки гидродинамического якоря и содержащий раму, включающую вертикальные боковые кили, соединенные между собой поперечными связями, отличается тем, что параллельно боковым килям между ними установлено несколько дополнительных килей, на всех килях образованы направляющие прорези по форме подсасывающей поверхности крылового профиля выпуклостью вниз, в которые вставлено сетное полотно, на котором сверху в поперечном килям направлении вплотную друг к другу вдоль своей передней кромки закреплены ленты из мягкого материала.
Существенные признаки заявляемого изобретения связаны с достигаемым техническим результатом следующим образом.
Гибкая связь обеспечивает погружение гидродинамического якоря на необходимую глубину и создает необходимый угол атаки раме гидродинамического якоря.
Рама гидродинамического якоря, включающая вертикальные боковые кили, соединенные между собой поперечными связями, является конструктивным элементом, обеспечивающим основные габаритные размеры устройства, его прочность и жесткость, погружение гидродинамического якоря под действием собственного веса в глубинные слои воды. Вертикальные боковые кили и параллельные им дополнительные кили имеют направляющие прорези, которые обеспечивают необходимые форму и расположение рабочего органа - сетного полотна.
Сетное полотно, на котором сверху в поперечном килям направлении вплотную друг к другу вдоль своей передней кромки закреплены ленты из мягкого материала, будучи уложенным в направляющие прорези боковых и дополнительных килей, формируют гидродинамическую силу для предотвращения дрейфа плота.
Дополнительные кили на достижение технического результата влияют следующим образом. Ленты из мягкого материала, закрепленные на сетном полотне, в цикле опускания гидродинамического якоря встречным потоком воды поднимаются вверх. Сопротивление опусканию гидродинамического якоря при таком расположении лент минимально, но активной гидродинамической силы на них не создается. Для создания активной гидродинамической силы навстречу дрейфу необходимо ограничить подъем лент оптимальным углом атаки хотя бы на части длины лент. Роль ограничителя подъема лент выполняют боковые и дополнительные кили, через направляющие прорези которых проходит сетное полотно с лентами. Будучи прижатыми к сетному полотну в направляющих прорезях, ленты плавно меняют угол атаки от 90° вблизи прорезей до 0° ближе к середине, проходя на некотором участке через оптимальные значения угла атаки лент относительно водного потока.
Еще два положительных влияния дополнительных килей состоит в увеличении массы корпуса гидродинамического якоря, полезной для цикла опускания, а также в увеличении бокового сопротивления, полезного для стабилизации направления тяги гидродинамического якоря.
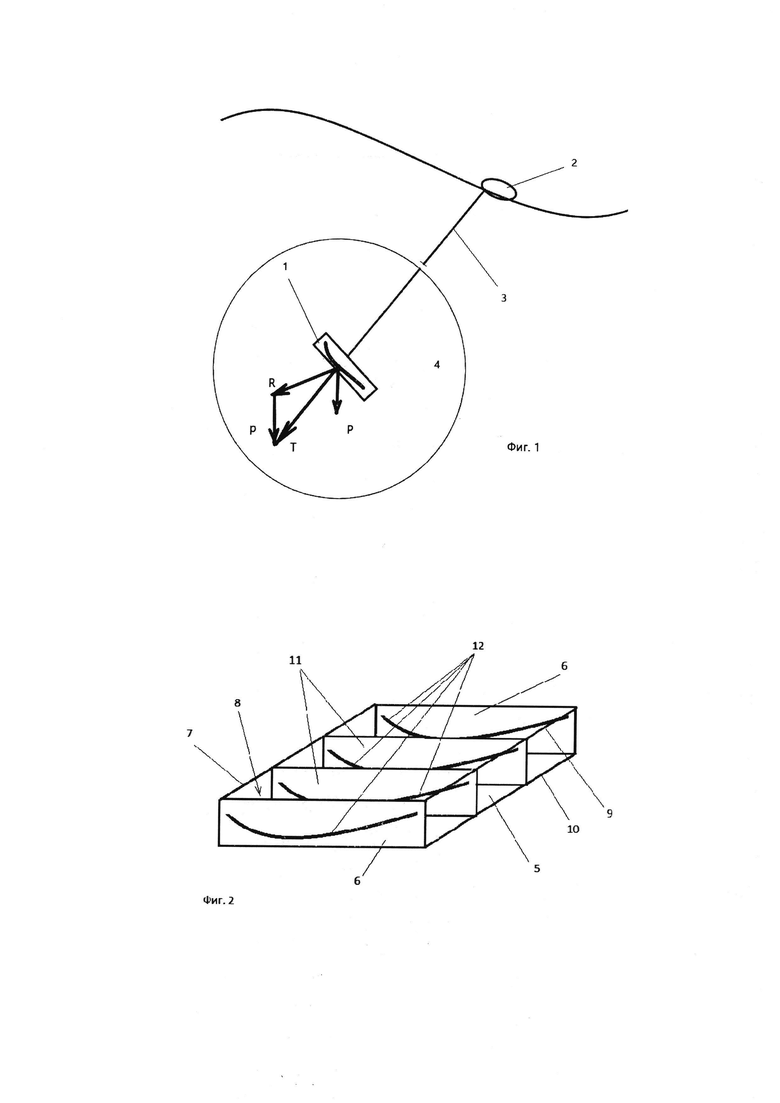
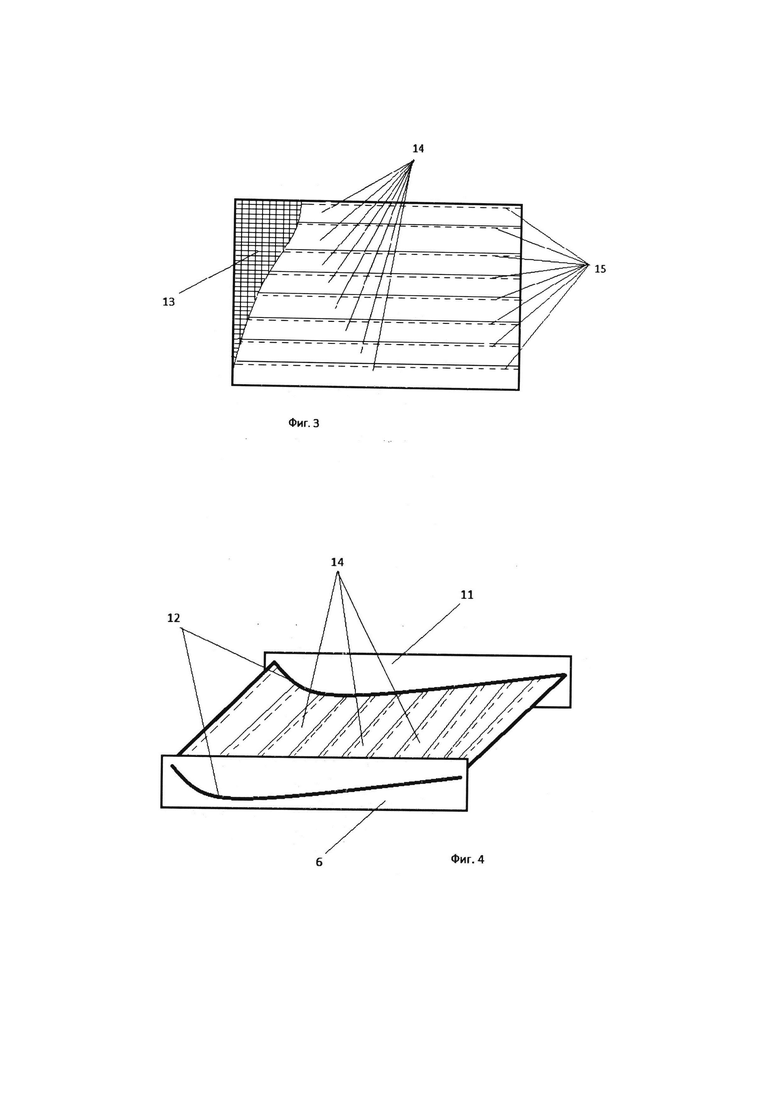
На фиг. 1 показан общий вид плавающего объекта с гидродинамическим якорем. На фиг. 2 показана схема элементов рамы с боковыми и дополнительными килями и направляющими прорезями. На фиг. 3 представлено расположение на сетном полотне лент из мягкого материала. На фиг. 4 показано расположение сетного полотна с лентами из мягкого материала в направляющих прорезях килей. На фиг. 5 показано расположение лент из мягкого материала на сетном полотне в корпусе гидродинамического якоря в рабочем цикле на переднем склоне волны. На фиг. 6 показан фрагмент расположения одной из лент из мягкого материала на сетном полотне в корпусе гидродинамического якоря при его опускании на заднем склоне волны.
Гидродинамический якорь 1 соединен с плавающим объектом 2 гибкой связью 3 и погружен в нижние слои воды 4 собственным весом, фиг. 1. Гидродинамический якорь 1 имеет раму 5, фиг.2, содержащую вертикальные боковые кили 6. Кили 6 соединены между собой поперечными связями 7, 8, 9, 10. Параллельно боковым килям 6 между ними установлены дополнительные кили 11. На всех килях 6, 11 образованы направляющие прорези 12 по форме подсасывающей поверхности крылового профиля выпуклостью вниз. Прорези 12 образованы для размещения в них сетного полотна 13, фиг. 3. Сверху на сетное полотно 13 закреплены ленты 14 из мягкого материала. Ленты 14 накладываются на сетное полотно 13 вплотную друг к другу и закрепляются вдоль своей передней кромки 15. Ориентация лент 14 на сетном полотне 13 должна быть перпендикулярна килям 6, 11.
Гидродинамический якорь 1 работает следующим образом.
Во время раскрытия плота гидродинамический якорь 1 занимает свое рабочее положение в толще воды 4, фиг. 1.
На переднем склоне волны плавающий объект 2 поднимается и смещается по ходу волны от ветро-волнового воздействия. Гибкая связь 3 натягивается и увлекает своим натяжением раму 5, фиг.2, обеспечивая обтекание ее потоком воды со скоростью v, фиг. 5. Ленты 14 из мягкого материала, полностью покрывающие сетное полотно 13, фиг. 3, установленное в прорезях 12 килей 6, 11, фиг. 2, образуют поверхность, идентичную по форме подсасывающей поверхности крылового профиля с выпуклостью, направленной вниз, фиг. 4, 5. На этой поверхности генерируется давление, формирующее главный вектор гидродинамических сил R, который суммируется с силой веса Р гидродинамического якоря 1, фиг. 1. Равнодействующая этих сил передается гибкой связи 3 в виде ее натяжения Т. Натяжение Т гибкой связи 3 передается на плавающий объект 2, где горизонтальная составляющая натяжения препятствует ветро-волновому сносу (дрейфу) плавающего объекта 2. Вертикальная составляющая натяжения Т гибкой связи компенсируется плавучестью плавающего объекта 2, уменьшая его килевую качку. Этот процесс - рабочий цикл - продолжается до подхода к плавающему объекту 2 вершины волны.
После прохождения вершины волны плавающий объект 2 оказывается на заднем склоне волны и начинает опускаться. Натяжение гибкой связи 3 ослабевает, гидродинамический якорь 1 под собственным весом Р также опускается. Направление потока воды v меняется, обтекая весь корпус гидродинамического якоря 5 снизу вверх, фиг. 6. Ленты 14 потоком воды отжимаются от сетного полотна 13 и поворачиваются вокруг линий крепления 15. Благодаря мягкости материала лент 14 задняя кромка изменяет свою форму на криволинейную, что предопределяет изменение угла атаки различных участков лент 14. Углы атаки лент 14 по мере удаления от килей 6, 11 изменяются от 90° до 0° к середине участка между килями 6, 11 и снова до 90° к следующему килю 11 или 6. На некоторых участках длины лент 14 углы атаки обеспечивают генерацию небольшой гидродинамической силы, направленной в сторону передней части рамы гидродинамического якоря 5. Поскольку ленты 14 равномерно распределены вдоль килей 6, 11, незначительные гидродинамические силы не создают заметного вращающего момента на раме гидродинамического якоря 5. Вертикальная составляющая гидродинамических сил частично уменьшает действие силы веса и снижает скорость погружения, а горизонтальная составляющая обеспечивает незначительное перемещение гидродинамического якоря 1 навстречу движению волны. При этом практически сохраняется его пространственное положение, необходимое для следующего рабочего цикла. Таким образом, гидродинамический якорь 1 занимает исходное положение в нижних слоях воды перед приходом следующего переднего склона волны, после чего цикл преобразования энергии волны в работу гидродинамических сил против сил дрейфа плавающего объекта повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОДИНАМИЧЕСКИЙ ЯКОРЬ | 2022 |
|
RU2785310C1 |
| СТАБИЛИЗАТОР ПОЗИЦИОНИРОВАНИЯ ПЛАВАЮЩЕГО ОБЪЕКТА (ВАРИАНТЫ) | 2020 |
|
RU2743456C1 |
| ГИДРОДИНАМИЧЕСКИЙ ЯКОРЬ | 2020 |
|
RU2751044C1 |
| СТАБИЛИЗАТОР ПОЛОЖЕНИЯ НЕУПРАВЛЯЕМОГО ОБЪЕКТА | 2022 |
|
RU2785309C1 |
| ПОИСКОВО-СПАСАТЕЛЬНЫЙ ПОПЛАВКОВЫЙ ГИДРОВЕРТОЛЕТ-АМФИБИЯ "ДЕЛЬФИН" | 2011 |
|
RU2476352C2 |
| ДАЛЬНИЙ ПОИСКОВО-СПАСАТЕЛЬНЫЙ ПОПЛАВКОВЫЙ ГИДРОСАМОЛЕТ-АМФИБИЯ ТРИМАРАННОЙ СХЕМЫ КОМПОНОВКИ "ФРЕГАТ" | 2006 |
|
RU2324627C2 |
| ПОПЛАВКОВЫЙ ГИДРОСАМОЛЕТ КАТАМАРАННОЙ СХЕМЫ КОМПОНОВКИ - МОРСКОЙ СПАСАТЕЛЬ "БУРЕВЕСТНИК" | 2004 |
|
RU2270137C2 |
| Устройство для горизонтального раскрытия трала | 1990 |
|
SU1725795A1 |
| ТРАНСФОРМИРУЮЩЕЕСЯ ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2018 |
|
RU2692311C1 |
| СЕТНОЕ КАСКАДНОЕ УСТРОЙСТВО ДЛЯ ПРОМЫСЛА ПОВЕРХНОСТНЫХ ОБЪЕКТОВ ЛОВА | 1997 |
|
RU2123784C1 |

Изобретение относится к области морского судоходства и может быть использовано в плавающих объектах - спасательных плотах, шлюпках и маломерных судах. Гидродинамический якорь соединен с плавающим объектом гибкой связью с обеспечением необходимого угла атаки между гибкой связью и плоскостью рамы и погружен в нижние слои воды собственным весом. Гидродинамический якорь содержит раму, включающую вертикальные боковые кили, соединенные между собой поперечными связями. Параллельно боковым килям установлено несколько дополнительных килей. На всех килях образованы направляющие прорези по форме подсасывающей поверхности крылового профиля выпуклостью вниз. В прорезях установлено сетное полотно. На сетном полотне сверху в поперечном килям направлении вплотную друг к другу вдоль своей передней кромки закреплены ленты из мягкого материала. Достигается эффективная работа гидродинамического якоря на незначительном волнении. 6 ил.
Гидродинамический якорь, соединенный с плавающим объектом гибкой связью с обеспечением необходимого погружения и угла атаки гидродинамического якоря и содержащий раму, включающую вертикальные боковые кили, соединенные между собой поперечными связями, отличающийся тем, что параллельно боковым килям между ними установлено несколько дополнительных килей, на всех килях образованы направляющие прорези по форме подсасывающей поверхности крылового профиля выпуклостью вниз, в которые вставлено сетное полотно, на котором сверху в поперечном килям направлении вплотную друг к другу вдоль своей передней кромки закреплены ленты из мягкого материала.
| ГИДРОДИНАМИЧЕСКИЙ ЯКОРЬ | 2022 |
|
RU2785310C1 |
| ГИДРОДИНАМИЧЕСКИЙ ЯКОРЬ | 2020 |
|
RU2751044C1 |
| US 3872819 A1, 25.03.1975 | |||
| CN 103635384 B, 30.11.2016. | |||

