ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка испрашивает приоритет на основании заявки на патент Китая № 201910904197.4, поданной 24 сентября 2019 г., все содержание которой настоящим включено в настоящую заявку посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Примеры осуществления настоящего изобретения относятся к области связи, в частности, к способу определения положения помех сигнала.
УРОВЕНЬ ТЕХНИКИ
[0003] Помехи сигнала системы базовых станций можно разделить на внутрисистемные помехи и межсистемные помехи в зависимости от их источника. Базовая станция содержит передающую систему и приёмную систему. Не существует такого идеального фильтра, который может ограничивать передаваемые и принимаемые сигналы рабочими частотами, настроенными базовой станцией, поэтому будет происходить утечка передаваемых сигналов на другие рабочие частоты, и приемная система базовой станции получает мощность сигнала с других частот на указанной рабочей частоте, что влияет на нормальное обслуживание этой базовой станции и возникают межсистемные помехи.
[0004] Межсистемные помехи могут привести к таким сетевым проблемам, как нарушение доступа пользователей мобильных телефонов, обрыв звонков или нарушение коммутации во время перемещения. Как только такие проблемы возникают, персонал по эксплуатации и техническому обслуживанию базовых станций должен производить диагностику и устранение неисправностей. Обычный способ, используемый эксплуатационным и обслуживающим персоналом базовой станции для устранения помех, заключается в том, чтобы сначала подтвердить наличие внутрисистемных помех. Если внутрисистемные помехи устранены, то помехи представляют собой межсистемные помехи.
[0005] Однако изобретатели данного изобретения обнаружили, что для межсистемных помех первым этапом является выяснение того, откуда исходят помехи, и для определения положения возможной помехи из большого числа станций. Обычным способом является то, что персонал по эксплуатации и техническому обслуживанию несет с собой сканер частот и антенну Яги для проверки базовой станции восходящей связи, чтобы найти источник помех. Коммерческие станции многочисленны, направление и зоны работы неясны, поэтому проверка всех станций восходящей связи отнимает много времени и сил. Кроме того, иногда возникают помехи от псевдобазовых станций, когда источник помех не включен в список целевых базовых станции восходящей связи, такой поиск будет безрезультатным.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0006] Задачей настоящего изобретения является предоставление способа, устройства позиционирования, электронного устройства и носителя данных для определения положения помех сигнала.
[0007] Объекты настоящего изобретения включают способ определения положения помех сигнала, содержащий: получение энергии, обнаруженной блоком ресурсов в каждом трёхмерном подпространстве соответственно; при этом получение трёхмерного подпространства выполнено путем предварительного разделения трёхмерного пространства; проверку наличия энергии, превышающей заранее заданный порог среди множества полученных энергий; получение трёхмерного подпространства, соответствующего энергии, превышающей заранее заданный порог, при наличии энергии, превышающей заранее заданный порог; определение положения помех сигнала в соответствии с полученным трёхмерным подпространством.
[0008] Объекты настоящего изобретения также включают устройство позиционирования, предназначенное для определения положения помех сигнала, содержащее: модуль получения энергии, предназначенный для получения энергии, обнаруженной блоком ресурсов в каждом трёхмерном подпространстве соответственно; при этом получение трёхмерного подпространства выполнено путем предварительного разделения трёхмерного пространства; модуль обнаружения, предназначенный для проверки наличия энергии, превышающей заранее заданный порог, среди множества полученных энергий; модуль получения трёхмерного подпространства, предназначенный для получения трёхмерного подпространства, соответствующего указанной энергии, превышающей заранее заданный порог, при обнаружении энергии, превышающей заранее заданный порог, с помощью модуля обнаружения; модуль позиционирования, предназначенный для определения положения помех сигнала в соответствии с полученным трёхмерным подпространством.
[0009] Объекты настоящего изобретения ещё включают электронное устройство, содержащее: по меньшей мере один процессор; и память, коммуникативно связанную с по меньшей мере одним процессором; при этом в памяти хранятся команды, исполняемые по меньшей мере одним процессором, указанные команды исполняются по меньшей мере одним процессором таким образом, чтобы позволить по меньшей мере одному процессору выполнить описанный выше способ определения положения помех сигнала.
[0010] Объекты настоящего изобретения также включают считываемый компьютером носитель данных, предназначенный для хранения компьютерной программы, причём компьютерная программа выполняется процессором для реализации описанного выше способа определения положения помех сигнала.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] Один или несколько вариантов осуществления изобретения иллюстрируются в качестве примера с помощью изображений на сопроводительных чертежах, которые не являются ограничением вариантов осуществления изобретения.
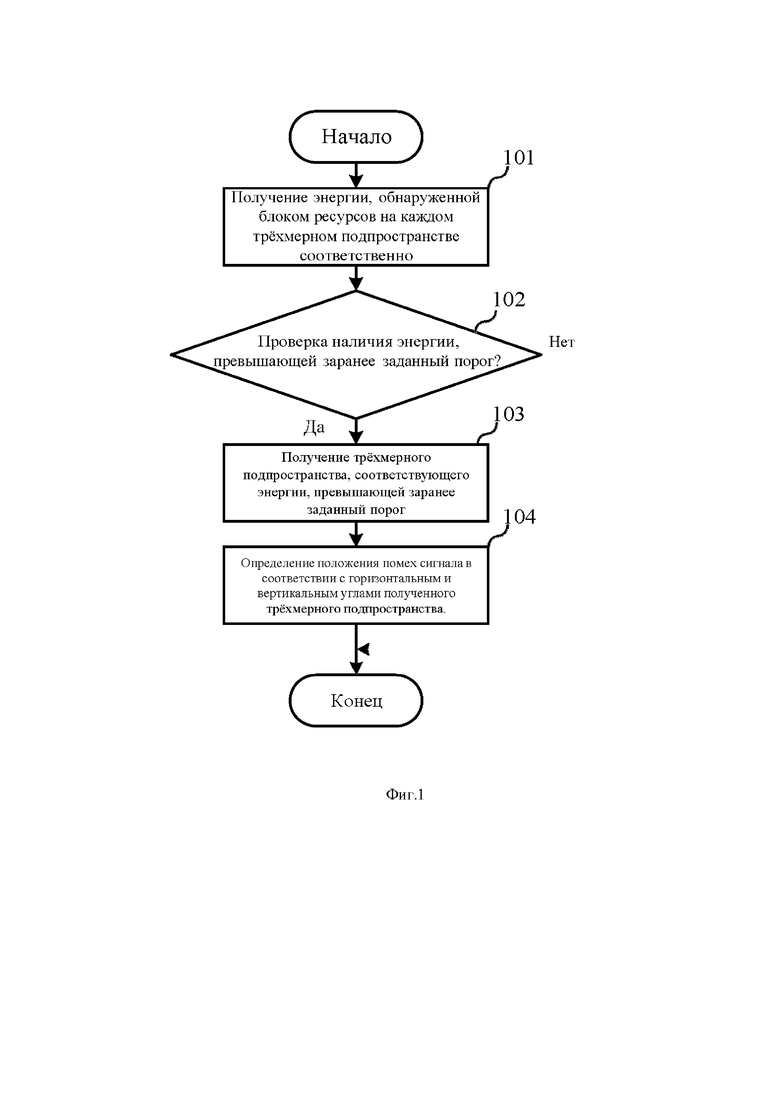
[0012] Фиг. 1. представляет собой блок-схему реализации предложенного способа определения положения помех сигнала в первом варианте осуществления настоящего изобретения;
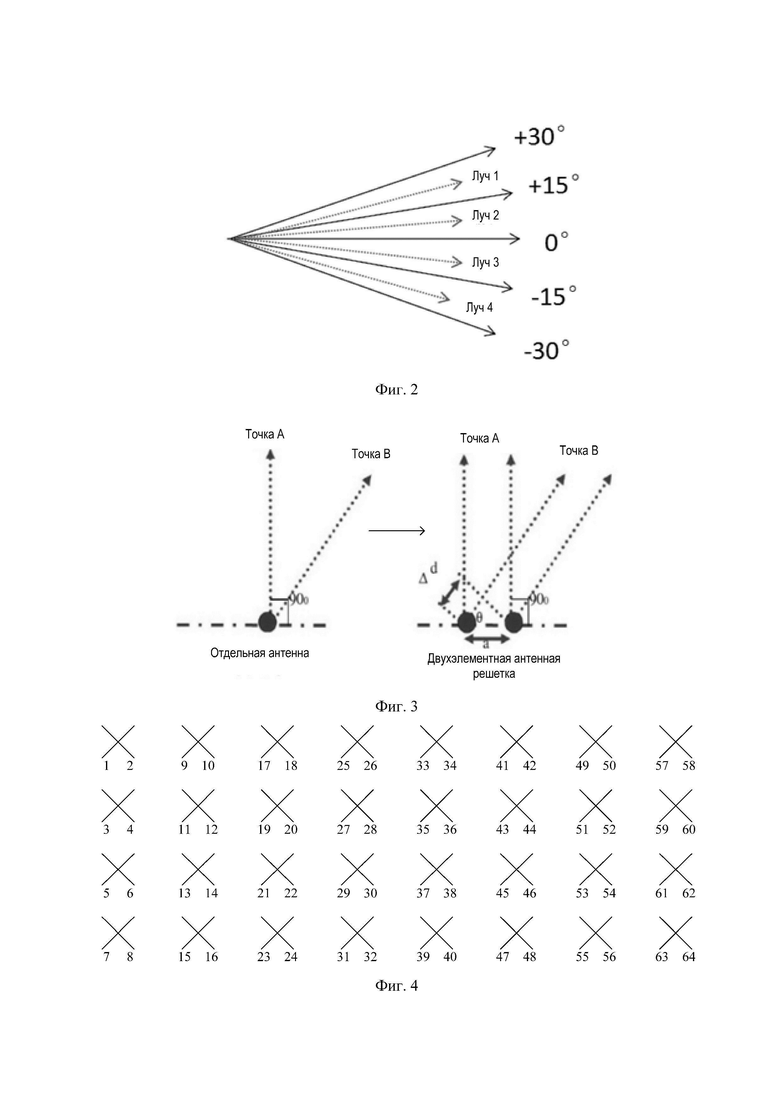
[0013] фиг. 2 представляет собой схему разделения пространства сканирования в первом варианте осуществления настоящего изобретения;
[0014] фиг. 3 представляет собой схему разности хода волны и направляющего вектора в первом варианте осуществления настоящего изобретения;
[0015] фиг. 4 представляет собой принципиальную схему двухполяризованной антенны в первом варианте осуществления настоящего изобретения;
[0016] фиг. 5. представляет собой блок-схему способа определения положения помех сигнала в втором варианте осуществления настоящего изобретения;
[0017] фиг. 6. представляет собой структурную схему устройства позиционирования, предназначения для определения положения помех сигнала в третьем варианте осуществления настоящего изобретения;
[0018] фиг. 7 представляет собой структурную схему электронного устройства в третьем варианте осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0019] Для того, чтобы сделать более понятными задачи, технические решения и преимущества вариантов осуществления настоящего изобретения, все варианты осуществления настоящего изобретения подробно описаны ниже в сочетании с сопроводительными чертежами. Однако специалистам в данной области будет понятно, что в различных вариантах осуществления настоящего изобретения многие технические детали представлены для того, чтобы читатели могли лучше понять настоящеее изобретение. Однако даже без этих технических деталей и различных вариаций и модификаций, основанных на каждом из следующих вариантов воплощения, могут быть получены технические решения, включенные в объем настоящего изобретения. Разделы следующих вариантов осуществления приведены для удобства описания и не являются ограничением конкретных вариантов осуществления настоящего изобретения, которые могут быть объединены и упомянуты в сочетании друг с другом, при условии, что они не противоречат друг другу.
[0020] Первый вариант осуществления настоящего изобретения относится к способу определения положения помех сигнала. В частности, этот вариант осуществления используется в базовой станции, предназначается для получения энергии, обнаруженной блоком ресурсов на каждом трёхмерном подпространстве, содержит следующие этапы: получение указанного трёхмерного подпространства путём предварительного разделения трёхмерного пространства; проверку наличия энергии, превышающей заранее заданный порог, среди множества полученных энергий; получение трёхмерного подпространства, соответствующего энергии, превышающей заранее заданный порог, при наличии энергии, превышающей заранее заданный порог; определение положения помех сигнала в соответствии с полученным трёхмерным подпространством. Положение помех сигнала может быть точно определено путем предварительного разделения трёхмерного пространства, приема сигналов наведения по лучу в разных направлениях на различных пространствах и вычисления значения энергии каждого подпространства для проверки на наличие помех и пространственного положения источника помех, нет необходимости вручную проверять наличие помех сигнала во всех станциях восходящей связи, что экономит рабочую силу и повысит эффективность обнаружения места помех сигнала. Далее приводится конкретное описание деталей реализации способа определения положения помех сигнала в настоящем варианте осуществления. Следующее содержание предоставлено только для удобства понимания и не является необходимым для реализации этого решения, конкретный процесс показан на фиг. 1.
[0021] На этапе 101 получается соответственно энергия, обнаруженная блоком ресурсов на каждом трёхмерном подпространстве.
[0022] В частности, для автоматического определения пространственного положения источника помех сигнала в базовой станции, в этом варианте осуществления каждое трёхмерное подпространство получается путем предварительного деления трёхмерного пространства, то есть DOA (Direction Of Arrival) пространства сканирования делится на X горизонтальных и Y вертикальных направлений, в общей сложности X * Y = Z подпространств могут быть разделены. Взяв в качестве примера вертикальные направления, диапазон охвата составляет от -30° до 30°, диапазон охвата можно поровну разделить на 4 сектора. Четыре сканирующих луча показаны пунктирными стрелками на фиг. 2, указывающими на центр сектора, таким образом, угол сканирования θ = -22.5° : 15° : 22.5°. На этапе получаются соответствующие энергии, обнаруженные блоком ресурсов в подпространствах Z.
[0023] В одном конкретном примере создается трёхмерная система координат, при этом центр панели антенны базовой станции используется в качестве центра трёхмерных координат, чтоб определять координаты антенны базовой станции P(m, n):
 ,
,
где dH - расстояние между горизонтально расположенными элементами решётки, dV - расстояние между вертикально расположенными элементами решётки, n - число столбцов антенной решётки, m - число строк антенной решётки, P(m, n) - положение антенны на строке m и столбце n.
[0024] Вычисляется разность фаз Vm,n на каждом трёхмерном подпространстве в соответствии с координатами антенны базовой станции:
 =
=

где d(θ, ϕ) - разность хода волны, а j - мнимая единица (например, число z = a + b * j называется комплексным числом, где a - реальная часть, b - мнимая часть, а j - мнимая единица); λ - длина волны, θ - индекс вертикального угла, а ϕ - индекс горизонтального угла. Разность хода волны показывает, что лучи в определенном направлении имеют разное расстояние до разных элементов антенны, таким образом определенная разность фаз также различна. Как показано на фиг. 3, для соответственной антенны разность хода волны луча в заданном направлении, прибывающего в антенну, представляет собой фиксированное значение, составляет 0, но для двухэлементной антенной решётки на правой стороне фиг. 3, разность хода волны луча в заданном направлении, прибывающий в антенну1 и антенну2, различна, поэтому разность фаз также различна, Вектор, образованный разностью фаз, называется направляющим вектором, как показано на фиг. 3, разность хода волны в точке A  разность фаз в точке A
разность фаз в точке A  ; разность хода волны в точке B
; разность хода волны в точке B  ; разность фаз в точке B
; разность фаз в точке B  . Поэтому, в соответствии с разностью фаз Vm,n в каждом трёхмерном подпространстве получается направляющий вектор в каждом трёхмерном подпространстве:
. Поэтому, в соответствии с разностью фаз Vm,n в каждом трёхмерном подпространстве получается направляющий вектор в каждом трёхмерном подпространстве:
 .
.
[0025] Получается направляющий вектор в каждом трёхмерном подпространстве посредством построения координат антенны базовой станции и вычисления разности фаз на основе разности хода волны, так что варианты осуществления настоящего изобретения можно гибко применять, не ограничиваясь сценариями применения.
[0026] В варианте осуществления мощность, обнаруженная блоком ресурсов на каждом трёхмерном подпространстве, может быть рассчитана соответственно по следующей формуле:
 .
.
где rbIdx - индекс блока ресурсов, θ - индекс вертикального угла, ϕ - индекс горизонтального угла, NI - последовательность шума блока ресурсов, antidx - индекс антенны, antNum - общее число антенн, a - направляющий вектор трёхмерного подпространства.
[0027] Можно точно получить энергию, обнаруженную блоком ресурсов на каждом трёхмерном подпространстве в соответствии с вышеприведённой формулой.
[0028] На этапе 102 определяется, существует ли энергия, превышающая заранее заданный порог, среди множества полученных энергий. Если существует энергия, превышающая заранее заданный порог, то есть источник помех, а направлением источника помех является трёхмерное подпространство, соответствующее энергии, превышающей заранее заданный порог, и переходят к этапу 103; если нет энергии, превышающей заранее заданный порог, то источника помех нет, завершают этот процесс. Заранее заданный порог может быть установлен в соответствии с эмпирическим значением, и здесь не приводится конкретный пример. Если на практике существует несколько энергий, превышающих установленный порог, то направление с наибольшей энергией представляет собой направление источника помех, то есть
 ,
,
 .
.
[0029] На этапе 103 получается трёхмерное подпространство, соответствующее энергии, превышающей заранее заданный порог. Поскольку лучи в заданном направлении, прибывающие в разные антенны, имеют разные разности хода волны, это приводит к отличию разности фаз, в частности, приводит к отличию энергий, генерируемых источником помех на разных трёхмерных подпространствах. Таким образом, на этом этапе получается энергия, обнаруженная на каждом трёхмерном подпространстве путем корреляционного анализа канала в соответствии с заранее сохраненными направляющими векторами каждого трёхмерного подпространства; Сопоставляется указанная энергия, полученная на каждом полученном трёхмерном подпространстве, с энергией, превышающей заранее заданный порог; В качестве трехмерного подпространства, соответствующего энергии, превышающей заранее заданный порог используется трехмерное подпространство, соответствующее энергии, совпадающей с энергией, превышающей заранее заданный порог, и получается значение θ, значение ϕ трёхмерного подпространства, соответствующего энергии, превышающей заранее заданный порог.
[0030] Далее, на этапе 104, положение помех сигнала определяется в соответствии с горизонтальными и вертикальными углами полученного трёхмерного подпространства.
[0031] Поскольку на этапе 101 уже получалась энергия, обнаруженная блоком ресурсов на каждом трёхмерном подпространстве, на этапе 102 определяется, существует ли помеха, затем определяется энергия трёхмерного подпространства, на которую воздействует помеха, то есть определяется энергия, превышающая заранее заданный порог. На этапе 103 направление, в котором находится положение помех сигнала, может быть быстро, точно определено следующим способом: в соответствии с заранее сохраненными направляющими векторами каждого трёхмерного подпространства и в сочетании с фактической обнаруженной энергией, превышающей заранее заданный порог, в обратном порядке выведется значение θ, значение ϕ трёхмерного подпространства, соответствующего энергии, превышающей заранее заданный порог. Настоящий вариант серьезно повышает эффективность обнаружения положения помех сигнала. Настоящий вариант осуществления описан ниже на конкретном примере:
[0032] Возьмем в качестве примера двухполяризационную антенну 4*8 базовой станции 5G, показанную на фиг. 4, расстояние между горизонтально расположенными элементами решётки равно dH, расстояние между вертикально расположенными элементами решётки равно dV, элементы решётки расположены в прямоугольной форме, а число антенн принимается равным 64. Перед определением положения помех сигнала предварительно выполняется построение таблицы векторной форме. Размерность трёхмерного направляющего вектора составляет  , где число горизонтальных углов - X, число вертикальных углов - Y, число антенн - 64, то есть в общей сложности существует X * Y * 64 форм комплексного числа, θ - индекс вертикального угла, ϕ - индекс горизонтального угла, akRx - индекс антенны. Взяв в качестве примера координаты Q(16,13), которые хранятся в векторной форме, размер целого файла составляет X * Y * 64, реальная часть и мнимая часть хранятся соответственно, 13 старших битов являются реальной частью, 13 младших битов являются мнимой частью, а порядок индексов хранения - сначала индекс горизонтального угла, затем индекс вертикального угла, и, наконец, индекс антенны. Определение положения помех сигнала описано ниже:
, где число горизонтальных углов - X, число вертикальных углов - Y, число антенн - 64, то есть в общей сложности существует X * Y * 64 форм комплексного числа, θ - индекс вертикального угла, ϕ - индекс горизонтального угла, akRx - индекс антенны. Взяв в качестве примера координаты Q(16,13), которые хранятся в векторной форме, размер целого файла составляет X * Y * 64, реальная часть и мнимая часть хранятся соответственно, 13 старших битов являются реальной частью, 13 младших битов являются мнимой частью, а порядок индексов хранения - сначала индекс горизонтального угла, затем индекс вертикального угла, и, наконец, индекс антенны. Определение положения помех сигнала описано ниже:
[0033] Можно привести в пример полосу пропускания 100 Мбит/с, где NI - шумовая последовательность блоков ресурсов (RB), размерность - число RB, число антенн, т.е. 273*64. rbIdx - индекс RB, ϕ - индекс горизонтального угла, θ - индекс вертикального угла.
[0034] Псевдокоды соответствующей энергии выглядят следующим образом.
 %
%


 end
end
end
end
[0035] В частности, при вычислении  координаты направляющего вектора
координаты направляющего вектора  равны Q (16, 13), координаты направляющего вектора
равны Q (16, 13), координаты направляющего вектора  равны Q (16, 15), операция сложения двух чисел приводит к росту выходной разрядности на 2 бита, а результат умножения равен Q(32, 30), накапливают 64 числа, переносят на 6 бит, поэтому в середине используется 40-битный аккумулятор, а затем накопленный результат сдвигается вправо на 6+ 13 бит, что представлено Q (16, 11):
равны Q (16, 15), операция сложения двух чисел приводит к росту выходной разрядности на 2 бита, а результат умножения равен Q(32, 30), накапливают 64 числа, переносят на 6 бит, поэтому в середине используется 40-битный аккумулятор, а затем накопленный результат сдвигается вправо на 6+ 13 бит, что представлено Q (16, 11):
 .
.
где размерность  = горизонтальный угол * вертикальный угол * число RB, общий размер составляет X * Y * 273 энергий.
= горизонтальный угол * вертикальный угол * число RB, общий размер составляет X * Y * 273 энергий.
[0036] После получения обнаруженной энергии блоком ресурсов на каждом трёхмерном подпространстве вычисляется  , координаты
, координаты  составляют Q(16,11), возводится в квадрат комплексное число, переносится на 2 биты, получаются координаты Q(32,24),
составляют Q(16,11), возводится в квадрат комплексное число, переносится на 2 биты, получаются координаты Q(32,24),  , наконец получается значение θ и значение ϕ, превышающее заранее заданный порог помех. Энергия, превышающая порог помех Th, считается помеховой ситуацией. В соответствии с информацией о горизонтальном и вертикальном углах (θ, ϕ) рассчитывается положение помех, а также получается и выводится результат обнаружения помех.
, наконец получается значение θ и значение ϕ, превышающее заранее заданный порог помех. Энергия, превышающая порог помех Th, считается помеховой ситуацией. В соответствии с информацией о горизонтальном и вертикальном углах (θ, ϕ) рассчитывается положение помех, а также получается и выводится результат обнаружения помех.
[0037] В этом варианте осуществления определяется наличие помех сигнала в пространстве и его положение путем предварительного разделения трёхмерного пространства, приема сигналов наведения по лучу в разных направлениях на различных пространствах, вычисления значения энергии в каждом подпространстве. Этот вариант позволяет автоматически определять положение помех, заменяет трудовые ресурсы алгоритмами, устраняет необходимость вручную проверять все базовые станции восходящей связи, экономит время персонала по эксплуатации и обслуживанию базовой станции для определения положения помех сигнала, и повышает эффективность устранения межсистемных помех.
[0038] Более того, поскольку лучи в заданном направлении, прибывающие в разные антенны, имеют разные разности хода волны, что приводит к отличию разности фаз, в частности, приводит к отличию энергий, генерируемых источником помех на разных трёхмерных подпространствах. Сначала получается энергия всех подпространств путем корреляционного анализа канала в соответствии с заранее сохраненными направляющими векторами каждого трёхмерного подпространства, затем определяется подпространство, соответствующее энергии, превышающей заранее заданный порог, путем сопоставления с фактически измеренной энергией, превышающей заранее заданный порог. Указанное определенное подпространство является направлением помех. Этот способ позволяет быстро определять положение помех, что дополнительно повышает эффективность определения положения помех сигнала.
[0039] Поскольку каждое трехмерное подпространство соответствует горизонтальному углу и вертикальному углу, и положение помех сигнала может быть легко и эффективно определено в соответствии с горизонтальным и вертикальным углами.
[0040] Второй вариант осуществления настоящего изобретения относится к способу определения положения помех сигнала. Второй вариант осуществления дополнительно улучшается на основе первого варианта осуществления, причем основное улучшение заключается в том, что во втором варианте осуществления настоящего изобретения источник помех сигнала дополнительно сканируется и находится посредством перемещения. В частности, перемещается на заранее заданное расстояние в направление трёхмерного подпространства, соответствующего энергии, превышающей заранее заданный порог, затем определяется, правильно ли направление перемещения в зависимости от того, увеличивается ли энергия, обнаруженная блоком ресурсов на трёхмерном подпространстве после перемещения; если направление перемещения правильно, затем записывается текущее положение как наилучшее положение помех сигнала и продолжается перемещение на заранее заданное расстояние в направление перемещения и повторяется операция, определяется правильность направления перемещения в зависимости от того, увеличивается ли энергия, обнаруженная блоком ресурсов на трёхмерном подпространстве после перемещения; если направление перемещения неверное, отрегулируется направление перемещения для перемещения и повторяется операция, затем определяется, правильно ли направление перемещения в зависимости от того, увеличивается ли энергия, обнаруженная блоком ресурсов на трёхмерном подпространстве после перемещения. За положение помех сигнала принимается последнее зарегистрированное наилучшее положение помех сигнала. При этом после каждой корректировки направления перемещения число корректировок направления перемещения увеличивается на 1; после каждого определения правильного направления перемещения накопленное число корректировок сбрасывается на ноль; и когда накопленное число корректировок достигает заранее заданного порога корректировки, за положение помех сигнала принимается последнее зарегистрированное наилучшее положение помех сигнала.
[0041] Конкретный процесс показан на фиг. 5. На этапе 501 получается энергия, обнаруженная блоком ресурсов на каждом трёхмерном подпространстве, этот этап аналогичен этапу 101 и не будет здесь повторяться.
[0042] На этапе 502 определяется, существует ли энергия, превышающая заранее заданный порог среди множества полученных энергий. Если существует энергия, превышающая заранее заданный порог, то есть источник помех сигнала, и направление помех является трёхмерным подпространством, соответствующим энергии, превышающей заранее заданный порог, и переходят к этапу 503; если нет энергии, превышающей заранее заданный порог, то источника помех нет, завершают этот процесс. Этот этап аналогичен этапу 102 и не будет здесь повторяться.
[0043] На этапе 503 получается трёхмерное подпространство, соответствующее энергии, превышающей заранее заданный порог, т.е. получается значение θ, значение ϕ трёхмерного подпространства, соответствующего энергии, превышающей заранее заданный порог. Конкретный способ получения аналогично этапу 103 и не будет здесь повторяться.
[0044] На этапе 504 направление перемещения определяется в соответствии с информацией о горизонтальном угле и вертикальном угле (θ, ϕ), полученной на этапе 503.
[0045] На этапе 505 выполняется перемещение на расстояние в направлении перемещения, например, перемещение на 10 метров.
[0046] На этапе 506 определяется, увеличивается ли энергия помех сигнала, то есть определяется, увеличивается ли энергия, обнаруженная блоком ресурсов на трёхмерном подпространстве после перемещения. Если энергия помех сигнала увеличивается, то перемещение осуществляется в правильном направлении и переходят к этапу 507; если энергия помех сигнала ослабляется, перемещение осуществляется в неправильном направлении и переходят к этапу 509.
[0047] На этапе 507 продолжается перемещение на заранее заданное расстояние в правильном направлении перемещения, например, продолжается перемещение на 10 метров в горизонтальном направлении или на 10 метров в вертикальном направлении, число корректировок направления перемещения сбрасывается на ноль и переходят к этапу 508.
[0048] На этапе 508 текущее положение записывается как наилучшее положение помех сигнала, например, горизонтальные и вертикальные координаты текущего положения записываются как наилучшее положение помех сигнала, и после этапа 508 процесс возвращается к этапу 506.
[0049] Если на этапе 506 установлено, что энергия помех сигнала не увеличивается, это обозначает неправильное направление перемещения, затем переходят к этапу 509, чтобы определить, достигает ли число корректировок заданного порога корректировки. Заданный порог корректировки может быть установлен в соответствии с эмпирическим значением, например, установленным равным 10. Если заранее заданный порог корректировки не достигнут, переходят к этапу 510; если заранее заданный порог корректировки достигнут, переходят к этапу 512.
[0050] На этапе 510 накапливается число корректировок направления перемещения, например, число корректировок направления перемещения увеличивается на 1, и процесс переходит к этапу 511.
[0051] На этапе 511 отрегулируется направление перемещения, выполняют перемещение на заранее заданное расстояние в скорректированном направлении и после перемещения возвращаются к этапу 506.
[0052] Если на этапе 509 установлено, что число корректировок достигло заданного порога корректировки, переходят к этапу 512: за положение помех сигнала принимается последнее зарегистрированное наилучшее положение помех сигнала.
[0053] То есть, в данном варианте осуществления, значение θ и значение ϕ трёхмерного подпространства, соответствующего энергии, превышающей заранее заданный порог, используются в качестве опоры направления перемещения. После каждого перемещенного расстояния определяется, увеличивается ли энергия помех сигнала. Если энергия помех сигнала увеличена, это означает, что перемещение происходит в правильном направлении и продолжается перемещение вперед, при этом число направлений корректировки устанавливают равным нулю и записывается текущее положение (горизонтальную координату, вертикальную координату) как наилучшее положение близко источника помех сигнала; если энергия помех сигнала ослаблена, это означает, что перемещение не приводит к приближению к источнику помех и нуждается в регулировке. Предложив, что максимальное допустимое число попыток корректировки направления составляет n, перед каждой корректировкой определяют, достигнут ли верхний предел числа попыток корректировки направления, если нет, отрегулировать направление один раз, если он был достигнут, выбирают наилучшее зарегистрированное положение и записывают его как положение источника помех.
[0054] В этом варианте осуществления трёхмерное подпространство, соответствующее энергии, превышающей заранее заданный порог, используется в качестве опоры направления перемещения, и к положению источника помех можно постепенно приближаться путем перемещения источника принятого сигнала, а положение источника помех можно быть дополнительно точно определено. Кроме того, путем установки максимального значения числа корректировок, сброса числа корректировок на ноль при правильном выборе направления перемещения и увеличения числа корректировок на 1 при выборе неправильного направления перемещения можно быстро приблизиться к точному положению помех сигнала после ограниченного числа корректировок.
[0055] Этапы вышеупомянутых различных способов разделены только с целью ясного описания, при осуществлении они могут быть объединены в один этап, или некоторый этап может быть разделен и разложен на несколько этапов. При условии, что они включают одну и ту же логическую связь, все они находятся в пределах объема охраны настоящего патента; добавление незначительных модификаций в алгоритм или процесс или введение незначительных конструкций, но не изменение основной конструкции алгоритма и процесса, находятся в пределах объема охраны настоящего патента. Объем охраны патента распространяется на добавление незначительных модификаций в алгоритм или процесс или введение незначительных конструкций, которые не изменяют основную конструкцию алгоритма или процесса.
[0056] Третий объект настоящего изобретения относится к устройству позиционирования, предназначенному для определения положения помех сигнала, как показано на фиг. 6, содержащему:
[0057] модуль получения энергии 601, предназначенный для получения энергии, обнаруженной блоком ресурсов на каждом трёхмерном подпространстве, при этом трёхмерное подпространство получается путем предварительного разделения трёхмерного пространства;
[0058] модуль обнаружения 602, предназначенный для проверки наличия энергии, превышающей заранее заданный порог, среди множества полученных энергий;
[0059] модуль получения трёхмерного подпространства 603, предназначенный для получения трёхмерного подпространства с указанной энергией, превышающей заранее заданный порог, когда модуль обнаружения обнаруживает наличие в подпространстве энергии, превышающей заранее заданный порог;
[0060] модуль позиционирования 604, предназначенный для определения положения помех сигнала в соответствии с полученным трёхмерным подпространством.
[0061] В одном конкретном примере модуль получения энергии 601 специально выполнен для вычисления мощности, обнаруженной блоком ресурсов на каждом трёхмерном подпространстве, в соответствии со следующей формулой:
,
где rbIdx - индекс блока ресурсов, θ - индекс вертикального угла, ϕ - индекс горизонтального угла, NI - последовательность шума блока ресурсов, antidx - индекс антенны, antNum - общее число антенн, a - направляющий вектор трёхмерного подпространства.
[0062] В одном конкретном примере направляющий вектор трёхмерного подпространства получается следующим способом:
[0063] Построение трёхмерной системы координат с центром панели антенны базовой станции в качестве центра трёхмерных координат, чтоб определять координаты антенны базовой станции.
[0064] Вычисление разности фаз Vm,n на каждом из указанных трёхмерных подпространств в соответствии с указанными координатами антенны базовой станции для получения направляющего вектора на каждом из указанных трёхмерных подпространств:
(a),
при этом указанная разность фаз рассчитывается по следующей формуле:
=,
где d(θ,ϕ) - разность хода волны, j - мнимая единица (например, число z=a+b*j называется комплексным числом, где a - реальная часть, b - мнимая часть и j - мнимая единица); λ - длина волны, dH - расстояние между горизонтально расположенными элементами решётки, dV - расстояние между вертикально расположенными элементами, n - число столбцов в антенной решетке и m - число строк в антенной решетке.
[0065] В одном конкретном примере модуль позиционирования 604 предназначается для определения положения помех сигнала в соответствии с горизонтальными и вертикальными углами полученного трёхмерного подпространства.
[0066] В одном конкретном примере модуль позиционирования 604 предназначается для перемещения на заранее заданное расстояние в направлении полученного трёхмерного подпространства; проверяется на правильность направления перемещения в зависимости от того, увеличивается ли энергия, обнаруженная указанным блоком ресурсов в указанном трёхмерном подпространстве после перемещения. Если направление перемещения правильное, текущее положение записывается как наилучшее положение помех сигнала, и продолжается перемещение на заранее заданное расстояние в указанном направлении перемещения, повторяется операция, проверяется на правильность направления перемещения в зависимости от того, увеличивается ли энергия, обнаруженная указанным блоком ресурсов в указанном трёхмерном подпространстве после перемещения. Если направление перемещения неправильное, отрегулируется направление перемещения, повторяется проверка правильности направления перемещения в зависимости от того, увеличивается ли энергия, обнаруженная указанным блоком ресурсов в указанном трёхмерном подпространстве после перемещения. Используется зарегистрированное наилучшее положение помех сигнала в качестве положения помех сигнала.
[0067] В одном конкретном примере после каждой корректировки направления перемещения, число корректировок направления перемещения увеличивается на 1; после каждого определения того, что направление перемещения правильное, сбрасывается накопленное число корректировок на ноль; и когда накопленное число корректировок достигает заданного порога корректировки, в качестве положения помех сигнала используется последнее зарегистрированное лучшее положение помех сигнала.
[0068] В одном конкретном примере модуль получения трёхмерного подпространства 603 специально используется для получения энергии, полученной на каждом трёхмерном подпространстве путем корреляционного анализа канала в соответствии с заранее сохраненными направляющими векторами каждого трёхмерного подпространства; сопоставления указанной энергии, полученной на каждом полученном трёхмерном подпространстве, с энергией, превышающей заранее заданный порог; использования трёхмерного подпространства, соответствующего энергии, совпадающей с энергией, превышающей заранее заданный порог, в качестве трёхмерного подпространства, соответствующего энергии, превышающей заранее заданный порог.
[0069] Нетрудно обнаружить, что этот объект осуществления является примером осуществления устройства, упомянутого в первом или втором вариантах осуществления, этот объект осуществления может быть реализован в сочетании с первым или вторым вариантом осуществления. Соответствующие технические детали, упомянутые в первом или втором варианте осуществления изобретения, по-прежнему действительны в настоящем объекте осуществления изобретения и подробности не будут повторяться здесь. Соответственно, соответствующие технические детали, упомянутые в настоящем объекте осуществления, также могут быть применены в первом или втором варианте осуществления.
[0070] Следует отметить, что все модули, упомянутые в этом объекте осуществления, являются логическими модулями. В практических приложениях логический элемент может быть физическим, частью физического элемента или комбинацией нескольких физических элементов. Кроме того, чтобы подчеркнуть инновационную часть настоящего изобретения, в этом объекте осуществления не описаны элементы, которые не имеют тесного отношения к решению технической проблемы, поднятой в настоящей заявке, но это не означает, что в этом нет других элементов.
[0071] Четвертый объект осуществления настоящего изобретения относится к электронному устройству, содержащему, как показано на фиг. 7, по меньшей мере один процессор и, память, коммуникативно связанную с по меньшей мере одним процессором; при этом в памяти хранятся команды, исполняемые по меньшей мере одним процессором, указанная команда исполняется по меньшей мере одним процессором, чтобы позволить по меньшей мере одному процессору выполнить указанный способ определения положения помех сигнала.
[0072] Более того, память и процессор соединены посредством шины, которая может включать любое число взаимосвязанных шин и мостов, и шина соединяет вместе различные схемы одного или нескольких процессоров и памяти. Шина также может соединять различные другие схемы, такие как периферийные устройства, регуляторы напряжения и схемы управления питанием, все из которых хорошо известны в данной области и поэтому не будут описаны далее в настоящем документе. Интерфейс шины предлагают интерфейс между шиной и приемопередатчиком. Приемопередатчик может представлять собой один элемент или множество элементов, например, множество приемников и передатчиков, обеспечивающих связь с различными другими устройствами по передающей среде. Данные, обрабатываемые процессором, передаются по беспроводной среде через антенну, и далее антенна также принимает данные и передает данные процессору.
[0073] Процессор предназначается для управления шиной и обычной обработки данных, а также может обеспечивать различные функции, включая синхронизацию, периферийные интерфейсы, регулирование напряжения, управление питанием и другие функции управления. Память может использоваться для хранения данных, используемых процессором при выполнении операций.
[0074] Пятый объект осуществления настоящего изобретения относится к считываемому компьютером носителю данных, предназначенному для хранения компьютерной программы. Вышеупомянутые варианты осуществления способа реализуются, когда компьютерная программа выполняется процессором.
[0075] То есть специалистам в данной области техники понятно, что все или некоторые из этапов способа реализации вышеприведенных вариантов осуществления могут быть выполнены с помощью программы, которая отправляет команды в соответствующие аппаратные средства. Указанная программа хранится на носителе данных, включает ряд команд, позволяющих устройству (которое может быть микроконтроллером, чипом и т.д.) или процессору (processor) выполнять все или некоторые из этапов способа в различных вариантах осуществления настоящего изобретения. Вышеупомянутый носитель данных включает: U-диск, мобильный жесткий диск, постоянное запоминающее устройство (ROM, Read-Only Memory), оперативное запоминающее устройство (RAM, Random Access Memory), магнитный диск или оптический диск и другие носители, на которых могут храниться программные коды.
[0076] Специалистам в данной области понятно, что каждый из вышеупомянутых объектов осуществления представляет собой конкретный пример реализации настоящего изобретения, и что при практическом применении в них могут быть сделаны различные изменения в форме и деталях без отклонения от духа сущности и объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ СВЯЗЬЮ, СПОСОБ УПРАВЛЕНИЯ СВЯЗЬЮ, УСТРОЙСТВО РАДИОСВЯЗИ И СПОСОБ РАДИОСВЯЗИ | 2014 |
|
RU2654204C2 |
| ОЦЕНКА МОЩНОСТИ ШУМА В СИСТЕМАХ БЕСПРОВОДНОЙ СВЯЗИ | 2013 |
|
RU2563888C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕКЛЮЧЕНИЯ КАНАЛОВ СВЯЗИ МЕЖДУ СОСЕДНИМИ ЗОНАМИ ОБСЛУЖИВАНИЯ В СИСТЕМАХ СВЯЗИ | 1997 |
|
RU2180159C2 |
| СПОСОБ, СИСТЕМА И УСТРОЙСТВО ПЕРЕДАЧИ СИГНАЛА | 2013 |
|
RU2589314C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СВЯЗЬЮ, СПОСОБ УПРАВЛЕНИЯ СВЯЗЬЮ, ПРОГРАММА И СИСТЕМА УПРАВЛЕНИЯ СВЯЗЬЮ | 2013 |
|
RU2622042C2 |
| СПОСОБ ПЕРЕДАЧИ ЗОНДИРУЮЩЕГО ОПОРНОГО СИГНАЛА, СПОСОБ И СИСТЕМА СВЯЗИ И КОМПЬЮТЕРНО-ЧИТАЕМЫЙ НОСИТЕЛЬ | 2023 |
|
RU2811077C1 |
| ОБНАРУЖЕНИЕ СОТЫ ПРИ ПОМОЩИ ПОДАВЛЕНИЯ ПОМЕХ | 2009 |
|
RU2468533C2 |
| УСТРОЙСТВО БАЗОВОЙ СТАНЦИИ, ТЕРМИНАЛЬНОЕ УСТРОЙСТВО И СПОСОБ СВЯЗИ | 2018 |
|
RU2773243C2 |
| УПРАВЛЕНИЕ МОЩНОСТЬЮ С ПОМОЩЬЮ МЕТОДИК СТИРАНИЯ | 2005 |
|
RU2371862C2 |
| ВЫБОР РЕСУРСА ДЛЯ ОБНАРУЖЕНИЯ И СВЯЗИ ОТ УСТРОЙСТВА К УСТРОЙСТВУ | 2015 |
|
RU2643349C1 |


Изобретение относится к технике связи и может использоваться в системах мобильной связи для определения положения помех. Технический результат состоит в определении положения помех в трехмерном пространстве. Для этого энергию обнаруживают блоком ресурсов в каждом трёхмерном подпространстве, выполняют построение трехмерной системы координат с центром панели антенны базовой станции в качестве центра трехмерных координат, чтобы определять координаты антенны базовой станции, выполняют вычисление разности фаз в соответствии с указанными координатами антенны базовой станции для получения направляющего вектора на каждом из указанных трехмерных подпространств 4 н. и 6 з.п. ф-лы, 7 ил.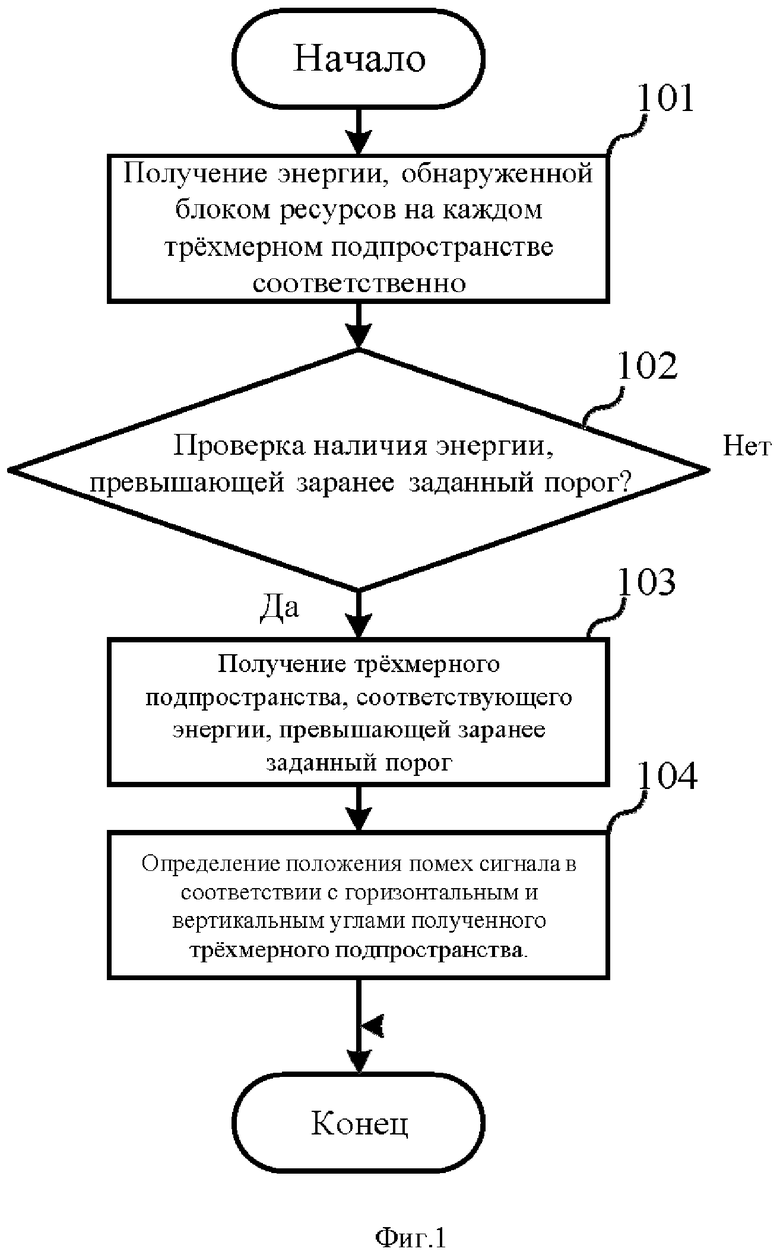
1. Способ определения положения помех сигнала, содержащий;
получение энергии, обнаруженной блоком ресурсов в каждом трехмерном подпространстве соответственно; при этом указанное трехмерное подпространство получено путем предварительного деления трехмерного пространства,
проверку наличия энергии, превышающей заранее заданный порог, среди множества полученных энергий,
получение трехмерного подпространства с указанной энергией, превышающей заранее заданный порог, при наличии энергии, превышающей заранее заданный порог,
определение положения помех сигнала в соответствии с полученным трехмерным подпространством.
2. Способ определения положения помех сигнала по п. 1, отличающийся тем, что получение энергии, обнаруженной блоком ресурсов на каждом трехмерном подпространстве, содержит: вычисление энергии, обнаруженной блоком ресурсов на каждом трехмерном подпространстве, в соответствии со следующей формулой:

где rbIdx - индекс блока ресурсов, θ - индекс вертикального угла, ϕ - индекс горизонтального угла, NI - последовательность шума блока ресурсов, antidx - индекс антенны, antNum - общее число антенн, а - направляющий вектор трехмерного подпространства.
3. Способ определения положения помех сигнала по п. 2, отличающийся тем, что направляющий вектор трехмерного подпространства получают следующим способом:
выполняют построение трехмерной системы координат с центром панели антенны базовой станции в качестве центра трехмерных координат, чтоб определять координаты антенны базовой станции,
выполняют вычисление разности фаз Vm,n на каждом из указанных трехмерных подпространств в соответствии с указанными координатами антенны базовой станции для получения направляющего вектора на каждом из указанных трехмерных подпространств по формуле:

при этом, формула расчета разности фаз выглядит следующим образом:

где d(θ, ϕ) - разность хода волны, j - мнимая единица; λ - длина волны, dH - расстояние между горизонтально расположенными элементами решетки, dV - расстояние между вертикально расположенными элементами, n - число столбцов в антенной решетке и m - число строк в антенной решетке.
4. Способ определения положения помех сигнала по п. 1, отличающийся тем, что определение положения помех сигнала в соответствии с полученным трехмерным подпространством содержит:
определение положения помех сигнала в соответствии с полученными горизонтальным углом и вертикальным углом трехмерного подпространства.
5. Способ определения положения помех сигнала по п. 1, отличающийся тем, что определение положения помех сигнала в соответствии с полученным трехмерным подпространством содержит:
перемещение на заданное расстояние в направлении полученного трехмерного подпространства;
проверку правильности направления перемещения, при этом направление является правильным в зависимости от того, увеличивается ли энергия, обнаруженная блоком ресурсов в трехмерном подпространстве, после перемещения;
записывание текущего положения как наилучшего положения помех сигнала при выборе правильного направления, продолжение перемещения на заданное расстояние в направлении перемещения и повторение указанной операции, проверка правильности направления перемещения, при этом направление является правильным в зависимости от того, увеличивается ли энергия, обнаруженная блоком ресурсов в трехмерном подпространстве, после перемещения;
регулировку направления перемещения при выборе правильного направления, повторение указанной операции и проверку правильности направления перемещения, при этом направление является правильным в зависимости от того, увеличивается ли энергия, обнаруженная блоком ресурсов в трехмерном подпространстве, после перемещения;
использование зарегистрированного наилучшего положения помех сигнала в качестве положения помех сигнала.
6. Способ определения положения помех сигнала по п. 5, дополнительно содержащий:
увеличение числа корректировок направления перемещения на 1 после каждой корректировки направления перемещения;
сброс накопленного числа корректировок на ноль после каждого выбора правильного направления перемещения;
использование зарегистрированного наилучшего положения помех сигнала в качестве положения помех сигнала, содержащее следующий этап:
за положение помех сигнала принимают последнее зарегистрированное наилучшее положение помех сигнала после того, как накопленное число корректировок достигло заранее заданного порога корректировки.
7. Способ определения положения помех сигнала по п. 1, отличающийся тем, что получение трехмерного подпространства, соответствующего энергии, превышающей заранее заданный порог, содержит следующие этапы:
получение энергии, обнаруженной в каждом трехмерном подпространстве путем корреляционного анализа канала в соответствии с заранее сохраненными направляющими векторами каждого трехмерного подпространства;
сопоставление полученной энергии, полученной в каждом из трехмерных подпространств, с энергией, превышающей заранее заданный порог;
использование трехмерного подпространства, соответствующего энергии, совпадающей с энергией, превышающей заранее заданный порог, в качестве трехмерного подпространства, соответствующего энергии, превышающей заранее заданный порог.
8. Устройство позиционирования, предназначенное для определения положения помех сигнала, содержащее:
модуль получения энергии, предназначенный для получения энергии, обнаруженной блоком ресурсов в каждом трехмерном подпространстве соответственно; при этом трехмерное подпространство получено путем предварительного разделения трехмерного пространства; модуль обнаружения, предназначенный для проверки наличия энергии, превышающей заранее заданный порог, среди множества полученных энергий;
модуль получения трехмерного подпространства, предназначенный для получения трехмерного подпространства, соответствующего указанной энергии, превышающей заранее заданный порог, когда модуль обнаружения обнаруживает наличие энергии, превышающей заранее заданный порог;
модуль позиционирования, предназначенный для определения положения помех сигнала в соответствии с полученным трехмерным подпространством.
9. Устройство для определения положения помех сигнала, содержащее:
по меньшей мере один процессор; и.
память, коммуникативно связанную с упомянутым по меньшей мере одним процессором; при этом
в указанной памяти хранятся команды, исполняемые указанным по меньшей мере одним процессором, причем указанные команды исполняются указанным по меньшей мере одним процессором, и этот по меньшей мере один процессор сконфигурирован так, чтобы выполнить способ определения положения помех сигнала, описанный в любом из пп. 1-7 формулы.
10. Считываемый компьютером носитель данных, предназначенный для хранения компьютерной программы, причем компьютерная программа выполняется процессором для способа определения положения помех сигнала, описанного в любом из пп. 1-7 формулы.
| CN 105407063 A, 16.03.2016 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| CN 104052700 A, 17.09.2014 | |||
| СПОСОБ АДАПТИВНОГО ОБНАРУЖЕНИЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2144217C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2470318C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА, СПОСОБ ИДЕНТИФИКАЦИИ АБОНЕНТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ И СИСТЕМА РАДИОСВЯЗИ АБОНЕНТОВ С ЦЕНТРАЛЬНОЙ СТАНЦИЕЙ С ИДЕНТИФИКАЦИЕЙ АБОНЕНТОВ И ОПРЕДЕЛЕНИЕМ ИХ МЕСТОПОЛОЖЕНИЯ | 1997 |
|
RU2126174C1 |

