Изобретения относятся к области радиолокации и могут быть использованы в обзорных радиолокационных станциях (РЛС) при сопровождении траекторий целей в стробах.
Известен способ сопровождения траектории цели, включающий излучение в каждом направлении строба сопровождения зондирующих сигналов, прием сигналов от отражающих объектов, отбор сигналов от сопровождаемой цели среди сигналов, обнаруженных в стробе, вычисление сглаженных параметров траектории сопровождаемой цели, экстраполяцию параметров траектории сопровождаемой цели на момент следующего обращения к цели, вычисление положения и размеров строба сопровождения (Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. М., 1993, с.25-30).
РЛС, реализующая известный способ, содержит блок отбора сигналов от цели в стробе сопровождения, блок сглаживания параметров траектории, блок экстраполяции параметров траектории цели, блок вычисления границ строба сопровождения (Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. М., 1993, с.26).
Под стробом сопровождения понимается предварительно рассчитанная трехмерная область в пространстве, в которую с известной достаточно высокой вероятностью попадает цель, движущаяся в направлении и со скоростью, экстраполированными на основе предыдущих данных о цели через интервал времени, равный периоду сопровождения цели (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., 1974, с.199).
Под элементом строба сопровождения понимается пространственная область, размеры которой по углу места, азимуту, дальности равны размерам элементов разрешения по соответствующим координатам.
В известных технических решениях любой принятый в стробе сопровождения сигнал, близкий по структуре к зондирующему сигналу, превысивший порог обнаружения, считается сигналом от цели. Такими сигналами кроме сигналов, отраженных от сопровождаемых целей, являются сигналы от других отражающих объектов: подстилающей поверхности, местных предметов, облачности, облаков дипольных помех, специально создаваемых противником для подавления РЛС. Таким образом, наряду с сопровождаемой целью в стробе сопровождения могут быть обнаружены и цели, случайно попавшие в строб, а также пассивные помехи. Это является недостатком известного способа, поскольку приводит к увеличению количества ложных траекторий и, как следствие, к перегрузке системы обработки радиолокационной информации.
Наиболее близким к заявляемому способу является способ сопровождения траектории цели, включающий излучение в каждом направлении строба сопровождения зондирующих сигналов, прием сигналов от отражающих объектов, отбор в стробе сопровождения сигналов от цели (в ряде источников, например в приведенном далее, операцию отбора сигналов от цели в стробе сопровождения называют селекцией сигналов от цели в стробе сопровождения), вычисление сглаженных параметров траектории сопровождаемой цели (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., 1974, с.284-287).
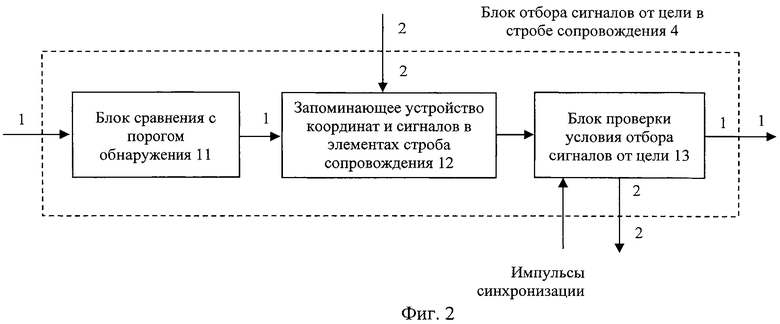
РЛС, реализующая наиболее близкий способ, содержит (фиг.1) антенну 1, антенный переключатель 2, приемник 3, блок отбора сигналов от цели в стробе сопровождения 4, блок проверки критерия сброса траектории с сопровождения 5, блок сглаживания параметров траектории цели 6, блок экстраполяции параметров траектории цели 7, блок вычисления границ строба сопровождения 8, передатчик 9, синхронизатор 10, при этом сигнальный вход-выход антенны 1 соединен со входом-выходом антенного переключателя 2, выход которого соединен с последовательно соединенными приемником 3, блоком отбора сигналов от цели в стробе сопровождения 4, блоком сглаживания параметров траектории цели 6, блоком экстраполяции параметров траектории цели 7 и блоком вычисления границ строба сопровождения 8, выход передатчика 9 соединен со входом антенного переключателя 2, второй выход блока отбора сигналов от цели в стробе сопровождения 4 соединен со входом блока проверки критерия сброса траектории с сопровождения 5, выход которого соединен со вторым входом блока сглаживания параметров траектории цели 6, выход блока сглаживания параметров траектории цели 6 является выходом РЛС, выход блока вычисления границ строба сопровождения 8 соединен с управляющим входом антенны 1 и вторым входом блока отбора сигналов от цели в стробе сопровождения 4, первый, второй, третий и четвертый выходы синхронизатора 10 соединены с синхровходами приемника 3, блока отбора сигналов от цели в стробе сопровождения 4, блока вычисления границ строба 8 и передатчика 9 соответственно, блок отбора сигналов от цели в стробе сопровождения 4 (фиг.2) содержит последовательно соединенные блок сравнения с порогом обнаружения 11, запоминающее устройство координат и сигналов в элементах строба сопровождения 12 и блок проверки условия отбора сигналов от цели 13, при этом вход блока сравнения с порогом обнаружения 11 и второй вход запоминающего устройства координат и сигналов в элементах строба сопровождения 12 являются соответственно первым и вторым входами блока отбора сигналов от цели в стробе сопровождения 4, а первый и второй выходы блока проверки условия отбора сигналов от цели 13 являются соответственно его первым и вторым выходами.
РЛС, реализующая наиболее близкий способ, работает следующим образом.
По командами синхронизатора 10 передатчиком 9 формируется зондирующий сигнал, который посредством антенного переключателя 2 направляется на сигнальный вход антенны 1 и излучается в очередное угловое направление строба сопровождения. Координаты угловых направлений строба сопровождения, которые требуется осмотреть на текущем обзоре, вычислены в блоке вычисления границ строба сопровождения 8 при предыдущем обзоре и записаны в запоминающем устройстве координат и сигналов в элементах строба сопровождения 12 блока отбора сигналов от цели в стробе сопровождения 4.
Отраженный от цели сигнал принимается посредством антенны 1, через антенный переключатель 2 поступает в приемник 3, где усиливается, фильтруется от помех и поступает на первый вход блока отбора сигналов от цели в стробе сопровождения 4 - на вход блока сравнения с порогом обнаружения 11. При превышении порога обнаружения сигнал об обнаружении с выхода блока сравнения с порогом обнаружения 11 поступает в запоминающее устройство координат и сигналов в элементах строба сопровождения 12, где запоминается в ячейке памяти, соответствующей координатам углового направления строба сопровождения.
Процесс осмотра строба сопровождения продолжается до тех пор, пока не будут осмотрены все угловые направления строба сопровождения. По окончании осмотра строба сопровождения из запоминающего устройства координат и сигналов в элементах строба сопровождения 12 выбирается группа элементов строба, в которых произошло обнаружение сигнала, наиболее близкая к центру строба (пространственный пакет или пачка сигналов, Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., 1974, с.43-49). Операция пакетирования производится в блоке проверки условия отбора сигналов от цели 13. Координаты центра пакета принимаются за координаты цели и с первого выхода блока отбора сигналов от цели в стробе сопровождения 4 передаются в блок сглаживания параметров траектории 6.
Если в стробе сопровождения сигнала от цели не обнаружено, то со второго выхода блока отбора сигналов от цели в стробе сопровождения 4 в блок проверки критерия сброса траектории с сопровождения 5 выдается сигнал и проверяется критерий сброса траектории с сопровождения. Критерий сброса заключается в заданном количестве (обычно два-три) пропусков цели за несколько обзоров подряд. При выполнении критерия сброса сопровождение траектории прекращается. Если в стробе сопровождения сигнала от цели не обнаружено, а критерий сброса не выполнен, то в качестве координат цели берутся координаты центра строба сопровождения, которые передаются в блок сглаживания параметров траектории 6.
В блоке сглаживания параметров траектории 6 производится вычисление наиболее вероятных значений параметров траектории цели с учетом предполагаемого закона движения цели и ошибок измерения координат. Сглаженные параметры траектории с выхода блока сглаживания параметров траектории 6 выдаются потребителю.
Сглаженные значения параметров траектории цели поступают также в блок экстраполяции параметров траектории цели 7, где вычисляются экстраполированные параметры траектории цели на момент следующего обращения к цели.
Исходя из значений экстраполированных координат цели, в блоке вычисления границ строба сопровождения 8 вычисляются и запоминаются координаты направлений строба сопровождения, подлежащих осмотру. При этом используются заранее известные точностные характеристики измеренных и экстраполированных координат, а также информация о пропуске сигналов от цели в стробе сопровождения (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., 1974, с.237-241). Координаты направлений излучения зондирующих сигналов строба сопровождения с выхода блока вычисления границ строба сопровождения 8 по команде синхронизатора 10 подаются на второй вход блока отбора сигналов от цели в стробе сопровождения 4, где записываются в запоминающее устройство координат и сигналов в элементах строба сопровождения 12 и хранятся там до следующего обращения к цели.
Далее цикл сопровождения траектории повторяется.
В процессе сопровождения траектории цели в строб сопровождения могут попадать и цели, не находящиеся в данный момент на сопровождении, а также неподвижные и движущиеся пассивные помехи (подстилающая поверхность, местные предметы, облака, фрагменты уничтоженных целей и т.п.). Если по всем объектам, обнаруженным в стробе, формировать траектории, то в условиях пассивных помех количество ложных траекторий может оказаться столь большим, что произойдет перегрузка системы обработки радиолокационной информации РЛС. Для уменьшения количества ложных траекторий в стробе сопровождения проводят операцию отбора сигналов, отраженных от сопровождаемой цели. Обычно эта операция проводится по критерию минимума расстояния сигнала от центра строба (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., 1974, с.324). Однако эффективность указанного способа в условиях помех часто бывает недостаточной, и количество формируемых ложных траекторий оказывается неприемлемо большим.
Заявляемое изобретение направлено на устранение указанного недостатка.
Решаемой задачей (техническим результатом) является уменьшение количества ложных траекторий за счет увеличения достоверности отбора сигналов от сопровождаемой цели в стробе сопровождения.
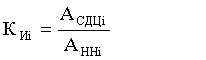
Указанный технический результат достигается тем, что в способе сопровождения траектории цели, включающем излучение в каждом направлении строба сопровождения зондирующих сигналов, прием сигналов от отражающих объектов, отбор в стробе сопровождения сигналов от сопровождаемой цели, вычисление сглаженных параметров траектории сопровождаемой цели, согласно изобретению, отбор сигналов от сопровождаемой цели в стробе сопровождения осуществляют с использованием системы селекции движущихся целей (СДЦ) и некогерентного накопителя (НКН), при этом в направлениях строба сопровождения излучают зондирующие сигналы, состоящие не менее чем из трех импульсов, принятые от отражающих объектов импульсы обрабатывают в системе СДЦ и в НКН, амплитуду сигнала на выходе НКН АHHi в каждом (i-м) элементе строба сопровождения сравнивают с порогом обнаружения, установленным исходя из заданного уровня ложных тревог, в элементах строба, в которых указанная амплитуда превышает указанный порог, определяют отношение:

где АСДЦi - измеренная амплитуда сигнала на выходе системы СДЦ в i-м элементе строба сопровождения, превышающая уровень шума, i=1,…n, где n - количество элементов строба сопровождения,
полученное отношение КИi сравнивают с пороговым значением КП, установленным исходя из сглаженной радиальной скорости сопровождаемой цели, ошибок ее измерения, амплитудно-скоростной характеристики применяемой системы СДЦ, при этом сигналы, для которых выполняется условие

считают сигналами, отраженными от сопровождаемой цели, остальные сигналы относят к случайно попавшим в строб сопровождения целям и пассивным помехам.
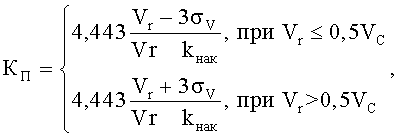
Указанный технический результат достигается также тем, что в качестве системы СДЦ применяют трехимпульсную разностно-временную систему СДЦ, для которой пороговое значение КП вычисляют в соответствии с формулой:

где Vr - сглаженная радиальная скорость сопровождаемой цели;
σv - среднеквадратическая ошибка определения сглаженной радиальной скорости цели;
VC - значение первой ненулевой «слепой» скорости системы СДЦ;
kнак - коэффициент накопления НКН, рассчитываемый как отношение амплитуды сигнала на его выходе к амплитуде одного принятого импульса.
Указанный технический результат достигается также тем, что в РЛС, содержащей антенну, антенный переключатель, приемник, блок отбора сигналов от цели в стробе сопровождения, блок проверки критерия сброса траектории с сопровождения, блок сглаживания параметров траектории, блок экстраполяции параметров траектории цели, блок вычисления границ строба сопровождения, передатчик, синхронизатор, при этом сигнальный вход-выход антенны соединен со входом-выходом антенного переключателя, выход которого соединен со входом приемника, блок отбора сигналов от цели в стробе сопровождения последовательно соединен с блоком сглаживания параметров траектории цели, блоком экстраполяции параметров траектории цели и блоком вычисления границ строба, выход передатчика соединен со входом антенного переключателя, второй выход блока отбора сигналов от цели в стробе сопровождения соединен со входом блока проверки критерия сброса траектории с сопровождения, выход которого соединен со вторым входом блока сглаживания параметров траектории цели, выход блока сглаживания параметров траектории цели является выходом РЛС, выход блока вычисления границ строба сопровождения соединен с информационным входом антенны и вторым входом блока отбора сигналов от цели в стробе сопровождения, первый, второй, третий и четвертый выходы синхронизатора соединены с синхровходами приемника, блока отбора сигналов от цели в стробе сопровождения, блока вычисления границ строба и передатчика соответственно, блок отбора сигналов от цели в стробе сопровождения, включающий блок сравнения с порогом обнаружения и блок проверки условия отбора сигналов от цели, согласно изобретению, в блок отбора сигналов от цели в стробе сопровождения введены система СДЦ, НКН, второй блок сравнения с порогом обнаружения, запоминающее устройство координат элементов строба сопровождения, запоминающее устройство сглаженной радиальной скорости цели, при этом соединенные между собой входы системы СДЦ и НКН образуют первый вход блока отбора сигналов от цели в стробе сопровождения, входы запоминающего устройства координат элементов строба сопровождения и запоминающего устройства сглаженной радиальной скорости цели являются соответственно вторым и третьим входами этого блока, выход системы СДЦ соединен со входом блока сравнения с порогом обнаружения, выход НКН соединен со входом второго блока сравнения с порогом обнаружения, выходы блока сравнения с порогом обнаружения, системы СДЦ, второго блока сравнения с порогом обнаружения, запоминающего устройства координат элементов строба сопровождения, запоминающего устройства сглаженной радиальной скорости цели соединены соответственно с первым, вторым, третьим, четвертым и пятым входами блока проверки условия отбора сигналов от цели, первый и второй выходы блока проверки условия отбора сигналов от цели являются соответственно первым и вторым выходами блока отбора сигналов от цели в стробе сопровождения, а выход блока сглаживания параметров траектории цели соединен с третьим входом блока отбора сигналов от цели в стробе сопровождения.
Суть заявляемых технических решений заключается в следующем.
Как уже отмечалось, в наиболее близком способе для отбора сигналов от цели в стробе сопровождения используется пространственное положение сигналов в стробе. При этом за сигналы от цели принимаются сигналы, находящиеся на минимальных среди всех сигналов в стробе расстояниях от центра строба. Однако в условиях пассивных помех такой признак, как правило, не эффективен, поскольку из-за наличия в стробе сопровождения сигналов, не относящихся к сопровождаемой цели, положения сигналов от цели в стробе не может быть статистически достоверно спрогнозировано.
В заявляемом способе в качестве признака, по которому производится отбор сигналов от цели в стробе сопровождения, используется радиальная скорость отражающего объекта. При этом за радиальную скорость цели берут сглаженную радиальную скорость сопровождаемой цели Vr, полученную при предыдущих обращениях к ней.
Поскольку в стробе сопровождения присутствуют сигналы от нескольких отражающих объектов, то для отбора сигналов от цели необходимо определить радиальные скорости каждого из объектов. Решение этой задачи в заявляемом способе осуществляется с использованием нормированной к одному импульсу СДЦ амплитудно-скоростной характеристики (АСХ) системы СДЦ. Вид нормированной АСХ СДЦ зависит только от известных параметров РЛС (типа зондирующего сигнала, вида СДЦ, периодов между импульсами СДЦ) и не зависит от таких неизвестных параметров отражающего объекта и РЛС, как эффективная поверхность рассеяния отражающего объекта и уровень коэффициента усиления антенны в направлении на объект. Указанные особенности нормированной АСХ СДЦ позволяют использовать ее для определения радиальной скорости отражающего объекта.
С учетом того, что нормированная АСХ СДЦ представляет собой зависимость отношения амплитуды сигнала на выходе системы СДЦ к амплитуде одного импульса СДЦ от радиальной скорости объекта, то, в принципе, для отбора цели по величине радиальной скорости отражающего объекта достаточно для каждого сигнала в стробе сопровождения измерять отношение амплитуды сигнала на выходе СДЦ к амплитуде одного импульса на входе СДЦ, сопоставлять величину полученного отношения с уровнем нормированной АСХ СДЦ и определять из нее радиальную скорость объекта. Но при этом возникают две проблемы, одна из них связана с недостаточностью мощности одного импульса СДЦ, вторая - с изрезанностью АСХ.
В заявляемом изобретении для решения первой проблемы в измеряемом отношении KИi вместо одного импульса СДЦ используется некогерентная сумма отраженных от объекта принимаемых в направлении луча импульсов, получаемая с помощью НКН. В этом случае используется вся энергия излучаемых в направлении импульсов. Характеристикой НКН является коэффициент накопления kнак, равный отношению амплитуды сигнала на его выходе к амплитуде одного принятого импульса. Поскольку некогерентная сумма импульсов не зависит от скорости отражающего объекта, то увеличение мощности принимаемого сигнала может быть учтено в величине его порогового значения при принятии решения.
Вторая проблема - изрезанность АСХ СДЦ - не позволяет по измеренному отношению сигнала на выходе СДЦ к некогерентной сумме принимаемых в направлении луча импульсов однозначно определить радиальную скорость отражающего объекта. Рассмотрим этот вопрос более подробно.
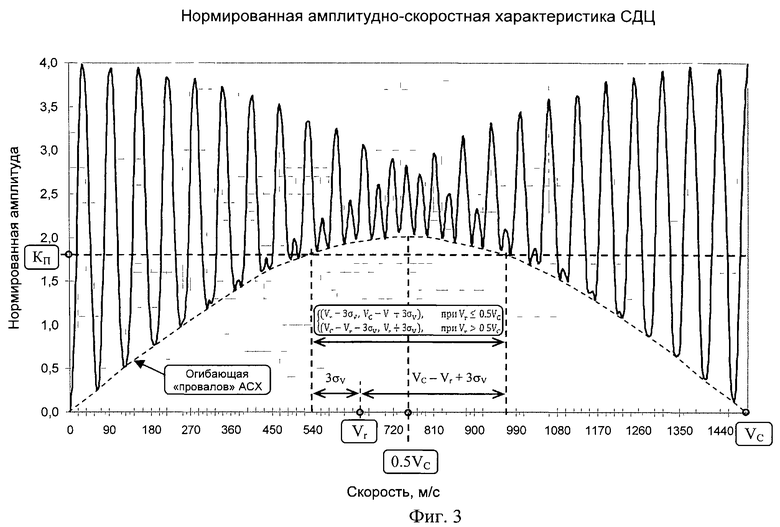
Известно, что АСХ системы СДЦ является периодической функцией (Теоретические основы радиолокации. Под ред. Ширмана Я.Д., 1970, с.479-481). На фиг.3 в качестве примера приведена нормированная к одному импульсу СДЦ АСХ трехимпульсной разностно-временной СДЦ в интервале скоростей от нулевой до первой ненулевой «слепой» скорости. Обычно система СДЦ выбирается такой, чтобы максимальная радиальная скорость цели из заданного для конкретной РЛС диапазона скоростей была меньше первой «ненулевой» слепой скорости. Кроме «слепых» скоростей, существуют локальные минимумы («провалы») и локальные максимумы («пики») АСХ. Нулевой «провал» АСХ соответствует радиальной скорости, равной нулю. Положение «слепых» скоростей, «провалов» и «пиков» АСХ однозначно связано с типом СДЦ, количеством и параметрами излучаемых импульсов, периодами их следования.
В заявляемом изобретении решение о принадлежности сигнала в i-м элементе строба сопровождения сигналам от цели принимается путем сравнения измеренного отношения KИi с пороговым значением КП, полученным исходя из огибающей «провалов» АСХ СДЦ в виде выражения (3). Огибающая «провалов» АСХ СДЦ представляет собой кривую, проведенную через «провалы» АСХ. Пороговое значение КП означает, таким образом, наименьшую величину отношения (2), соответствующего радиальной скорости объекта. Входящая в (3) сглаженная радиальная скорость сопровождаемой цели Vr определяется на предыдущих этапах сопровождения траектории цели (с известными ошибками σV).
На фиг.3 приведен пример определения порогового значения КП из огибающей «провалов» АСХ СДЦ.
Из расчетов и фиг.3 следует, что измеренное отношение КИi превышает уровень порогового значения КП (то есть выполняется условие (2)) только в случае, когда радиальная скорость объекта находится в диапазоне:

Радиальная скорость сопровождаемой цели с высокой вероятностью находится в указанном диапазоне скоростей, поэтому сигналы, удовлетворяющие условию (2), относят к цели. По таким сигналам продолжают формирование траектории цели. Отражающие объекты строба сопровождения, для сигналов от которых отношение КИi не превышает порогового значения КП (то есть условие (2) не выполняется), имеют радиальные скорости вне этого диапазона, и поэтому их относят к случайно попавшим в строб сопровождения целям и пассивным помехам. По таким сигналам траектории не формируют.
Таким образом, применение признака радиальной скорости отражающего объекта позволяет в стробе сопровождения производить отбор сигналов, отраженных от объектов, движущихся с радиальной скоростью сопровождаемой цели (с учетом оговоренных ошибок). Этот признак отбора является более достоверным признаком, чем расположение сигнала в стробе, поскольку он учитывает индивидуальную характеристику сопровождаемой цели - радиальную скорость. При этом обеспечивается значительное уменьшение количества ложных траекторий, то есть достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - функциональная схема РЛС, реализующей наиболее близкий способ.
Фиг.2 - функциональная схема блока отбора сигналов от цели в стробе сопровождения в РЛС, реализующей наиболее близкий способ.
Фиг.3 - пример амплитудно-скоростной характеристики трехимпульсной разностно-временной системы СДЦ, нормированной к амплитуде одного импульса СДЦ, и пример определения порогового значения КП. Рамками выделены измеряемые и известные величины.
Фиг.4 - функциональная схема РЛС, реализующей заявляемый способ.
Фиг.5 - функциональная схема блока отбора сигналов от цели в стробе сопровождения в РЛС, реализующей заявляемый способ.
РЛС, реализующая заявляемый способ, содержит (фиг.4) антенну 1, антенный переключатель 2, приемник 3, блок отбора сигналов от цели в стробе сопровождения 4, блок проверки критерия сброса траектории с сопровождения 5, блок сглаживания параметров траектории цели 6, блок экстраполяции параметров траектории цели 7, блок вычисления границ строба сопровождения 8, передатчик 9, синхронизатор 10. При этом сигнальный вход-выход антенны 1 соединен со входом-выходом антенного переключателя 2, выход которого соединен с последовательно соединенными приемником 3, блоком отбора сигналов от цели в стробе сопровождения 4, блоком сглаживания параметров траектории цели 6, блоком экстраполяции параметров траектории цели 7 и блоком вычисления границ строба сопровождения 8, выход передатчика 9 соединен со входом антенного переключателя 2, второй выход блока отбора сигналов от цели в стробе сопровождения 4 соединен со входом блока проверки критерия сброса траектории с сопровождения 5, выход которого соединен со вторым входом блока сглаживания параметров траектории цели 6, выход блока сглаживания параметров траектории цели 6 соединен с третьим входом блока отбора сигналов от цели в стробе сопровождения 4 и является выходом РЛС, выход блока вычисления границ строба 8 соединен с управляющим входом антенны 1 и вторым входом блока отбора сигналов от цели в стробе сопровождения 4, первый, второй, третий и четвертый выходы синхронизатора 10 соединены с синхровходами приемника 3, блока отбора сигналов от цели в стробе сопровождения 4, блоком вычисления границ строба сопровождения 8 и передатчика 9 соответственно.
Блок отбора сигналов от цели в стробе сопровождения 4 содержит (фиг.5) блок сравнения с порогом обнаружения 11, блок проверки условия отбора сигналов от цели 13, систему СДЦ 14, НКН 15, второй блок сравнения с порогом обнаружения 16, запоминающее устройство координат элементов строба сопровождения 17, запоминающее устройство сглаженной радиальной скорости цели 18. При этом соединенные между собой вход системы СДЦ 14 и вход НКН 15 образуют первый вход блока отбора сигналов от цели в стробе сопровождения 5, вход запоминающего устройства координат элементов строба сопровождения 17 и вход запоминающего устройства сглаженной радиальной скорости цели 18 являются соответственно вторым и третьим входами этого блока, выход системы СДЦ 14 соединен со входом блока сравнения с порогом обнаружения 11, выход НКН 15 соединен со входом второго блока сравнения с порогом обнаружения 16, выход блока сравнения с порогом обнаружения 11, выход системы СДЦ 14, выход второго блока сравнения с порогом обнаружения 16, выход запоминающего устройства координат элементов строба сопровождения 17 и выход запоминающего устройства сглаженной радиальной скорости цели 18 соединены соответственно с первым, вторым, третьим, четвертым и пятым входами блока проверки условия отбора сигналов от цели 13, первый и второй выходы блока проверки условия отбора сигналов от цели 13 являются соответственно первым и вторым выходами блока отбора сигналов от цели в стробе сопровождения 4.
Радиолокационная станция, реализующая заявляемый способ, может быть выполнена с использованием следующих функциональных элементов.
Антенна 1 - фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам, неподвижная или с круговым механическим вращением (Справочник по радиолокации. Под ред. М.Сколника, т.2. - М., 1977, с.132-138). Сигнальный вход/выход антенны предназначен для передаваемых/принимаемых зондирующих сигналов, управляющий вход антенны предназначен для сигналов, управляющих положением луча антенны.
Антенный переключатель 2 - выполнен на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с.146-147).
Приемник 3 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с.343-344).
Блок проверки критерия сброса траектории с сопровождения 5 - вычислитель, реализующий операцию подсчета количества пропусков сигналов от цели в стробе сопровождения за несколько обзоров подряд и сравнения этого количества с заранее заданным. При превышении заданного количества пропусков сопровождение траектории прекращается. Блок может быть выполнен на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина. - М., 1984).
Блок сглаживания параметров траектории цели 6 - вычислитель, реализующий операцию сглаживания (фильтрации) параметров траектории (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., 1974, глава 9). Блок может быть выполнен на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина. - М., 1984).
Блок экстраполяции параметров траектории цели 7 - вычислитель, реализующий операцию экстраполяции параметров траектории цели (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., 1974, с.229-236). Блок может быть выполнен на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т. В. Тарабрина. - М., 1984).
Блок вычисления границ строба сопровождения 8 - вычислитель, реализующий операцию вычисления размеров и границ стробов сопровождения (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., 1974, с.237-241). Блок может быть выполнен на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина. - М., 1984).
Передатчик 9 - импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с.278).
Синхронизатор 10 - выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова. - М., 1970, с.602-603).
Блок сравнения с порогом обнаружения 11 и второй блок сравнения с порогом обнаружения 16 - выполнены на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина. 1984). В блоках производится сравнение амплитуды входного сигнала с порогом обнаружения. С выхода блока выдается единичный сигнал, если входной сигнал превышает заданный пороговый уровень, выдается нулевой сигнал, если порог обнаружения не превышен.
Блок проверки условия отбора сигналов от цели 13 - вычислитель, реализующий вычисление отношения (1), сравнение его с пороговым значением КП, заранее вычисленным в соответствии с формулой (3). Если условие (2) выполняется, то принятый сигнал считается отраженным от сопровождаемой цели. В противном случае сигнал относят к случайно попавшим в строб сопровождения целям и пассивным помехам, траектории по ним не формируют. Блок может быть выполнен на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина. - М., 1984).
Система СДЦ 14 - трехимпульсная разностно-временная система СДЦ.
Обработка сигналов в трехимпульсной разностно-временной системе СДЦ осуществляется в соответствии с формулой:

где u - сигнал на выходе системы СДЦ,
u1, u2, u3 - амплитуды 1-го, 2-го и 3-го принятых импульсов соответственно.
Трехимпульсная разностно-временная система СДЦ может быть реализована на двух сдвигающих линиях задержки, компенсирующей линии задержки и сумматоре (Справочник по радиолокации. Ред. М.Сколник. 1979, т.3, с.319-320).
НКН 15 - некогерентный накопитель, осуществляющий суммирование амплитуд (по модулю) принятых импульсов (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана, 1970, с.153-159, рис.3.48).
Запоминающее устройство координат элементов строба сопровождения 17 и запоминающее устройство радиальной скорости цели 18 - выполнены на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина. - М.: «Радио и связь», 1984).
Радиолокационная станция, реализующая заявляемый способ, работает следующим образом.
Передатчиком 9 по командами синхронизатора 10 формируется зондирующий сигнал в виде импульсов (не менее трех), который с помощью антенного переключателя 2 направляется на сигнальный вход антенны 1 и излучается в очередное угловое направление строба сопровождения. Координаты угловых направлений строба сопровождения, которые должны быть осмотрены на текущем обзоре, определены в блоке вычисления границ строба сопровождения 8 при предыдущем обращении к цели. Указанные координаты, а также сглаженная радиальная скорость сопровождаемой цели, вычисленная в блоке сглаживания параметров траектории цели 6 при предыдущем обзоре, записаны соответственно в запоминающем устройстве координат элементов строба сопровождения 17 и в запоминающем устройстве сглаженной радиальной скорости цели 18 блока отбора сигналов от цели в стробе сопровождения 4.
Отраженные от цели импульсы принимаются посредством антенны 1, проходят через антенный переключатель 2 и поступают в приемник 3, где усиливаются, фильтруются от помех и через первый вход блока отбора сигналов от цели в стробе сопровождения 4 поступают на вход системы СДЦ 14 и вход НКН 15. С выхода системы СДЦ 14 сигнал, амплитуда которого зависит от скорости отражающего объекта, поступает в блок сравнения с порогом обнаружения 11. При превышении порога обнаружения с выхода этого блока на первый вход блока проверки условия отбора сигналов от цели 13 выдается сигнал об обнаружении. Если порог обнаружения не превышен, с выхода блока 11 выдается сигнал об отсутствии обнаружения. На второй вход блока проверки условия отбора сигналов от цели 13 поступает сигнал с выхода системы СДЦ 14.
С выхода НКН 15 сигнал, равный некогерентной сумме принятых импульсов, поступает во второй блок сравнения с порогом обнаружения 16. При превышении порога обнаружения с выхода этого блока на третий вход блока проверки условия отбора сигналов от цели 13 выдается сигнал об обнаружении. Если порог обнаружения не превышен, с выхода блока 16 выдается сигнал об отсутствии обнаружения.
В блоке проверки условия отбора сигналов от цели 13 на основании сигналов, поступивших на входы 1, 2 и 3, для каждого элемента строба сопровождения, координаты которого поступают на вход 4, определяют отношение (1), которое сравнивают с пороговым значением КП, заранее вычисленным в соответствии с формулой (3). Сигнал с выхода системы СДЦ 14, поступающий на вход 2, может использоваться в выражении (1) только в случае, если он выше уровня шума на выходе СДЦ, что проверяется в блоке сравнения с порогом обнаружения 11. Сигнал об этом поступает на вход 1.
Если условие (2) выполняется, то это означает, что радиальная скорость отражающего объекта с допустимой погрешностью равна радиальной скорости сопровождаемой цели, и принятый сигнал считается отраженным от сопровождаемой цели. В противном случае сигнал относят к случайно попавшим в строб сопровождения целям и пассивным помехам, траектории по ним не формируют.
При вычислении величины КП в блоке проверки условия отбора сигналов от цели 13 используется значение сглаженной радиальной скорости, поступающее с выхода запоминающего устройства сглаженной радиальной скорости цели 18 на вход 5.
Обновление порогового значения КП проводят при смене параметров зондирующих сигналов или периодов следования зондирующих импульсов.
Описанный процесс осмотра строба сопровождения продолжается до тех пор, пока не будут осмотрены все угловые направления строба сопровождения. По окончании осмотра строба сопровождения из элементов строба, в которых произошло обнаружение сигнала, в блоке проверки условия отбора сигналов от цели 13 формируется пространственный пакет сигналов. Критерием принадлежности элементов строба пространственному пакету сигналов является их близость в пространстве по всем трем координатам: углу места, азимуту, дальности. Координаты центра сформированного пространственного пакета принимаются за координаты цели и передаются в блок сглаживания параметров траектории цели 6. Применение операции пакетирования обнаруженных сигналов позволяет значительно увеличить точность измерения координат цели.
Если в стробе сопровождения сигналов от цели не обнаружено, то в блок проверки критерия сброса траектории с сопровождения 5 выдается сигнал и проверяется критерий сброса траектории с сопровождения. Критерий сброса заключается в заданном количестве (обычно два-три) пропусков цели подряд. При выполнении критерия сброса сопровождение траектории прекращается. Если в стробе сопровождения сигналов от цели не обнаружено, а критерий сброса не выполнен, то в качестве координат цели берутся координаты центра строба сопровождения, которые передаются в блок сглаживания параметров траектории цели 6.
В блоке сглаживания параметров траектории цели 6 производится вычисление наиболее вероятных значений параметров траектории цели (координат цели, скорости цели) с учетом предполагаемого закона движения цели и ошибок измерения координат. Сглаженные параметры траектории с выхода блока сглаживания параметров траектории цели 6 выдаются потребителю. В этом блоке определяется сглаженная радиальная скорость сопровождаемой цели, которая через третий вход блока отбора сигналов от цели в стробе сопровождения 4 передается на вход запоминающего устройства сглаженной радиальной скорости цели 18 и хранится там до следующего обращения к цели.
Сглаженные значения параметров траектории цели далее поступают в блок экстраполяции параметров траектории цели 7, где вычисляются экстраполированные параметры траектории цели на момент следующего обращения к цели.
Исходя из значений экстраполированных параметров траектории цели, в блоке вычисления границ строба сопровождения 8 вычисляются и запоминаются координаты направлений строба сопровождения, подлежащих осмотру на следующем обзоре. При этом используются заранее известные точностные характеристики измеренных и экстраполированных координат, а также информация о пропуске сигналов от цели в стробе сопровождения на предыдущих обзорах. Координаты направлений излучения зондирующих сигналов с выхода блока вычисления границ строба сопровождения 8 по команде синхронизатора 10 подаются на второй вход блока отбора сигналов от цели в стробе сопровождения 4, где записываются в запоминающее устройство координат элементов строба сопровождения 17 и хранятся там до следующего обращения к цели.
Далее цикл сопровождения траектории повторяется.
Таким образом, достигается заявляемый технический результат.


Использование: в обзорных радиолокационных станциях при сопровождении траекторий целей в стробах. Сущность: отбор сигналов от сопровождаемой цели в стробе сопровождения осуществляют с использованием признака радиальной скорости. При этом в направлениях строба сопровождения излучают зондирующие сигналы, состоящие не менее чем из трех импульсов. Принятые в каждом (i-м) элементе строба импульсы обрабатывают в системе селекции движущихся целей (СДЦ) (выходной сигнал АСДЦi) и некогерентном накопителе (выходной сигнал АHHi), определяют отношение выходных сигналов:
которое сравнивают с пороговым значением КП, установленным исходя из сглаженной радиальной скорости сопровождаемой цели Vr, ошибок ее измерения σv, амплитудно-скоростной характеристики применяемой системы СДЦ. Сигналы, для которых выполняется условие KИi>KП, считают сигналами, отраженными от сопровождаемой цели, остальные сигналы считают сигналами, не относящимися к сопровождаемой цели, и пассивными помехами. Технический результат: уменьшение количества ложных траекторий за счет увеличения достоверности отбора сигналов от сопровождаемой цели в стробе сопровождения. 2 н. и 1 з.п. ф-лы, 5 ил.
1. Способ сопровождения траектории цели, включающий излучение в каждом направлении строба сопровождения зондирующих сигналов, прием сигналов от отражающих объектов, отбор в стробе сопровождения сигналов от сопровождаемой цели, вычисление сглаженных параметров траектории сопровождаемой цели, отличающийся тем, что отбор сигналов от сопровождаемой цели в стробе сопровождения осуществляют с использованием системы селекции движущихся целей (СДЦ) и некогерентного накопителя (НКН), при этом в направлениях строба сопровождения излучают зондирующие сигналы, состоящие не менее чем из трех импульсов, принятые от отражающих объектов импульсы обрабатывают в системе СДЦ и в НКН, амплитуду сигнала на выходе НКН AHHi в каждом (i-м) элементе строба сопровождения сравнивают с порогом обнаружения, установленным исходя из заданного уровня ложных тревог, в элементах строба, в которых указанная амплитуда превышает указанный порог, определяют отношение:

где АСДЦi - измеренная амплитуда сигнала на выходе системы СДЦ в i-м элементе строба сопровождения, превышающая уровень шума, i=1,… n, где n - количество элементов строба сопровождения, полученное отношение КИi сравнивают с пороговым значением КП, установленным исходя из сглаженной радиальной скорости сопровождаемой цели, ошибок ее измерения, амплитудно-скоростной характеристики применяемой системы СДЦ, при этом сигналы, для которых выполняется условие КИi>КП считают сигналами, отраженными от сопровождаемой цели, остальные сигналы относят к случайно попавшим в строб сопровождения целям и пассивным помехам.
2. Способ по п.1, отличающийся тем, что в качестве системы СДЦ применяют трехимпульсную разностно-временную систему СДЦ, для которой пороговое значение КП вычисляют в соответствии с формулой:
где Vr - сглаженная радиальная скорость сопровождаемой цели;
σv - среднеквадратическая ошибка определения сглаженной радиальной
скорости цели;
Vc - значение первой ненулевой «слепой» скорости системы СДЦ;
kнак - коэффициент накопления НКН, рассчитываемый как отношение
амплитуды сигнала на его выходе к амплитуде одного принятого
импульса.
3. Радиолокационная станция (PЛC), содержащая антенну, антенный переключатель, приемник, блок отбора сигналов от цели в стробе сопровождения, блок проверки критерия сброса траектории с сопровождения, блок сглаживания параметров траектории, блок экстраполяции параметров траектории цели, блок вычисления границ строба сопровождения, передатчик, синхронизатор, при этом сигнальный вход-выход антенны соединен со входом-выходом антенного переключателя, выход которого соединен со входом приемника, блок отбора сигналов от цели в стробе сопровождения последовательно соединен с блоком сглаживания параметров траектории цели, блоком экстраполяции параметров траектории цели и блоком вычисления границ строба, выход передатчика соединен со входом антенного переключателя, второй выход блока отбора сигналов от цели в стробе сопровождения соединен со входом блока проверки критерия сброса траектории с сопровождения, выход которого соединен со вторым входом блока сглаживания параметров траектории цели, выход блока сглаживания параметров траектории цели является выходом РЛС, выход блока вычисления границ строба сопровождения соединен с информационным входом антенны и вторым входом блока отбора сигналов от цели в стробе сопровождения, первый, второй, третий и четвертый выходы синхронизатора соединены с синхровходами приемника, блока отбора сигналов от цели в стробе сопровождения, блока вычисления границ строба и передатчика соответственно, блок отбора сигналов от цели в стробе сопровождения, включающий блок сравнения с порогом обнаружения и блок проверки условия отбора сигналов от цели, отличающаяся тем, что в блок отбора сигналов от цели в стробе сопровождения введены система селекции движущихся целей (СДЦ), некогерентный накопитель (НКН), второй блок сравнения с порогом обнаружения, запоминающее устройство координат элементов строба сопровождения, запоминающее устройство сглаженной радиальной скорости цели, при этом соединенные между собой входы системы СДЦ и НКН образуют первый вход блока отбора сигналов от цели в стробе сопровождения, входы запоминающего устройства координат элементов строба сопровождения и запоминающего устройства сглаженной радиальной скорости цели являются соответственно вторым и третьим входами этого блока, выход системы СДЦ соединен со входом блока сравнения с порогом обнаружения, выход НКН соединен со входом второго блока сравнения с порогом обнаружения, выходы блока сравнения с порогом обнаружения, системы СДЦ, второго блока сравнения с порогом обнаружения, запоминающего устройства координат элементов строба сопровождения, запоминающего устройства сглаженной радиальной скорости цели соединены соответственно с первым, вторым, третьим, четвертым и пятым входами блока проверки условия отбора сигналов от цели, первый и второй выходы блока проверки условия отбора сигналов от цели являются соответственно первым и вторым выходами блока отбора сигналов от цели в стробе сопровождения, а выход блока сглаживания параметров траектории цели соединен с третьим входом блока отбора сигналов от цели в стробе сопровождения.
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ | 2008 |
|
RU2366971C1 |
| КАМЕРА СГОРАНИЯ ДЛЯ ДИЗЕЛЯ | 1967 |
|
SU214942A1 |
| RU 96106629 А, 20.01.1998 | |||
| JP 57161574 А, 05.10.1982 | |||
| DE 3943459 А1, 24.06.1993. | |||

