Изобретение относится к средствам для обучения операторов и предназначено для использования при обучении и тренировках операторов различных систем и комплексов, связанных с пилотированием, навигацией и боевым применением летательного аппарата; может применяться на авиационных тренажерах или учебных самолетах/ воздушных суднах (далее - ВС) для профессиональной подготовки летчиков или штурманов.
Известен учебно-тренировочный комплекс авиационный для летного состава из патента РФ №2250511 с датой приоритета 10.03.2004, в состав которого входит вычислительная система, обеспечивающая моделирование функционирования систем и оборудования самолета. Вычислительная система с соответствующими математическими моделями обеспечивает повторение алгоритмов и логики работы систем, а также моделирует характерные погрешности их работы с учетом имитируемых режимов работы, условий полета и внешних факторов.
Недостатком способа имитации погрешностей, применяемого в известном учебно-тренировочном комплексе авиационном для летного состава являются ограниченные функциональные возможности, поскольку используется ограниченный состав моделируемых систем и режимов их применения. Также моделирование систем с имитацией погрешностей обеспечивается только на наземном тренажере, но не обеспечивается на борту учебно-тренировочного самолета.
Известен способ моделирования погрешностей измерения бортовых навигационных устройств (Д.В. Козис, О.О. Жаринов, В.Д. Суслов, Научно-технический вестник Санкт-Петербургского государственного университета информационных технологий, механики и оптики, 2010, № 4(68), с.18-20, УДК. 621.396.988.6: 629.19). Способ моделирования погрешностей измерения бортовых навигационных устройств заключается в формировании на выходе модели сигнала, состоящего из суммы:
- истинного (расчетного) значения параметра,
- квазипостоянной составляющей погрешности,
- низкочастотной составляющей погрешности,
- высокочастотной составляющей погрешности.
При этом для имитации погрешности используется нормальный белый шум, для «окрашивания» которого применяются рекурсивные фильтры (в каналах низкочастотной и высокочастотной составляющей погрешности), а в качестве квазипостоянной составляющей погрешности принимается константа, выбранная в начале сеанса моделирования из массива случайных чисел.
К недостаткам указанного метода моделирования погрешностей относятся ограниченные возможности метода, т.к. в результате моделирования по указанному методу точно воспроизводится характер случайной погрешности, однако характер систематической погрешности сильно упрощается в связи с тем, что проводится аппроксимация квазипостоянной составляющей погрешности константой и аппроксимация низкочастотной составляющей погрешности ограниченным набором специальных функций (экспоненциально-косинусной или экспоненциальной).
Технической проблемой, на решение которой направлено заявляемое изобретение, является расширение функциональных возможностей и обеспечение повышения профессиональной подготовки операторов путем применения способа моделирования погрешностей измерения оборудования (в т.ч. бортового оборудования самолетов, на авиационных тренажерах) для обеспечения правдоподобного отображения имитируемых параметров.
Техническим результатом изобретения является повышение эффективности и качества обучения за счет применения моделей функционирования систем, приближенных к реальным системам, что исключает формирование ложных навыков; сокращает время использования более дорогого в обслуживании бортового оборудования (по сравнению с оборудованием тренажеров).
Для достижения указанного технического результата способ имитации систематических и случайных погрешностей оборудования для задач обучения операторов воздушных судов заключается в регистрации измерительной информации и ее обработке, при этом на этапе обработки измерительной информации последовательно устанавливают зависимости и вычисляют коэффициенты, которые определяют погрешность измерения изменяющегося навигационного параметра, а затем восстанавливают (имитируют) погрешность измерения с использованием вычисленных коэффициентов, зависимостей, набора физических параметров и случайных чисел, полученных с генератора случайных чисел (далее - ГСЧ). Причем при обработке измерительной информации для определения параметров, влияющих на характер погрешности используется корреляционный анализ, а для определения коэффициентов функций, аппроксимирующих составляющие погрешности, используется многопараметрическая оптимизация, например, методом покоординатного спуска.
Регистрация измерительной информации производится в течение временного интервала, обеспечивающего определение измеряемой величины с необходимой точностью.
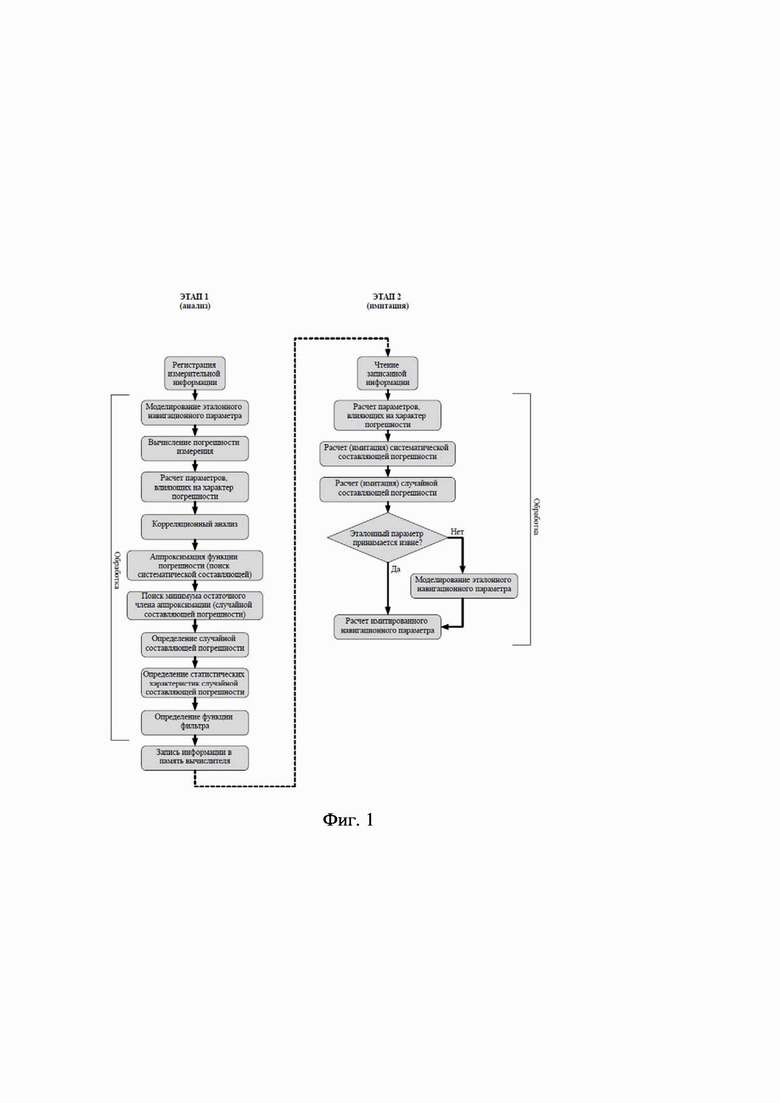
На фиг.1 представлена последовательность действий для имитации систематических и случайных погрешностей оборудования для задач обучения операторов воздушных судов.
Описание осуществления изобретения может быть использовано в качестве примера для лучшего понимания его сущности и изложено со ссылками на фигуру, приложенную к настоящему описанию. При этом приведенные ниже подробности призваны не ограничить сущность изобретения, а сделать ее более ясной.
Рассмотрим реализацию предлагаемого способа в общем виде. Стоит отметить, что с использованием указанного способа могут имитироваться погрешности следующих навигационных параметров:
- крен ВС;
- тангаж ВС;
-магнитный курс ВС;
- азимут от радиотехнической системы ближней навигации (далее - РСБН);
- дальность от РСБН;
- отклонение от курса посадки от РСБН;
- отклонение от глиссады посадки от РСБН;
- азимут от всенаправленного азимутального радиомаяка (далее - VOR);
- дальность от всенаправленного дальномерного радиомаяка (далее - DME);
- отклонение от курса посадки от курсо-глиссадной системы (далее - ILS);
- отклонение от глиссады посадки от ILS;
- курсовой угол радиостанции от автоматического радиокомпаса (далее - АРК);
- радиовысота от радиовысотомера;
- путевая скорость от доплеровского измерителя скорости и сноса (далее - ДИСС);
- угол сноса от ДИСС;
- географическая широта от спутниковой навигационной системы (далее - СНС);
- географическая долгота от СНС;
- путевой угол от СНС;
- вертикальная скорость от СНС;
- географическая широта от радиотехнической системы дальней навигации (далее - РСДН);
- географическая долгота от РСДН;
- географическая широта от инерциальной системы навигации (далее - ИНС);
- географическая долгота от ИНС.
На первом этапе для реализации способа имитации систематических и случайных погрешностей оборудования для задач обучения операторов воздушных судов проводят регистрацию измерительной информации; при этом используется информация, записанная при штатном функционировании оборудования (в лабораторных условиях или во время полета в составе ВС), в т.ч. может использоваться информация, снятая со средств объективного контроля (далее - СОК) самолета. При регистрации информации, записанной во время полета ВС, также проводится регистрация таких параметров ВС как скорость, высота, координаты и т.п. Регистрация информации о работе оборудования производится в течение всего временного интервала от включения до выключения оборудования.
Далее производится обработка измерительной информации, при которой сначала проводится моделирование эталонного навигационного параметра на базе информации из записи штатного функционирования. Эталонный навигационный параметр вычисляется на основе одного или нескольких параметров, погрешность измерения которых меньше погрешности измерения исходного навигационного параметра (например, азимут от радиотехнической системы ближней навигации вычисляется по спутниковым координатам самолета и известным координатам радиомаяка).
С использованием функции эталонного навигационного параметра и измеренного навигационного параметра вычисляется погрешность измерения параметра (функция от времени), как разность измеренного и эталонного параметров:
 ,
,
где:
t - время,
ΔА(t) - погрешность измерения параметра от времени,
Аизм(t) - измеренный навигационный параметр от времени,
Аэт(t) - эталонный навигационный параметр от времени.
На основе записанной информации производится расчет одного или нескольких параметров, которые могут влиять на характер погрешности измерения навигационного параметра (например, отношение сигнал/шум как зависимость от дальности до радиомаяка).
Для определения параметров, влияющих на характер погрешности, проводится корреляционный анализ с одним или несколькими параметрами, которые могут влиять на характер погрешности. По результатам корреляционного анализа отбираются те параметры, влияние которых на характер погрешности наиболее существенно. На базе этих параметров производится аппроксимация функции погрешности. Метод аппроксимации может быть любым подходящим для данного вида функции. Таким образом последовательно устанавливаются зависимости, которые определяют погрешность измерения изменяющегося навигационного параметра.
Производится поиск минимума случайной составляющей погрешности (остаточного члена аппроксимации), для чего используется многопараметрическая оптимизация, например, методом покоординатного спуска или по алгоритму Гаусса - Ньютона, где в качестве параметров выступают коэффициенты функций, аппроксимирующих составляющие погрешности. Таким образом последовательно вычисляются коэффициенты, которые определяют погрешность измерения изменяющегося навигационного параметра.
Определяется случайная составляющая погрешности, как разность между функцией погрешности и всеми аппроксимирующими функциями (остаточный член аппроксимации).
Для случайной составляющей погрешности выполняется расчет ее статистических характеристик: математическое ожидание и моменты случайной величины (в т.ч. дисперсия).
На основе полученных статистических характеристик определяется функция специального фильтра, который используется для «окрашивания» шума с выхода ГСЧ для получения заданных статистических характеристик.
Функция фильтра и все полученные аппроксимирующие функции с их коэффициентами записываются в память вычислителя, который в дальнейшем будет осуществлять моделирование.
На втором этапе для имитации погрешности измерения навигационного параметра специализированный вычислитель по имеющимся в его памяти и на входах данным рассчитывает значения тех параметров, влияние которых на характер погрешности наиболее существенно (перечень таких параметров сформирован на первом этапе).
Для каждого из этих параметров по хранящимся в памяти аппроксимирующим функциям вычисляется соответствующая составляющая погрешности. Для расчета составляющей погрешности может использоваться генератор случайных или псевдослучайных чисел. Необходимость использования случайных чисел определяется ранее полученными аппроксимирующими функциями. Таким образом восстанавливается систематическая составляющая погрешности измерения с использованием вычисленных коэффициентов, зависимостей, набора физических параметров и случайных чисел.
Для имитации случайной составляющей погрешности используются специальные фильтры и генератор случайных или псевдослучайных чисел. Шум, полученный на выходе ГСЧ, «окрашивается» специальными фильтрами для получения заданных статистических характеристик, определенных на первом этапе. В качестве специальных фильтров могут использоваться, например, цифровые рекурсивные фильтры. Таким образом восстанавливается случайная составляющая погрешности измерения с использованием вычисленных коэффициентов, зависимостей и случайных чисел.
Специализированный вычислитель может рассчитывать эталонный навигационный параметр, погрешность измерения которого имитируется, либо получать его извне (с навигационного оборудования или его имитатора).
По результатам сложения эталонного навигационного параметра с систематическими и случайной составляющими имитированной погрешности получается имитированный навигационный параметр, погрешность которого соответствует реальной погрешности измерения данного параметра:

где:
t - время,
 - имитированный навигационный параметр от времени,
- имитированный навигационный параметр от времени,
Аэт(t) - эталонный навигационный параметр от времени,
ΔАсист(t) - систематическая составляющая погрешности измерения от времени, имитированная,
ΔАсл(t) - случайная составляющая погрешности измерения от времени, имитированная.
Далее рассмотрим пример реализации заявляемого способа для параметра - курсовой угол радиостанции (далее - КУР) АРК:
На первом этапе проводится регистрация измерительной информации, при этом используется информация, записанная при штатном функционировании оборудования.
С использованием записи средств объективного контроля ВС рассчитываются эталонные значения КУР в каждый момент времени, по известным координатам радиомаяка и измеренным СНС координатам ВС, по формуле:

где:
Θэт - искомый (эталонный) КУР,
ϕ1 - широта ВС,
ϕ2 - широта маяка,
λ1 - долгота ВС,
λ2 - долгота маяка.
Определяется погрешность измерения КУР по формуле:
 ,
,
где:
ΔΘ - погрешность измерения КУР,
Θизм - измеренный КУР в заданный момент времени,
Θэт - эталонный КУР.
Рассчитываются несколько параметров, влияющих на характер погрешности, в т.ч.:
- установочная ошибка ΔУ (постоянная),
- отношение сигнал/шум на основании известной дальности до радиомаяка S:

где:
SN - расчетное отношением сигнал/шум на входе приемника,
S - дальность до радиомаяка,
 - коэффициент.
- коэффициент.
Для определения параметров, влияющих на характер погрешности производится корреляционный анализ. По результатам корреляционного анализа наибольший вклад в погрешность измерения КУР вносит установочная ошибка (ΔУ) и расстояние до радиомаяка S, которое связано с отношением сигнал/шум на входе приемника (SN).
Известная зависимость погрешности Δ от времени аппроксимируется функцией от данных от параметров:
от времени аппроксимируется функцией от данных от параметров:

Где:
 - аппроксимированная систематическая составляющая погрешности измерения КУР,
- аппроксимированная систематическая составляющая погрешности измерения КУР,
t - время,
k - коэффициент,
R1(t) - случайная функция с выхода ГСЧ,
SN(t) - отношение сигнал/шум от времени,
ΔУ - установочная ошибка.
Таким образом последовательно устанавливаются зависимости, которые определяют погрешность измерения изменяющегося навигационного параметра.
Далее для определения коэффициентов функций, аппроксимирующих составляющие погрешности, используется многопараметрическая оптимизация, в ходе которой подбираются такие значения коэффициентов k, k1 и установочной ошибки ΔУ, для которых разность погрешности измерения КУР и аппроксимированной систематической погрешности будет минимальна:
 →min,
→min,
Где:
t - время,
 - погрешность измерения КУР от времени,
- погрешность измерения КУР от времени,
 - аппроксимированная систематическая составляющая погрешности измерения КУР от времени.
- аппроксимированная систематическая составляющая погрешности измерения КУР от времени.
Для величины случайной погрешности (остаточного члена аппроксимации)  вычисляются основные статистические характеристики: математическое ожидание и моменты.
вычисляются основные статистические характеристики: математическое ожидание и моменты.
По статистическим характеристикам случайной погрешности рассчитывается соответствующая функция «окрашивающего» фильтра T.
Полученная при расчетах информация записывается в память вычислителя.
На втором этапе специализированный вычислитель считывает из памяти ранее записанную информацию.
Специализированный вычислитель рассчитывает отношение сигнал/шум на основании известной дальности до радиомаяка S:
где:
SN - расчетное отношением сигнал/шум на входе приемника,
S - дальность до радиомаяка,
- коэффициент.
Далее вычисляется систематическая составляющая погрешности по известным значениям SN, k и с использованием случайной функции с выхода ГСЧ R1(t):
с использованием случайной функции с выхода ГСЧ R1(t):

где:
- аппроксимированная систематическая составляющая погрешности измерения КУР от времени,
t - время,
k - коэффициент,
R1(t) - случайная функция с выхода ГСЧ,
SN(t) - отношение сигнал/шум от времени,
 - установочная ошибка.
- установочная ошибка.
Далее случайная составляющая погрешности рассчитывается в каждый момент времени на основе случайной функции с выхода ГСЧ R2(t), обработанной специальным «окрашивающим» фильтром, функция которого была ранее определена на основе характеристик случайной составляющей погрешности:
 ,
,
где:
 - случайная составляющая погрешности измерения от времени, имитированная,
- случайная составляющая погрешности измерения от времени, имитированная,
R2(t) - случайная функция с выхода ГСЧ,
T - функция, описывающая фильтр.
Далее вычислитель использует рассчитанный или полученный от сопрягаемого оборудования эталонный КУР (функция от времени)  и прибавляет к нему рассчитанные составляющие погрешности для получения имитируемого КУР, погрешность которого соответствует реальной погрешности измерения КУР:
и прибавляет к нему рассчитанные составляющие погрешности для получения имитируемого КУР, погрешность которого соответствует реальной погрешности измерения КУР:

где:
 - имитированный КУР от времени,
- имитированный КУР от времени,
 - эталонный КУР от времени,
- эталонный КУР от времени,
- аппроксимированная систематическая составляющая погрешности измерения КУР от времени,
- случайная составляющая погрешности измерения от времени, имитированная,
k - коэффициент,
R1(t) - случайная функция с выхода ГСЧ,
SN(t) - отношение сигнал/шум от времени,
ΔУ - установочная ошибка.
R2(t) - случайная функция с выхода ГСЧ,
T - функция, описывающая фильтр,
t - время.
Таким образом восстанавливается (имитируется) погрешность измерения с использованием вычисленных коэффициентов, формул, набора физических параметров и случайных чисел, полученных с генератора случайных чисел.
Повышение эффективности и качества обучения достигается за счет того, что способ имитации систематических и случайных погрешностей оборудования для задач обучения операторов воздушных судов заключается в регистрации измерительной информации и ее обработке, при этом на этапе обработки измерительной информации последовательно устанавливают зависимости и вычисляют коэффициенты, которые определяют погрешность измерения изменяющегося навигационного параметра, а затем восстанавливают (имитируют) погрешность измерения с использованием вычисленных коэффициентов, зависимостей, набора физических параметров и случайных чисел, полученных с генератора случайных чисел. Причем при обработке измерительной информации для определения параметров, влияющих на характер погрешности используется корреляционный анализ, а для определения коэффициентов функций, аппроксимирующих составляющие погрешности, используется многопараметрическая оптимизация.
Изобретение относится к средствам для обучения операторов и предназначено для использования при обучении и тренировках операторов различных систем и комплексов, связанных с пилотированием, навигацией и боевым применением летательного аппарата (ЛА). Способ имитации систематических и случайных погрешностей оборудования для задач обучения операторов воздушных судов заключается в регистрации измерительной информации и ее обработке. При этом на этапе обработки измерительной информации последовательно устанавливают зависимости и вычисляют коэффициенты, которые определяют погрешность измерения изменяющегося навигационного параметра, а затем восстанавливают/имитируют погрешность измерения с использованием вычисленных коэффициентов, зависимостей, набора физических параметров и случайных чисел, полученных с генератора случайных чисел. Причем при обработке измерительной информации для определения параметров, влияющих на характер погрешности, используется корреляционный анализ, а для определения коэффициентов функций, аппроксимирующих составляющие погрешности, используется многопараметрическая оптимизация. Повышается эффективность и качество обучения операторов ЛА. 1 ил.
Способ имитации систематических и случайных погрешностей оборудования для задач обучения операторов воздушных судов, заключающийся в регистрации измерительной информации и ее обработке, отличающийся тем, что при этом на этапе обработки измерительной информации последовательно устанавливают зависимости и вычисляют коэффициенты, которые определяют погрешность измерения изменяющегося навигационного параметра, а затем восстанавливают/имитируют погрешность измерения с использованием вычисленных коэффициентов, зависимостей, набора физических параметров и случайных чисел, полученных с генератора случайных чисел; причем при обработке измерительной информации для определения параметров, влияющих на характер погрешности, используется корреляционный анализ, а для определения коэффициентов функций, аппроксимирующих составляющие погрешности, используется многопараметрическая оптимизация.
| Д.В | |||
| Козис, О.О | |||
| Жаринов, В.Д | |||
| Суслов, Научно-технический вестник Санкт-Петербургского государственного университета информационных технологий, механики и оптики, 2010, N 4 (68), с.18-20, УДК | |||
| ПОРТСИГАР С ПРИСПОСОБЛЕНИЕМ ДЛЯ СКРУЧИВАНИЯ ПАПИРОС | 1922 |
|
SU621A1 |
| Способ построения маршрута маловысотного полета на виртуальном полигоне | 2018 |
|
RU2696047C1 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| US 9513125 B2, 06.12.2016 | |||
| WO 2011012675 A1, 03.02.2011. | |||

