Изобретение относится к диагностическим системам и предназначено для диагностирования информационно-преобразующих элементов (ИПЭ) бортового оборудования (БО) воздушного судна (ВС) на основе машинного обучения без учителя с автоматическим определением параметров обучения моделей. Под ИПЭ в изобретении подразумевается комплекс бортового оборудования (КБО) ВС, выполняющий свои функции путем получения, обработки (преобразования) и передачи информации через шину мультиплексного канала информационного обмена интерфейса магистрального последовательного системы электронных модулей (МКИО). Способ позволяет реализовать процесс автоматического создания диагностических моделей ИПЭ БО любой сложности с увеличением глубины поиска места отказа при отказах систем КБО, позволяющий тем самым минимизировать время поиска места отказа.
Известен метод диагностирования, реализуемый в экспертной системе (ЭС) функционального диагностирования авиационного радиоэлектронного оборудования [патент на полезную модель №77062 U1, G06F 15/00]. Данная ЭС содержит управляющий микропроцессор, измерительный блок, содержащий в своем составе первичные измерительные преобразователи (ПИП), вычислительную систему, включающую подсистему обработки информации (ПОИ), базу данных, систему управления базой данных (СУБД), базу знаний, базу экспертных знаний (БЭЗ), нейросетевую базу знаний (НСБЗ), систему управления базой знаний (СУБЗ), решатель (интерпретатор). Известная ЭС является вычислительной системой, в которую включены знания специалистов о некоторой конкретной проблемной области и которая в пределах этой области способна принимать экспертные решения. ЭС состоит из вычислительной системы и внешних устройств; управляющего микропроцессора, измерительного блока. Вычислительная система содержит базу знаний, базу данных, машину логического вывода (решатель, подсистему приобретения знаний и подсистему объяснений).
ЭС, построенная по указанному принципу, имеет следующие свойства: ЭС ограничена определенной сферой экспертизы - решение задач контроля и диагностики технического состояния бортового оборудования ЛА, способна рассуждать при сомнительных данных и объяснять полученные решения понятным способом, знания, которыми она оперирует, и механизм вывода - средство обработки знаний - отделены друг от друга, целенаправленна на использование правил, на выходе выдает совет, а не информацию, которая подлежит трудоемкой обработке пользователем, строится так, чтобы имелась возможность постоянного наращивания системы. В ЭС диагностирования функции подсистемы приобретения знаний выполняет база знаний, а подсистема объяснений выполняет функции решателя машина логического вывода (МЛВ) (интерпретатор).
Предлагаемая ЭС позволяет, используя метод функционального диагностирования, проводить непрерывный анализ технического состояния объектов ЛА в процессе их работы по назначению, оперативно получать информацию о техническом состоянии бортового оборудования ЛА, позволяет проводить работы по диагностированию без нарушения функциональных связей.
ЭС, наряду с использованием традиционных знаний, хранящихся в БЗ, используя нейросетевую базу, позволяет формализовать перечисленные выше проблемы, возникающие в процессе эксплуатации авиационного оборудования. Проблема сложности объектов в нейросетевой базе знаний решается на основе обучения погрешности измерений, отказы первичных измерений-преобразователей информации могут компенсироваться на основе моделей ассоциативной нейронной сети (аналитическая избыточность).
Основным недостатком описанного метода диагностирования является наличие и использование за основу субъективных знаний экспертов ЭС в некоторой конкретной области, что при составлении диагностических моделей, и наличии человеческого фактора, а также невозможности точного прогнозирования процессов изменения технического состояния авиационного радиоэлектронного оборудования в рамках его жизненного цикла, может приводить к неточности осуществления процесса диагностирования, а также к возникновению ошибок первого и второго рода при диагностировании. Также, недостатком данного метода является неавтономность обучения искусственной нейронной сети, используемой в ЭС, с целью формирования нейросетевой базы знаний. Отсутствие автоматизированности процесса формирования такой базы предполагает обучение с учителем: при обучении искусственной нейронной сети необходимо участие человека (оператора).
Однако сложность объекта контроля и диагностики, большая часть параметров которого не измеряется, содержит случайные (инструментальные и методические) погрешности. Чрезмерная сложность и отсутствие точной математической модели, существование критических (нерасчетных) режимов работ авиационного оборудования вызывает комплексные отказы измерителей и преобразователей системы. Все перечисленные выше проблемы снижают достоверность диагностирования технического состояния авиационного бортового оборудования. Также усложнение и увеличение элементной базы ЭС приводит к снижению надежности, отказоустойчивости и стойкости метода диагностики к изменяющимся внешним факторам.
Известен способ диагностирования, основанный на методе резервирования каналов конструктивно-функциональных модулей бортовых цифровых вычислителей летательных аппаратов на основе интеллектуальной диагностической системы в условиях интегрированной модульной авионики [патент на изобретение №2778366 C1, G06F 11/20]. Способ обеспечивает повышение отказоустойчивости за счет применения многоканального мониторинга интеллектуальной диагностической системой в режиме реального масштаба времени каналов обработки программного кода КФМ, что позволяет при достижении значения контролируемого параметра программного кода границ допусков функциональной зависимости (границ работоспособного состояния) заблаговременно реконфигурировать отказавший информационный канал КФМ (канал, в котором возник сбой) и использовать интеллектуальную диагностическую систему (ИДС) в режиме работы отказавшего канала БЦВС с индикацией о реконфигурации на функционирование ИДС летному экипажу. Технический результат рассматриваемого метода достигается тем, что в методе резервирования каналов КФМ БЦВС на основе ИДС реализуется принцип функционирования в интересах решения задачи автоматического построения модели подлежащего программной реконфигурации канала обработки информации за счет применения систем искусственного интеллекта, управляемого нейроконтроллером, что позволяет заблаговременно реконфигурировать отказавший канал КФМ на доступные вычислительные ресурсы ИДС в режиме БЦВС. При этом в ИДС происходит обучение (формирование моделей правильного функционирования КФМ БЦВС, функционирования в предотказном состоянии, функционирования в режиме отказа); запоминание (создание базы данных, включающих сформированные модели правильного функционирования КФМ с учетом упреждающих допусков), а также работа в режиме имитации БЦВС.
Недостатком данного метода является его узкая применяемость -предназначение заключается только для диагностирования и резервирования отказавших каналов КФМ БЦВС, а также отсутствие автоматизации определения оптимальных параметров обучения для каждого КФМ.
Известен способ и система для диагностирования промышленного объекта [патент на изобретение №2707423 С2, G06F 11/00]. Указанный технический результат достигается благодаря тому, что разработана система для диагностирования промышленного объекта, содержащая блок сбора данных, выполненный с возможностью сбора данных с комплекта датчиков промышленного объекта; блок модели промышленного объекта, выполненный с возможностью моделировать промышленный объект; блок анализа, выполненный с возможностью анализировать состояние промышленного объекта на основании данных, полученных от блока сбора данных, и модели промышленного объекта; причем блок анализа выполнен с возможностью делать заключение о нормальном или аномальном функционировании промышленного объекта на основании анализа; причем блок анализа выполнен с возможностью принимать данные об изменениях, внесенных в промышленный объект, и командовать блоку модели изменить модель в соответствии с внесенными изменениями. Сущность способа заключается в том, что с помощью комплекта датчиков, расположенных в элементах промышленного объекта, отслеживается состояние промышленного объекта. Далее данные с датчиков обрабатываются для диагностики состояния промышленного объекта. Данные с датчиков сопоставляются с данными, формируемыми заранее разработанной моделью промышленного объекта, по результатам сопоставления делается вывод об исправности промышленного объекта и его элементов, о необходимости ремонта и/или замены элементов промышленного объекта. Особенностью заявленного изобретения является использование инженерной модели промышленного объекта, наличие обратной связи, изменяющей модель промышленного объекта по данным о вмешательстве в работу промышленного объекта при устранении отказов, предотказных состояний и при выполнении сверхцикловых работ на плановых видах обслуживания (скрытых отказов). Технический результат, достигаемый данным решением, заключается в повышении точности диагностики промышленного объекта в части выявления предотказных состояний. Однако, несмотря на все положительные стороны изобретения, рассматриваемый способ и система для диагностирования промышленного объекта имеет ряд недостатков:
1. При отслеживании состояния по данным, полученным от датчиков, не учитываются возможные влияния внешних возмущающих воздействий, а также собственные шумы датчиков. Отсутствие учета влияния внешних возмущающих воздействий, в конечном итоге может повлиять на результат по выводу об исправности промышленного объекта, то есть возможность возникновения ошибок первого и второго рода.
2. Отсутствие унификации. Для каждого промышленного объекта возникает необходимость установки специализированных датчиков самой широкой номенклатуры, что отрицательно влияет на экономический эффект, получаемый от использования разработанного способа и системы для диагностирования промышленного объекта.
3. Не автоматизирован процесс создания эталонных моделей для сравнения результатов, полученных от датчиков в режиме реального времени. Разрабатываемые модели создаются вручную, что зачастую, для сложных объектов контроля не предоставляется возможным в полной мере.
Известен наиболее близкий к заявляемому способу, и выбранный в качестве прототипа, - способ диагностирования информационно-преобразующих элементов бортового оборудования воздушного судна на основе машинного обучения [патент на изобретение №2802976 C1, G06N 3/02, G06F 11/00, G05B 23/00]. Способ обеспечивает решение задачи диагностики бортового оборудования, которая позволяет выявить неисправности оборудования, а также уменьшить время поиска места и причин отказа за счет применения многоканального контроля информационно-преобразующих элементов комплекса бортового оборудования нейросетевым классификатором состояний, программное обеспечение которого реализуется на основе алгоритмов функционирования искусственных нейронных сетей Кохонена, в режиме реального масштаба времени, что позволяет создавать на этапе испытаний комплекса бортового оборудования диагностические модели каждого информационно-преобразующего элемента (до конструктивно-съемной единицы), с целью их диагностирования способом классификации состояний искусственными нейронными сетями Кохонена с применением методов машинного обучения. Сущность изобретения заключается в том, что в нейросетевом классификаторе состояний, построенном на основе функционирования алгоритмов искусственных нейронных сетей Кохонена, представленного в виде программного кода, и отдельного вычислительного модуля, происходит его автоматическое обучение в режиме реального масштаба времени. С определенной дискретностью через модуль формирования обучающей выборки, содержащий энергонезависимое постоянное запоминающее устройство (ПЗУ), через интегрированную локальную сеть бортового оборудования поступают числовые массивы данных входных и выходных сигналов каждого информационно-преобразующего элемента бортового оборудования, с последующим автоматическим распределением входной информации по кластерам. Однако, несмотря на все положительные стороны изобретения, рассматриваемый способ имеет ряд недостатков:
1. При сборе обучающих данных, а также при диагностировании в реальном времени по данным, полученным от датчиков, не учитываются возможные влияния внешних возмущающих воздействий, а также собственные шумы датчиков: например, полет воздушного судна на различных режимах работы вызывает вибрацию, которая отрицательно влияет на функционирование бортового оборудования (см. ГОСТ Р 57211-2016. Внешние воздействия. Данные о воздействии на электротехническое оборудование вибрации и ударов. Оборудование, транспортируемое реактивным самолетом с неизменяемой геометрией крыла. - Москва: Стандартинформ, 2016. - 35 с.). Отсутствие учета влияния вышеуказанных возмущающих воздействий, в конечном итоге может повлиять на результат по выводу о работоспособности бортового оборудования, то есть возможности возникновения ошибок первого и второго рода при диагностировании.
2. Не автоматизирован процесс определения оптимальных размеров и структуры искусственной нейронной сети Кохонена (оптимальных параметров обучения): так как для каждого информационно-преобразующего элемента создается своя нейронная сеть, то существенным недостатком способа является создание каждой сети с одинаковыми параметрами для различных по своему назначению и принципу действия информационно-преобразующих элементов, у которых структура и значения данных отличные друг от друга.
Способ обеспечивает решение задачи диагностики комплекса бортового оборудования, которая позволяет выявить неисправности оборудования, а также уменьшить время поиска места и причин отказа за счет применения многоканального контроля информационно-преобразующих элементов комплекса бортового оборудования модулем диагностики, программное обеспечение которого реализуется на основе комплексирования трех модифицированных алгоритмов машинного обучения, с модификацией в части автоматического определения оптимальных параметров обучения моделей для каждого информационно-преобразующего элемента, за счет предварительного анализа обучающей выборки, что обеспечивает полную автономность осуществления способа. Работа модуля диагностики осуществляется в режиме реального масштаба времени, что позволяет создавать на этапе испытаний комплекса бортового оборудования диагностические модели каждого информационно-преобразующего элемента (до конструктивно-съемной единицы: модуля, субмодуля), с целью их диагностирования комплексным применением алгоритмов машинного обучения с модифицированным алгоритмом фильтрации на основе одномерного фильтра Калмана, с модификацией в части автоматического определения оптимальных параметров фильтра для каждого информационно-преобразующего элемента, за счет предварительного анализа обучающей выборки, что обеспечивает полную автономность осуществления способа диагностирования.
Технический результат изобретения достигается тем, что в способе диагностирования информационно-преобразующих элементов бортового оборудования воздушного судна на основе машинного обучения реализуется принцип функционирования в интересах решения задачи автоматического построения диагностических моделей, подлежащих контролю информационно-преобразующих элементов бортового оборудования. Процесс диагностирования реализуется на отдельном унифицированном нейровычислительном модуле открытой архитектуры с типоразмером платы 6U с применением стандарта ГОСТ Р 52070-2003, а также с использованием комплексирования трех модифицированных алгоритмов машинного обучения, что позволит увеличить глубину поиска места отказа встроенным контролем в реальном времени, и, как следствие, уменьшить время поиска отказа за счет локализации его места, что позволит тем самым повысить коэффициент готовности воздушного судна. При этом в модуле диагностики происходит обучение (формирование кластера, определяющего работоспособное техническое состояние каждого информационно-преобразующего элемента: кластер, сформированный координатами входного и выходного сигнала информационно-преобразующего элемента, для которого автоматически формируется информационная диагностическая модель в виде ограниченного геометрического пространства признаков в выбранной метрике); фиксация (создание базы данных, включающих сформированные диагностические модели эталонного функционирования информационно-преобразующих элементов); отнесение данных контроля в реальном времени кластеру, описывающему работоспособное состояние информационно-преобразующего элемента: в случае, если данные реального времени принадлежат сформированному кластеру - в бортовую автоматизированную систему контроля выводится сообщение о работоспособном состоянии информационно-преобразующего элемента, в противном случае - выводится сообщение о неработоспособном состоянии информационно-преобразующего элемента.
Сущность изобретения заключается в том, что в модуле диагностики, построенном на основе функционирования трех модифицированных алгоритмов машинного обучения, представленных в виде программного кода, происходит их автоматическое обучение и диагностирование информационно-преобразующих элементов в режиме реального масштаба времени. С определенной дискретностью через программаторы, обращающиеся к энергонезависимым постоянным запоминающим устройствам (ПЗУ), МКИО по ГОСТ Р 52070-2003, и с помощью программаторов данные каждого информационно-преобразующего элемента записываются в соответствующие ячейки ПЗУ, согласно своим адресам оконечных устройств и подадресам передаваемых слов данных. После чего обученные данные проходят фильтрацию на основе модифицированного фильтра Калмана с автоматическим определением оптимальных параметров фильтра для каждого информационно-преобразующего элемента. Далее происходит обучение модифицированного алгоритма для каждого информационно-преобразующего элемента, после чего данные реального времени также подвергаются фильтрации на основе модифицированного фильтра Калмана, и передаются на вход обученного алгоритма для функционального диагностирования в режиме реального времени.
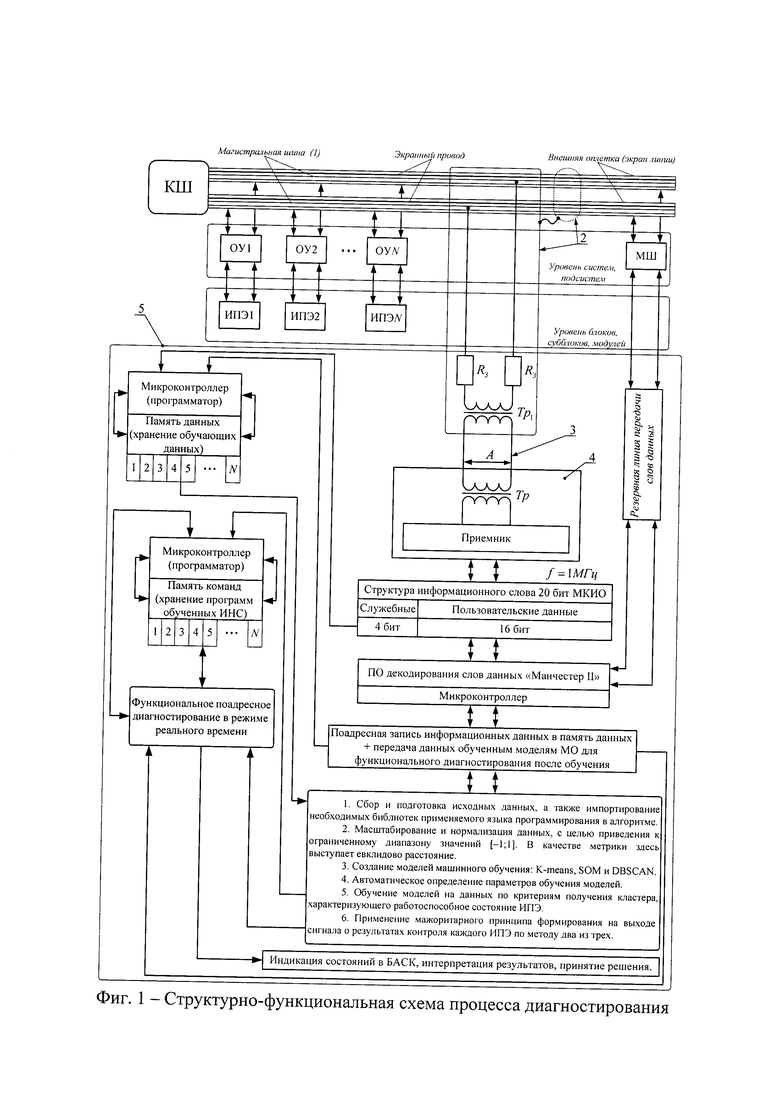
На фиг.1 показана структурно-функциональная схема процесса диагностирования, которая представляет собой последовательный процесс взаимодействия модуля диагностики через магистральную шину МКИО с оконечными устройствами и информационно-преобразующими элементами, входящими в их состав: КШ - контроллер шины; ОУ - оконечное устройство; МШ - монитор шины; ИПЭ - информационно-преобразующий элемент; 1 - магистральная шина; 2 - экран; 3 - шлейф; 4 - устройство интерфейса; 5 - модуль диагностики; Тр - трансформатор гальванической развязки; Тр1 - согласующий трансформатор; Rз - защитный резистор; ПО - программное обеспечение. Модуль диагностики (5) подключается как унифицированное устройство интерфейса к основной и резервной магистральной шине (1), которая выполнена из кабеля, содержащего витую экранированную пару проводников в защитной оболочке через ответвитель, представляющий собой шлейф (3), состоящий из двух защитных резисторов Rз, экрана (2), а также согласующего трансформатора Тр1, и трансформатора гальванической развязки Тр.
Слова данных от оконечных устройств (ОУ), необходимые для обучения модуля диагностики, через микроконтроллер, запрограммированный на декодирование слов данных (СД) «Манчестер II», (кл) поадресно записываются в память данных в течение работы бортового оборудования на этапе испытаний. После создания базы обучающих информационных данных в модуле диагностики выполняются следующие команды: прием адресных данных от ОУ из памяти данных; инициализация команды создания алгоритма машинного обучения для конкретного адреса, содержащего в себе данные; формирование алгоритмом кластера, характеризующего работоспособное состояние каждого адреса и подадреса данных, а также сохранение программ обученных алгоритмов в память команд модуля диагностики. Далее выполняется процесс поадресной передачи декодированных СД на вход алгоритма с целью функционального диагностирования в режиме реального времени.
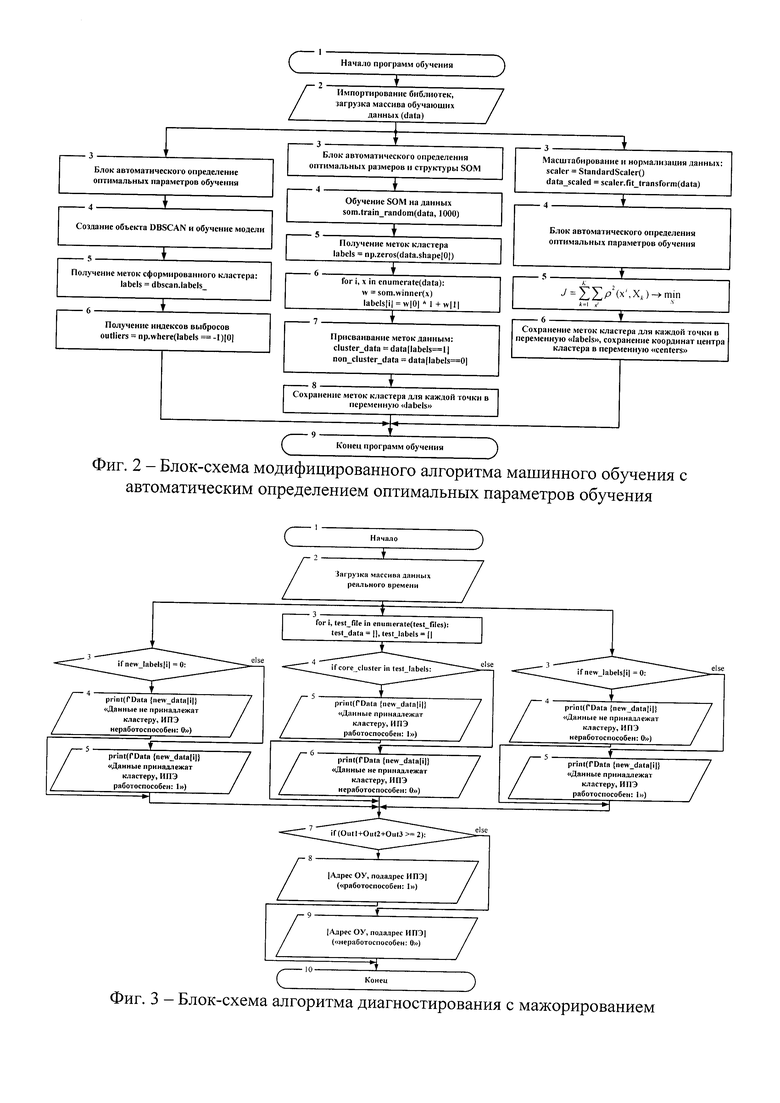
На фиг. 2 показана блок-схема модифицированного алгоритма машинного обучения с автоматическим определением оптимальных параметров обучения. Для решения задач автоматического (без учителя) формирования информационных диагностических, наиболее подходящим методом машинного обучения является кластеризация, то для решения вышеуказанных задач был сформулирован ряд требований для разрабатываемого алгоритма диагностирования, на основе МО. Сформулированным требованиям удовлетворяют следующие методы кластеризации:
1. К-средних (K-means).
2. DBSCAN (Density Based Spatial Clustering of Application with Noise - пространственная кластеризация для приложений с шумами).
3. SOM (Self Organizing Map, или нейронная карта Кохонена).
Параметры обучения, которые автоматически формируются в модифицированном алгоритме (указаны в виде блоков) реализованы в виде программы на языке Python.
Для SOM: программа позволяет в реальном времени, обращаясь к массивам данных, с использованием функции «find_optimal_params», рассчитывать значения оптимальных размеров и структуры SOM. программа использует библиотеку «MiniSom» для создания и обучения самоорганизующейся карты (Self-Organizing Map, SOM) на наборе данных. Программа загружает данные и масштабирует их. Затем она определяет функцию «fmd_optimal_params», которая перебирает возможные значения параметров SOM и находит оптимальные параметры, максимизирующие точность предсказания. Далее программа создает SOM с найденными оптимальными параметрами, обучает его на обучающей выборке и преобразует данные с помощью этой SOM. Результаты преобразования сохраняются в соответствующие переменные.
Для K-means: В этом примере используется библиотека «scikit-learn» для реализации алгоритма K-means и вычисления коэффициента силуэта. Данные загружаются из файла «data.npy». Диапазон значений для количества кластеров задается переменными «min_clusters» и «max_clusters». В цикле происходит обучение модели K-means с каждым количеством кластеров, а затем вычисляется коэффициент силуэта для оценки качества кластеризации. Если текущий коэффициент силуэта лучше предыдущего лучшего значения, то обновляются переменные «best_score» и «best_clusters». В конце программы выводятся лучшие параметры.
Для DBSCAN: программа использует библиотеку «scikit-learn» для реализации DBSCAN и генерации начальных массивов данных. Производится перебор возможных и поиск оптимальных значений параметров «eps» и «min_samples» в заданных диапазонах (для каждого массива обучающих данных) с использованием функции «fmd_optimal_params». Производится вывод параметров обучения, обучение модели на эталонных данных, сохранение меток кластера. Производится представление цикла «for» для перебора элементов в списке данных реального времени; в каждой итерации цикла переменной «i» присваивается индекс элемента в списке, а переменной «test_file» - значение элемента; после этого необходимо создать пустые списки «test_data» и «test_labels».
На фиг. 3 показана блок-схема алгоритма диагностирования с мажорированием по методу «минимум два из трех».
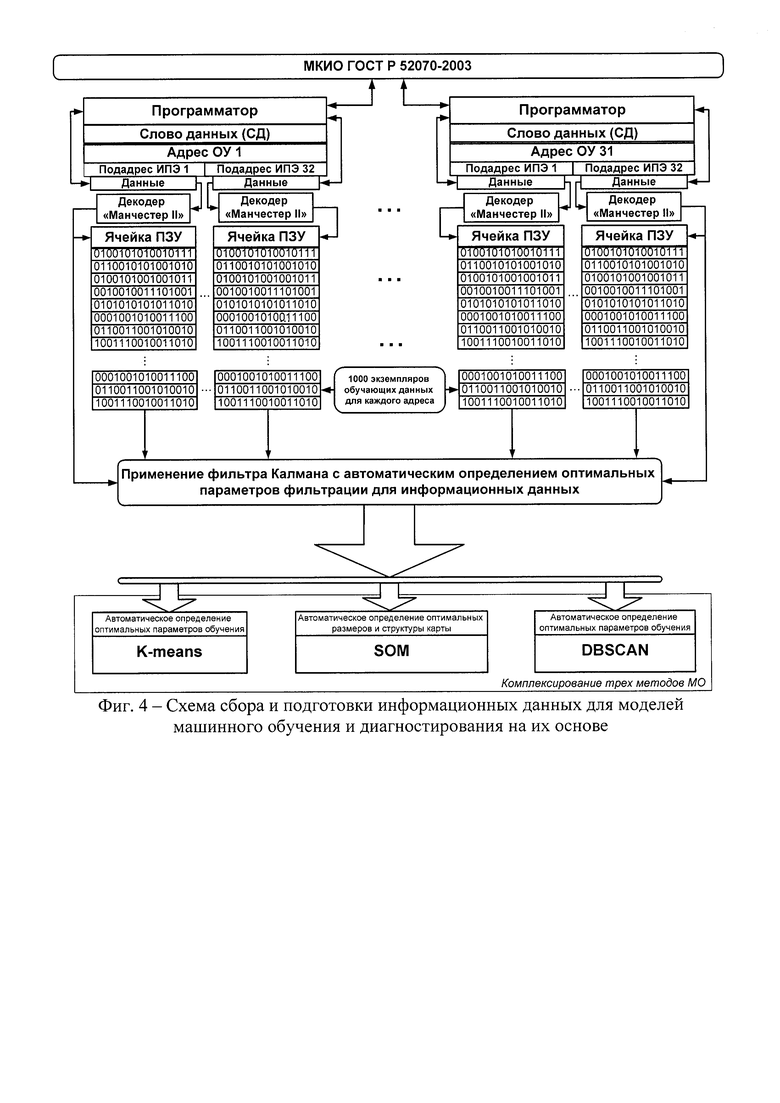
На фиг. 4 показана схема сбора и подготовки информационных данных для моделей машинного обучения и диагностирования на их основе. Передаваемые информационные данные, входящие в состав СД, а также имеющие в своей структуре подадрес передаваемых СД и адрес ОУ, являются данными, закодированными биполярным фазоманипулированным кодом «Манчестер II». С целью работы с исходными данными, согласно фиг.4, СД декодируются, и с помощью программаторов записываются в соответствующие ячейки ПЗУ, согласно своим адресам ОУ и подадресам передаваемых СД. Программатор - это программно-аппаратное устройство, предназначенное для записи информации в ПЗУ. Помимо записи, подобное устройство должно обеспечивать возможность считывания информации из ПЗУ микросхемы.
Одним из методов, позволяющих эффективно решать задачи кластеризации, - метод К-средних (K-means). K-means - это алгоритм кластеризации, который используется для группирования данных в K кластеров. Однако, когда K=1, алгоритм может быть эффективно использован для поиска аномалий в данных, то есть данных, соответствующих неработоспособному состоянию объекта контроля. Для этого алгоритм K-means с одним кластером применяется к данным, и центр кластера вычисляется как среднее значение всех точек данных. Затем расстояние между каждой точкой данных и центром кластера вычисляется, и точки данных, которые находятся на расстоянии больше определенного порога от центра кластера, считаются аномалиями.
Основная идея алгоритма заключается в минимизации суммарного квадратичного отклонения точек кластера от центра этого кластера, то есть

где K - известное число кластеров.
Идея адаптированного под решение задач диагностирования алгоритма K-means с одним кластером заключается в проверке декодированных информационных данных в реальном времени. При попадании значений входа и выхода в сформированный кластер работоспособного состояния, алгоритмом выводится сообщение «Данные принадлежат кластеру, ИПЭ работоспособен: 1». В случае если данные, полученные при информационном обмене между устройствами МКИО, не попадают в сформированный кластер работоспособного состояния, алгоритмом выводится сообщение «Данные не принадлежат кластеру, ИПЭ неработоспособен: 0».
Второй используемый в изобретении метод кластеризации - метод DBSCAN (Density-Based Spatial Clustering of Applications with Noise - пространственная кластеризация, основанная на плотности для приложений с шумами). Метод DBSCAN позволяет эффективно обнаруживать кластеры произвольной формы, а также точки-выбросы (шум), проявляя высокую чувствительность к изменению данных.
Идея адаптированного под решение задач диагностирования алгоритма DBSCAN с одним кластером также заключается в проверке декодированных информационных данных в реальном времени. При попадании значений входа и выхода в сформированный кластер работоспособного состояния, алгоритмом выводится сообщение «Данные принадлежат кластеру, ИПЭ работоспособен: 1». В случае если данные, полученные при информационном обмене между устройствами МКИО, не попадают в сформированный кластер работоспособного состояния, алгоритмом выводится сообщение «Данные не принадлежат кластеру, ИПЭ неработоспособен: 0» и помечаются как выбросы.
Третий используемый в изобретении метод кластеризации - метод SOM (Self-Organizing Map), также известный как нейронная карта Кохонена. SOM - это вид нейронных сетей, используемых для кластеризации и визуализации многомерных данных. SOM представляет собой двухслойную нейронную сеть, состоящую из узлов (нейронов), организованных в виде двумерной сетки.
В SOM нейроны активного слоя не упорядочены. В процессе обучения подстраиваются веса только одного нейрона-победителя каждой ИНС для ИПЭ. Каждый i-й нейрон 2-го слоя имеет собственный вектор весов Wi, который сравнивается с входным вектором X. Сравнение подразумевает вычисление расстояния между X и Wi, так что в слое Кохонена появляется нейрон-победитель с номером j, веса которого имеют минимальное расстояние до входного вектора:

В качестве метрики здесь выступает евклидово расстояние:

Если векторы X и W нормализованные, то в качестве меры близости можно использовать скалярное произведение. Выход нейрона можно описать формулой:

При этом выход нейрона j оказывается максимальным при одинаковых X и W:

Нормализация векторов выполняется по формулам:
где  ,
,  - нормализованные векторы, приведены к ограниченному диапазону значений [-1;1].
- нормализованные векторы, приведены к ограниченному диапазону значений [-1;1].
Результатом работы слоя конкурирующих нейронов в структуре программной части модуля диагностики при подаче на входной слой некоторого вектора X является определение нейрона, который имеет наибольший выходной сигнал yj (нейрон-победитель). Этот нейрон обладает весовым вектором Wj, который наиболее близок к входному вектору.
Нейроны слоя Кохонена работают не изолированно, между ними существуют соревновательные связи, с помощью которых близкие нейроны усиливают сигналы друг друга.
В алгоритме происходит обучение нейронной сети типа SOM на ранее загруженных данных. SOM объединяет данные в кластер и присваивает кластеру работоспособного состояния метку. Затем происходит вывод меток кластера и определение, принадлежат ли новые данные к кластеру, или нет.
Далее данные разделяются на данные, принадлежащие и не принадлежащие кластеру, с выводом соответствующих сообщений.
При сборе обучающей информации на данный процесс могут воздействовать различные внешние возмущающие воздействия. В конечном итоге собранные данные могут содержать шумы, ошибки и другие аномалии, которые могут привести к неправильной оценке технического состояния системы. Фильтрация данных позволяет устранить шумы и ошибки в данных, что повышает точность оценки технического состояния системы. Это особенно важно для систем, где даже малейшие отклонения могут привести к серьезным последствиям.
Кроме того, фильтрация данных может помочь снизить объем данных, которые нужно обрабатывать, что упрощает и ускоряет процесс идентификации технических состояний. В целом, использование фильтрации данных является необходимым для достижения более точной и надежной оценки технического состояния системы и повышения ее эффективности и безопасности, а также позволит избежать возникновения ошибок первого и второго рода при применении разработанных алгоритмов.
Для фильтрации обучающих данных, а также данных реального времени был модифицирован одномерный фильтр Калмана с автоматическим определением параметров фильтра на языке программирования Python: данная программа реализует фильтр Калмана для одномерной временной серии данных. Он использует библиотеки «numpy» и «pandas» для обработки данных. Функция «kalman_filter» принимает на вход массив данных, параметры шума системы (Q) и шума измерений (R). Она инициализирует переменные и массивы для хранения отфильтрованных данных, ошибки предсказания (Р), предсказанных значений (x) и коэффициента Калмана (K). Затем она проходит по каждому элементу данных и применяет фильтр Калмана для предсказания и обновления значения. На первой итерации функция сохраняет исходное значение в отфильтрованные данные и устанавливает ошибку предсказания равной 1. На следующих итерациях функция предсказывает значение на основе предыдущего отфильтрованного значения и ошибки предсказания, а затем обновляет значение на основе измеренного значения и ошибки предсказания.
Способ осуществляется следующим образом.
1. Осуществляется сбор и подготовка исходных данных, а также импортирование необходимых библиотек применяемого языка программирования в алгоритме.
На этом шаге исходные данные представляют собой выборку, полученную в ходе проведения испытаний БО при различных режимах работы, которая поадресно фиксируется в память данных вычислительного модуля. Каждому адресу данных, полученных через обращение к МКИО, соответствует массив входных и выходных значений, которые описывают заведомо работоспособное техническое состояние диагностируемых ИПЭ. В процессе сбора обучающих данных их количество будет определяться из вычислительных возможностей модуля диагностики, а также возможностей постоянного запоминающего устройства (ПЗУ).
2. Осуществляется масштабирование и нормализация данных, с целью приведения к ограниченному диапазону значений [-1;1]. В качестве метрики здесь выступает евклидово расстояние.
3. Автоматическое создание моделей машинного обучения: K-means, SOM и DBSCAN. На этом этапе производится создание используемых моделей машинного обучения для каждого сохраненного адреса и подадреса информационных данных, ввод их характеристик, назначение переменных для хранения промежуточных результатв вычислений. Созданные модели машинного обучения обращаются через программаторы к каждому сохраненному массиву данных входа и выхода соответствующего ИПЭ. Таким образом, для каждого ИПЭ формируются 3 модели машинного обучения.
4. Автоматическое определение параметров обучения моделей: количество нейронов, структура ИНС, метод обучения, функция активации (для SOM); количество кластеров, параметр «random_state» - это параметр, который используется в алгоритмах машинного обучения для установки начального состояния генератора случайных чисел (для K-means); параметров «eps» и «min_samples», которые определяют, как алгоритм будет проводить кластеризацию, «eps» определяет радиус окружности, в которой должно находиться не менее «min_samples» объектов для того, чтобы они были отнесены к одному кластеру (для DBSCAN).
5. Осуществляется обучение моделей на данных по критериям получения кластера, описывающего работоспособное состояние ИПЭ. Для определения границ кластеров целесообразно использовать статистические методы, такие, как правило трех сигм, который определяет границу, выше которой находятся точки данных с высокой вероятностью быть аномалиями. Правило трех сигм (или правило трех сигм Лапласа) в кластеризации используется для определения границ кластеров и выбросов в данных.
6. Применение мажоритарного принципа формирования на выходе сигнала о результатах контроля ИПЭ по методу два из трех при контроле данных, полученных от ИПЭ в реальном времени. Данный принцип используется с целью недопущения ложной идентификации данных реального времени алгоритмами (ошибок первого и второго рода).
7. Вывод соответствующих сообщений с учетом пункта 6, а также запись информации в штатную бортовую автоматизированную систему контроля воздушного судна.
Отличительными особенностями разработанного способа являются:
- представлен полностью автоматический процесс диагностирования ИПЭ на основе комплексирования трех модифицированных алгоритмов машинного обучения, с модификацией в части автоматического определения оптимальных параметров обучения моделей для каждого информационно-преобразующего элемента, за счет предварительного анализа обучающей выборки, что обеспечивает полную автономность осуществления способа;
- наличие единой унифицированной методической и алгоритмической основы построения и применения соответствующих диагностических моделей ИПЭ любой сложности для определения технического состояния всего КБО, выполняющего свои функции через МКИО, в реальном времени;
- при сборе обучающих информационных данных, а также данных реального времени, полученных через МКИО от ОУ, учитываются возможные влияния внешних возмущающих воздействий, а также собственные шумы датчиков. С целью устранения (компенсации) возмущающих воздействий, а также недопущения неправильной оценки технического состояния системы модулем диагностики, был модифицирован одномерный фильтр Калмана с автоматическим определением оптимальных параметров фильтрации.
- возможность охвата контролем всего КБО ВС, выполняющего свои функции через МКИО: до тридцати одного ОУ, каждый из которых является отдельной системой ВС, и может включать до тридцати двух подадресов ОУ (блоков, модулей, субмодулей);
- процесс формирования кластеров, описывающих работоспособное состояние каждого ИПЭ БО ВС, является полностью автоматическим и не предусматривает наличие оператора (человека): при решении задач формирования кластеров, применяется метод кластеризации, который предполагает применение метода «обучения без учителя»;
- разработанный способ диагностирования сочетает в себе комплексирование трех модифицированных алгоритмов машинного обучения с автоматическим определением оптимальных параметров обучения, а также мажоритарный принцип формирования на выходе сигнала о результатах контроля каждого ИПЭ БО по методу «два из трех», с целью повышения достоверности диагноза, а также недопущения возникновения ошибок первого и второго рода.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2024 |
|
RU2831917C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2023 |
|
RU2809719C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2816667C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ИНФОРМАЦИОННО-ПРЕОБРАЗУЮЩИХ ЭЛЕМЕНТОВ БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНОГО СУДНА НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2022 |
|
RU2802976C1 |
| МЕТОД РЕЗЕРВИРОВАНИЯ КАНАЛОВ КОНСТРУКТИВНО-ФУНКЦИОНАЛЬНЫХ МОДУЛЕЙ БОРТОВЫХ ЦИФРОВЫХ ВЫЧИСЛИТЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОСНОВЕ ИНТЕЛЛЕКТУАЛЬНОЙ ДИАГНОСТИЧЕСКОЙ СИСТЕМЫ В УСЛОВИЯХ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2021 |
|
RU2778366C1 |
| СПОСОБ И СИСТЕМА ВЫЯВЛЕНИЯ ОБФУСЦИРОВАННЫХ ВРЕДОНОСНЫХ КОМАНД В СИСТЕМНОЙ КОНСОЛИ ОПЕРАЦИОННОЙ СИСТЕМЫ | 2024 |
|
RU2838483C1 |
| СПОСОБ НЕЙРОСЕТЕВОЙ КЛАСТЕРИЗАЦИИ ПРОСТРАНСТВЕННО-РАСПРЕДЕЛЕННОЙ БЕСПРОВОДНОЙ СЕНСОРНОЙ СЕТИ | 2024 |
|
RU2836294C1 |
| СПОСОБ РЕКОНФИГУРАЦИИ БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2024 |
|
RU2835221C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2445598C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЫЯВЛЕНИЯ ОБЪЕМНЫХ ОБРАЗОВАНИЙ ПОЧЕК НА КОМПЬЮТЕРНЫХ ТОМОГРАММАХ БРЮШНОЙ ПОЛОСТИ | 2024 |
|
RU2839531C1 |
Изобретение относится к диагностическим системам. Технический результат повышение точности выявления неисправности бортового оборудования (БО) воздушного судна (ВС). Способ диагностирования комплекса бортового оборудования воздушных судов на основе машинного обучения без учителя с автоматическим определением параметров обучения моделей, содержащий этапы, на которых: осуществляется сбор и подготовка исходных данных, а также импортирование необходимых библиотек применяемого языка программирования в алгоритме, определяют передаваемые информационные данные, осуществляют автоматическое определение оптимальных параметров одномерного фильтра Калмана, применяется модифицированный фильтр Калмана для собранных данных, осуществляется автоматическое создание моделей машинного обучения K-means, SOM и DBSCAN, осуществляется автоматическое определение параметров обучения моделей, производится обучение моделей на данных по критериям получения кластера, описывающего работоспособное состояние каждого информационно-преобразующего элемента, применяется модифицированный фильтр Калмана для данных реального времени. 4 ил.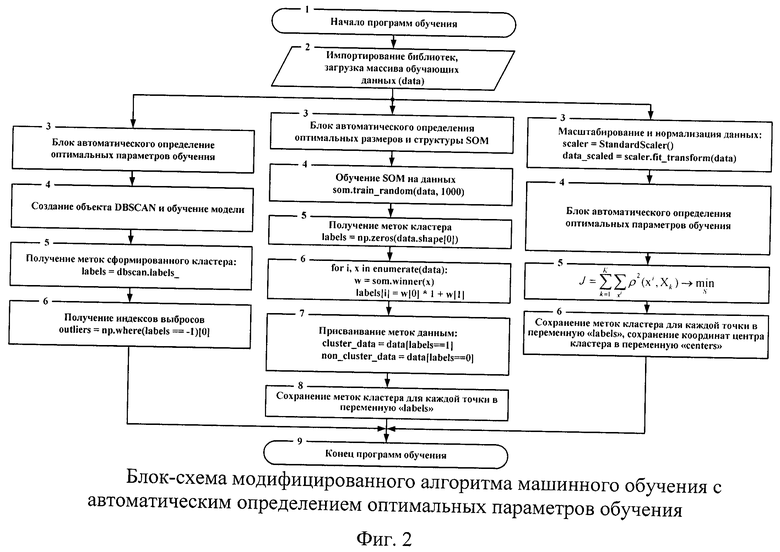
Способ диагностирования комплекса бортового оборудования воздушных судов на основе машинного обучения без учителя с автоматическим определением параметров обучения моделей, содержащий этапы, на которых:
осуществляется сбор и подготовка исходных данных, а также импортирование необходимых библиотек применяемого языка программирования в алгоритме,
определяются передаваемые информационные данные, входящие в состав слов данных, а также имеющие в своей структуре подадрес передаваемых слов данных и адрес оконечных устройств, являющиеся данными, закодированными биполярным фазоманипулированным кодом «Манчестер II», и с целью работы с исходными данными слова данных декодируются и с помощью программаторов записываются в соответствующие ячейки ПЗУ, согласно своим адресам оконечных устройств и подадресам передаваемых слов данных,
осуществляется автоматическое определение оптимальных параметров одномерного фильтра Калмана,
применяется модифицированный фильтр Калмана для собранных данных,
осуществляется автоматическое создание моделей машинного обучения K-means, SOM и DBSCAN,
осуществляется автоматическое определение параметров обучения моделей,
производится обучение моделей на данных по критериям получения кластера, описывающего работоспособное состояние каждого информационно-преобразующего элемента,
применяется модифицированный фильтр Калмана для данных реального времени,
осуществляется передача адресных информационных данных в реальном времени обученным моделям с целью функциональной диагностики,
осуществляется применение мажоритарного принципа формирования на выходе сигнала о результатах контроля ИПЭ по методу два из трех при контроле данных, полученных от ИПЭ в реальном времени,
выводятся соответствующие сообщения о работоспособности (неработоспособности), а также производится запись информации в штатную бортовую автоматизированную систему контроля воздушного судна.
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ ЦЕЛОСТНОСТИ ВОЗДУШНЫХ СУДОВ НА ВСЕХ УЧАСТКАХ ПОЛЕТА | 2013 |
|
RU2542746C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ДИАГНОСТИРОВАНИЯ ПРОМЫШЛЕННОГО ОБЪЕКТА | 2018 |
|
RU2707423C2 |
| CN 109987252 A, 09.07.2019 | |||
| US 9969508 B2, 15.05.2018. | |||

