Изобретение относится к пеленгаторам направления прихода электромагнитных, звуковых и других колебаний с использованием разнесенных антенн и фазового метода измерений. Предназначено для преимущественного применения в системах радиолокации и радионавигации, определяющих параметры движения летательных аппаратов (ЛА) и других объектов.
Известен фазовый способ пеленгации [1], основанный на приеме, ограничении по амплитуде и сравнении двух сигналов по фазе, при этом один из сигналов предварительно сдвигают по фазе на 90°. Сигналы формируют с помощью установленных по окружности в азимутальной плоскости n приемных антенн с возможностью их электронного вращения с угловой скоростью Ω вокруг приемной антенны, размещенной в центре окружности. Антенны, размещенные по окружности, поочередно коммутируют с частотой Ω. Сигнал, принимаемый центральной антенной, преобразуют по частоте, выделяют напряжение промежуточной частоты и путем совместной обработки с коммутируемыми сигналами определяют угол азимута направления на наземный объект. Недостатком способа является отсутствие возможности определения угла места объекта, например, ЛА.
Этот недостаток в известном способе [2] устраняют путем установки в угломестной плоскости второй центральной антенны, отстоящей от первой на заданное расстояние по высоте. Сигнал, принимаемый второй антенной, подвергают преобразованию, аналогичному рассмотренному выше, с последующим формированием разности фаз первого и второго сигналов. Этим обеспечивают определение угла места объекта.
Недостатки способов состоят в требовании большого количества антенн в азимутальной плоскости и низкой точности (отсутствии) пеленгации в угломестной.
Известен способ измерения угловых координат движущихся объектов (пеленгации) фазовым методом, основанный на измерении разности фаз монохроматического колебания, излучаемого объектом и принимаемого парами антенн, разнесенных в пространстве на расстояния, называемые базами [3,4]. Направление на объект определяют направляющими косинусами угла прихода колебания, отсчитываемыми относительно взаимно перпендикулярных баз. Размер наибольшей точной неоднозначной базы (шкалы) bт задают исходя из требуемой точности измерения угловых координат, размер минимальной грубой однозначной базы bг - из условия однозначности отсчета: bт≤λ0/2, где λ0 - длина волны колебания. Количество и размеры промежуточных баз, необходимых для согласования грубой и точной шкал, выбирают из условия: удвоенная максимальная погрешность измерения разности фаз по грубой шкале не должна превышать интервал однозначности 2π точной шкалы. Конкретные алгоритмы раскрытия неоднозначности фазовых измерений, применяемые на практике, также известны [5].
Недостатком способа является необходимость использования значительного числа пространственно-разнесенных антенн, объединенных высокостабильными каналами связи.
Наиболее близким по технической сущности (прототипом) к заявляемому изобретению является способ измерения углов в фазовых многошкальных угломерных системах [6], заключающийся в излучении с борта летательного аппарата двух и более масштабных частот, приеме излученных масштабных частот на две пары приемных антенн, расположенных на расстоянии (базе), соответствующем точной шкале измерения угла, и перпендикулярно друг к другу, измерении (далее по тексту формулы и описания способа [6]) «фаз по всем масштабным частотам, преобразовании измеренного значения фазы в величину расстояния, соответствующего задержке прихода волны на одну из пары антенн по каждой базе, раскрытии неоднозначности измерения расстояния с помощью масштабных шкал, образованных масштабными частотами, последовательно начиная с грубой шкалы, преобразовании точного значения расстояния по каждой базе в направляющие косинусы угла прихода волны.» Технический результат заключается в снижении количества приемных антенн (достаточно четырех, в некоторых случаях трех) и достигается излучением с борта ЛА нескольких (двух, трех и более) масштабных частот Fm1, Fm2, Fm3,…, образующих несколько масштабных шкал. Масштабные частоты выбирают таким образом, чтобы длина волна грубой шкалы bг (видимо, λг) была приблизительно «равна длине выбранной точной базы bт», а длина волны точной шкалы выбирается исходя из требуемой точности определения угловых координат.
Достоинством способа-прототипа являются меньшие затраты на производство, строительство и эксплуатацию систем, реализующих способ, по сравнению с аналогичными по назначению многобазовыми системами, содержащими большое число пространственно-разнесенных приемных антенн. Особенно важным это свойство является при разработке новых угломерных систем.
Вместе с тем, имеется значительная категория уже существующих фазовых систем пеленгации с базовой многошкальностью, находящихся на различных стадиях эксплуатации и применения. Примером служит семейство сверхвысокоточных (прецизионных) многопараметрических фазовых систем типа «Вега» [7], обладающих разветвленной антенной системой с большим числом антенн и измерительных баз. Системы входят в состав полигонных измерительных комплексов отечественных космодромов [8]. Применительно к таким системам способ [6] недостаточно эффективен, поскольку не использует такой резерв повышения точности (дополнительно к точной базе), как имеющиеся промежуточные базы и соответствующие угловые измерения. Это является основным недостатком способа-прототипа.
В качестве неточностей можно указать, во-первых, на неоднократно упоминаемые измерение, преобразование и раскрытие неоднозначности расстояния, соответствующего задержке прихода волны на одну из пары антенн, и, во-вторых, на требование равенства длины волны грубой шкалы λг длине точной базы bт. В первом случае определение однозначного значения расстояния между ЛА и приемной антенной является ненужным, поскольку, как справедливо следует из текста описания [6] в целом, способ реализует разностно-дальномерный метод пеленгации, предусматривающий непосредственное определение разностей дальностей по разностям фаз без предварительного измерения самих дальностей. Во втором случае более правильным является требование равенства длины волны λг удвоенной базе bт, что с очевидностью следует из соотношения (5) описания (с соответствующей заменой обозначений λ и bг).
Целью заявляемого изобретения является разработка способа пеленгации излучающего объекта в фазовых многошкальных угломерных системах, обеспечивающего повышение точности определения угловых координат объекта за счет совместного использования двух типов масштабных шкал - шкал масштабных баз и шкал масштабных частот.
Для достижения поставленной цели в способе пеленгации излучающего объекта (в частном случае ЛА) в фазовых многошкальных угломерных системах, заключающемся в определении направляющих косинусов угла прихода излучаемого сигнала, содержащего две и более масштабные частоты, осуществляют прием сигнала на четыре наземные приемные антенны, попарно размещенные по двум взаимно перпендикулярным осям. Антенны расположены на расстоянии базы, соответствующей шкале заданной точности пеленгации. Далее выполняют измерение разностей фаз по всем масштабным частотам, преобразование разностей фаз в разности расстояний от объекта до пар приемных антенн, раскрытие неоднозначности определения разностей расстояний с помощью масштабных шкал, образованных масштабными частотами, и преобразование значений разностей расстояний для обеих баз в оценки направляющих косинусов угла прихода сигнала. Совместно с четырьмя упомянутыми антеннами используют одну, две и более приемные антенны, также размещенные вдоль перпендикулярных осей на концах дополнительных баз, соответствующих шкалам промежуточной точности пеленгации. С использованием указанных антенн выполняют аналогичные функции приема сигнала, измерения разностей фаз, преобразования разностей фаз в разности расстояний, раскрытия неоднозначности с помощью масштабных частот и преобразования разностей расстояний для каждой промежуточной базы в оценки направляющих косинусов. Результирующие оценки направляющих косинусов для осей размещения антенн определяют взвешенным суммированием оценок для шкал заданной и промежуточной точности с весами, равными отношению квадрата значения соответствующей базы к сумме квадратов значений всех баз, размещенных вдоль оси.
Технический результата состоит в повышении точности пеленгации излучающего объекта в фазовых многошкальных угломерных системах.
Заявляемое изобретение иллюстрируют следующими графические материалы.
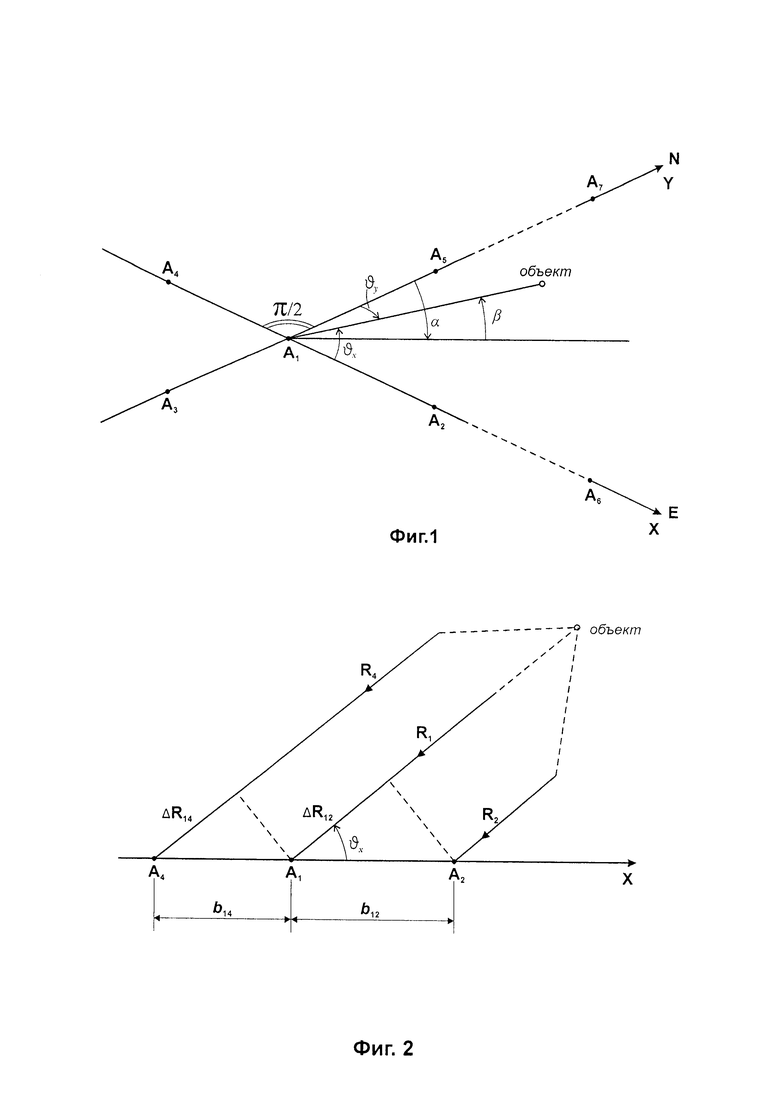
Фиг. 1. Пример размещения приемных антенн A1,…,А7 на поверхности Земли.
Примечания:
1. Оси X и Y направлены на восток Е и север N. Углы ϑх, ϑу и α, β являются соответственно направляющими углами и углами азимута и места излучающего объекта.
2. Сигнал приемной антенны А1 является опорным (опорная антенна) для сигналов, принимаемых антеннами А2,…,А7.
Фиг. 2. Схема формирования разностей дальностей ΔR12, ΔR14 на базах b12, b14, образованных антеннами A1, А2, А4.
Сущность заявляемого изобретения, математическое обоснование и последовательность операций, необходимых для его осуществления, заключаются в следующем.
На борт объекта устанавливают передающее устройство, выполняющее излучение с помощью ненаправленной (слабонаправленной) антенны высокочастотного гармонического сигнала (радиосигнала) несущей частоты f0, модулированного суммой гармонических колебаний масштабных частот. Возможен вариант переизлучения бортовым приемо-передатчиком объекта сигнала, излучаемого наземным передающим устройством угломерной системы. В этом случае обеспечивают разнесение несущих частот сигналов прямого и обратного каналов передачи.
Для удобства рассмотрения расставим масштабные частоты в ряд Fm1, Fm2, …, FmN в порядке возрастания значений: Fmi<Fmi+1, i=1,…,N-1. При этом наименьшая масштабная частота Fm1 с длиной волны λm1 обеспечивает раскрытие неоднозначности определения разностей расстояний до объекта для всех баз (точных и меньших по размеру промежуточных) антенного поля системы (пример антенного поля см. на фиг. 1), т.е. является грубой шкалой, удовлетворяющей условию: λг=λm1≥2 bт, где bт - точная база. Наибольшая частота FmN с диной волны λmN образует точную шкалу, обеспечивающую заданную точность определения угловых координат на базе bт и достижимую точность пеленгации на промежуточных базах. В качестве частоты FmN используют несущую частоту f0 (с наименьшей длиной волны λ0=λmN) как наибольшую по частоте гармонику в спектре излучаемого сигнала.
Поступим аналогично с измерительными базами, расставив их для каждой из осей X, Y (фиг. 1) в ряд b1, b2, …, bM: bj<bj+1, j=l,...,M-1. База bM является наибольшей по размеру точной базой: bM=bT, база b1 - наименьшей базой. Базы могут строиться как результат реального размещения антенн на заданном расстоянии друг от друга (с соответствующими реальными разностями дальностей до объекта), так и как составные «искусственные» базы, формируемые суммированием (вычитанием) двух соседних баз с показаниями в виде сумм (разностей) разностей дальностей, отсчитываемых по двум базам.
Проиллюстрируем сказанное примером (фиг. 2). Базы b12, b14, образованные размещением на местности антенн А1, А2, А4, обеспечивают измерение реальных разностей фаз Δϕ12, Δϕ14, преобразование которых дает разности расстояний ΔR12, ΔR14. В то же время суммирование разностей фаз Δϕ12, Δϕ14 равносильно «искусственному» измерению разности фаз Δϕ24, что в свою очередь дает разность расстояний ΔR24=ΔR12+ΔR14 на базе b24=b12+b14. Аналогично разность разностей фаз Δϕ12, Δϕ14 дает «искусственную» разность расстояний ΔR12 - ΔR14 на базе b12 - b14. Вводя обозначения b1=b12-b14, b2=b14, b3=b12, b4=b12+b14, составим ряд b1, b2, b3, b4, которому соответствует последовательность оценок направляющего косинуса ux=cos ϑx:

Оценки  представляют собой сумму:
представляют собой сумму:

истинного (естественно, неизвестного) значения направляющего косинуса ux и случайных погрешностей ε.
Важно отметить, что в реальной аппаратуре применительно к рассмотренному примеру измерение четырех указанных разностей фаз выполняют четыре независимых канала приема и обработки сигналов со своим фазометром каждый. Поэтому случайные погрешности е можно считать статистически независимыми.
Возвращаясь к общему случаю, продолжим рассмотрение последовательности необходимых операций.
Обработку сигналов, поступающих от антенн, осуществляют в приемо-регистрирующем центре угломерной системы, связанном с антеннами высокочастотными стабильными линиями связи. Передачу сигналов от антенн в центр выполняют на пониженной промежуточной частоте, обеспечивающей минимальное затухание сигналов в линии. При обработке по принятым сигналам с использованием всех N масштабных частот для каждой из М реальных и «искусственных» баз по обеим осям X, Y проводят расчет однозначных значений М разностей дальностей до объекта с последующим переходом к оценкам направляющих косинусов  . В результате формируют два массива оценок (назовем их первичными оценками):
. В результате формируют два массива оценок (назовем их первичными оценками):

(считается, что оси X, Y включают одинаковое число баз М), каждая из которых содержит случайную погрешность εхl, εyl, определяемую размером l-ой базы и случайной погрешностью фазометра εϕl.
Фазометры, используемые при обработке сигналов, имеют идентичное исполнение и одинаковые технические параметры, поэтому можно считать, что их случайные погрешности характеризуются одинаковой среднеквадратической погрешностью σϕ измерения разностей фаз.
Далее для краткости ограничимся рассмотрением операций определения результирующей оценки  направляющего косинуса для оси X. Результаты для оси Y аналогичны.
направляющего косинуса для оси X. Результаты для оси Y аналогичны.
В этих условиях для среднеквадратических погрешностей (СКП) первичных оценок  можно записать:
можно записать:

Заметим, что СКП σxl является статистической характеристикой случайных погрешностей εxl в (1).
Введем в рассмотрение относительный коэффициент kl=bм/bl. Очевидно, что для всех значений баз bl из рассматриваемого ряда коэффициент kl ≥ 1, при этом максимальное значение kl приобретает при bl=b1 (минимальная из имеющихся баз) и равен единице при bl=bм.
Тогда для СКП (2) можно записать:

где σхм - минимальная СКП первичной оценки  соответствующей наибольшей по размеру точной базе bT=bM.
соответствующей наибольшей по размеру точной базе bT=bM.
Массив первичных оценок  (1) представляет собой статистическую выборку неравноточных отсчетов ограниченного объема М, обработка которой методом наименьших квадратов (МНК) позволяет получить оценку
(1) представляет собой статистическую выборку неравноточных отсчетов ограниченного объема М, обработка которой методом наименьших квадратов (МНК) позволяет получить оценку  неизвестного ux более точную, чем отдельные оценки
неизвестного ux более точную, чем отдельные оценки 
Представим массив (1) в векторной форме:
где  - вектор-столбец,
- вектор-столбец,  ,
,
 - вектор-столбец,
- вектор-столбец,  ,
,
 - вектор-столбец,
- вектор-столбец,  .
.
Корреляционная (МхМ)-матрица (матрица дисперсий) вектора случайных погрешностей  равна:
равна:
С учетом формулы (3) матрицу  можно переписать так:
можно переписать так:
Тогда, используя известную [4] процедуру метода наименьших квадратов, для результирующей МНК-оценки  получим:
получим:

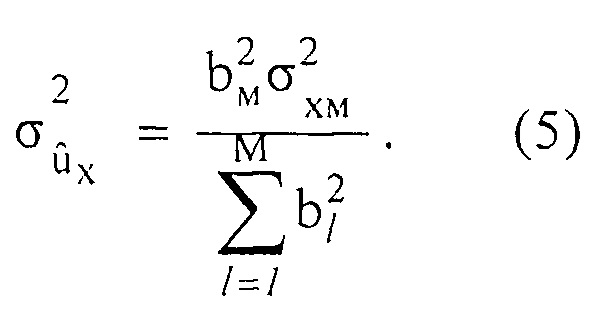
При этом дисперсия ошибки оценки  равна:
равна:
После несложных векторно-матричных преобразований приходим к соотношениям:
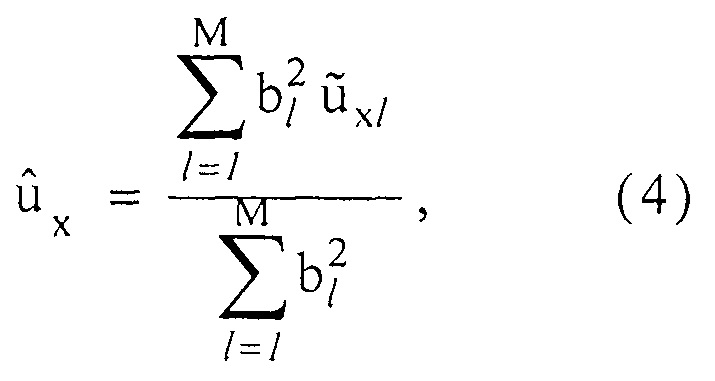
Таким образом, заключительная операция определения результирующей оценки  направляющего косинуса для оси X в соответствии с соотношением (4) состоит во взвешенном суммировании оценок
направляющего косинуса для оси X в соответствии с соотношением (4) состоит во взвешенном суммировании оценок  с весами, равными отношению квадрата значения соответствующей базы
с весами, равными отношению квадрата значения соответствующей базы  к сумме квадратов значений всех баз
к сумме квадратов значений всех баз  , размещенных вдоль оси.
, размещенных вдоль оси.
Для сравнения точностей предлагаемого способа и способа прототипа, показателем точности которого является СКП σхм, от дисперсии (5) перейдем к СКП  :
:

Из (6) видно, что сравнительная точность предлагаемого способа тем выше (величина  тем меньше по сравнению с σхм), чем больше число и размеры дополнительных промежуточных баз b1, b2, …, bM-1.
тем меньше по сравнению с σхм), чем больше число и размеры дополнительных промежуточных баз b1, b2, …, bM-1.
Аналогичные соотношения и заключительная операция справедливы для оси Y.
Существенные отличительные признаки заявляемого изобретения по сравнению с прототипом заключаются в следующем.
1. Использование на каждой из двух взаимно перпендикулярных осей трех и более приемных антенн, образующих две и более измерительные базы, соответствующие шкалам первоначально заданной и промежуточных точностей пеленгации, позволяет по каждой оси сформировать выборку первичных оценок направляющего косинуса, обработка которой методом наименьших квадратов дает результирующую оценку, превосходящую по точности отдельные первоначальные оценки, в том числе оценку заданной точности.
В прототипе две антенны на каждой оси образуют одну измерительную базу, соответствующую шкале заданной точности.
2. Результирующие оценки направляющих косинусов для осей размещения антенн определяют взвешенным суммированием оценок для шкал заданной и промежуточных точностей с весами, равными отношению квадрата значения соответствующей базы к сумме квадратов значений всех баз, размещенных вдоль оси.
В прототипе такая операция отсутствует.
Эффективность оценки  проиллюстрируем следующим числовым примером. Обратимся снова к системе из трех антенн на фиг. 2. Такая антенная система характерна, например, для усеченного (исторически первого) варианта комплекса «Вега». Значения баз примем равными b12=70 м, b14=60 м, что сопоставимо с размерами реальной антенной системы. Тогда b1=10 м, b2=60 м, b3=70 м, b4=130 м. Подставив эти значения в (6):
проиллюстрируем следующим числовым примером. Обратимся снова к системе из трех антенн на фиг. 2. Такая антенная система характерна, например, для усеченного (исторически первого) варианта комплекса «Вега». Значения баз примем равными b12=70 м, b14=60 м, что сопоставимо с размерами реальной антенной системы. Тогда b1=10 м, b2=60 м, b3=70 м, b4=130 м. Подставив эти значения в (6):
получим  т.е. выигрыш в точности составляет 19%.
т.е. выигрыш в точности составляет 19%.
Более заметным повышение точности является для варианта «Вега-Атлас» с дополнительной приемной антенной А6 (фиг. 1), для которой b16=b5=600 м, b6=b14+b16=660 м:  т.е. выигрыш равен 27%. Для рассматриваемых в качестве примера прецизионных систем типа «Вега», погрешности определения направляющих косинусов которых в пересчете в угловую меру исчисляются единицами угловых секунд и при совершенствовании важна каждая угловая секунда, такое повышение точности представляется значимым.
т.е. выигрыш равен 27%. Для рассматриваемых в качестве примера прецизионных систем типа «Вега», погрешности определения направляющих косинусов которых в пересчете в угловую меру исчисляются единицами угловых секунд и при совершенствовании важна каждая угловая секунда, такое повышение точности представляется значимым.
На практике целесообразно применение остронаправленных приемных антенн A1, А2, … (фиг. 1), обеспечивающих угловое сопровождение движущегося излучающего объекта. Этим достигается большая дальность действия, высокие пространственная селекция и помехозащищенность, а также возможность устранения неоднозначности в пределах диаграммы направленности. Для этого в состав антенного поля включают ведущий следящий пеленгатор (например, амплитудный суммарно-разностный) с азимутально-угломестной подвеской (на фиг. 1 не показан), управляющий наведением сопровождающих объект ведомых приемных антенн. Кроме того, показания пеленгатора - текущие углы азимута α и места β, пересчитанные в направляющие косинусы:
uX=sinαcosβ, uY=cosαcosβ,
могут служить первой грубой масштабной шкалой.
Реализация заявляемого изобретения не вызывает сложности, поскольку для этого могут применяться аппаратно-программные средства разнесенного приема и централизованной обработки сигналов, например, систем типа «Вега», либо технические решения, предложенные в способе [6]. При этом в первом случае требуется лишь небольшая доработка используемой сигнально-кодовой конструкции, поскольку в ней изначально присутствуют модулирующие масштабные частоты, необходимые для дальномерного канала. Предлагаемый же несложный алгоритм весового суммирования первичных оценок направляющих косинусов легко реализуется вычислительными средствами приемо-регистрирующего центра.
Таким образом, заявляемое изобретение может быть реализовано и обеспечивает повышение точности определения угловых координат излучающего объекта в фазовых многошкальных угломерных системах.
Источники информации:
1. Патент RU 2290658.
2. Патент RU 2427853.
3. Космические траекторные измерения. Радиотехнические методы измерений и математическая обработка данных/П.А. Агаджанов, Н.М. Барабанов, Н.И. Буренин и др.; Под. ред. Агаджанова П.А., Дулевича В.Е., Коростелева А.А. - Изд. «Советское радио», 1969.
4. Основы радионавигационных измерений/В.А. Губин, А.А. Костылев, М.Г. Степанов и др.; Под ред. Клюева Н.Ф. - МО СССР, 1987.
5. Вопросы приема и обработки сигналов в измерительных каналах навигационных и геодезических систем/Н.Ф. Клюев, М.Г. Степанов, Е.А. Ткачев, В.Ф. Фатеев. - ВИККА им. А.Ф. Можайского, 1995.
6. Патент RU 2603971.
7. Измерительные системы космодромов Вега. - Режим доступа: https://oborud.jofo.mе/2139190.html.
8. Измерительные системы космодромов. - Режим доступа: https://topwar.ru/166664-ne-publikovat-foto-izmeritelnye-sistemy-kosmodromov.html.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ В ФАЗОВЫХ МНОГОШКАЛЬНЫХ УГЛОМЕРНЫХ СИСТЕМАХ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2015 |
|
RU2603971C1 |
| СПОСОБ ФАЗОВОЙ ПЕЛЕНГАЦИИ | 2022 |
|
RU2787319C1 |
| Способ измерения параметров движения летательного аппарата в фазовых угломерно-дальномерных системах и устройство его реализующее | 2016 |
|
RU2649411C1 |
| СПОСОБ АВТОНОМНОГО МГНОВЕННОГО ОПРЕДЕЛЕНИЯ ПОЛЬЗОВАТЕЛЯМИ-АБОНЕНТАМИ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ, СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, УГЛОВОЙ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ И ПЕЛЕНГА ПО ФАЗЕ НЕСУЩЕЙ РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ, РЕТРАНСЛИРУЕМЫХ СПУТНИКАМИ | 2004 |
|
RU2286584C2 |
| ОДНОМЕРНЫЙ ШИРОКОДИАПАЗОННЫЙ ФАЗОВЫЙ ПЕЛЕНГАТОР НА ОСНОВЕ ИСКУССТВЕННОЙ НЕЙРОННОЙ СЕТИ | 2017 |
|
RU2679005C2 |
| Индикаторное устройство | 1991 |
|
SU1812430A1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ | 2006 |
|
RU2311656C1 |
| ФАЗОВОЕ МНОГОШКАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1993 |
|
RU2074398C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2014 |
|
RU2561003C1 |
| Способ определения взаимного положения объектов по сигналам глобальных навигационных спутниковых систем | 2016 |
|
RU2624268C1 |
Изобретение относится к пеленгаторам направления прихода электромагнитных, звуковых и других колебаний с использованием разнесенных антенн и фазового метода измерений и предназначено для преимущественного применения в системах радиолокации и радионавигации, определяющих параметры движения летательных аппаратов и других объектов. Технический результат - повышение точности пеленгации излучающего объекта. В заявленном способе используют совместно два типа масштабных шкал - шкалу масштабных баз и шкалу масштабных частот. Для этого вдоль двух взаимно перпендикулярных осей размещают по три и более приемные антенны, образующие две и более измерительные базы, соответствующие шкалам первоначально заданной и промежуточной точности пеленгации. Излучаемый сигнал, содержащий две и более масштабные частоты, при приеме подвергают обработке, заключающейся в измерении разностей фаз по всем масштабным частотам, преобразовании разностей фаз в разности расстояний от объекта до пар приемных антенн, раскрытии неоднозначности определения разностей расстояний с помощью масштабных шкал, образованных масштабными частотами, и преобразовании разностей расстояний для заданной и промежуточных баз каждой из двух осей в оценки направляющих косинусов угла прихода сигнала. Результирующие оценки направляющих косинусов определяют взвешенным суммированием оценок для шкал заданной и промежуточной точности с весами, равными отношению квадрата значения соответствующей базы к сумме квадратов значений всех баз, размещенных вдоль оси. Полученные оценки превосходят по точности отдельные первоначальные оценки, в том числе оценку заданной точности. 2 ил.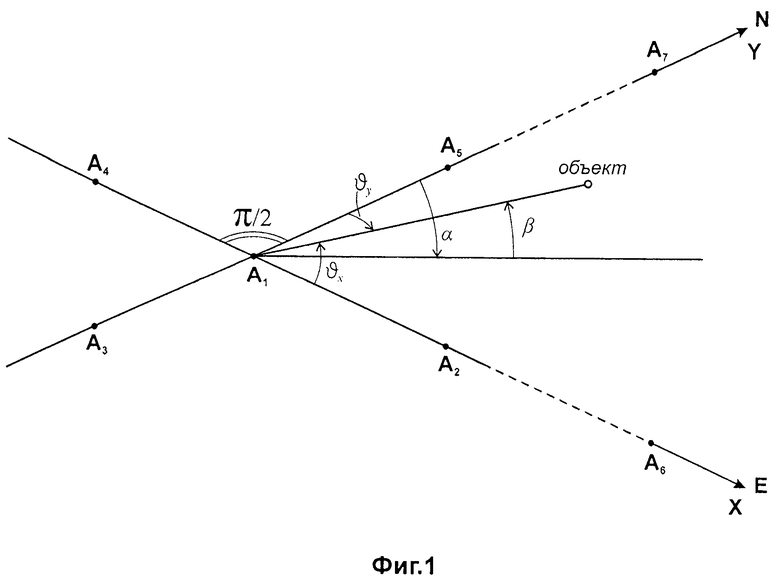
Способ пеленгации излучающего объекта в фазовых многошкальных угломерных системах, заключающийся в определении направляющих косинусов угла прихода излучаемого сигнала, содержащего две и более масштабные частоты, путем приема сигнала на четыре попарно размещенные по двум взаимно перпендикулярным осям наземные приемные антенны, расположенные на расстоянии базы, соответствующей шкале заданной точности пеленгации, измерения разностей фаз по всем масштабным частотам, преобразования разностей фаз в разности расстояний от объекта до пар приемных антенн, раскрытия неоднозначности определения разностей расстояний с помощью масштабных шкал, образованных масштабными частотами, и преобразования значений разностей расстояний для обеих баз в оценки направляющих косинусов угла прихода сигнала, отличающийся тем, что совместно с четырьмя упомянутыми антеннами используют одну, две и более приемные антенны, также размещенные вдоль перпендикулярных осей на концах дополнительных баз, соответствующих шкалам промежуточной точности пеленгации, с использованием указанных антенн выполняют аналогичные функции приема сигнала, измерения разностей фаз, преобразования разностей фаз в разности расстояний, раскрытия неоднозначности с помощью масштабных частот и преобразования разностей расстояний для каждой промежуточной базы в оценки направляющих косинусов, при этом результирующие оценки направляющих косинусов для осей размещения антенн определяют взвешенным суммированием оценок для шкал заданной и промежуточной точности с весами, равными отношению квадрата значения соответствующей базы к сумме квадратов значений всех баз, размещенных вдоль оси.
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ В ФАЗОВЫХ МНОГОШКАЛЬНЫХ УГЛОМЕРНЫХ СИСТЕМАХ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2015 |
|
RU2603971C1 |
| Способ измерения параметров движения летательного аппарата в фазовых угломерно-дальномерных системах и устройство его реализующее | 2016 |
|
RU2649411C1 |
| СПОСОБ ФАЗОВОЙ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР | 2018 |
|
RU2681942C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2175770C1 |
| RU 2014111599 A, 27.09.2015 | |||
| EP 1850147 A1, 31.10.2007 | |||
| DE 102012208153 A1, 21.11.2013 | |||
| KR 20150122967 A, 03.11.2015. | |||

