Изобретение относится к радиолокации, радионавигации и может быть использовано в радиотехнических комплексах, определяющих параметры движения контролируемых летательных аппаратов на основе фазового метода измерений.
Под параметрами движения летательных аппаратов обычно понимается вектор, включающий в себя составляющие координат и скоростей точки расположения летательных аппаратов и, возможно, другие параметры. При этом координаты указанной точки определяются как пересечение определенных линий и(или) поверхностей, называемых линиями и поверхностями положения. В угломерно-дальномерных системах координаты летательных аппаратов определяются как пересечение прямой линии, проходящей через точку расположения измерительной системы и точку расположения летательного аппарата, и сферы, центр которой совпадает с положением измерительной системы, а радиус равен дальности до летательного аппарата.
Таким образом, линия положения летательного аппарата в угломерно-дальномерных системах считается прямой линией, положение которой в пространстве определяется по одной точке, ей принадлежащей, и по двум углам, характеризующим ее направление относительно опорных осей используемой системы координат. Указанные два угла обычно называются пеленгами, а задача их измерения именуется пеленгацией. Одним из возможных методов пеленгации является фазовый метод, основанный на измерении разности фаз электромагнитного сигнала, излучаемого объектом излучения (летательным аппаратом), и принимаемого двумя или более пространственно-разнесенными антеннами измерительной системы.
Известны фазовые способы пеленгации и фазовые пеленгаторы (патенты РФ 2.003.131, 2.006.872, 2.010.258, 2.012.010, 2.134.429, 2.155.352, 2.175.770, 2.290.658, 2.296.432, 2.303.274, 2.311.656, 2.365.931, 2.427.853; патенты США 4.380.010, 7.084.812; патенты Великобритании 1.395.599, 1.598.325; патенты Германии 2.127.087, 2.710.955; Кинкулькин И.Е. и др. Фазовый метод определения координат. М.: Сов. Радио, 1979 и др.).
Известен «Фазовый способ пеленгации и фазовый пеленгатор для его осуществления» (патент РФ 2.427.853, G01S 3/46, 2010), основанный на том, что принимают сигналы, усиливают и ограничивают их по амплитуде, сравнивают сигналы, прошедшие два канала, по фазе, при этом сигнал одного из каналов предварительно сдвигают по фазе на 90°, устанавливают в азимутальной плоскости n приемных антенн по окружности радиусом d с возможностью их электронного вращения с угловой скоростью Ω вокруг приемной антенны, размещенной в центре окружности, коммутируют приемные антенны, размещенные по окружности, поочередно с частотой Ω, сигнал, принимаемый антенной, размещенной в центре окружности, преобразуют по частоте с использованием частоты гетеродина, выделяют напряжения промежуточной частоты и путем обработки этих сигналов определяют направление на объект излучения по азимуту и углу места.
Недостаток этого способа заключается в том, что для его реализации требуется большое количество антенн, расположенных по окружности в азимутальной плоскости.
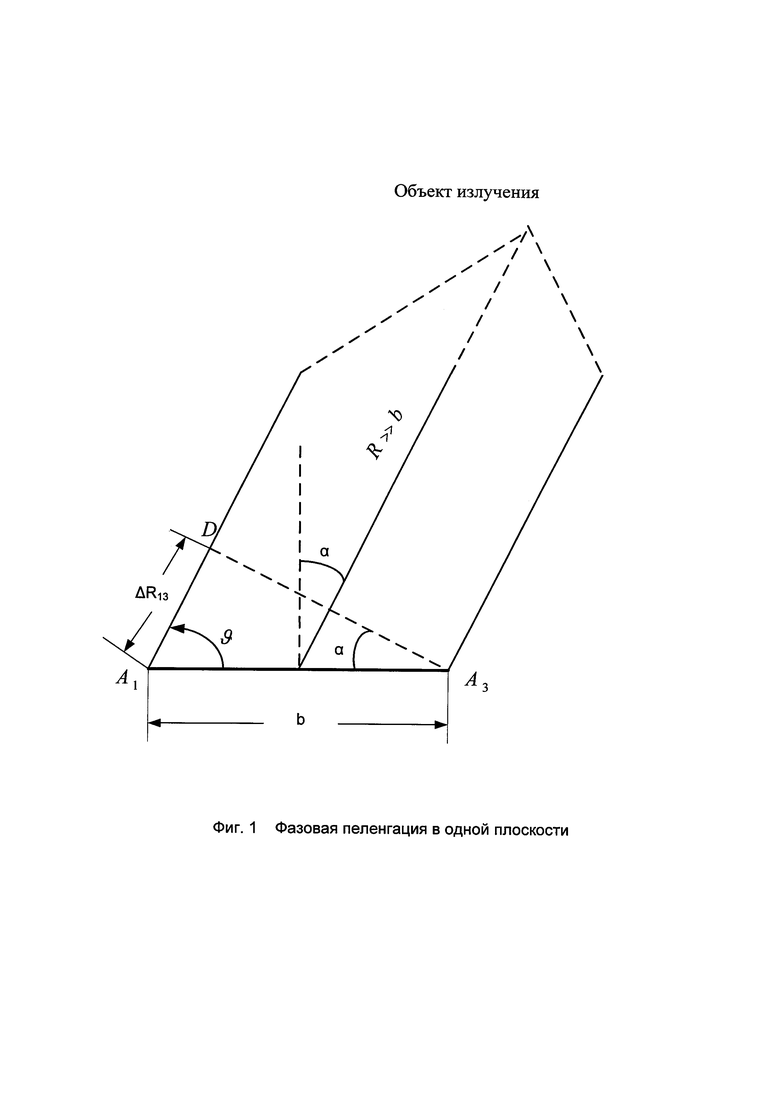
Известен способ измерения угловых координат движущихся объектов (пеленгации) фазовым методом, основанный на измерении разности фаз сигналов, принимаемых двумя антеннами, разнесенными в пространстве (Патент RU №2603971, опубл. 10.12.2016, Бюл. №34). Разность времен приема сигналов элементами антенн фиксируется как разность фаз этих сигналов. В этом способе измерение угловых координат удаленного объекта (R>>b) происходит следующим образом (Фиг. 1). Расстояние b между антеннами называется базой. Направление на объект определяется направляющим углом υ, отсчитываемым относительно базы, или углом α=π/2-υ, отсчитываемого относительно перпендикуляра к центру базы. Направление характеризуют также величиной
u=cosυ=sinα,
которая называется направляющим косинусом.
В результате разной длины хода сигналов ΔR=bsinα возникает разность времен их прихода
что дает на частоте f0 разность фаз

или

где с - скорость света.
При фиксированной погрешности фазометра заданная точность измерения угловой координаты обеспечивается выбором размера точной шкалы

который должен быть достаточно большим.
Для однозначного отсчета угловой координаты в диапазоне uмакс-uмин, при котором разность фаз не превышает 2π, размер базы грубой шкалы согласно формуле (2) выбирается следующим образом

При использовании ненаправленных или слабонаправленных антенн необходимо обеспечить однозначный отсчет угла в диапазоне - 1<u<1. Отсюда минимальный размер базы грубой шкалы

Поскольку разность фаз Δϕ пропорциональна направляющему косинусу угла прихода волны, определение направления фазовым методом сводится к измерению разности фаз.
В этом способе измерения угловых координат летательного аппарата для снижения количества антенн при определении угловых координат производят излучение с передатчика, расположенного на борту летательного аппарата нескольких (двух-трех и больше) масштабных частот Fm1, Fm2, Fm3 … образующих несколько масштабных шкал и осуществляют преобразование измеренного значения разности фаз каждого принятого сигнала в величину расстояния.
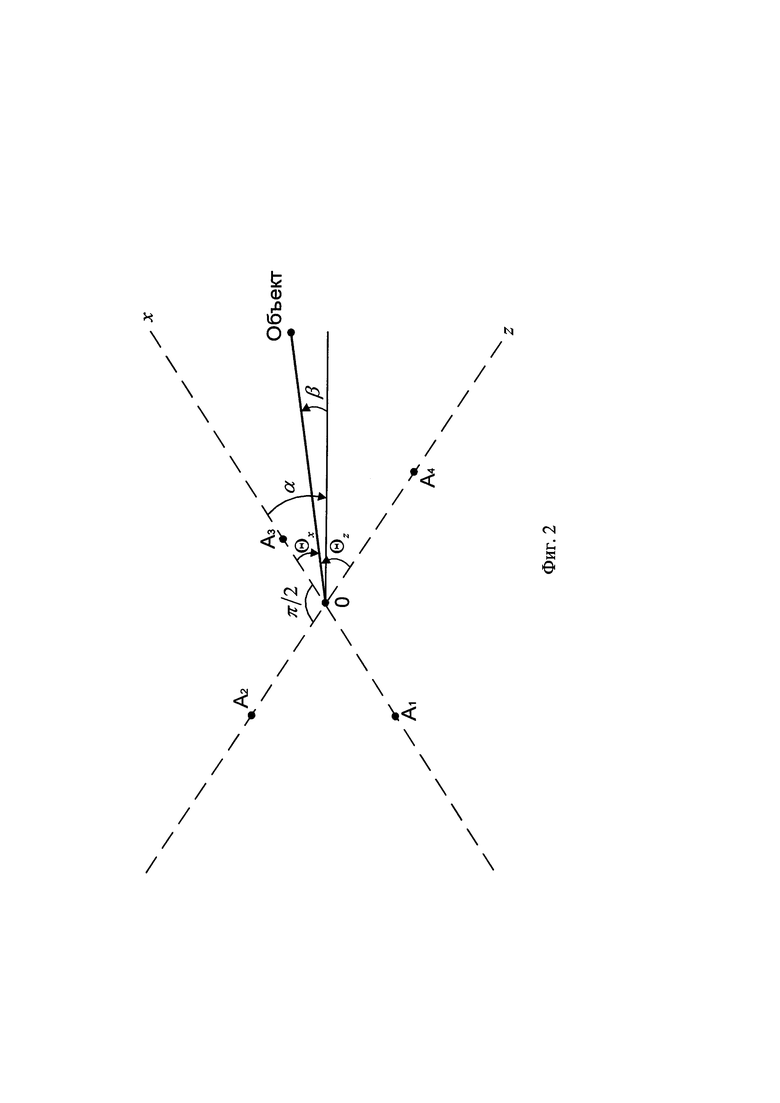
Таким образом, для определения азимута и угла места достаточно 4-х приемных антенн, расположенных на двух взаимно перпендикулярных базах. В некоторых случаях достаточно трех приемных антенн при использовании одной антенны для двух баз.
Линия положения, т.е. направление на объект в пространстве, образуется пересечением двух плоскостей (фиг. 2):
- плоскости, проходящей через линию, на которой находятся антенны A1 и А3 (ось х) и точку нахождения объекта. В этой плоскости измеряется cos θx.
- плоскости, проходящей через линию, на которой находятся антенны А2 и А4 (ось z) и точку нахождения объекта. В этой плоскости измеряется cos θz.
Величины косинусов направляющих углов cos θx и cos θz находятся по измеренной разности фаз δϕx и δϕz в каждой паре антенн (фиг. 2):

В этом случае линия положения, на которой находится объект, является прямой линией.
Для того чтобы определить положение объекта в пространстве обычно добавляют еще одно измерение, например дальность. Измеренная дальность образует поверхность положения - сферу. Пересечение сферы с линией положения дает точку. Координаты этой точки однозначно определяют положение объекта в пространстве.
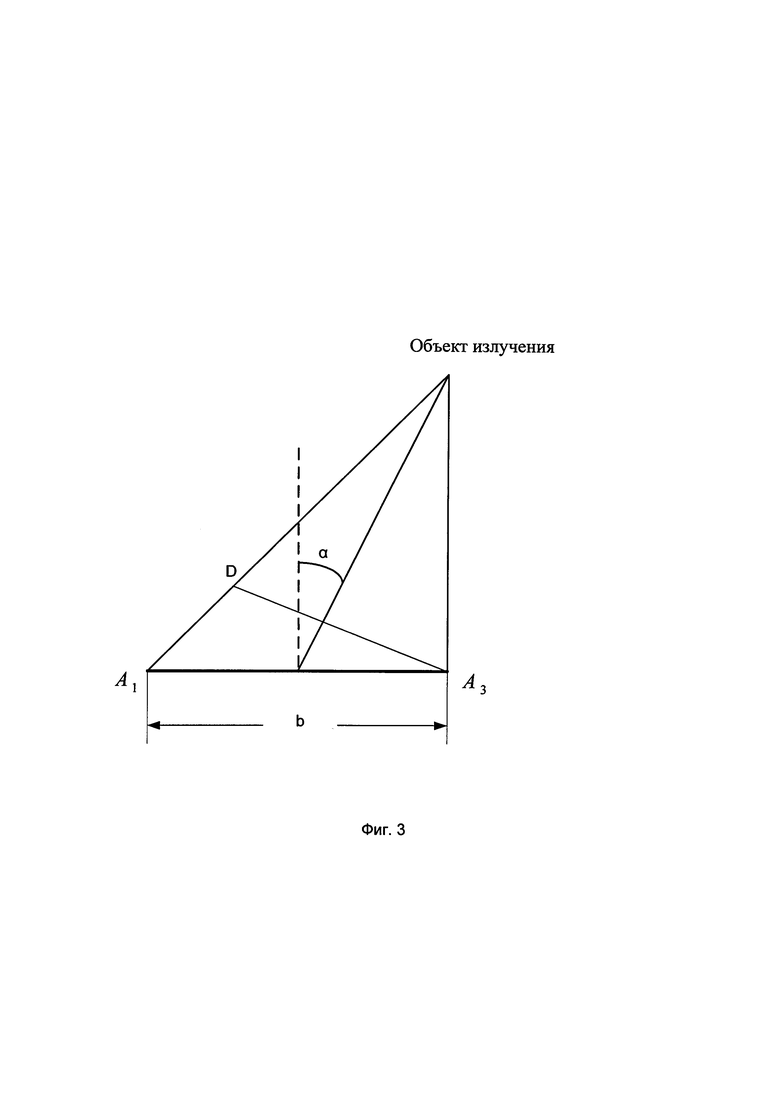
Недостатком этого способа является то, что точность измерения угла сохраняется только при том условии, что расстояние до объекта излучения много больше длины точной базы (расстояния между антеннами точной шкалы) потому, что при этом предполагают, что фронт прихода волны плоский и треугольник A1A3 D прямоугольный (Фиг. 1).
В случае, когда расстояние до объекта соизмеримо с базой А1А3, это предположение нарушается (фиг. 3) и формула ΔR=bsinα не является корректной.
Технический результат изобретения заключается в том, что точностные характеристики измерения параметров движения сохраняются при любых расстояниях до объекта, в том числе при условии, что расстояние до объекта излучения соизмеримо или меньше длины точной базы (расстояния между антеннами точной шкалы).
Предлагаемый способ измерения параметров движения в фазовых угломерных системах позволяет определять линию положения, на которой находится объект в пространстве, как линию пересечения двух гиперболоидов вращения.
Способ измерения параметров движения в фазовых угломерных системах, заключающийся в приеме сигнала от передатчика, расположенного на борту объекта излучения, на несколько пар приемных антенн, расположенных на наземном приемно-регистрирующем пункте, измерении разности фаз пришедших сигналов на каждую пару антенн, отличающийся тем, что измеренное значение разности фаз одной пары антенн преобразуют в поверхность положения, являющуюся гиперболоидом вращения относительно оси, образованной линией, соединяющей центры одной пары антенн, значение разности фаз другой пары антенн преобразуют в гиперболоид вращения относительно оси, образованной линией, соединяющей центры другой пары антенн, пересечение двух гиперболоидов вращения преобразуют в линию положения объекта излучения в пространстве, причем координаты объекта излучения определяются как пересечение указанной линии положения со сферой, определяемой по результатам измерения дальности до объекта излучения.
Такое преобразование фаз иллюстрируется рисунком Фиг. 4, на котором:
- Р - точка, на которой находится объект;
- d1 - расстояние от объекта Р до точки приема В1;
- d2 - расстояние от объекта Р до точки приема В2;
-  - разность расстояний от точки Р до В1 и В2 и соответственно, разность хода волны до точек приема (антенн) В1 и В2.
- разность расстояний от точки Р до В1 и В2 и соответственно, разность хода волны до точек приема (антенн) В1 и В2.
По определению: гипербола - это геометрическое место точек, абсолютная величина разности расстояний от которых до двух заданных точек, называемых фокусами, постоянна.
Таким образом, линия положения, на которой находится объект, является гиперболой, и это справедливо для любых расстояний до объекта, в том числе когда расстояние до объекта излучения соизмеримо или меньше длины точной базы (расстояния между антеннами точной шкалы).
Измеряемым параметром ΔR, как и в прототипе, является разность хода волны от источника излучения до двух антенн, расположенных на расстоянии, которое называется базой.
Зависимость направления на объект от разности хода волны от объекта до антенн A1 и А3 (ΔR13) определяется следующей формулой:

здесь: х, у, z - координаты объекта;
xA1, уА1, zA1 и хА3, уА3, zA3 - координаты антенн A1 и А3.
В пространстве - это поверхность положения, являющаяся гиперболоидом вращения относительно оси, образованной линией, соединяющей центры антенн A1 и А3 (фиг. 4).
Зависимость направления на объект от разности хода волны от объекта до антенн А2 и А4 (ΔR24) определяется следующей формулой:

здесь: х, у, z - координаты объекта;
xA2, yA2, zA2 и хА4, yA4, zA4 - координаты антенн А2 и А4.
В пространстве - это тоже поверхность положения, являющаяся гиперболоидом вращения относительно оси, образованной линией, соединяющей центры антенн А2 и А4
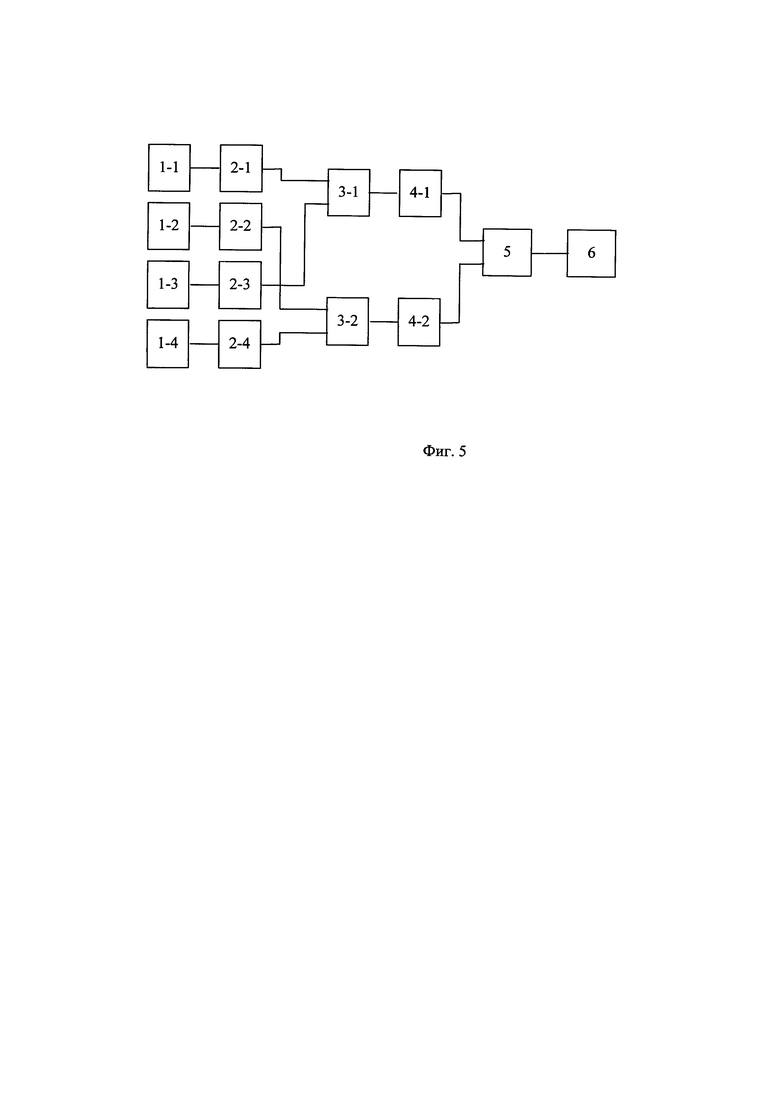
Пересечение этих двух гиперболоидов вращения определяет линию положения, на которой находится объект излучения, т.е. направление на объект. Для того чтобы определить координаты объекта в пространстве, необходимо добавить еще одно измерение, например дальность. Измеренная дальность образует поверхность положения - сферу. Пересечение сферы с линией положения дает точку. Координаты этой точки однозначно определяют положение объекта в пространстве. Устройство измерения параметров движения в фазовых угломерных системах (фиг. 5) для реализации способа измерения параметров движения летательных аппаратов в фазовых угломерно-дальномерных системах состоящее из:
- приемных антенн 1-1, 1-2, 1-3, 1-4;
- усилителей-ограничителей сигналов, принимаемых антеннами 2-1, 2-3, 2-2, 2-4;
- блоков фазовых детекторов 3-1, 3-2;
- устройств раскрытия неоднозначности 4-1, 4-2;
- устройства обработки разностей фаз принимаемых сигналов 5;
- выходного устройства результатов измерений 6.
Устройство измерения параметров движения в фазовых угломерных системах для реализации способа состоит из 4-х приемных антенн, 4-х усилителей-ограничителей сигналов, принимаемых антеннами, 2-х блоков фазовых детекторов, 2-х устройств раскрытия неоднозначности, устройства обработки разностей фаз принимаемых сигналов, выходного устройства результатов измерений, при этом выход антенны 1-1 соединен с входом усилителя-ограничителя 2-1 сигналов, принимаемых антенной 1-1, выход антенны 1-3 соединен с входом усилителя-ограничителя 2-3 сигналов, принимаемых антенной 1-3, выход антенны 1-2 соединен с входом усилителя-ограничителя 2-2 сигналов, принимаемых антенной 1-2, выход антенны 1-4 соединен с входом усилителя-ограничителя 2-4 сигналов, принимаемых антенной 1-4, выход усилителя-ограничителя 2-1 сигналов, принимаемых антенной 1-1, соединен с первым входом блока фазовых детекторов 3-1, выход усилителя-ограничителя 2-3 сигналов, принимаемых антенной 1-3, соединен со вторым входом блока фазовых детекторов 3-1, выход усилителя-ограничителя 2-2 сигналов, принимаемых антенной 1-2, соединен с первым входом блока фазовых детекторов 3-2, выход усилителя-ограничителя 2-4 сигналов, принимаемых антенной 1-4 соединен со вторым входом блока фазовых детекторов 3-2, выход блока фазовых детекторов 3-1 соединен с входом устройства раскрытия неоднозначности 4-1, выход блока фазовых детекторов 3-2 соединен с входом устройства раскрытия неоднозначности 4-2, выход устройства раскрытия неоднозначности 4-1 соединен с первым входом устройства обработки разности фаз принимаемых сигналов 5, выход устройства раскрытия неоднозначности 4-2 соединен со вторым входом устройства обработки разности фаз принимаемых сигналов 5, первый выход устройства обработки разностей фаз принимаемых сигналов 5 соединен с входом выходного устройства результатов измерений 6. Антенны 1-1, 1-3 и 1-2, 1-4 расположены на двух взаимно перпендикулярных базах. Сигналы от каждой пары антенн 1-1, 1-3 и 1-2, 1-4 через усилители-ограничители 2-1, 2-3, 2-2, 2-4 подают на блоки фазовых детекторов 3-1, 3-2 для измерения разности фаз сигналов, приходящих на каждую пару антенн 1-1, 1-3 и 1-2, 1-4, измеренные значения разности фаз подают на устройства раскрытия неоднозначности 4-1 и 4-2, с выходов устройств раскрытия неоднозначности 4-1 и 4-2 сигналы подают на устройство обработки разностей фаз принимаемых сигналов 5, которые затем поступают в выходное устройство результатов измерений 6 для расчета координат нахождения летательного аппарата в пространстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ В ФАЗОВЫХ МНОГОШКАЛЬНЫХ УГЛОМЕРНЫХ СИСТЕМАХ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2015 |
|
RU2603971C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЭПИЦЕНТРА ОЖИДАЕМОГО ЗЕМЛЕТРЯСЕНИЯ | 2009 |
|
RU2423730C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЭПИЦЕНТРА ОЖИДАЕМОГО ЗЕМЛЕТРЯСЕНИЯ | 2003 |
|
RU2248017C1 |
| ЛОКАЛЬНАЯ ФАЗОВАЯ РАЗНОСТНО-ДАЛЬНОМЕРНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2604652C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2008 |
|
RU2363614C1 |
| СПОСОБ ПЕЛЕНГАЦИИ ИЗЛУЧАЮЩЕГО ОБЪЕКТА В ФАЗОВЫХ МНОГОШКАЛЬНЫХ УГЛОМЕРНЫХ СИСТЕМАХ | 2022 |
|
RU2786495C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЭПИЦЕНТРА ОЖИДАЕМОГО ЗЕМЛЕТРЯСЕНИЯ | 2003 |
|
RU2243575C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2012 |
|
RU2519593C2 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2005 |
|
RU2282872C1 |
| ФАЗОРАЗНОСТНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА С ШИРОКОПОЛОСНЫМ СИГНАЛОМ | 2015 |
|
RU2602506C1 |

Изобретение относится к радиолокации, радионавигации и может быть использовано в радиотехнических комплексах, определяющих параметры движения летательных аппаратов на основе фазового метода измерений. Достигаемый технический результат – сохранение точностных характеристик измерения параметров движения при любых расстояниях до объекта, в том числе при условии, что расстояние до объекта излучения соизмеримо или меньше расстояния между антеннами точной шкалы. Способ измерения параметров движения в фазовых угломерных системах реализуется устройством, состоящим из четырех приемных антенн, четырех усилителей-ограничителей сигналов, принимаемых антеннами, двух блоков фазовых детекторов, двух устройств раскрытия неоднозначности, устройства обработки разностей фаз принимаемых сигналов, выходного устройства результатов измерений, и заключается в приеме сигнала от передатчика, расположенного на борту объекта излучения, на несколько пар приемных антенн, расположенных на наземном приемно-регистрирующем пункте, измерении разности фаз пришедших сигналов на каждую пару антенн, преобразовании измеренных разностей фаз в линию положения, которая представляет собой прямую линию, пересечение которой со сферой радиусом, равным дальности до объекта излучения, определяет текущее положение объекта излучения, при этом измеренное значение разности фаз одной пары антенн преобразуют в поверхность положения, являющуюся гиперболоидом вращения относительно оси, образованной линией, соединяющей центры одной пары антенн, значение разности фаз другой пары антенн преобразуют в гиперболоид вращения относительно оси, образованной линией, соединяющей центры другой пары антенн, пересечение двух гиперболоидов вращения преобразуют в линию положения объекта излучения в пространстве, причем координаты объекта излучения определяются как пересечение указанной линии положения со сферой, определяемой по результатам измерения дальности до объекта излучения. 2 н.п. ф-лы, 5 ил.
1. Способ измерения параметров движения в фазовых угломерных системах, заключающийся в приеме сигнала от передатчика объекта излучения, расположенного на борту летательного аппарата, на несколько пар приемных антенн, расположенных на наземном приемно-регистрирующем пункте, измерении разности фаз пришедших сигналов на каждую пару антенн, преобразовании измеренных разностей фаз в линию положения, которая представляет собой прямую линию, пересечение которой со сферой, имеющей радиус, равный дальности до объекта излучения, определяет текущее положение объекта излучения, отличающийся тем, что измеренное значение разности фаз одной пары антенн преобразуют в поверхность положения, являющуюся гиперболоидом вращения относительно оси, образованной линией, соединяющей центры одной пары антенн, значение разности фаз другой пары антенн преобразуют в гиперболоид вращения относительно оси, образованной линией, соединяющей центры другой пары антенн, пересечение двух гиперболоидов вращения преобразуют в линию положения объекта излучения в пространстве, причем координаты объекта излучения определяются как пересечение указанной линии положения со сферой, определяемой по результатам измерения дальности до объекта излучения.
2. Устройство измерения параметров движения в фазовых угломерных системах для реализации способа по п. 1, состоящее из четырех приемных антенн, четырех усилителей-ограничителей сигналов, принимаемых антеннами, двух блоков фазовых детекторов, двух устройств раскрытия неоднозначности, устройства обработки разностей фаз принимаемых сигналов, выходного устройства определения параметров движения объекта, при этом выход первой антенны соединен с входом первого усилителя-ограничителя сигналов, принимаемых первой антенной, выход третьей антенны соединен с входом третьего усилителя-ограничителя сигналов, принимаемых третьей антенной, выход второй антенны соединен с входом второго усилителя-ограничителя сигналов, принимаемых второй антенной, выход четвертой антенны соединен с входом четвертого усилителя-ограничителя сигналов, принимаемых четвертой антенной, выход первого усилителя-ограничителя сигналов, принимаемых первой антенной, соединен с первым входом первого блока фазовых детекторов, выход третьего усилителя-ограничителя сигналов, принимаемых третьей антенной, соединен со вторым входом первого блока фазовых детекторов, выход второго усилителя-ограничителя сигналов, принимаемых второй антенной, соединен с первым входом второго блока фазовых детекторов, выход четвертого усилителя-ограничителя сигналов, принимаемых четвертой антенной соединен со вторым входом второго блока фазовых детекторов, выход первого блока фазовых детекторов соединен с входом первого устройства раскрытия неоднозначности, выход второго блока фазовых детекторов соединен с входом второго устройства раскрытия неоднозначности, выход первого устройства раскрытия неоднозначности соединен с первым входом устройства обработки разности фаз принимаемых сигналов, выход второго устройства раскрытия неоднозначности соединен со вторым входом устройства обработки разности фаз принимаемых сигналов, выход устройства обработки разности фаз принимаемых сигналов соединен с входом выходного устройства результатов измерений.
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ В ФАЗОВЫХ МНОГОШКАЛЬНЫХ УГЛОМЕРНЫХ СИСТЕМАХ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2015 |
|
RU2603971C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518428C2 |
| ФАЗОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2457629C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2195683C2 |
| WO 1998029756 A1, 09.07.1998 | |||
| JP 2009300284 A, 24.12.2009 | |||
| US 6297762 B1, 02.10.2001. | |||

