Изобретение относится к радиолокации, радионавигации и может быть использовано в радиотехнических комплексах, определяющих параметры движения (ПД) контролируемых летательных аппаратов на основе фазового метода измерений.
Известны фазовые способы пеленгации и фазовые пеленгаторы (патенты РФ №2003131, №2006872, №2010258, №2012010, №2134429, №2155352, №2175770, №2290658, №2296432, №2303274, №2311656, №2365931, №2427853; патенты США №4380010, №7084812; патенты Великобритании №1395599, №1598325; патенты Германии №2127087, №2710955; Кинкулькин И.Е. и др. Фазовый метод определения координат. М.: Сов. Радио, 1979 и др.). Известен «Фазовый способ пеленгации и фазовый пеленгатор для его осуществления» (патент РФ №2427853, G01S 3/46, 2010), основанный на том, что принимают сигналы, усиливают и ограничивают их по амплитуде, сравнивают сигналы, прошедшие два канала, по фазе, при этом сигнал одного из каналов предварительно сдвигают по фазе на 90°, устанавливают в азимутальной плоскости n приемных антенн по окружности радиусом d с возможностью их электронного вращения с угловой скоростью Ω вокруг приемной антенны, размещенной в центре окружности, коммутируют приемные антенны, размещенные по окружности, поочередно с частотой Ω, сигнал, принимаемый антенной, размещенной в центре окружности, преобразуют по частоте с использованием частоты гетеродина, выделяют напряжения промежуточной частоты и путем обработки этих сигналов определяют направление на объект излучения по азимуту и углу места. Недостаток этого способа заключается в том, что для его реализации требуется большое количество антенн, расположенных по окружности в азимутальной плоскости.
Известен способ измерения угловых координат движущихся объектов (пеленгации) фазовым методом (1, 2), основанный на измерении разности фаз колебаний, принимаемых двумя антеннами, разнесенными в пространстве. Разность времен приема сигналов элементами антенн фиксируется как разность фаз этих сигналов.
Измерение угловых координат удаленного объекта (R>>b) происходит следующим образом (фиг. 1). Расстояние b между антеннами называется базой. Направление на объект определяется направляющим углом υ, отсчитываемым относительно базы, или углом α=π/2-υ, отсчитываемого относительно перпендикуляра к центру базы. Направление характеризуют также величиной
u=cosυ=sinα,
которая называется направляющим косинусом.
В результате разной длины хода сигналов ΔR=b sinα возникает разность времен их прихода
что дает на частоте f0 разность фаз

или

где с - скорость света.
Поскольку разность фаз Δφ пропорциональна направляющему косинусу угла прихода волны, определение направления фазовым методом сводится к измерению разности фаз.
Фазовая система, согласно формуле (2), тем чувствительнее к изменению угла, чем больше относительный размер базы b/λ. Однако с ростом b/λ уменьшается значение угловой координаты, при котором разность фаз превосходит значение 2π, т.е. наступает неоднозначность отсчета.
Исключение неоднозначности пеленгации фазовым методом достигается использованием нескольких антенн [3], расположенных вдоль одной линии на разных расстояниях, т.е. многошкальностью фиг. 2, где на фиг. 2а изображено расположение антенн, а на фиг. 2б раскрытие неоднозначности. Т.е. проводят измерения при различных отношениях b/λ. При этом меньшая база b образует грубую bг, но однозначную шкалу измерения угла, а большая база - точную, но неоднозначную шкалу отсчета. Соотношения между базами выбирают из условия: удвоенная максимальная погрешность измерения фазы по грубой шкале 2δφмакс не должна превышать интервала однозначности 2π точной шкалы измерения угла.
При фиксированной погрешности фазометра заданная точность измерения угловой координаты обеспечивается выбором размера точной шкалы

который должен быть достаточно большим.
Для однозначного отсчета угловой координаты в диапазоне uмакс-uмин, при котором разность фаз не превышает 2π, размер базы грубой шкалы согласно формуле (2) выбирается следующим образом

При использовании ненаправленных или слабонаправленных антенн необходимо обеспечить однозначный отсчет угла в диапазоне - 1<u<1. Отсюда минимальный размер базы грубой шкалы

Для измерения фазовым методом угловых координат и раскрытия неоднозначности используется большое количество пространственно-разнесенных антенн. Например (3), используется 36 антенн.
Недостатком такого метода является необходимость использования значительного числа пространственно-разнесенных антенн, связанных между собой высокостабильными каналами связи.
Для устранения вышеназванных недостатков предлагается способ измерения углов в фазовых многошкальных угломерных системах, заключающийся в приеме сигнала от передатчика, расположенного на борту летательного аппарата, на несколько пар приемных антенн, расположенных на наземном приемно-регистрирующем объекте, измерении разности фаз пришедших сигналов на каждую пару антенн и определении направляющего косинуса угла прихода волны, при этом излучают с борта летательного аппарата две и более масштабных частот, производят прием излученных масштабных частот на две пары приемных антенн, расположенных на расстоянии, соответствующем точной шкале измерения угла, и расположенных перпендикулярно друг к другу, производят измерение фаз по всем масштабным частотам, преобразуют измеренное значение фазы в величину расстояния, соответствующего задержке прихода волны на одну из пары антенн по каждой базе, где база - это расстояние между антеннами в одной паре, раскрывают неоднозначность измерения расстояния с помощью масштабных шкал, образованных масштабными частотами, последовательно начиная с грубой шкалы, преобразуют точное значение расстояния по каждой базе в направляющие косинусы угла прихода волны. Технический результат изобретения заключается в снижении количества антенн, для чего с борта объекта передают несколько масштабных частот, выполняющих условия (3) и (5). Таким образом, для определения азимута и угла места достаточно 4-х приемных антенн, расположенных на двух взаимно перпендикулярных базах. В некоторых случаях достаточно трех приемных антенн при использовании одной антенны для двух баз. Технический результат достигается тем, что при определении угловых координат производят излучение с борта летательного аппарата нескольких (двух-трех и больше) масштабных частот Fm1, Fm2, Fm3 образующих несколько масштабных шкал и осуществляют преобразование измеренного значения разности фаз каждого принятого сигнала в величину расстояния. На фиг. 1 это расстояние обозначено как ΔR. Масштабные частоты выбирают таким образом, чтобы длина волны грубой шкалы bг была приблизительно равна длине выбранной точной базы bт, а длина волны точной шкалы выбирается исходя из требуемой точности определения угловых координат.
Способ реализуется с помощью устройства, изображенного на фиг. 4, 5.
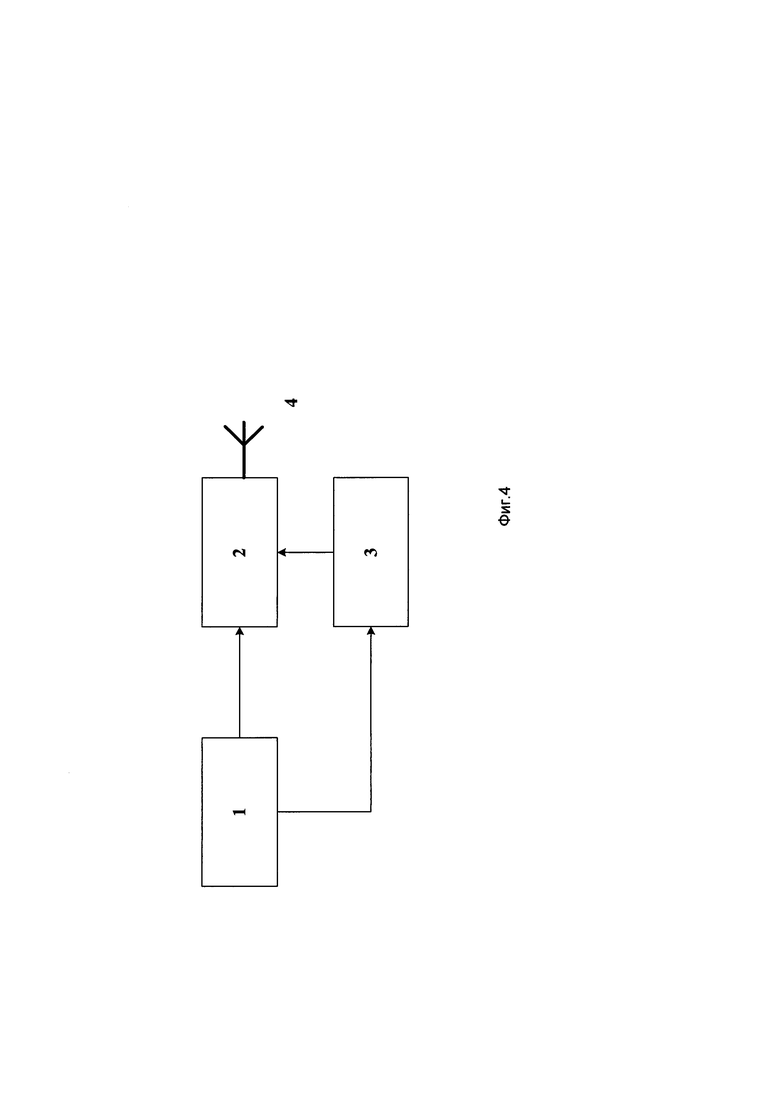
На фиг 4. изображена бортовая передающая аппаратура, где
- опорный генератор - 1;
- передающее устройство - 2: содержащее радиопередатчик (радиопередающее устройство) состоит из следующих конструктивных частей: задающий генератор частоты несущей волны, модулирующее устройство, изменяющее параметры излучаемой волны (амплитуду, частоту, фазу или несколько параметров одновременно) в соответствии с сигналом, который требуется передать, усилитель мощности, который увеличивает мощность сигнала до требуемой, устройство согласования, обеспечивающее максимально эффективную передачу мощности усилителя в антенну);
- формирователь масштабных частот - 3;
- передающая антенна - 4.
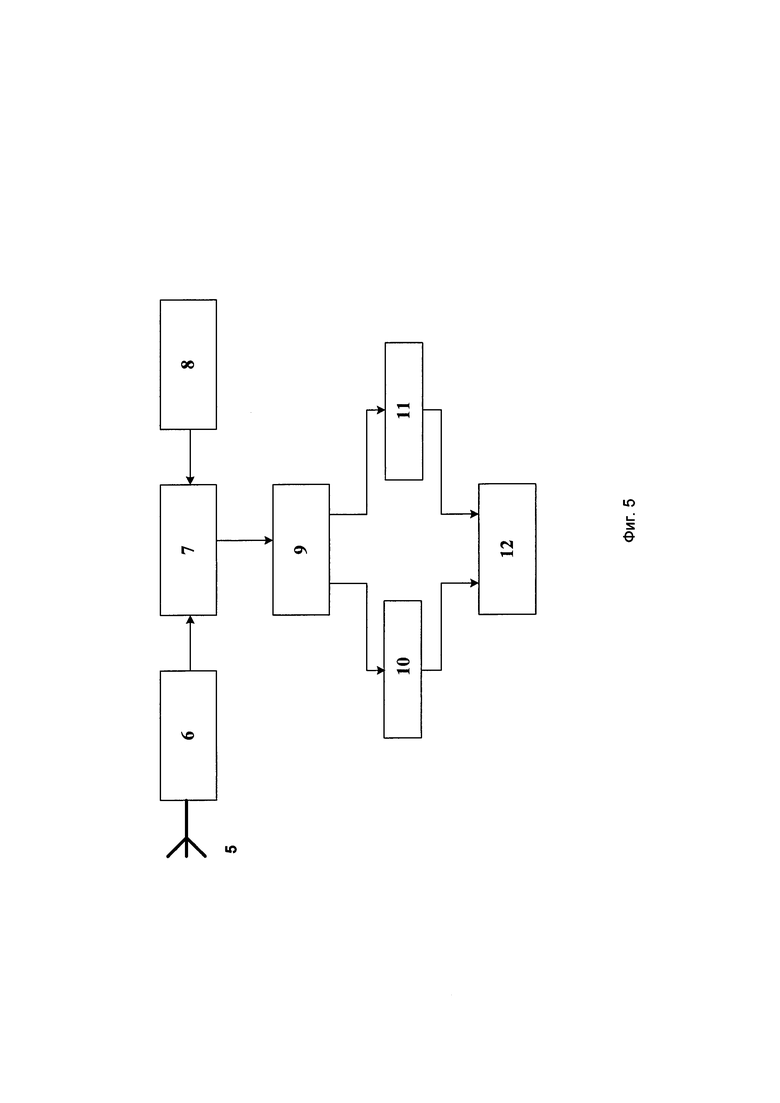
На фиг 5. изображена наземная приеморегистрирующая аппаратура, где
- приемные антенны - 5;
- многоканальное приемное устройство - 6: состоит из следующих конструктивных частей: усилителя принятых антенной, сигналов, преобразователя частоты, усилителя промежуточной частоты, детектора, преобразователя сигнала в вид, пригодный для использования;
- устройство выделения сигналов - 7;
- опорный генератор - 8;
- устройство разделения каналов - 9;
- устройство измерения направляющего косинуса cosθx - 10;
- устройство измерения направляющего косинуса cosθz -11;
- устройство отображения результатов обработки принятых сигналов - 12.
Устройство измерения углов в фазовых многошкальных угломерных системах состоит на летательном объекте из опорного генератора - 1, передающего устройства - 2, формирователя масштабных частот - 3, передающей антенны - 4 и на наземном приемно-регистрирующем объекте из приемных антенн - 5, многоканального приемного устройства - 6, устройства выделения сигналов - 7, опорного генератора - 8, устройства разделения каналов - 9, устройства измерения направляющего косинуса cosθх - 10, устройства измерения направляющего косинуса cosθz - 11 и устройства отображения результатов обработки принятых сигналов - 12, при этом на летательном объекте первый выход опорного генератора - 1 соединен с первым входом передающего устройства - 2, а второй выход опорного генератора - 1 соединен с первым входом формирователя масштабных частот - 3, первый выход формирователя масштабных частот - 3 соединен со вторым входом передающего устройства - 2, передающее устройство - 2 соединено с передающей антенной - 4, на наземном приемно-регистрирующем объекте приемное устройство - 6 соединено с приемными антеннами - 5, первый выход многоканального приемного устройства - 6 соединен с первым входом устройства выделения сигналов - 7, первый выход опорного генератора - 8 соединен со вторым входом устройства выделения сигналов - 7, первый выход устройства выделения сигналов - 7 соединен с первым входом устройства разделения каналов - 9, первый выход устройства разделения каналов - 9 соединен с первым входом устройства измерения cosθх - 10, второй выход устройства разделения каналов - 9 соединен с первым входом устройства измерения cosθz - 11, первый выход устройства измерения cosθх - 10 соединен с первым входом устройства отображения результатов обработки принятых сигналов - 12, первый выход устройства измерения cosθz - 11 соединен со вторым входом устройства отображения результатов обработки принятых сигналов - 12.
При решении поставленной задачи исходят из того, что ошибки измерения дальности на любой из нескольких масштабных шкал определяются ошибками оценки разности фаз - δiφ, где i - номер шкалы измерения:
где по условию δ1φ=δ2φ=…=δiφ=…δkφ и могут быть заданы среднеквадратической, максимальной или предельной ошибками измерения фаз соответственно.
Раскрытие неоднозначности величины ΔR производят последовательно, начиная с грубой шкалы b. Окончательную оценку величины ΔR получают по измерениям разности фаз точной шкалы b.
Точное значение величины ΔRT преобразуют в величину направляющего косинуса по формуле
Для определения направления на объект в пространстве (фиг. 3) т.е. для измерения азимута α и угла места β фазовый радиопеленгатор имеет две пары антенн с взаимно перпендикулярными базами, расположенными в горизонтальной плоскости.
Величины косинусов направляющих углов cosθx и cosθz находятся по измеренной разности фаз δφх и δφz в каждой паре антенн (фиг. 3):
 .
.
В этом случае направляющие косинусы связаны с угловыми координатами объекта азимутом α и углом места β следующими зависимостями (фиг. 3):
 .
.
Если база первой пары антенн совпадает с направлением север-юг, а вторая восток-запад, то угол α является истинным азимутом.
Устройство измерения углов в фазовых многошкальных угломерных системах состоит на летательном аппарате (фиг. 4) из опорного генератора - 1, передающего устройства - 2, формирователя масштабных частот - 3, передающей антенны - 4 и на наземной приемно-регистрирующей аппаратуре (фиг. 5) из приемных антенн - 5, многоканального приемного устройства - 6, устройства выделения сигналов - 7, опорного генератора - 8, устройства разделения каналов - 9, устройства измерения направляющего косинуса cosθx - 10, устройства измерения направляющего косинуса cosθz - 11 и устройства отображения результатов обработки принятых сигналов - 12. На борту летательного аппарата опорный генератор - 1 создает бортовую сетку частот, необходимых для создания несущей частоты и модулирующих частот. Формирователь масштабных частот - 3 создает сетку масштабных частот, необходимых для раскрытия неоднозначности измерения углов и работы измерительных каналов. Передающее устройство - 2 через передающую антенну - 4 излучает сформированный сигнал.
В наземной аппаратуре многоканальное приемное устройство - 6 и устройство выделения сигналов - 7 осуществляют прием сигналов от приемных антенн - 5. Опорный генератор - 8 создает сетку частот, достаточных для работы измерительных каналов. Устройство разделения каналов - 9 выделяет сигналы, приходящие от двух пар приемных антенн 1-3 и 2-4.
Выделенные сигналы поступают на канал измерения cosθx - 10 и на канал измерения cosθz - 11, которые производят измерение временных задержек по фазам несущей и модулирующих частот. Устройство отображения результатов обработки принятых сигналов - 12 производит обработку принятых сигналов и выдает угловые параметры движения летательного аппарата.
Литература
1. Под ред. Н.Ф. Клюева. Основы радионавигационных измерений, МО СССР, 1987, 429 с.
2. Под ред. П.А. Агаджанова, В.Г. Дулевича, А.А. Коростелева. Космические траекторные измерения. Радиотехнические методы измерений и математическая обработка данных, «Советское радио», 1969, 504 с.
3. Радиотехническая многопараметрическая система высокоточных измерений параметров траектории движущихся объектов «Вега-Н (К)». ОАО «АО НИИРИ», www.niiri.com.ua/Rus/rmsvi_nv.htm.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕЛЕНГАЦИИ ИЗЛУЧАЮЩЕГО ОБЪЕКТА В ФАЗОВЫХ МНОГОШКАЛЬНЫХ УГЛОМЕРНЫХ СИСТЕМАХ | 2022 |
|
RU2786495C1 |
| Способ измерения параметров движения летательного аппарата в фазовых угломерно-дальномерных системах и устройство его реализующее | 2016 |
|
RU2649411C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2014 |
|
RU2561003C1 |
| СПОСОБ ФАЗОВОЙ ПЕЛЕНГАЦИИ | 2022 |
|
RU2787319C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2021 |
|
RU2775155C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| ФАЗОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2582068C1 |
| ФАЗОВОЕ МНОГОШКАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1993 |
|
RU2074398C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСОВОГО УГЛА И КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ПО РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2110077C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2462690C1 |
Изобретение относится к радиолокации, радионавигации и может быть использовано в радиотехнических комплексах, определяющих параметры движения контролируемых летательных аппаратов на основе фазового метода измерений. Достигаемый технический результат - снижение количества антенн, используемых для определения азимута и угла места. Указанный результат достигается за счет того, что способ измерения углов в фазовых многошкальных угломерных системах заключается в приеме сигнала от передатчика, расположенного на борту летательного аппарата, на несколько пар приемных антенн, расположенных на наземном приемно-регистрирующем объекте, измерении разности фаз пришедших сигналов на каждую пару антенн и определении направляющего косинуса угла прихода волны, при этом излучают с борта летательного аппарата две и более масштабных частот, производят прием излученных масштабных частот на две пары приемных антенн, расположенных на расстоянии, соответствующем точной шкале измерения угла, и расположенных перпендикулярно друг к другу, производят измерение фаз по всем масштабным частотам, преобразуют измеренное значение фазы в величину расстояния, соответствующего задержке прихода волны на одну из антенн по каждой базе, где база - это расстояние между антеннами в одной паре, раскрывают неоднозначность измерения расстояния с помощью масштабных шкал, образованных масштабными частотами, последовательно начиная с грубой шкалы, преобразуют точное значение расстояния в направляющие косинусы угла прихода волны. 2 н.п. ф-лы, 5 ил.
1. Способ измерения углов в фазовых многошкальных угломерных системах, заключающийся в приеме сигнала от передатчика, расположенного на борту летательного аппарата, на несколько пар приемных антенн, расположенных на наземном приемно-регистрирующем объекте, измерении разности фаз пришедших сигналов на каждую пару антенн и определении направляющего косинуса угла прихода волны, отличающийся тем, что излучают с борта летательного аппарата две и более масштабных частот, производят прием излученных масштабных частот на две пары приемных антенн, расположенных на расстоянии, соответствующем точной шкале измерения угла, и расположенных перпендикулярно друг к другу, производят измерение фаз по всем масштабным частотам, преобразуют измеренное значение фазы в величину расстояния, соответствующего задержке прихода волны на одну из пары антенн по каждой базе, где база - это расстояние между антеннами в одной паре, раскрывают неоднозначность измерения расстояния с помощью масштабных шкал, образованных масштабными частотами, последовательно начиная с грубой шкалы, преобразуют точное значение расстояния по каждой базе в направляющие косинусы угла прихода волны.
2. Устройство измерения углов в фазовых многошкальных угломерных системах для реализации способа по п. 1, состоящее на летательном объекте из опорного генератора, передающего устройства, формирователя масштабных частот, передающей антенны и на наземном приемно-регистрирующем объекте из приемных антенн, приемного устройства, устройства выделения сигналов, опорного генератора, устройства разделения каналов, устройства измерения направляющего косинуса cos θx, устройства измерения направляющего косинуса cos θz и устройства отображения результатов обработки принятых сигналов, при этом на летательном объекте первый выход опорного генератора соединен с первым входом передающего устройства, а второй выход опорного генератора соединен с первым входом формирователя масштабных частот, первый выход формирователя масштабных частот соединен со вторым входом передающего устройства, передающее устройство соединено с передающей антенной, на наземном приемно-регистрирующем объекте приемное устройство соединено с приемными антеннами, первый выход приемного устройства соединен с первым входом устройства выделения сигналов, первый выход опорного генератора соединен со вторым входом устройства выделения сигналов, первый выход устройства выделения сигналов соединен с первым входом устройства разделения каналов, первый выход устройства разделения каналов соединен с первым входом устройства измерения cos θx, второй выход устройства разделения каналов соединен с первым входом устройства измерения cos θz, первый выход устройства измерения cos θx соединен с первым входом устройства отображения, первый выход устройства измерения cos θz соединен со вторым входом устройства отображения.
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2427853C1 |
| ФАЗОВЫЙ РАДИОПЕЛЕНГАТОР | 2009 |
|
RU2403582C1 |
| ФАЗОВЫЙ РАДИОПЕЛЕНГАТОР | 1998 |
|
RU2138061C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518428C2 |
| US 5724047 A, 30.01.1994 | |||
| JP 2004012362 A, 15.01.2004 | |||
| Защитные очки | 1988 |
|
SU1584943A1 |

