Изобретение относится к пеленгаторам источников излучения сигналов и предназначено для определения угловых координат летательных аппаратов и других объектов в системах радиолокации и радионавигации.
Известен фазовый метод пеленгации, способы и варианты осуществления которого в общем виде изложены в [1, 2]. Известен фазовый способ пеленгации [3], основанный на приеме сигналов на три разнесенные антенны, расположенные на одной линии, и измерении разностей фаз между сигналами, принимаемыми первой и второй, второй и третьей антеннами. Разность разностей фаз образует грубую однозначную шкалу отсчета, сумма разностей фаз - точную неоднозначную шкалу, а сами разности фаз выполняют роль промежуточных шкал. Для устранения неоднозначности используют известное правило согласования измерительных шкал. Недостатками способа являются невысокая точность определения угловых координат источников излучения и противоречивые требования к размерам промежуточных баз.
Наиболее близким по технической сущности к заявляемому изобретению (прототипом) является способ фазовой пеленгации [4], основанный на приеме сигналов на три антенны, разнесенные и расположенные на одной линии, при котором формируют две неравные измерительные базы d1 и d2,  - первой и второй, второй и третьей антеннами соответственно. (Заметим, что в заявляемом изобретении базы рассматриваются в порядке возрастания размеров, т.е. принято
- первой и второй, второй и третьей антеннами соответственно. (Заметим, что в заявляемом изобретении базы рассматриваются в порядке возрастания размеров, т.е. принято  что не меняет сущности изобретения). Измеряют разности фаз
что не меняет сущности изобретения). Измеряют разности фаз  между сигналами, принимаемыми первой и второй, второй и третьей антеннами соответственно, определяют величину разности разностей фаз
между сигналами, принимаемыми первой и второй, второй и третьей антеннами соответственно, определяют величину разности разностей фаз  с использованием которой формируют грубую, но однозначную шкалу отсчета углов, соответствующую малой измерительной базе
с использованием которой формируют грубую, но однозначную шкалу отсчета углов, соответствующую малой измерительной базе  . Дополнительно измеряют разность фаз
. Дополнительно измеряют разность фаз  между сигналами, принимаемыми первой и третьей антеннами, формируют с использованием разности фаз
между сигналами, принимаемыми первой и третьей антеннами, формируют с использованием разности фаз  точную, но неоднозначную шкалу отсчета углов, соответствующую большой измерительной базе
точную, но неоднозначную шкалу отсчета углов, соответствующую большой измерительной базе  Разность фаз
Разность фаз  используют для раскрытия неоднозначности фазовых измерений на базе d2, при условии выполнения неравенства
используют для раскрытия неоднозначности фазовых измерений на базе d2, при условии выполнения неравенства  где λ - длина волны. Разность фаз Δϕ2 на базе d2 используют для раскрытия неоднозначности фазовых измерений на базе d1, при условии выполнения неравенства
где λ - длина волны. Разность фаз Δϕ2 на базе d2 используют для раскрытия неоднозначности фазовых измерений на базе d1, при условии выполнения неравенства  Используют разность фаз Δϕ1 на базе d1 для раскрытия неоднозначности фазовых измерений на базе dT. Угол ϑ между направлением на источник излучения и линией, объединяющей разнесенные антенны, определяют по известной конечной формуле
Используют разность фаз Δϕ1 на базе d1 для раскрытия неоднозначности фазовых измерений на базе dT. Угол ϑ между направлением на источник излучения и линией, объединяющей разнесенные антенны, определяют по известной конечной формуле  Кроме того, согласование измерительных баз должно следовать стандартному правилу, накладываемому на удвоенную максимальную ошибку измерений на меньшей базе по отношению к интервалу однозначного измерения на большей базе (см., например, [1]).
Кроме того, согласование измерительных баз должно следовать стандартному правилу, накладываемому на удвоенную максимальную ошибку измерений на меньшей базе по отношению к интервалу однозначного измерения на большей базе (см., например, [1]).
Недостатком способа-прототипа является то, что при определении конечного результата ограничиваются только измерениями (разностью фаз Δϕс) на суммарной базе dT и не используют аналогичные измерения на базах dг, d1, d2 (однозначные разности фаз  ). Тем самым игнорируется имеющийся естественный запас повышения точности пеленгации. В качестве замечания можно указать на содержащееся в приведенных выше неравенствах требование одновременного выполнения взаимоисключающих условий
). Тем самым игнорируется имеющийся естественный запас повышения точности пеленгации. В качестве замечания можно указать на содержащееся в приведенных выше неравенствах требование одновременного выполнения взаимоисключающих условий 
Цель заявляемого изобретения состоит в разработке способа фазовой пеленгации источников излучения сигналов, обеспечивающего повышение точности определения угловых координат за счет совместной обработки результатов измерений по грубой (база dг), промежуточным (d1, d2) и точной (dT) шкалам.
Для достижения поставленной цели в способе фазовой пеленгации, основанном на приеме сигналов на три разнесенные антенны, расположенные на одной линии, при котором формируют три неравные измерительные базы  - первой и второй, второй и третьей, первой и третьей антеннами соответственно, измеряют разности фаз
- первой и второй, второй и третьей, первой и третьей антеннами соответственно, измеряют разности фаз  между сигналами, принимаемыми первой и второй, второй и третьей, первой и третьей антеннами соответственно. Определяют величину разности разностей фаз
между сигналами, принимаемыми первой и второй, второй и третьей, первой и третьей антеннами соответственно. Определяют величину разности разностей фаз  с использованием которой формируют грубую, но однозначную шкалу отсчета, соответствующую малой измерительной базе dг=d2-d1. С использованием разности фаз
с использованием которой формируют грубую, но однозначную шкалу отсчета, соответствующую малой измерительной базе dг=d2-d1. С использованием разности фаз  формируют точную, но неоднозначную шкалу отсчета, соответствующую большой измерительной базе
формируют точную, но неоднозначную шкалу отсчета, соответствующую большой измерительной базе  Разность
Разность  используют для раскрытия неоднозначности фазовых измерений на первой промежуточной шкале, соответствующей базе d1. Полученную однозначную разность фаз Δϕ1 на базе d1 используют для раскрытия неоднозначности на второй промежуточной шкале, соответствующей базе d2. Полученную однозначную разность фаз Δϕ2 используют для раскрытия неоднозначности фазовых измерений и получения однозначной разности фаз
используют для раскрытия неоднозначности фазовых измерений на первой промежуточной шкале, соответствующей базе d1. Полученную однозначную разность фаз Δϕ1 на базе d1 используют для раскрытия неоднозначности на второй промежуточной шкале, соответствующей базе d2. Полученную однозначную разность фаз Δϕ2 используют для раскрытия неоднозначности фазовых измерений и получения однозначной разности фаз  на базе dT. Далее разности фаз
на базе dT. Далее разности фаз  преобразуют в соответствующие значения направляющих косинусов
преобразуют в соответствующие значения направляющих косинусов 
 угла прихода сигнала Результирующее значение направляющего косинуса
угла прихода сигнала Результирующее значение направляющего косинуса  формируют путем взвешенного суммирования
формируют путем взвешенного суммирования  упомянутых значений направляющих косинусов с весами
упомянутых значений направляющих косинусов с весами  равными
равными 
 где
где 
 , при этом угол
, при этом угол  вычисляют по формуле
вычисляют по формуле 
Технический результат заключается в повышении точности пеленгации источников излучения сигналов.
Заявляемое изобретение иллюстрирует фиг.1 - схема размещения приемных антенн A1, А2, A3.
Рассмотрим сущность заявляемого изобретения, математическое обоснование и последовательность необходимых операций.
Сущность предлагаемого способа фазовой пеленгации состоит в максимально полном использовании имеющейся информации об угловом положении источника излучения путем оптимальной совместной обработки неравноточных (в силу разной длины баз) результатов измерений по всем базам.
Обработку сигналов, поступающих от антенн A1, А2, A3 (фиг.1) через приемники, фазометры и вычитатель, выполняют в вычислителе. При обработке полученные разности фаз  с помощью использованного ранее соотношения:
с помощью использованного ранее соотношения:

где  - упомянутые выше разности фаз, d - соответствующие базы, преобразуют в выборку значений направляющих косинусов
- упомянутые выше разности фаз, d - соответствующие базы, преобразуют в выборку значений направляющих косинусов  представляющих собой случайные величины - оценки неизвестного истинного значения и со среднеквадратическими погрешностями (СКП)
представляющих собой случайные величины - оценки неизвестного истинного значения и со среднеквадратическими погрешностями (СКП)  определяемыми СКП фазометров
определяемыми СКП фазометров  и длинами баз d:
и длинами баз d:

Далее для сокращения записи индекс «и» опустим. Полагая, что фазометры каналов приема сигналов и формирования разностей фаз имеют идентичные исполнение и параметры, можно считать, что их случайные погрешности независимы и характеризуются одинаковой СКП 
В соответствии с (1) СКП оценки uт равна:

Тогда для СКП оценок  можно записать:
можно записать:

Учитывая, что  представляет собой разность разностей фаз
представляет собой разность разностей фаз  т.е. является алгебраической суммой двух независимых случайных величин, для СКП оценки uг справедливо равенство:
т.е. является алгебраической суммой двух независимых случайных величин, для СКП оценки uг справедливо равенство:
Заметим, что СКП  является характеристикой точности способа-прототипа. Эту величину выберем в качестве сравнительной точки отсчета при анализе точности предлагаемого способа.
является характеристикой точности способа-прототипа. Эту величину выберем в качестве сравнительной точки отсчета при анализе точности предлагаемого способа.
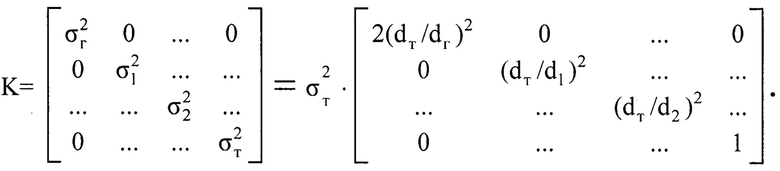
С учетом сказанного, корреляционная матрица статистической выборки  запишется так:
запишется так:
В этих условиях обработка выборки  методом наименьших (МНК) позволяет получить оптимальную в среднеквадратическом смысле (эффективную), несмещенную результирующую оценку
методом наименьших (МНК) позволяет получить оптимальную в среднеквадратическом смысле (эффективную), несмещенную результирующую оценку  направляющего косинуса, которая в соответствии с известной процедурой МНК [2] имеет вид:
направляющего косинуса, которая в соответствии с известной процедурой МНК [2] имеет вид:
где вектор-столбец 
Дисперсия ошибки МНК - оценки  равна:
равна:
После несложных преобразований получим:
Вводя обозначения 
 , эти соотношения можно записать в более компактной форме:
, эти соотношения можно записать в более компактной форме:

где 
Из (2) видно, что вклад в результирующую оценку  отдельных оценок
отдельных оценок  пропорционален квадрату длины соответствующей базы. При этом дисперсия
пропорционален квадрату длины соответствующей базы. При этом дисперсия  по сравнению с дисперсией
по сравнению с дисперсией  тем меньше (выигрыш в точности тем выше), чем больше размеры грубой и промежуточных баз (см. соотношение (3)).
тем меньше (выигрыш в точности тем выше), чем больше размеры грубой и промежуточных баз (см. соотношение (3)).
Важно отметить, что весовые коэффициенты  в операции взвешенного суммирования (4) рассчитывают заранее. При изменении геометрии антенной системы (например, из-за подвижек грунта, уходов фазовых центров антенн и других причин) они могут уточняться периодической юстировкой.
в операции взвешенного суммирования (4) рассчитывают заранее. При изменении геометрии антенной системы (например, из-за подвижек грунта, уходов фазовых центров антенн и других причин) они могут уточняться периодической юстировкой.
Завершающей является операция вычисления угла  по формуле
по формуле  . На практике при дальнейших определениях параметров траектории подвижных источников излучения и пространственного положения неподвижных излучателей преимущественное применение находят направляющие косинусы относительно двух взаимно перпендикулярных «антенных» осей X, Y (на фиг.1 ось Y не показана), либо углы азимута α и места β источника излучения, которые по полученным результирующим направляющим косинусам
. На практике при дальнейших определениях параметров траектории подвижных источников излучения и пространственного положения неподвижных излучателей преимущественное применение находят направляющие косинусы относительно двух взаимно перпендикулярных «антенных» осей X, Y (на фиг.1 ось Y не показана), либо углы азимута α и места β источника излучения, которые по полученным результирующим направляющим косинусам  ,
,  рассчитывают так:
рассчитывают так:
Существенные отличительные признаки заявляемого изобретения по сравнению с прототипом заключаются, во-первых, в преобразовании всех четырех однозначных разностей фаз  в соответствующие направляющие косинусы
в соответствующие направляющие косинусы  и, во-вторых, в операции их последующего весового суммирования по формуле (4), итогом чего является оптимальное результирующее значение
и, во-вторых, в операции их последующего весового суммирования по формуле (4), итогом чего является оптимальное результирующее значение  . В прототипе переход к направляющим косинусам не предусмотрен, а при формировании результата используется только одна разность фаз
. В прототипе переход к направляющим косинусам не предусмотрен, а при формировании результата используется только одна разность фаз  без какой-либо весовой обработки.
без какой-либо весовой обработки.
Приведем простой числовой пример эффективности заявляемого изобретения. Для прецизионных фазовых многошкальных пеленгаторов типовыми являются базы 
 Подставляя эти значения в (5), получим:
Подставляя эти значения в (5), получим:  , т.е. выигрыш в точности по величине СКП составляет 18%, что для рассматриваемых угломерных систем с уровнем точности, близким к потенциальному, является важным результатом.
, т.е. выигрыш в точности по величине СКП составляет 18%, что для рассматриваемых угломерных систем с уровнем точности, близким к потенциальному, является важным результатом.
Заявляемое изобретение легко реализуется с помощью фазового пеленгатора, структурная схема которого представлена на фиг.1 описания способа-прототипа [4]. Поскольку вычислитель схемы выполняет функции регистрации и пошагового согласования разностей фаз  от шкалы к шкале с формированием на каждом шаге их однозначных полных значений, он дополняется простыми вычислительными операциями перехода к направляющим косинусам и весового суммирования (4) с предварительно рассчитанными коэффициентами
от шкалы к шкале с формированием на каждом шаге их однозначных полных значений, он дополняется простыми вычислительными операциями перехода к направляющим косинусам и весового суммирования (4) с предварительно рассчитанными коэффициентами  .
.
Таким образом, заявляемый способ может быть реализован и обеспечивает повышение точности пеленгации источников излучения сигналов.
Источники информации
1. Космические траекторные измерения. Радиотехнические методы измерений и математическая обработка данных / П.А. Агаджанов, Н.М. Баранов, Н.И. Буренин и др.; Под ред. Агаджанова П.А., Дулевича В.Е., Коростелева А.А. - Изд. «Советское радио», 1969.
2. Основы радионавигационных измерений / В.А. Губин, А.А. Костылев, Б.Г. Мельников, М.Г. Степанов и др.; Под ред. Клюева Н.Ф. - МО СССР, 1987.
3. Патент RU 2311656.
4. Патент RU 2681942.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФАЗОВОЙ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР | 2018 |
|
RU2681942C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ | 2006 |
|
RU2311656C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2007 |
|
RU2346290C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2001 |
|
RU2189609C1 |
| СПОСОБ АВТОКОРРЕЛЯЦИОННОГО ПРИЕМА ШУМОПОДОБНЫХ СИГНАЛОВ | 2005 |
|
RU2296432C1 |
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 2006 |
|
RU2314644C1 |
| ПАНОРАМНЫЙ ПРИЕМНИК | 1992 |
|
RU2010245C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА ШИРОКОПОЛОСНЫХ СИГНАЛОВ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 1992 |
|
RU2010443C1 |
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 1991 |
|
RU2007046C1 |
| СПОСОБ ПЕЛЕНГАЦИИ ИЗЛУЧАЮЩЕГО ОБЪЕКТА В ФАЗОВЫХ МНОГОШКАЛЬНЫХ УГЛОМЕРНЫХ СИСТЕМАХ | 2022 |
|
RU2786495C1 |
Использование: изобретение относится к пеленгаторам источников излучения сигналов и предназначено для определения угловых координат летательных аппаратов и других объектов в системах радиолокации и радионавигации. Сущность: способ основан на измерении разностей фаз между сигналами, принимаемыми разнесенными антеннами, определении согласованных однозначных значений направляющих косинусов на грубой, промежуточных и точной шкалах (базах) и формировании результирующей оценки направляющего косинуса путем весового суммирования указанных значений. Технический результат: повышение точности пеленгации источников излучения. 1 ил.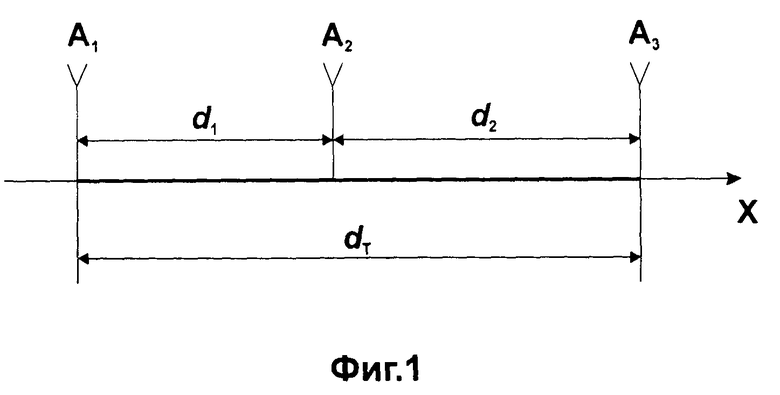
Способ фазовой пеленгации, основанный на приеме сигналов на три разнесенные антенны, расположенные на одной линии, при котором формируют три неравные измерительные базы d1, d2, dт - первой и второй, второй и третьей, первой и третьей антеннами соответственно, измеряют разности фаз Δϕ1, Δϕ2, Δϕт между сигналами, принимаемыми первой и второй, второй и третьей, первой и третьей антеннами соответственно, определяют величину разности разностей фаз Δϕг = Δϕ2 - Δϕ1, формируют с использованием разности Δϕг грубую, но однозначную шкалу отсчета, соответствующую малой измерительной базе dг = d2 - d1, формируют с использованием разности фаз Δϕт точную, но неоднозначную шкалу отсчета, соответствующую большой измерительной базе dт = d2 + d1, используют разность Δϕг для раскрытия неоднозначности фазовых измерений на первой промежуточной шкале, соответствующей базе d1, используют полученную однозначную разность фаз Δϕ1 на базе d1 для раскрытия неоднозначности фазовых измерений на второй промежуточной шкале, соответствующей базе d2, используют полученную однозначную разность фаз Δϕ2 на базе d2 для раскрытия неоднозначности фазовых измерений и получения однозначной разности фаз Δϕт на базе dт, отличающийся тем, что полученные разности фаз Δϕг, Δϕ1, Δϕ2, Δϕт преобразуют в соответствующие значения направляющих косинусов uг, u1, u2, uт угла прихода сигнала ϑ, результирующее значение направляющего косинуса up формируют путем взвешенного суммирования up=c1uг+c2u1+c3u2+с4uт упомянутых значений направляющих косинусов с весами ci, i = 1,…,4, равными с1=а1/а, с2=а2 /а, с3=а3 /а, с4=а4 /а, где 
 при этом угол ϑ вычисляют по формуле ϑ=arccos up.
при этом угол ϑ вычисляют по формуле ϑ=arccos up.
| СПОСОБ ФАЗОВОЙ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР | 2018 |
|
RU2681942C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ | 2006 |
|
RU2311656C1 |
| US 2020072960 A1, 05.03.2020 | |||
| JP 2017073672 A, 13.04.2017 | |||
| CN 112034417 A, 04.12.2020 | |||
| WO 2005116686 A2, 08.12.2005.. | |||

