ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к области обработки изображений, а конкретно - к способу оперативного обнаружения поверхностных дефектов кроненпробок на основе обработки изображений.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
В связи с быстрым развитием отрасли интеллектуального производства в Китае технологии машинного зрения и обработки изображений стали одними из основных средств обнаружения на заключительном этапе производственного процесса. Кроненпробки широко применяются в областях производства пива и газированных напитков в стеклянных бутылках, благодаря тому, что они обеспечивают хорошую герметичность. Согласно статистике, рыночный спрос на кроненпробки в Китае составил 47 миллиардов с 2008 года и увеличивался на 2 миллиарда в год, что значительным образом поспособствовало улучшению эффективности производства кроненпробок и обнаружения. Так как Китай является наибольшим в мире рынком по производству кроненпробок, улучшение обнаружения их дефектов является очень важным для развития всей отрасли производства кроненпробок в Китае.
С момента, как Соединенные Штаты выпустили первое оборудование для производства кроненпробок в 1981 году, вместе со стремительным ростом применения и производства кроненпробок другие страны взяли курс на улучшение технологии автоматического обнаружения для кроненпробок, и Китай добился определенных результатов в этой области.
Сиюань (2015) предложил алгоритм обнаружения для ПЭТ пробок на основе машинного зрения, более конкретно, могут обрабатываться 8 пробок в минуту, вероятность пропуска ниже 0,1%, а степень точности достигает 99%. Лю Вэй (2018) предложил способ обнаружения для зубцов юбки кроненпробок на основе алгоритма построения оболочек, однако этот способ обнаружения действует только в отношении внешних поверхностных дефектов. Чжоу Вэньцзюй (2014) предложил стратегию сопоставления и обнаружения дефектов кроненпробок при повороте на основе метода оценки небольшой выборки данных, однако в этом случае отсутствует возможность подробного анализа дефектов формы, таких как отсутствие резины или наличие облоя.
В CN 201110048984.7 раскрывается способ интеллектуального обнаружения для поверхностных дефектов на основе машинного зрения, однако он относится только к внешним поверхностным дефектам на кроненпробках. В CN 102192911 A раскрывается система и способ определения качества металлических бутылочных пробок на основе машинного зрения, однако этот способ применим только к одному дефекту металлической бутылочной пробки, и тип этого дефекта отличается от типа дефектов кроненпробок.
В итоге, к основными проблемам существующей схемы обнаружения дефектов кроненпробок можно отнести следующее: используемый на данный момент алгоритм анализа для кроненпробки имеет слабую самоадаптацию, и не может использоваться для специальных условий кроненпробки; существующий способ обнаружения действует только в отношении одного типа дефекта и не может обеспечить обнаружения всех дефектов на внутренней и внешней поверхностях кроненпробки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ:
Задача: целью настоящего изобретения является предоставление способа обнаружения дефектов на основе обработки изображений, по которому осуществляется обнаружение и классификация разных дефектов на поверхности используемой кроненпробки.
Техническое решение: Чтобы реализовать вышеуказанную цель, согласно настоящему изобретению предлагается следующее техническое решение:
способ оперативного обнаружения поверхностных дефектов кроненпробок на основе обработки изображений, включающий:
этап 1: получение изображения внутренней поверхности кроненпробки системой захвата изображений, и выполнение обработки полученного изображения методом Гауссовой фильтрации;
этап 2: выделение центрального участка на требуемом изображении методом пороговой сегментации и методом анализа характеристик области с компонентами связности, и подбор кругового контура на краевых пикселях контура участка методом подбора наименьших квадратов для выполнения центрального позиционирования внутренней поверхности кронепробки;
этап 3: предварительная настройка информации о физическом радиусе разных участков для разных типов кроненпробок согласно координатам центрального положения кроненпробки, полученным на этапе 2, и выполнение сегментации участка внутренней поверхности кроненпробки в сочетании с параметрами соотношения пикселей;
этап 4: выделение изображения на нужном участке внутренней поверхности по результату сегментации изображения на этапе 3, установка фиксированного порогового значения яркости для завершения сегментации изображения, и удаление участка шумов методом анализа характеристик области для выполнения обнаружения темных пятен на внутренней поверхности кроненпробки;
этап 5: выделение изображения на участках внутреннего и внешнего колец согласно результату сегментации изображения на этапе 3, завершение сегментации изображения за счет применения метода локального порога, и удаление участка шумов методом анализа характеристик области для выполнения обнаружения вздутий на участках внутреннего и внешнего колец на внутренней поверхности кроненпробки;
этап 6: получение контура края участка внешнего кольца полученного изображения методом фиксированной пороговой сегментации, выполнение кругового подбора на пикселях контура внешнего кольца методом наименьших квадратов, и сравнение отличий участка между участком контура внешнего кольца и участком подбора для выполнения обнаружения отсутствия резины;
этап 7: выделение изображения участка облоя по результату сегментации изображения на этапе 3, и выполнение обнаружения облоя и запаивания методом фиксированной пороговой сегментации и методом анализа характеристик области;
этап 8: выделение компоненты связности зубцов юбки по результату сегментации изображения на этапе 3, вычисление количества компонент связности, расчет внутреннего угла между компонентой связности и центром кроненпробки, и определение того, имеются ли дефекты на зубцах юбки по разнице внутреннего угла соседних зубцов юбки;
этап 9: получение изображения внешней поверхности стандартной кроненпробки, выполнение обработки полученного изображения методом Гауссовой фильтрации, и создание автономного шаблона характеристик согласно информации о характеристиках контура изображения;
этап 10: установка показателя совпадения с шаблоном, и обнаружение и позиционирование изображения, которое подвергается процедуре обнаружения, методом сопоставления характеристик с шаблоном после обработки методом Гауссовой фильтрации; и
этап 11: выполнение аффинного преобразования на целевом изображении по результату сопоставления с шаблоном на этапе 10, выполнение пороговой сегментации и сравнения участка на шаблонном и целевом изображениях соответственно, и выполнение обнаружения внешних поверхностных дефектов методом анализа характеристик области с компонентами связности.
Кроме того, на этапе 1 система захвата изображений включает промышленную камеру со строчно-кадровой разверткой, кольцевой источник освещения под малым углом и промышленный персональный компьютер; в промышленной камере со строчно-кадровой разверткой используется режим съемки, запускаемый датчиком, для завершения сбора данных.
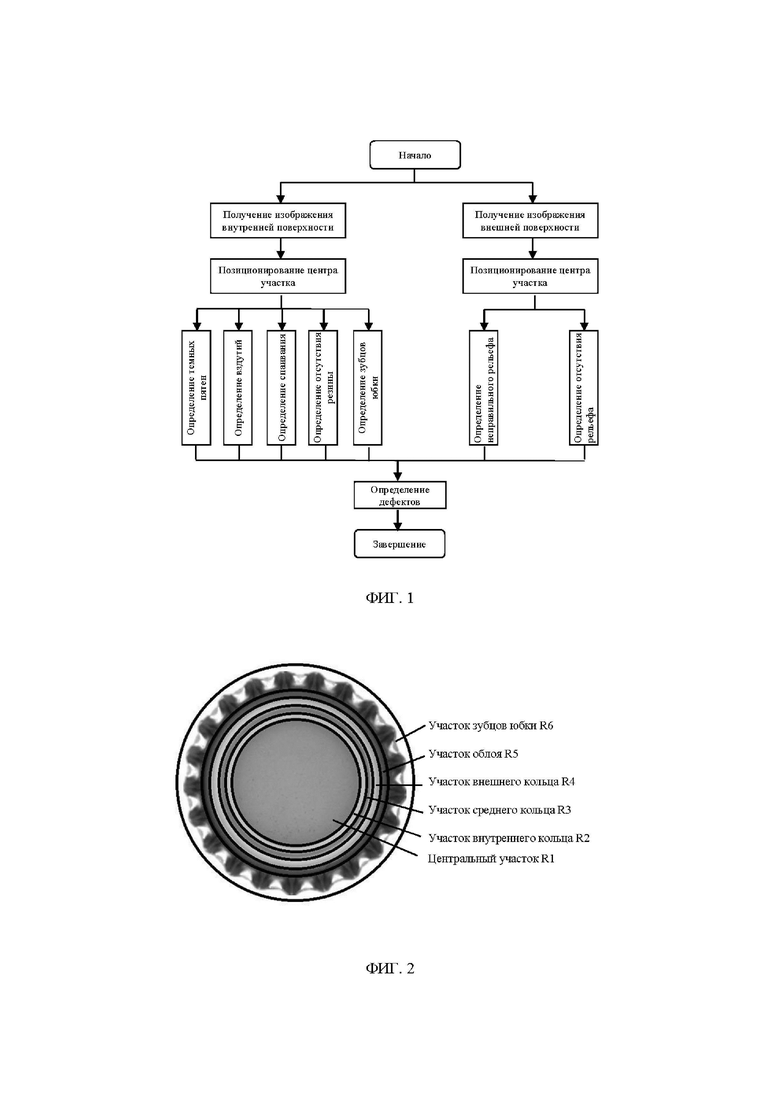
Кроме того, на этапах 2 и 3 внутренняя поверхность кроненпробки делится на центральный участок R1, участок внутреннего кольца R2, участок среднего кольца R3, участок внешнего кольца R4, участок облоя R5 и участок зубцов юбки R6, а способ центрального позиционирования участка R1 включает:
во-первых, выполнение пороговой сегментации на изображении на основе метода максимальной дисперсии между классами, установку размера изображения M×N и количества пикселей изображения со значениями яркости i на ni, после чего вероятность отличия уровней яркости будет  , выполнение бинаризации на изображении с помощью порогового значения яркости k для получения участков C1 и C2 со средними значениями u1 и u2, и вероятностями P1(k) и P2(k), после чего:
, выполнение бинаризации на изображении с помощью порогового значения яркости k для получения участков C1 и C2 со средними значениями u1 и u2, и вероятностями P1(k) и P2(k), после чего:
где 0<k<255, и среднее значение u всего изображения: 
целевая функция: 
выбор k, когда g(k) является максимальным пороговым значением сегментации по методу максимальной дисперсии между классами;
после чего установка компоненты связности с наибольшей областью выделения в качестве центрального участка, как показано в формуле (V):

где R представляет собой область участка, а именно, количество пикселей на участке, а gvalue представляет собой значение яркости; и
в завершение, выполнение кругового подбора на краевых пикселях участка методом наименьших квадратов, установка P(xi, yi) в качестве контурной точки, LRi в качестве расстояния от P(xi , yi) до подобранного круга, и N в качестве общего количества пикселей изображения, полученного по формуле (VI) для определения центра круга (a, b) и радиуса R подобранного круга, и получение центрального участка R1 согласно результату обнаружения;
выполнение сегментации участка внутренней поверхности кроненпробки включает: предварительную настройку информации о физическом радиусе разных участков согласно типам кроненпробок, получение информации о радиусе разных участков в пикселях с помощью параметров соотношения пикселей, и объединение с информацией о положении центрального участка.
Более того, на этапе 4 обнаружение темных пятен на внутренней поверхности кроненпробки включает: во-первых, сегментирование изображения методом фиксированного порогового значения, затем анализ компоненты связности после пороговой сегментации и, наконец, установку подходящего порогового значения участка для выполнения определения темных пятен.
Кроме того, на этапе 5 обнаружение вздутия на участке внутреннего кольца R2 и участке внешнего кольца R4 на внутренней поверхности кроненпробки включает:
во-первых, завершение сегментации изображения методом локального динамического порога для установки локального порогового значения представлено в виде формул (VII) и (VIII):

где a и b - среднее значение и коэффициент дисперсии соответственно, t - фиксированное значение и g(x, y) - выходное изображение; после пороговой сегментации - установку подходящего порогового значения области и фильтрацию участка шумовых помех с небольшой областью методом анализа характеристик области с компонентами связности для выполнения обнаружения вздутий.
Кроме того, на этапе 6 обнаружение отсутствия резины включает:
6.1) во-первых, выделение компоненты связности края внешнего кольца w1 методом пороговой сегментации и методом анализа характеристик области с компонентами связности;
6.2) после этого, подбор круга крайний круг участка внешнего кольца методом наименьших квадратов для получения экспоненты связности подобранного края внешнего кольца w2; и
6.3) и наконец, вычисление разницы между подобранным участком внешнего кольца и другим участком внешнего кольца для получения разницы df, как показано в формуле (IX), и фильтрацию участка шумовых помех методом анализа характеристик области с компонентами связности для выполнения определения отсутствия резины, т.е. 
Кроме того, на этапе 7 определение облоя и запаивания включает: во-первых, выделение изображения кольцевого участка облоя, после чего сегментирование области исследования (Region of interest, сокр. - ROI) изображения методом фиксированного порогового значения и, наконец, удаление участка шумовых помех из компоненты связности после сегментации методом анализа характеристик области для выполнения определения облоя и запаивания.
Кроме того, на этапе 8 обнаружение дефектов зубцов юбки включает:
8.1) выделение изображения участка зубцов юбки по результату сегментации на этапе 3, выполнение пороговой сегментации и анализа характеристик области с компонентами связности на выделенной области исследования (Region of interest, сокр. - ROI) изображения и выделение участка зубцов юбки путем установки подходящего порогового значения;
8.2) вычисление количества зубцов юбки num по участку зубцов юбки, 0<num<22, и если num<21, на зубцах юбки отсутствуют дефекты, и процедура обнаружения завершается;
8.3) если количество зубцов юбки нормальное, вычисление угла между центром каждого зубца юбки и центром кроненпробки по центральному положению кроненпробки, и вычисление угловой разницы θ между соседними зубцами юбки; и
8.4) установка порогового значения угловой разницы θT, когда θ соответствует |θ|>θT, на кроненпробке имеются деформированные зубцы.
Более того, на этапе 9 способ создания автономного шаблона включает:
во-первых, выделение центрального кольцевого участка рельефа из шаблонного изображения путем применения метода пороговой сегментации, метода заполнения участка, метода фильтрации характеристик области и метода подбора наименьших квадратов;
после этого, обнаружение края шаблонного изображения методом Кенни для изображения центрального кольцевого участка; и
в завершение, выделение информации о положении и градиенте краевых точек для установки шаблона характеристик.
Кроме того, на этапе 10 алгоритм сопоставления с шаблоном характеристик включает:
10.1) во-первых, выполнение аффинного преобразования на шаблоне и удаление части трансляции в аффинном преобразовании, чтобы получить точное соответствующее положение;
10.2) после этого, вычисление суммы скалярных произведений векторов градиентов краевых точек после преобразования шаблона и соответствующих векторов градиентов краевых точек в изображении, нормализацию результатов расчета, установку (ri, ci), (ti, ui), (r, c), (vr,c, wr,c) в качестве информации о строчно-столбцовом положении i-го пикселя изображения, установку вектора градиента края, соответствующего шаблонной краевой точке, pi=(ri, ci)T как di=(ti, ui)T, и установку вектора градиента края, соответствующего краевой точке целевого изображения, (r, c) как er, c=(vr,c, wr,c)T; метод вычисления функции сходства в точке, подлежащей поиску, q = (r, c)T показан в виде формулы (X):
где s - показатель сходства, возвращенный за счет нормализованной функции корреляции, d'i=(A-1)Tdi, A - матрица преобразования поворота второго порядка, и чем ближе показатель совпадения к 1, тем выше степень сходства между соответствующим участком на изображении и шаблоном; и
10.3) наконец, применение стратегии пирамидального иерархического поиска для улучшения эффективности алгоритма и снижения времени сравнительного поиска с помощью порогового значения для установки условия прекращения сравнительного поиска, и установку Sj в качестве суммы скалярных произведений, накопленной до j-го элемента шаблона, и Smin в качестве самого низкого показателя совпадения; метод расчета нормализованной суммы скалярных произведений показан в виде формулы (XI), если Sj соответствует формуле (XII), показатель совпадения с шаблоном достигает Smin, и, следовательно, процесс сравнительного поиска останавливает расчет после j-го элемента;

установка показателя совпадения с шаблоном 0,9; и если нет совпадения с шаблоном, определение того факта, что на внешней поверхности присутствует неправильный рельеф.
На этапе 11 шаги алгоритма включают:
S1: вычисление аффинной матрицы между шаблоном и целевым изображением в соответствии со значением совпадения с шаблоном, изменение целевого изображения в направлении, аналогичном шаблону, путем аффинного преобразования, при этом матрица аффинного преобразования представлена в виде формулы (XIII),

где H (t) - матрица трансляций между шаблоном и целевым изображением, а H(R) - матрица преобразования поворота между шаблоном и целевым изображением;
S2: установку кольцевого участка рельефа области исследования (Region of interest, сокр. - ROI) по результату шага S1, сегментирование целевого изображения и шаблонного изображения с помощью фиксированного порогового значения с целью получения соответствующих участков Ro и Rt, и получение участка разницы Rd методом сравнения участков, как показано в формуле (XIV):

S3: выполнение анализа характеристик на компоненте связности участка разницы R путем анализа характеристик компонент связности и установку подходящего порогового значения характеристик области T для выполнения определения внешних поверхностных дефектов.
Положительные эффекты: В сравнении с предыдущим уровнем техники способ оперативного обнаружения поверхностных дефектов кроненпробок на основе обработки изображений, раскрывающийся в настоящем документе, включает следующие этапы: получение изображения внутренней поверхности кроненпробки, выполнение центрального позиционирования и выделения участка с помощью технологии сегментации изображения; обнаружение внутренних поверхностных дефектов кроненпробки с помощью алгоритмов обработки изображения, например, пороговой сегментации, анализа характеристик компонент связности и сравнения участков; создание шаблона рельефа внешней поверхности в автономном режиме путем применения алгоритма автоматического обучения; получение изображения внешней поверхности кроненпробки и завершение обнаружения внешних поверхностных дефектов кроненпробки методом сопоставления характеристик с шаблоном, методом аффинного преобразования и методом сравнения участков. Благодаря способу, раскрываемому в настоящем документе, можно быстро обнаружить различные дефекты на поверхности кроненпробки в оперативном режиме, включая темные пятна, вздутия, отсутствие резины, облой и запаивание, деформированные зубцы юбки и отсутствие зубцов юбки на внутренней поверхности, и отсутствие рельефа и неправильный рельеф на внешней поверхности, со скоростью до 300 кроненпробок в минуту; он обладает преимуществами высокой точности обнаружения дефектов, хорошей устойчивостью и т.д., и может быть реализован на линии по производству кроненпробок для выполнения обнаружения дефектов и определения их типа на кроненпробках.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
ФИГ. 1 - схема процесса обнаружения;
ФИГ. 2 - схематическое изображение кроненпробки;
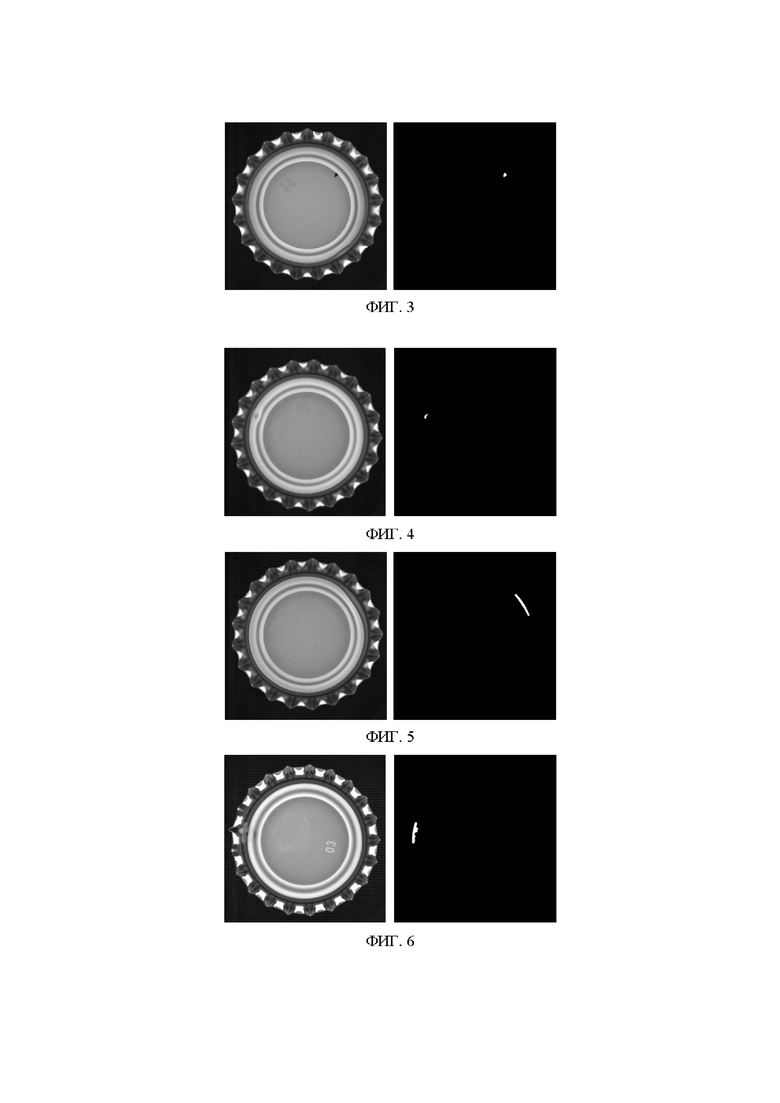
ФИГ. 3 - схематическое изображение результата обнаружения темного пятна;
ФИГ. 4 - схематическое изображение результата обнаружения темного вздутия;
ФИГ. 5 - схематическое изображение результата обнаружения отсутствия резины;
ФИГ. 6 - схематическое изображение результата обнаружения облоя и запаивания;
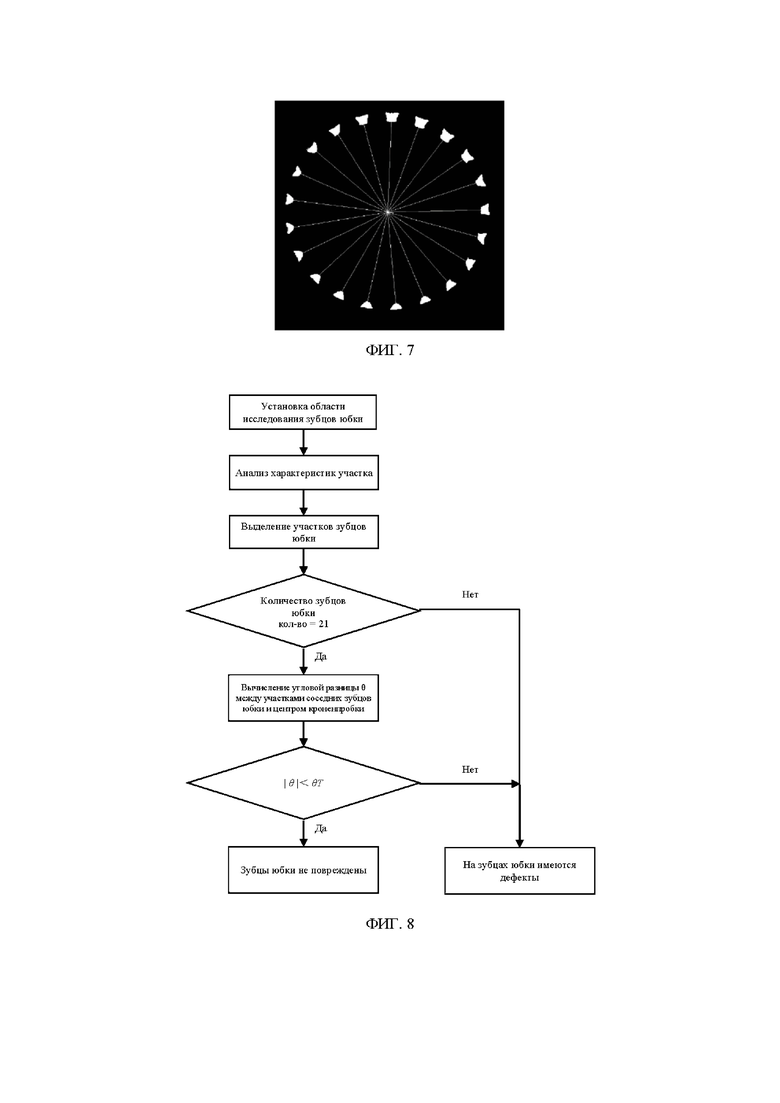
ФИГ. 7 - схематическое изображение внутреннего угла между зубцами юбки;
ФИГ. 8 - схема процесса обнаружения дефектов зубцов юбки; и
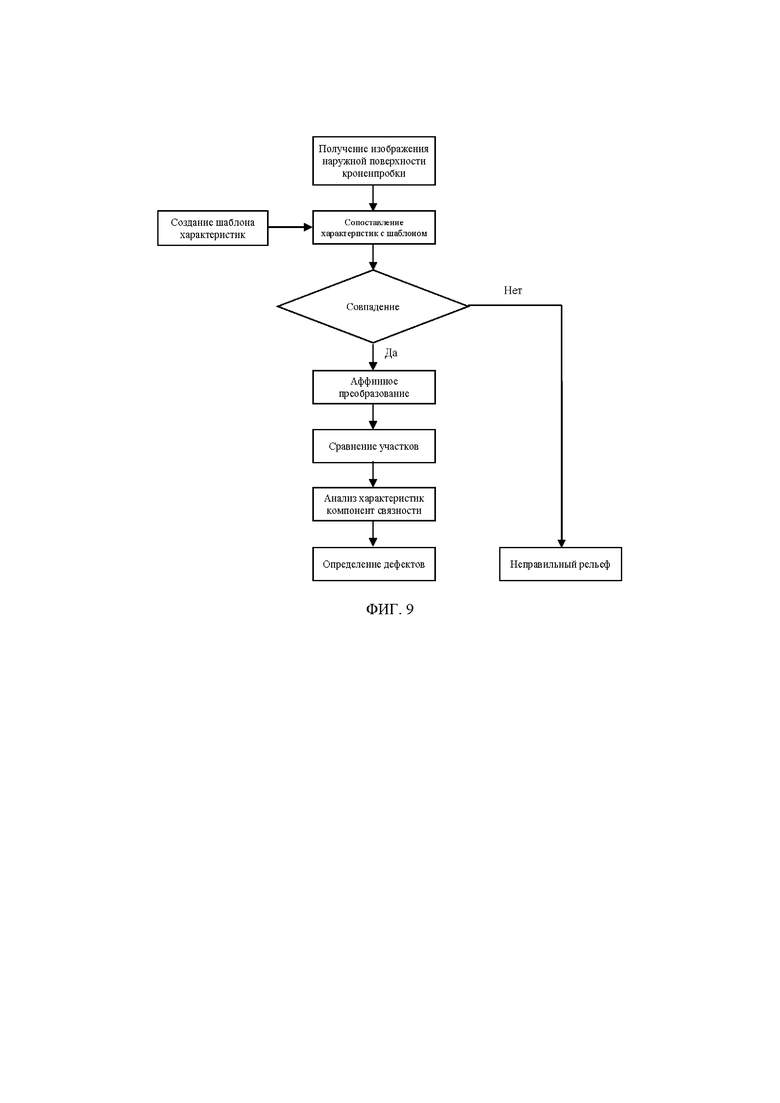
ФИГ. 9 - схема процесса обнаружения внешних поверхностных дефектов.
ПОДРОБНОЕ ОПИСАНИЕ
Для лучшего понимания сведений патента на настоящее изобретение далее будет представлено техническое решение по настоящему изобретению со ссылкой на чертежи и конкретные варианты осуществления.
Как показано на ФИГ. 1, процесс обнаружения поверхностных дефектов кроненпробки включает обнаружение на внутренней и внешней поверхностях, при этом обнаружение на внутренней поверхности включает получение изображения, определение центрального положения участка и обнаружение различных дефектов, включая темные пятна, отсутствие резины, вздутия на участке внутреннего и внешнего колец, облой и запаивание; обнаружение на внешней поверхности включает получение изображения внешней поверхности, центральное позиционирование участка и определение отсутствия рельефа и неправильного рельефа на внешней поверхности; обнаружение на внутренней и внешней поверхностях выполняется одновременно на двух станциях с независимыми системами захвата и обработки изображений. Согласно настоящему изобретению предлагается способ оперативного обнаружения поверхностных дефектов кроненпробок на основе обработки изображений, который включает:
этап 1: получение изображения внутренней поверхности кроненпробки системой захвата изображений, и выполнение обработки полученного изображения методом Гауссовой фильтрации;
этап 2: выделение центрального участка на требуемом изображении методом пороговой сегментации и методом анализа характеристик области с компонентами связности, и подбор кругового контура на краевых пикселях контура участка методом подбора наименьших квадратов для выполнения центрального позиционирования внутренней поверхности кронепробки;
этап 3: предварительная настройка информации о физическом радиусе разных участков для разных типов кроненпробок согласно координатам центрального положения кроненпробки, полученным на этапе 2, и выполнение сегментации участка внутренней поверхности кроненпробки в сочетании с параметрами соотношения пикселей изображения;
этап 4: выделение изображения на нужном участке внутренней поверхности по результату сегментации изображения на этапе 3, установка порогового значения яркости для завершения сегментации изображения, и удаление участка шумов методом анализа характеристик области для выполнения обнаружения темных пятен на внутренней поверхности кроненпробки;
этап 5: выделение изображения на участках внутреннего и внешнего колец согласно результату сегментации изображения на этапе 3, завершение сегментации изображения за счет применения метода локального порога, и удаление участка шумов методом анализа характеристик области для выполнения обнаружения вздутий на участках внутреннего и внешнего колец на внутренней поверхности кроненпробки;
этап 6: получение контура края участка внешнего кольца полученного изображения методом фиксированной пороговой сегментации, выполнение кругового подбора пикселей контура внешнего кольца методом наименьших квадратов, и сравнение отличий участка между участком контура внешнего кольца и участком подбора для выполнения обнаружения отсутствия резины;
этап 7: выделение изображения участка облоя по результату сегментации изображения на этапе 3, и выполнение обнаружения облоя и запаивания методом фиксированной пороговой сегментации и методом анализа характеристик области;
этап 8: выделение компоненты связности зубцов юбки по результату сегментации изображения на этапе 3, вычисление количества компонент связности, расчет внутреннего угла между компонентой связности и центром кроненпробки, и определение того, имеются ли дефекты на зубцах юбки по разнице внутреннего угла соседних зубцов юбки;
этап 9: получение изображения внешней поверхности стандартной кроненпробки, выполнение обработки полученного изображения методом Гауссовой фильтрации, и создание автономного шаблона характеристик согласно информации о характеристиках контура изображения;
этап 10: установка показателя совпадения с шаблоном, и обнаружение и позиционирование изображения, которое подвергается процедуре обнаружения, методом сопоставления характеристик с шаблоном после обработки методом Гауссовой фильтрации; и
этап 11: выполнение аффинного преобразования на целевом изображении по результату сопоставления с шаблоном на этапе 10, выполнение пороговой сегментации и сравнения участка на шаблонном и целевом изображениях соответственно, и выполнение обнаружения внешних поверхностных дефектов методом анализа характеристик области с компонентами связности.
На этапе 1 система захвата изображений включает промышленную камеру со строчно-кадровой разверткой, кольцевой источник освещения под малым углом и промышленный персональный компьютер; в промышленной камере со строчно-кадровой разверткой используется режим съемки, запускаемый датчиком, для завершения сбора данных.
Как показано на ФИГ. 2, на этапах 2 и 3 внутренняя поверхность кроненпробки делится на центральный участок R1, участок внутреннего кольца R2, участок среднего кольца R3, участок внешнего кольца R4, участок облоя R5 и участок зубцов юбки R6, а способ определения положения центрального участка R1 включает:
во-первых, выполнение пороговой сегментации на изображении на основе метода максимальной дисперсии между классами, установку размера изображения M×N и количества пикселей со значениями яркости i на ni, после чего вероятность отличия уровней яркости будет , выполнение бинаризации на изображении с помощью порогового значения яркости k для получения участков C1 и C2 со средними значениями u1 и u2, и вероятностями P1(k) и P2(k), после чего:

где 0<k<255, и среднее значение u всего изображения:
целевая функция:
выбор k, когда g(k) является максимальным пороговым значением сегментации по методу максимальной дисперсии между классами;
после чего установка компоненты связности с наибольшей областью выделения в качестве центрального участка, как показано в формуле (V):
где R представляет собой область участка, а именно, количество пикселей на участке, а gvalue представляет собой значение яркости; и
в завершение, выполнение кругового подбора на краевых пикселях участка методом наименьших квадратов, установка P(xi, yi) в качестве контурной точки, LRi в качестве расстояния от P(xi, yi) до подобранного круга, и N в качестве общего количества пикселей изображения, полученного по формуле (VI) для определения центра (a, b) и радиуса R подобранного круга и центрального участка R1 по результату обнаружения;
выполнение сегментации участка внутренней поверхности кроненпробки включает: предварительную настройку информации о физическом радиусе разных участков согласно типам кроненпробок, получение информации о радиусе разных участков в пикселях с помощью параметров соотношения пикселей, и объединение с информацией о положении центрального участка.
На этапе 4 обнаружение темных пятен на внутренней поверхности кроненпробки включает: во-первых, сегментирование изображения методом фиксированного порогового значения, затем анализ компоненты связности после пороговой сегментации и, наконец, установку подходящего порогового значения участка для выполнения определения темных пятен; результат обнаружения - согласно ФИГ. 3.
На этапе 5 обнаружение вздутия на участке внутреннего кольца R2 и участке внешнего кольца R4 на внутренней поверхности кроненпробки включает:
во-первых, завершение сегментации изображения методом локального динамического порога для установки локального порогового значения представлено в виде формул (VII) и (VIII):
где a и b - среднее значение и коэффициент дисперсии соответственно, t - фиксированное значение и g(x, y) - выходное изображение; после пороговой сегментации - установку подходящего порогового значения области и фильтрацию участка шумовых помех с небольшой областью методом анализа характеристик области с компонентами связности для выполнения обнаружения вздутий; результат обнаружения - согласно ФИГ. 3. 4.
На этапе 6 обнаружение отсутствия резины включает:
6.1) во-первых, выделение компоненты связности края внешнего кольца w1 методом пороговой сегментации и методом анализа характеристик области с компонентами связности;
6.2) после этого, подбор круга крайний круг участка внешнего кольца методом наименьших квадратов для получения экспоненты связности подобранного края внешнего кольца w2; и
6.3) и наконец, вычисление разницы между подобранным участком внешнего кольца и другим участком внешнего кольца для получения разницы df, как показано в формуле (IX), и фильтрацию участка шумовых помех методом анализа характеристик области с компонентами связности для выполнения определения отсутствия резины; результат обнаружения - согласно ФИГ. 5;
На этапе 7 определение облоя и запаивания включает: во-первых, выделение изображения кольцевого участка облоя, после чего сегментирование области исследования (Region of interest, сокр. - ROI) изображения методом фиксированного порогового значения и, наконец, удаление участка шумовых помех из компоненты связности после сегментации методом анализа характеристик области для выполнения определения облоя и запаивания; результат обнаружения - согласно ФИГ. 6.
На этапе 8 процесс обнаружения дефектов зубцов юбки, как показано на ФИГ. 7, включает:
8.1) выделение изображения участка зубцов юбки по результату сегментации на этапе 3, выполнение пороговой сегментации и анализа характеристик области с компонентами связности на выделенной области исследования (Region of interest, сокр. - ROI) изображения и выделение участка зубцов юбки путем установки подходящего порогового значения;
8.2) вычисление количества зубцов юбки num по участку зубцов юбки, 0<num<22, и если num<21, на зубцах юбки отсутствуют дефекты, и процедура обнаружения завершается;
8.3) если количество зубцов юбки нормальное, вычисление угла между центром каждого зубца юбки и центром кроненпробки по центральному положению кроненпробки, при этом результат обнаружения соответствует ФИГ. 8, и вычисление угловой разницы θ между соседними зубцами юбки; и
8.4) установка порогового значения угловой разницы θT, когда θ соответствует |θ|>θT, на кроненпробке имеются деформированные зубцы.
Как представлено на ФИГ. 9, процесс обнаружения внешних поверхностных дефектов кроненпробок включает создание автономного шаблона, сопоставление характеристик с шаблоном, аффинное преобразование, сравнение участков, анализ характеристик компонент связности и т.д.
На этапе 9 способ создания автономного шаблона включает:
во-первых, выделение центрального кольцевого участка рельефа из шаблонного изображения путем применения метода пороговой сегментации, метода заполнения участка, метода фильтрации характеристик области и метода подбора наименьших квадратов;
после этого, обнаружение края шаблонного изображения методом Кенни для изображения центрального кольцевого участка; и
в завершение, выделение информации о положении и градиенте краевых точек для установки шаблона характеристик.
На этапе 10 алгоритм сопоставления с шаблоном характеристик включает:
10.1) во-первых, выполнение аффинного преобразования на шаблоне и удаление части трансляции в аффинном преобразовании, чтобы получить точное соответствующее положение;
10.2) после этого, вычисление суммы скалярных произведений векторов градиентов краевых точек после преобразования шаблона и соответствующих векторов градиентов краевых точек в изображении, нормализацию результатов расчета, установку (ri, ci), (ti, ui), (r, c), (vr,c, wr,c) в качестве информации о строчно-столбцовом положении i-го пикселя в изображении, установку вектора градиента края соответствующего шаблонной краевой точке, pi=(ri, ci)T как di=(ti ,ui)T, и установку вектора градиента края, соответствующего краевой точке целевого изображения, (r, c) как er, c=(vr,c, wr,c)T; метод вычисления функции сходства в точке, подлежащей поиску, q=(r, c)T показан в виде формулы (X):
где s - показатель сходства, возвращенный за счет нормализованной функции корреляции, d'i=(A-1)T di, A - матрица преобразования поворота второго порядка, и чем ближе показатель совпадения к 1, тем выше степень сходства между соответствующим участком на изображении и шаблоном; и
10.3) наконец, применение стратегии пирамидального иерархического поиска для улучшения эффективности алгоритма и снижения времени сравнительного поиска с помощью порогового значения для установки условия прекращения сравнительного поиска, и установку Sj в качестве суммы скалярных произведений, накопленной до j-го элемента шаблона, и Smin в качестве самого низкого показателя совпадения; метод расчета нормализованной суммы скалярных произведений показан в виде формулы (XI), если Sj соответствует формуле (XII), показатель совпадения с шаблоном достигает Smin, и, следовательно, процесс сравнительного поиска останавливает расчет после j-го элемента;
и
установка показателя совпадения с шаблоном 0,9, и если нет совпадения с шаблоном, определение того факта, что на внешней поверхности присутствует неправильный рельеф.
На этапе 11 шаги алгоритма включают:
S1: вычисление аффинной матрицы между шаблоном и целевым изображением в соответствии со значением совпадения с шаблоном, изменение целевого изображения в направлении, аналогичном шаблону, путем аффинного преобразования, при этом матрица аффинного преобразования представлена в виде формулы (XIII),
где H (t) - матрица трансляций между шаблоном и целевым изображением, а H(R) - матрица преобразования поворота между шаблоном и целевым изображением;
S2: установку кольцевого участка рельефа области исследования (Region of interest, сокр. - ROI) по результату шага S1, сегментирование целевого изображения и шаблонного изображения с помощью фиксированного порогового значения с целью получения соответствующих участков Ro и Rt, и получение участка разницы Rd методом сравнения участков, как показано в формуле (XIV):
S3: выполнение анализа характеристик на компоненте связности участка разницы R путем анализа характеристик компонент связности и установку подходящего порогового значения характеристик области T для выполнения определения внешних поверхностных дефектов.
Вышеприведенное описание относится исключительно к предпочтительному варианту осуществления настоящего изобретения. Специалисты в данной области техники должны учитывать, что к разным положениям по реализации могут применяться изменения без отступления от принципов настоящего изобретения. Такие изменения должны входить в объем правовой охраны этого изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕГМЕНТАЦИИ РАСТРОВЫХ ИЗОБРАЖЕНИЙ НА ОСНОВЕ ВЫРАЩИВАНИЯ И СЛИЯНИЯ ОБЛАСТЕЙ | 2010 |
|
RU2440609C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФЕКТОВ НА ИЗОБРАЖЕНИИ КОМПОЗИЦИОННЫХ ИЗДЕЛИЙ | 2022 |
|
RU2807288C1 |
| СПОСОБ СЕГМЕНТАЦИИ ИЗОБРАЖЕНИЯ | 2014 |
|
RU2557484C1 |
| Устройство сегментации изображений | 2018 |
|
RU2695980C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ПОДДЕЛКИ ДОКУМЕНТОВ | 2023 |
|
RU2825085C1 |
| УСТРОЙСТВО ОБРАБОТКИ ВИДЕОИНФОРМАЦИИ СИСТЕМЫ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2484531C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ТЕКСТА НА ИЗОБРАЖЕНИЯХ ДОКУМЕНТОВ | 2021 |
|
RU2768544C1 |
| Способ контроля пространственного положения участников спортивного события на игровом поле | 2016 |
|
RU2616152C1 |
| Способ детектирования флуоресцирующих клеевых пятен на изображениях документов, удостоверяющих личность, в УФ спектре | 2023 |
|
RU2814914C1 |
| СЕГМЕНТАЦИЯ ПРИ МР-ВИЗУАЛИЗАЦИИ СЕРДЦА В ПРОЕКЦИИ ПО ДЛИННОЙ ОСИ С ПОЗДНИМ УСИЛЕНИЕМ КОНТРАСТА | 2009 |
|
RU2522038C2 |
Изобретение относится к способу оперативного обнаружения поверхностных дефектов кроненпробок на основе обработки изображений. Технический результат заключается в повышении точности детектирования дефектов кроненпробок. Способ содержит этап 1: получение изображения внутренней поверхности кроненпробки системой захвата изображений и выполнение обработки полученного изображения методом Гауссовой фильтрации; этап 2: выделение центрального участка на требуемом изображении методом пороговой сегментации и методом анализа характеристик области со связанными компонентами и подбор кругового контура на краевых пикселях центрального контура участка методом подбора наименьших квадратов для выполнения определения центрального положения внутренней поверхности кроненпробки; этап 3: предварительная настройка информации о физическом радиусе разных участков для разных типов кроненпробок согласно координатам центрального положения кроненпробки, полученным на этапе 2, и выполнение сегментации участка внутренней поверхности кроненпробки в сочетании с параметрами соотношения пикселей изображения; этап 4: выделение изображения на нужном участке внутренней поверхности по результату сегментации изображения на этапе 3, установка фиксированного порогового значения яркости для завершения сегментации изображения и удаление участка шумов методом анализа характеристик области с компонентами связности для выполнения обнаружения темных пятен на внутренней поверхности кроненпробки; этап 5: выделение изображения на внутреннем и внешнем кольцевых участках согласно результату сегментации изображения на этапе 3, завершение сегментации изображения за счет применения метода локального порога и удаление участка шумов методом анализа характеристик области с компонентами связности для выполнения обнаружения вздутий на внутреннем и внешнем кольцевых участков на внутренней поверхности кроненпробки; этап 6: получение контура края внешнего кольцевого участка полученного изображения методом фиксированной пороговой сегментации, выполнение кругового подбора пикселей внешнего кольцевого контура методом наименьших квадратов и сравнение отличий между участком внешнего кольцевого контура и участком подбора для выполнения обнаружения отсутствия резины; этап 7: выделение изображения участка облоя по результату сегментации изображения на этапе 3 и выполнение обнаружения облоя и запаивания методом фиксированной пороговой сегментации и методом анализа характеристик области; этап 8: выделение компоненты связности зубцов юбки по результату сегментации изображения на этапе 3, вычисление количества компонент связности, расчет внутреннего угла между компонентой связности и центром кроненпробки и определение того, имеются ли дефекты на зубцах юбки по разнице внутреннего угла соседних зубцов юбки; этап 9: получение изображения внешней поверхности стандартной кроненпробки, выполнение обработки полученного изображения методом Гауссовой фильтрации и создание автономного шаблона характеристик согласно информации о характеристиках контура изображения; этап 10: установка показателя совпадения с шаблоном и обнаружение и позиционирование изображения, которое подвергается процедуре обнаружения, методом сопоставления характеристик с шаблоном после обработки методом Гауссовой фильтрации; и этап 11: выполнение аффинного преобразования на целевом изображении по результату сопоставления с шаблоном на этапе 10, выполнение пороговой сегментации и сравнения участка на шаблонном и целевом изображениях соответственно и выполнение обнаружения внешних поверхностных дефектов методом анализа характеристик области с компонентами связности. 9 з.п. ф-лы, 9 ил. 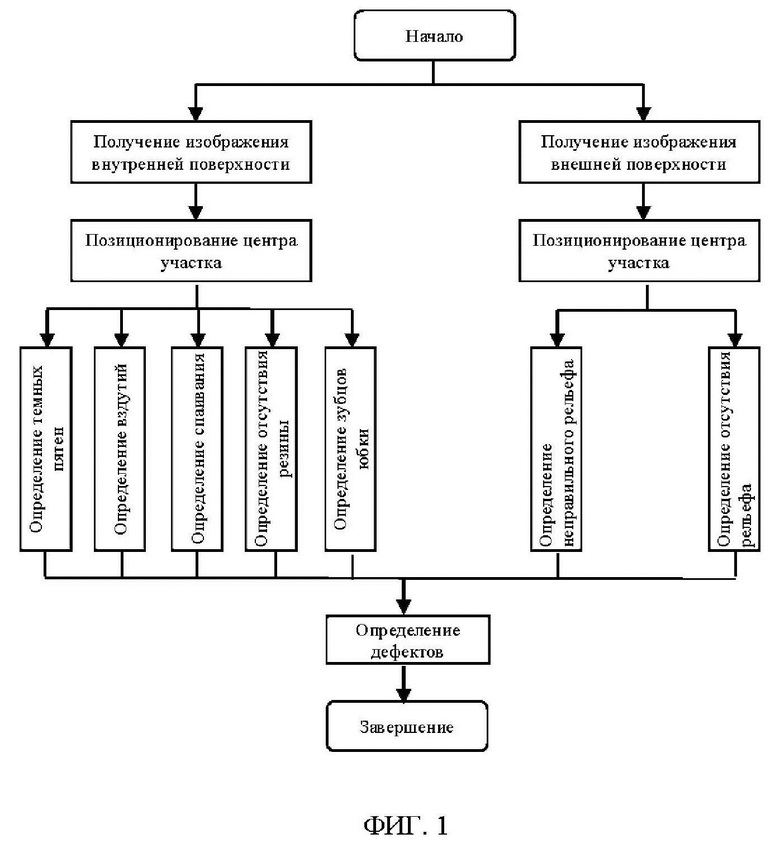
1. Способ оперативного обнаружения поверхностных дефектов кроненпробок на основе обработки изображений, включающий:
этап 1: получение изображения внутренней поверхности кроненпробки системой захвата изображений и выполнение обработки полученного изображения методом Гауссовой фильтрации;
этап 2: выделение центрального участка на требуемом изображении методом пороговой сегментации и методом анализа характеристик области со связанными компонентами и подбор кругового контура на краевых пикселях центрального контура участка методом подбора наименьших квадратов для выполнения определения центрального положения внутренней поверхности кроненпробки;
этап 3: предварительная настройка информации о физическом радиусе разных участков для разных типов кроненпробок согласно координатам центрального положения кроненпробки, полученным на этапе 2, и выполнение сегментации участка внутренней поверхности кроненпробки в сочетании с параметрами соотношения пикселей изображения;
этап 4: выделение изображения на нужном участке внутренней поверхности по результату сегментации изображения на этапе 3, установка фиксированного порогового значения яркости для завершения сегментации изображения и удаление участка шумов методом анализа характеристик области с компонентами связности для выполнения обнаружения темных пятен на внутренней поверхности кроненпробки;
этап 5: выделение изображения на внутреннем и внешнем кольцевых участках согласно результату сегментации изображения на этапе 3, завершение сегментации изображения за счет применения метода локального порога и удаление участка шумов методом анализа характеристик области с компонентами связности для выполнения обнаружения вздутий на внутреннем и внешнем кольцевых участков на внутренней поверхности кроненпробки;
этап 6: получение контура края внешнего кольцевого участка полученного изображения методом фиксированной пороговой сегментации, выполнение кругового подбора пикселей внешнего кольцевого контура методом наименьших квадратов и сравнение отличий между участком внешнего кольцевого контура и участком подбора для выполнения обнаружения отсутствия резины;
этап 7: выделение изображения участка облоя по результату сегментации изображения на этапе 3 и выполнение обнаружения облоя и запаивания методом фиксированной пороговой сегментации и методом анализа характеристик области;
этап 8: выделение компоненты связности зубцов юбки по результату сегментации изображения на этапе 3, вычисление количества компонент связности, расчет внутреннего угла между компонентой связности и центром кроненпробки и определение того, имеются ли дефекты на зубцах юбки по разнице внутреннего угла соседних зубцов юбки;
этап 9: получение изображения внешней поверхности стандартной кроненпробки, выполнение обработки полученного изображения методом Гауссовой фильтрации и создание автономного шаблона характеристик согласно информации о характеристиках контура изображения;
этап 10: установка показателя совпадения с шаблоном и обнаружение и позиционирование изображения, которое подвергается процедуре обнаружения, методом сопоставления характеристик с шаблоном после обработки методом Гауссовой фильтрации; и
этап 11: выполнение аффинного преобразования на целевом изображении по результату сопоставления с шаблоном на этапе 10, выполнение пороговой сегментации и сравнения участка на шаблонном и целевом изображениях соответственно и выполнение обнаружения внешних поверхностных дефектов методом анализа характеристик области с компонентами связности.
2. Способ оперативного обнаружения поверхностных дефектов кроненпробок на основе обработки изображений по п. 1, отличающийся тем, что на этапе 1 система захвата изображений включает промышленную камеру со строчно-кадровой разверткой, кольцевой источник освещения под малым углом и промышленный персональный компьютер; в промышленной камере со строчно-кадровой разверткой используется режим съемки, запускаемый датчиком, для завершения захвата изображения.
3. Способ оперативного обнаружения поверхностных дефектов кроненпробок на основе обработки изображений по п. 1, отличающийся тем, что на этапах 2 и 3 внутренняя поверхность кроненпробки делится на центральный участок R1, участок внутреннего кольца R2, участок среднего кольца R3, участок внешнего кольца R4, участок облоя R5 и участок зубцов юбки R6, а способ центрального позиционирования участка R1 включает:
во-первых, выполнение пороговой сегментации на изображении на основе метода максимальной дисперсии между классами, установку размера изображения M×N и количества пикселей со значениями яркости i на ni, после чего вероятность отличия уровней яркости будет  , выполнение бинаризации на изображении с помощью порогового значения яркости k для получения участков C1 и C2 со средними значениями u1 и u2 и вероятностями P1(k) и P2(k), после чего:
, выполнение бинаризации на изображении с помощью порогового значения яркости k для получения участков C1 и C2 со средними значениями u1 и u2 и вероятностями P1(k) и P2(k), после чего:

где 0<k<255 и среднее значение u всего изображения 
целевая функция 
выбор k, когда g(k) является максимальным пороговым значением сегментации по методу максимальной дисперсии между классами;
после чего установку компоненты связности с наибольшей областью выделения в качестве центрального участка, как показано в формуле (V):

где R представляет собой область участка, а именно количество пикселей на участке, а gvalue представляет собой значение яркости; и
в завершение, выполнение кругового подбора на краевых пикселях участка методом наименьших квадратов, установку P(xi, yi) в качестве контурной точки, LRi в качестве расстояния от P(xi , yi) до подобранного круга и N в качестве общего количества пикселей изображения, полученного по формуле (VI) для определения центра (a, b) и радиуса R подобранного круга и центрального участка R1 по результату обнаружения;
выполнение сегментации участка внутренней поверхности кроненпробки включает: предварительную настройку информации о физическом радиусе разных участков согласно типам кроненпробок, получение информации о радиусе в пикселях разных участков с помощью параметров соотношения пикселей и объединение информации о положении центрального участка.
4. Способ оперативного обнаружения поверхностных дефектов кроненпробок на основе обработки изображений по п. 3, отличающийся тем, что на этапе 4 обнаружение темных пятен на внутренней поверхности кроненпробки включает: во-первых, сегментирование изображения методом фиксированного порогового значения, затем анализ компоненты связности после пороговой сегментации и, наконец, установку подходящего порогового значения участка для выполнения определения темных пятен.
5. Способ оперативного обнаружения поверхностных дефектов кроненпробок на основе обработки изображений по п. 1, отличающийся тем, что на этапе 5 обнаружение вздутия на участке внутреннего кольца R2 и участке внешнего кольца R4 на внутренней поверхности кроненпробки включает:
во-первых, завершение сегментации изображения методом локального динамического порога для установки локального порогового значения представлено в виде формул (VII) и (VIII):

где a и b - среднее значение и коэффициент дисперсии соответственно, t - фиксированное значение и g(x, y) - выходное изображение; после пороговой сегментации - установку подходящего порогового значения области и фильтрацию участка шумовых помех с небольшой областью методом анализа характеристик области с компонентами связности для выполнения обнаружения вздутий.
6. Способ оперативного обнаружения поверхностных дефектов кроненпробок на основе обработки изображений по п. 1, отличающийся тем, что на этапе 6 обнаружение отсутствия резины включает:
6.1) во-первых, выделение компоненты связности края внешнего кольца w1 методом пороговой сегментации и методом анализа характеристик области с компонентами связности;
6.2) после этого, подбор круга крайний круг участка внешнего кольца методом наименьших квадратов для получения экспоненты связности подобранного края внешнего кольца w2; и
6.3) наконец, вычисление разницы между подобранным участком внешнего кольца и другим участком внешнего кольца для получения разницы df, как показано в формуле (IX), и фильтрацию участка шумовых помех методом анализа характеристик области с компонентами связности для выполнения определения отсутствия резины, т.е. 
7. Способ оперативного обнаружения поверхностных дефектов кроненпробок на основе обработки изображений по п. 6, отличающийся тем, что на этапе 7 определение облоя и запаивания включает: во-первых, выделение изображения кольцевого участка облоя, после чего сегментирование области исследования (Region of interest, сокр. - ROI) изображения методом фиксированного порогового значения и, наконец, удаление участка шумовых помех из компоненты связности после сегментации методом анализа характеристик области для выполнения определения облоя и запаивания.
8. Способ оперативного обнаружения поверхностных дефектов кроненпробок на основе обработки изображений по п. 1, отличающийся тем, что на этапе 8 обнаружение дефектов зубцов юбки включает:
8.1) выделение изображения участка зубцов юбки по результату сегментации на этапе 3, выполнение пороговой сегментации и анализа характеристик области с компонентами связности на выделенной области исследования (Region of interest, сокр. - ROI) изображения и выделение участка зубцов юбки путем установки подходящего порогового значения;
8.2) вычисление количества зубцов юбки num по участку зубцов юбки, 0 < num < 22, и если num < 21, на зубцах юбки отсутствуют дефекты, и процедура обнаружения завершается;
8.3) если количество зубцов юбки нормальное, вычисление угла между центром каждого зубца юбки и центром кроненпробки по центральному положению кроненпробки и вычисление угловой разницы θ между соседними зубцами юбки; и
8.4) установку порогового значения угловой разницы θT, когда θ соответствует |θ|>θT, на кроненпробке имеются деформированные зубцы.
9. Способ оперативного обнаружения поверхностных дефектов кроненпробок на основе обработки изображений по п. 8, отличающийся тем, что на этапе 9 способ создания автономного шаблона включает:
во-первых, выделение центрального кольцевого участка рельефа из шаблонного изображения путем применения метода пороговой сегментации, метода заполнения участка, метода фильтрации характеристик области и метода подбора наименьших квадратов;
после этого, обнаружение края шаблонного изображения методом Кенни для изображения центрального кольцевого участка; и, в завершение, выделение информации о положении и градиенте краевых точек для установки шаблона характеристик.
10. Способ оперативного обнаружения поверхностных дефектов кроненпробок на основе обработки изображений по п. 9, отличающийся тем, что
на этапе 10 алгоритм сопоставления с шаблоном характеристик включает:
10.1) во-первых, выполнение аффинного преобразования на шаблоне и удаление части трансляции в аффинном преобразовании, чтобы получить точное соответствующее положение;
10.2) после этого, вычисление суммы скалярных произведений векторов градиентов краевых точек после преобразования шаблона и соответствующих векторов градиентов краевых точек в изображении, нормализацию результатов расчета, установку (ri, ci), (ti, ui), (r, c), (vr,c, wr,c) в качестве информации о строчно-столбцовом положении i-го пикселя в изображении, установку вектора градиента края, соответствующего шаблонной краевой точке, pi=(ri, ci)T как di=(ti ,ui)T, и установку вектора градиента края, соответствующего краевой точке целевого изображения, (r, c) как er,c=(vr,c, wr,c)T; метод вычисления функции сходства в точке, подлежащей поиску, q=(r, c)T показан в виде формулы (X):
где s - показатель сходства, возвращенный за счет нормализованной функции корреляции, d'i=(A-1)Tdi, A - матрица преобразования поворота второго порядка, и чем ближе показатель совпадения к 1, тем выше степень сходства между соответствующим участком на изображении и шаблоном; и
10.3) наконец, применение стратегии пирамидального иерархического поиска для улучшения эффективности алгоритма и снижения времени сравнительного поиска с помощью порогового значения для установки условия прекращения сравнительного поиска и установку Sj в качестве суммы скалярных произведений, накопленной до j-го элемента шаблона, и Smin в качестве самого низкого показателя совпадения; метод расчета нормализованной суммы скалярных произведений показан в виде формулы (XI), если Sj соответствует формуле (XII), показатель совпадения с шаблоном достигает Smin, и, следовательно, процесс сравнительного поиска останавливает расчет после j-го элемента;

установку показателя совпадения с шаблоном 0,9, и если нет совпадения с шаблоном, определение того факта, что на внешней поверхности кроненпробки присутствует неправильный рельеф;
на этапе 11 шаги алгоритма включают:
S1: вычисление аффинной матрицы между шаблоном и целевым изображением в соответствии со значением совпадения с шаблоном, изменение целевого изображения в направлении, аналогичном шаблону, путем аффинного преобразования, при этом матрица аффинного преобразования представлена в виде формулы (XIII),

где H(t) - матрица трансляций между шаблоном и целевым изображением, а H(R) - матрица преобразования поворота между шаблоном и целевым изображением;
S2: установку кольцевого участка рельефа области исследования (Region of interest, сокр. - ROI) по результату шага S1, сегментирование целевого изображения и шаблонного изображения с помощью фиксированного порогового значения с целью получения соответствующих участков Ro и Rt и получение участка разницы Rd методом сравнения участков, как показано в формуле (XIV):

S3: выполнение анализа характеристик на компоненте связности участка разницы R путем анализа характеристик компонент связности и установку подходящего порогового значения характеристик области T для выполнения определения внешних поверхностных дефектов.
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПРОТЯЖЕННЫХ КОНТУРОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2016 |
|
RU2628172C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ РАЗВЕРТКИ ПОВЕРХНОСТИ ОБЪЕКТОВ, БЛИЗКИХ К ЦИЛИНДРУ ИЛИ К ПЛОСКОСТИ | 2002 |
|
RU2212651C1 |
| JP 2006300711 A, 02.11.2006 | |||
| CN 102192911 A, 21.09.2011 | |||
| CN 104700423 A, 10.06.2015 | |||
| CN 103606169 A, 26.02.2014 | |||
| CN 107228860 A, 03.10.2017 | |||
| CN 105784713 B, 04.01.2019 | |||
| JP 2005035546 A, 10.02.2005 | |||
| CN 107247057 A, 13.10.2017 | |||
| CN 103606167 B, 31.08.2016 | |||
| CN 104764746 B, 05.04.2017 | |||
| CN 103439347 | |||

