Изобретение относится к области железнодорожного транспорта, а именно к способу автоматического управления током тяговых электродвигателей подвижных составов переменного тока.
В качестве способа управления током тяговых электродвигателей, как правило, применяют способ пропорционально-интегрирующего (ПИ) регулирования, получивший широкое распространение для управления различными техническими объектами. При ПИ-регулировании на исполнительный элемент оказывается воздействие, пропорциональное рассогласованию между заданной величиной входного сигнала и фактической величиной и интегралу от рассогласования.
В качестве прототипа выбран способ автоматического управления током тяговых электродвигателей подвижного состава, включающий ввод параметров электрического тока с задающего устройства, регистрацию введенных параметров электрического тока устройством управления, передачу электрического тока с заданными параметрами на тяговый электродвигатель, измерение датчиком тока фактических значений параметров электрического тока тягового электродвигателя и сравнение его в устройстве управления с заданными параметрами электрического тока [RU 90592 U1, дата публикации: 10.01.2010 г. МПК: G05F 1/10; G05F 1/455],
Недостатком прототипа является нестабильность качества автоматического управления током тягового электродвигателя, обусловленная тем, что при управлении не производится учет влияния нестационарности свойств объекта регулирования, в частности изменений напряжения контактной сети, питающей тяговый электродвигатель подвижного состава, на показатели качества управления. Нестационарность объекта регулирования приводит к возрастанию времени регулирования в 5-8 раз при изменении начальных условий работы объекта регулирования, а также к возрастанию величины перерегулирования, что существенно снижает эффективность автоматического управления током тяговых электродвигателей. Отклонение данных показателей приводит к длительному воздействию перерегулирования на обмотки тягового электродвигателя, что негативно сказывается на его работе, и может привести к его преждевременному износу и выходу из строя. Также нестабильность показателей управления обусловлена тем, что регулирование производилось без учета влияния на них нелинейности кривой намагничивания тягового электродвигателя. Возрастание нелинейности кривой намагничивания приводит к снижению быстродействия контура, осуществляющего управление током тягового электродвигателя подвижного состава, что также снижает эффективность автоматического управления током тяговых электродвигателей.
Техническая проблема, на решение которой направлено изобретение, заключается в необходимости повышения качества автоматического управления током тяговых электродвигателей подвижного состава.
Технический результат, на достижение которого направлено изобретение, заключается в повышении эффективности автоматического управления током тяговых электродвигателей подвижного состава.
Сущность изобретения заключается в следующем.
Способ автоматического управления током тяговых электродвигателей подвижного состава включает ввод параметров электрического тока с задающего устройства, регистрацию устройством сравнения введенных параметров электрического тока, передачу электрического тока устройством управления с заданными параметрами на тяговый электрический двигатель, измерение измерительным устройством фактических значений параметров электрического тока, определение устройством сравнения разности между значениями параметров заданного электрического тока и измеренными фактическими значениями параметров электрического тока.
В отличие от прототипа при измерении фактических значений параметров электрического тока измерительным устройством, осуществляется получение значений параметров силы электрического тока, фильтром усредняются значения силы электрического тока, регулятором отклонения осуществляется формирование коррекционного воздействия с учетом полученных на вход разности между значениями параметров заданного электрического тока и усредненным значением силы электрического тока, полученным устройством сравнения, а также усредненным значением силы электрического тока, полученным регулятором отклонения, дополнительно осуществляется измерение скорости вращения тягового электрического двигателя, функциональным преобразователем вводится положительная обратная связь по электродвижущей силе (ЭДС) тягового электрического двигателя с учетом полученных на вход скорости вращения тягового электрического двигателя и усредненного значения силы электрического тока, дополнительно устройством измерения осуществляется измерение величины напряжения электрического тока вторичной обмотки трансформатора тяговой подстанции, фильтром усредняются значения величины напряжения электрического тока вторичной обмотки трансформатора тяговой подстанции, регулятором возмущения осуществляется формирование коррекционного воздействия с учетом полученных на вход усредненного значения величины напряжения электрического тока вторичной обмотки трансформатора тяговой подстанции, дополнительным устройством сравнения осуществляется получение коррекционного воздействия от регулятора отклонения, положительной обратной связи по ЭДС от функционального преобразователя и коррекционного воздействия от регулятора возмущения и определение величины управляющего воздействия на устройство управления.
Основной контур управления током тяговых электродвигателей обеспечивает реализацию способа автоматического управления током тяговых электродвигателей подвижного состава b реализован на базе микропроцессорной техники.
Основной контур содержит такие функциональные элементы, как: контактная сеть, задающее устройство, устройства сравнения, регулятор отклонения и регулятор возмущения, фильтры, функциональный преобразователь, устройство управления, выпрямительно-инверторный преобразователь (ВИП), выпрямитель возбуждения, тяговый электродвигатель и датчики тока, линейной скорости вращения тягового электродвигателя и напряжения.
Контактная сеть предназначена для питания тягового электродвигателя подвижного состава и содержит трансформатор тяговой подстанции. Вторичная обмотка трансформатора тяговой подстанции подключена к обмоткам тягового электродвигателя через ВИП.
Задающее устройство предназначено для ввода в систему значений электрического тока iз может быть представлено в виде внешнего контура управления скоростью или рукоятки контроллера машиниста.
Устройства сравнения, регулятор отклонения и регулятор возмущения, фильтры, функциональный преобразователь, устройство управления, ВИП а также выпрямитель возбуждения могут быть представлены в виде элементов микросхемы, нанесенной на печатную плату и реализующей алгоритм способа по изобретению в виде программы.
Датчик тока тягового электродвигателя обеспечивает измерение фактических значений параметров электрического тока.
Датчик линейной скорости вращения тягового электродвигателя обеспечивает измерение скорости, с которой движется подвижной состав.
Датчик тока и датчик линейной скорости вращения тягового электродвигателя подключены к обмоткам тягового электродвигателя.
Датчик напряжения обеспечивает измерение напряжения контактной сети, питающей тяговый электродвигатель, и подключен к вторичной обмотке трансформатора тяговой подстанции.
При помощи вышеперечисленных функциональных элементов внутри основного контура сформированы три контура обеспечивающих реализацию алгоритмов управления током тягового электродвигателя, а именно:
- контур, регулирующий величину отклонения тока;
- контур, учитывающий влияние нелинейности кривой намагничивания тягового электродвигателя;
- контур, учитывающий влияние изменения напряжения контактной сети.
Контур, регулирующий величину отклонения тока, сформирован задающим устройством, устройством сравнения, определяющим рассогласование, регулятором отклонения, устройством сравнения, суммирующим управляющие воздействия, устройством управления, ВИП, выпрямителем возбуждения, обмотками тягового электродвигателя, датчиком тока и фильтром, усредняющим значение тока за полупериод.
Регулятор отклонения сформирован двумя звеньями и устройством сравнения, преобразующим сигналы от звеньев в управляющие воздействия. Одно из звеньев выступает в качестве пропорционально интегрирующего (ПИ1-звено), а другое в качестве звена, обеспечивающего гибкую обратную связь (ОС1-звено).
Выход задающего устройства подключен ко входу устройства сравнения, определяющего рассогласование. Выход устройства сравнения, определяющего рассогласование, подключен ко входу звена ПИ1 регулятора отклонения. Выход звена ПИ1 подключен ко входу устройства сравнения, преобразующего сигналы от звеньев ПИ1 и ОС1 в управляющие воздействия, а его выход подключен ко входу устройства сравнения, суммирующего управляющие воздействия. Выход устройства сравнения, суммирующего управляющие воздействия, подключен ко входу устройства управления. Выход устройства управления подключен ко входу ВИП и выпрямителя возбуждения. Выходы ВИП и выпрямителя возбуждения подключены к обмоткам тягового электродвигателя. К обмоткам тягового электродвигателя подключен датчик тока, выход которого подключен ко входу фильтра, усредняющего значение тока за полупериод. Выходы фильтра подключены ко входу устройства сравнения, определяющего рассогласование, а также подключен ко входу ОС1 звена регулятора отклонения. Выход ОС1 звена подключен ко входу, устройства сравнения, преобразующего сигналы от звеньев в управляющие воздействия.
Контур, регулирующий величину отклонения тока, работает следующим образом.
Задающий элемент, который представлен рукояткой контроллера машиниста, вводит в систему заданное значение тока iз. Фактическое значение тока i определяется датчиком тока. Измеренное значение тока (сигнал i') с выхода датчика тока подается на фильтр, усредняющий значение тока i' за полупериод. Устройство сравнения определяет рассогласование Δi между заданным iз усредненным за полупериод в фильтре значением тока i'ср и передает его в регулятор отклонения на звено ПИ1.
Звено ПИ1 преобразует входной сигнал Δi в сигнал x'1 в соответствии с заложенным в нем законом управления - передаточной функцией W1(p):

Передаточная функция W1(p) соответствует двум изодромным звеньям:

с коэффициентом усиления kп и постоянной времени Ти,
Закон управления (2) придает контуру, регулирующему величину отклонения тока, астатизм второго порядка, что повышает качество управления в установившемся режиме работы контура, обеспечивая нулевые установившиеся ошибки по положению (по величине тока i) и по скорости (по скорости изменения тока di/dt), а также структурную устойчивость контура.
Звено ОС1 включено в цепь обратной связи и реализует так называемую отрицательную гибкую обратную связь (ГОС), охватывающую всю разомкнутую систему. Введение в систему такой ГОС обеспечивает снижение влияния нелинейности и нестационарности объекта регулирования, улучшая тем самым качество управления в переходных режимах.
Передаточная функция W2(p) этого звена была найдена в результате решения задачи синтеза линеаризованной системы по условию выполнения требований к качеству управления в переходном режиме работы САУ, а также обеспечение необходимых запасов устойчивости в виде:

Значения коэффициента усиления обратной связи kос, а также постоянных времени Т1 Т3 и Т4 в последующем были уточнены в процессе решения задачи оптимизации параметров регуляторов отклонения и возмущения на модели контура, учитывающей все нелинейные зависимости ее устройств.
Сигнал x''1 с выхода звена ПИ1 обратной связи вычитается в устройстве сравнения, входящем в состав регулятора отклонения, из сигнала x'1 с выхода звена ОС1.
Это воздействие x1 далее подается на устройство управления, которое вырабатывает импульсы α0, α03, αр, αβ и αв, открытия тиристоров выпрямительно-инверторного преобразователя (ВИП) 8 и выпрямителя возбуждения в режиме рекуперации, являющегося исполнительным устройством и выполняющим плавное изменение напряжения uк на обмотках тяговых электродвигателей 9 (объектов управления). Под действием этого напряжения изменяется ток i тягового электродвигателя.
Этот ток, датчиком тока, преобразуется в сигнал i'. Поскольку подача импульсов α0, α03, αр, αβ и αв, в ВИП осуществляется только один раз за полупериод питающего напряжения, то и управление выполняется по осредненной величине i'cp за тоже время. Поэтому сигнал i' поступает на вход фильтра, где выполняется интегрирование мгновенных значений фактического тока за полупериод с последующим делением на постоянную времени фильтра.
Контур, учитывающий влияние нелинейности кривой намагничивания тягового электродвигателя сформирован задающим устройством, устройством сравнения, суммирующим управляющие воздействия, устройством управления, ВИП, выпрямителем возбуждения, обмотками тягового электродвигателя, датчиком тока, датчиком линейной скорости вращения тягового электродвигателя, фильтром, усредняющим значение тока за полупериод и функциональным преобразователем.
Выход задающего устройства подключен ко входу устройства управления. Выход устройства управления подключен ко входу ВИП и выпрямителя возбуждения. Выходы ВИП и выпрямителя возбуждения подключены к обмоткам тягового электродвигателя. К обмоткам тягового электродвигателя подключен датчик тока, выход которого подключен ко входу фильтра, усредняющего значение тока за полупериод. Также к обмоткам тягового электродвигателя подключен датчик линейной скорости вращения тягового электродвигателя, выход которого подключен ко входу функционального преобразователя. Выход фильтра, усредняющего значение тока за полупериод, также подключен ко входу функционального преобразователя. Выход функционального преобразователя подключен ко входу устройства сравнения, суммирующего управляющие воздействия.
Контур, учитывающий влияние нелинейности кривой намагничивания тягового электродвигателя, работает следующим образом.
Для снижения влияния основной нелинейности в виде кривой намагничивания тягового электродвигателя в функциональную схему основного контура вводится дополнительная положительная обратная связь по ЭДС (е) тяговых электродвигателей. Поскольку измерение величины е на работающем двигателе не представляется возможным, то ее определение выполняется косвенным путем в функциональном преобразователе. На вход этого блока поступают текущие значения тока i'ср полученные датчиком тока и усредненные в фильтре, и скорости ν', полученной датчиком линейной скорости вращения тягового электродвигателя, после чего вычисляется ЭДС двигателей:

где се - электромашинная постоянная, (В⋅с)/(Вб⋅м);
ν - линейная скорость вращения тягового электродвигателя, м/с;
Ф=ƒ(i) - магнитный поток, Вб.
Напряжение uк на зажимах тягового электродвигателя на 80-90% уравновешивается его ЭДС е. При обычной структуре контура управления током угол αр, получаемый на выходе устройства управления, пропорционален величине uк. Введение положительной обратной связи по ЭДС эквивалентно тому, что αр пропорционален, гораздо меньшей величине напряжения uк - е, что обеспечит повышение быстродействия контура управления током.
Контур, учитывающий влияние изменения напряжения контактной сети, сформирован: контактной сетью с трансформатором тяговой подстанции, датчиком напряжения, фильтром, усредняющим значение напряжения за полупериод, регулятором возмущения, устройством сравнения, суммирующим управляющие воздействия, устройством управления, ВИП, выпрямителем возбуждения и обмотками тягового электродвигателя.
Регулятор возмущения сформирован двумя звеньями, и устройством сравнения, преобразующим сигналы от звеньев в управляющие воздействия. Каждое из звеньев выступает в качестве пропорционально-дифференцирующего (ПД) звена.
Датчик напряжения подключен к вторичной обмотке трансформатора тяговой подстанции. Выход датчика напряжения подключен ко входу фильтра, усредняющего значение напряжения за полупериод. Выходы фильтра, усредняющего значение напряжения за полупериод подключены ко входам ПД-звеньев. Выходы каждого из ПД-звеньев подключены ко входу устройства сравнения, преобразующего сигналы от ПД-звеньев в управляющее воздействие. Выход устройства сравнения, преобразующего сигналы от ПД-звеньев в управляющее воздействие, подключен ко входу устройства сравнения, суммирующего управляющие воздействия, выход которого подключен ко входу устройства управления. Выход устройства управления подключен ко входу ВИП и выпрямителя возбуждения. Выходы ВИП и выпрямителя возбуждения подключены к обмоткам тягового электродвигателя.
Контур, учитывающий влияние изменения напряжения контактной сети, работает следующим образом.
Питание ВИП осуществляется от вторичной обмотки трансформатора тяговой подстанции с напряжением u2тр. При движении электровоза, а также вследствие процессов коммутации на других электровозах, питающихся от данной тяговой подстанции, величина u2тр изменяется. Для учета влияния ее изменения на работу основного контура введен контур, учитывающий влияние изменения напряжения контактной сети. Датчик напряжения определяет величину uq пропорциональную напряжению u2тр, после чего она поступает на вход фильтра, усредняющего значение напряжения за полупериод, для получения значения напряжения uqср. Сигнал uqср является входной величиной для регулятора возмущения, формирующего управляющее воздействие х3 по пропорционально-дифференцирующему (ПД) закону. Такой регулятор формирует управляющее воздействие х3, пропорциональное возмущению х'3 и производной от возмущения с замедлением х''3, формируемых в ПД-звеньях регулятора. Передаточная функция такого регулятора имеет вид:

где kп - коэффициент усиления ПД-звена, реализующего пропорциональную часть регулятора возмущения возмущению;
Tд - постоянная времени ПД-звена, реализующего дифференцирующую часть регулятора возмущения.
В установившемся режиме регулятор отклонения работает как пропорциональный регулятор, но при изменении входного сигнала uqср к выходному сигналу регулятора добавляется сигнал, соответствующий скорости изменения входного сигнала. При скачке входного сигнала uqср выходное напряжение также скачком меняется, а затем плавно уменьшается до kп⋅uqcp. Сигналы х'3 и х''3 суммируются в устройстве сравнения, входящем в состав регулятора возмущения, и образуют управляющее воздействие х3 регулятора возмущения, которое в устройстве сравнения суммируется с величинами х1 и х2, получаемыми соответственно от регулятора отклонения, и от функционального преобразователя, образуя сигнал х.
Способ автоматического управления током тяговых двигателей электроподвижного состава предназначен для реализации на базе микропроцессорной техники в виде программного кода. Поэтому законы управления по отклонению и возмущению должны быть представлены в области времени. При этом передаточную функцию изодромного звена (2) можно заменить системой из двух дифференциальных уравнений:
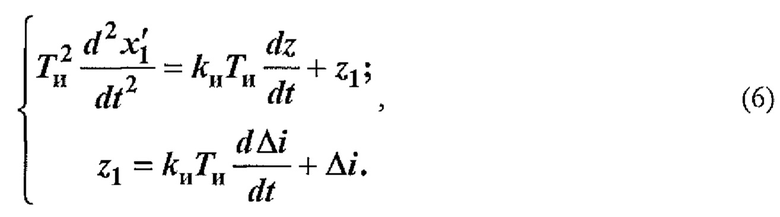
где Z - промежуточная переменная, определяемая вторым уравнением системы (6).
Передаточную функцию звена гибкой обратной связи (3) можно представить в виде следующей системы дифференциальных уравнений:
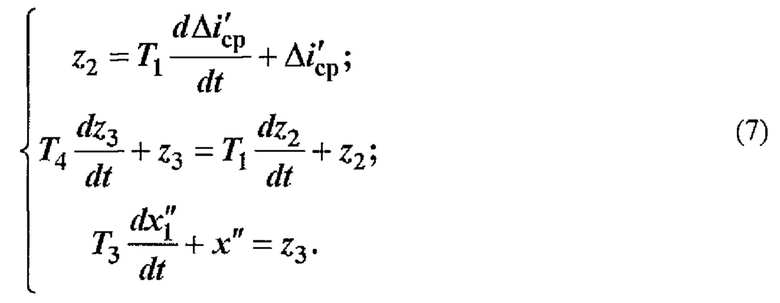
И, наконец, передаточную функцию регулятора возмущения можно представить в виде одного дифференциального уравнения:

Для полного описания основного контура, состоящего из регуляторов отклонения и возмущения системы уравнений (6), (7) и (8) необходимо дополнить нелинейным уравнением (4) функционального преобразователя и уравнениями устройств сравнения:


Решая численным способом дифференциальные уравнения (6)-(8) совместно с уравнениями (4), (9) и (10) при изменении входных сигналов Δi, Δi'cp, ν' и uqср можно найти управляющее воздействие x, в соответствие с которым управляющее устройство формирует сигналы α0, α03, αр, αβ и αв, управления тиристорными преобразователями ВИП.
Для вычисления выходных параметров регуляторов упи[(i+1)Тп], yос[(i+1)Tк], (где k=1, 2, 3) и упд[(i+1)Tд], соответствующие звеньям Wпи(p), Wос(р) и Wпд(р). На каждом шаге i+1 работы контроллера целесообразно использовать какой-либо метод численного интегрирования дифференциальных уравнений, не требующий понижения их порядка и перехода к форме Коши.
Изобретение может быть выполнено из известных материалов с помощью известных средств, что свидетельствует о его соответствии критерию патентоспособности «промышленная применимость».
Изобретение характеризуется ранее неизвестной из уровня техники совокупностью существенных признаков, отличающейся тем, что при измерении фактических значений параметров электрического тока измерительным устройством, осуществляется получение значений параметров силы электрического тока, фильтром усредняются значения силы электрического тока, регулятором отклонения осуществляется формирование коррекционного воздействия с учетом полученных на вход разности между значениями параметров заданного электрического тока и усредненным значением силы электрического тока, полученным устройством сравнения, а также усредненным значением силы электрического тока, полученным регулятором отклонения, дополнительно осуществляется измерение скорости вращения тягового электрического двигателя, функциональным преобразователем вводится положительная обратная связь по ЭДС тягового электрического двигателя с учетом, полученных на вход скорости вращения тягового электрического двигателя и усредненного значения силы электрического тока, дополнительно устройством измерения осуществляется измерение величины напряжения электрического тока вторичной обмотки трансформатора тяговой подстанции, фильтром усредняются значения величины напряжения электрического тока вторичной обмотки трансформатора тяговой подстанции, регулятором возмущения осуществляется формирование коррекционного воздействия с учетом полученных на вход усредненного значения величины напряжения электрического тока вторичной обмотки трансформатора тяговой подстанции, дополнительным устройством сравнения осуществляется получение коррекционного воздействия от регулятора отклонения, положительной обратной связи по ЭДС от функционального преобразователя и коррекционного воздействия от регулятора возмущения и определение величины управляющего воздействия на устройство управления. Определение рассогласования между заданным и фактическим значениями тока, и формирование на его основе коррекционного воздействия при помощи регулятора отклонения, позволяет придать основному контуру астатизм второго порядка и снизить величину перерегулирования, а также уменьшить время регулирования, повышая тем самым точность автоматического управления током тяговых электродвигателей. Ввод в способ по изобретению положительной обратной связи по ЭДС позволяет уменьшить величину импульса αР, который, как правило, пропорционален напряжению uк на зажимах тягового электродвигателя, до меньшей величины uк-е, за счет чего обеспечивается повышение быстродействия контура. Учет изменения величины напряжения контактной сети и формирование на основе этого изменения коррекционного воздействия, при помощи регулятора возмущения, позволяет повысить быстродействие основного контура и снизить влияние нестационарности объекта регулирования на показатели качества управления током тяговых электродвигателей.
Благодаря этому обеспечивается достижение технического результата, заключающегося в повышении эффективности автоматического управления током тяговых электродвигателей подвижного состава, тем самым повышается качество автоматического управления током тяговых электродвигателей подвижного состава
Изобретение обладает ранее неизвестной из уровня техники совокупностью существенных признаков, что свидетельствует о его соответствии критерию патентоспособности «новизна».
Из уровня техники известен способ автоматического управления током тяговых электродвигателей подвижного состава, включающий ввод параметров электрического тока с задающего устройства, регистрацию введенных параметров электрического тока устройством управления, передачу электрического тока с заданными параметрами на тяговый электродвигатель, измерение датчиком тока фактических значений параметров электрического тока тягового электродвигателя и сравнение его в устройстве управления с заданными параметрами электрического тока.
Однако из уровня техники не известен способ автоматического управления током тяговых электродвигателей по настоящему изобретению, в которых осуществляется регулирование отклонения величины тока, с помощью контура обладающего второй степенью астатизма, а также осуществляется учет влияния нелинейности кривой намагничивания тягового электродвигателя и учет изменения величины напряжения контактной сети.
Ввиду этого изобретение соответствует критерию патентоспособности «изобретательский уровень».
Изобретение поясняется следующими фигурами.
Фиг. 1 - Функциональная схема контура управления током тяговых электродвигателей.
Фиг. 2 - Блок-схема алгоритма контура, регулирующего величину отклонения тока (словесное описание).
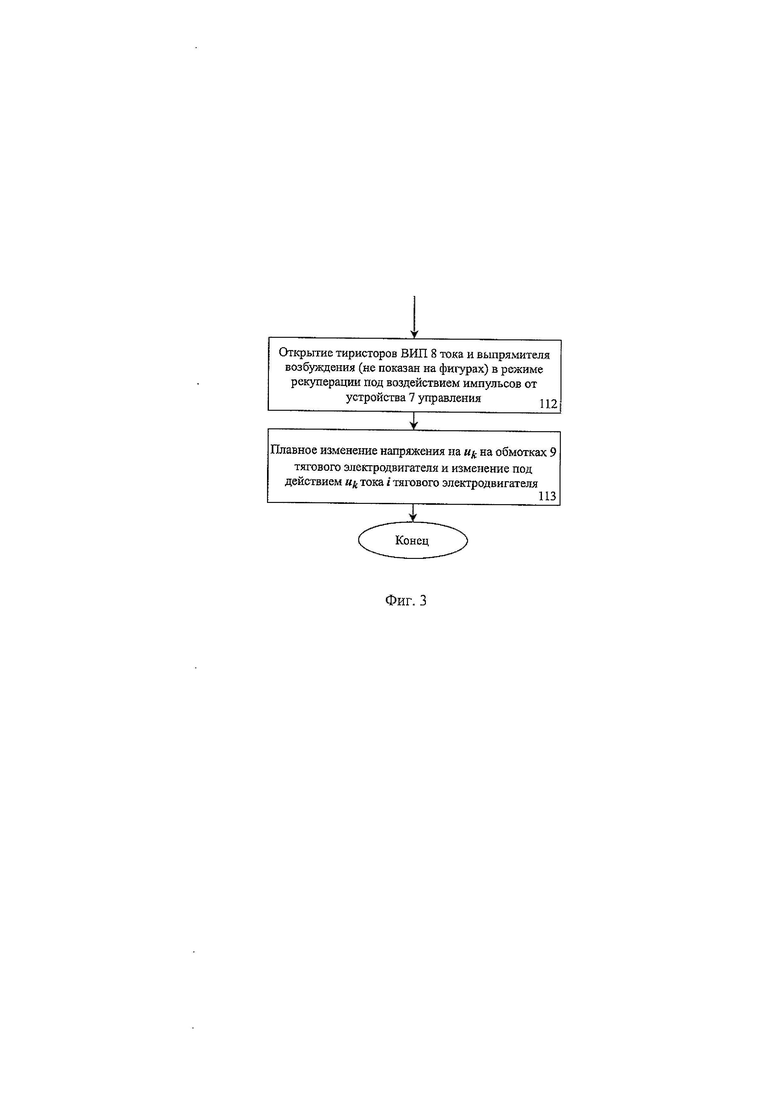
Фиг. 3 - Блок-схема алгоритма контура, регулирующего величину отклонения тока (словесное описание, продолжение).
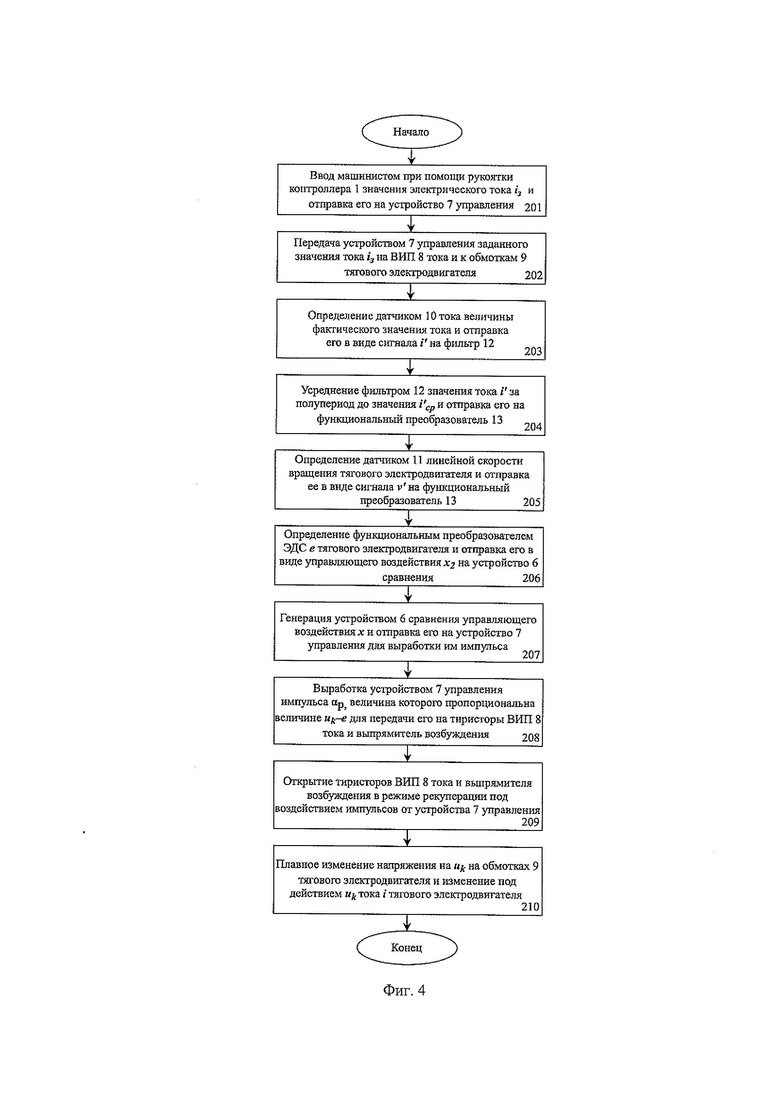
Фиг. 4 - Блок-схема алгоритма контура, учитывающего влияние нелинейности кривой намагничивания (словесное описание).
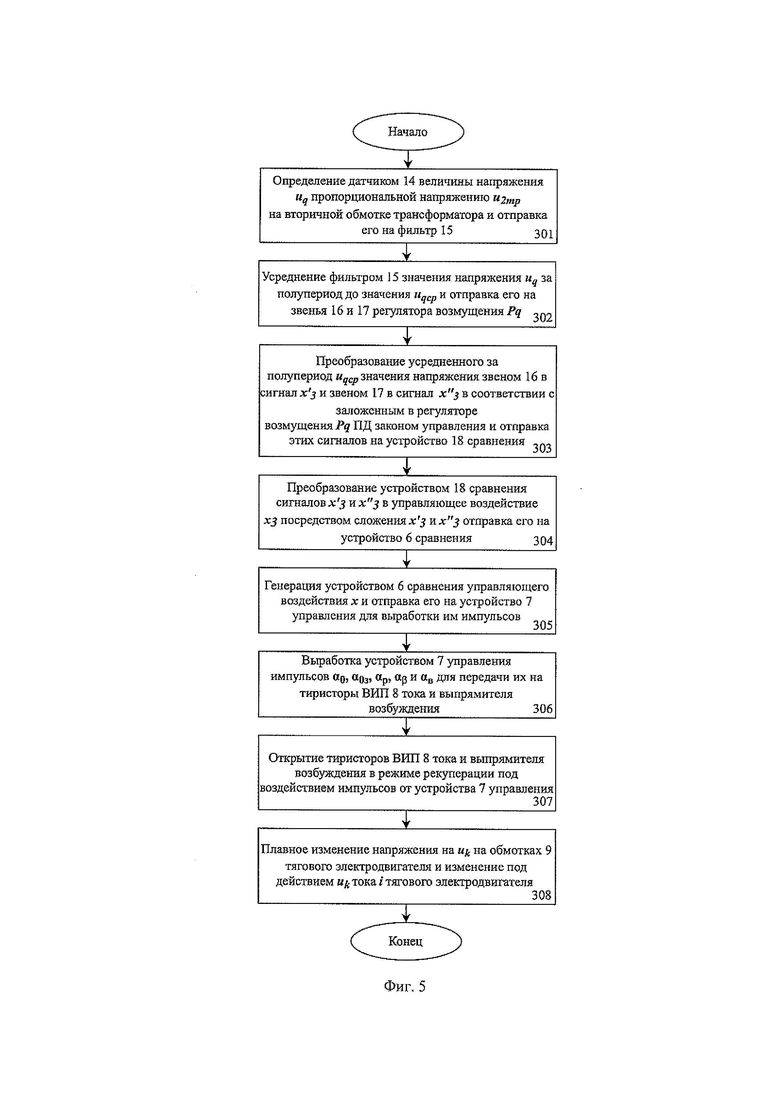
Фиг. 5 - Блок-схема алгоритма контура, учитывающего влияние изменения напряжения контактной сети (словесное описание).
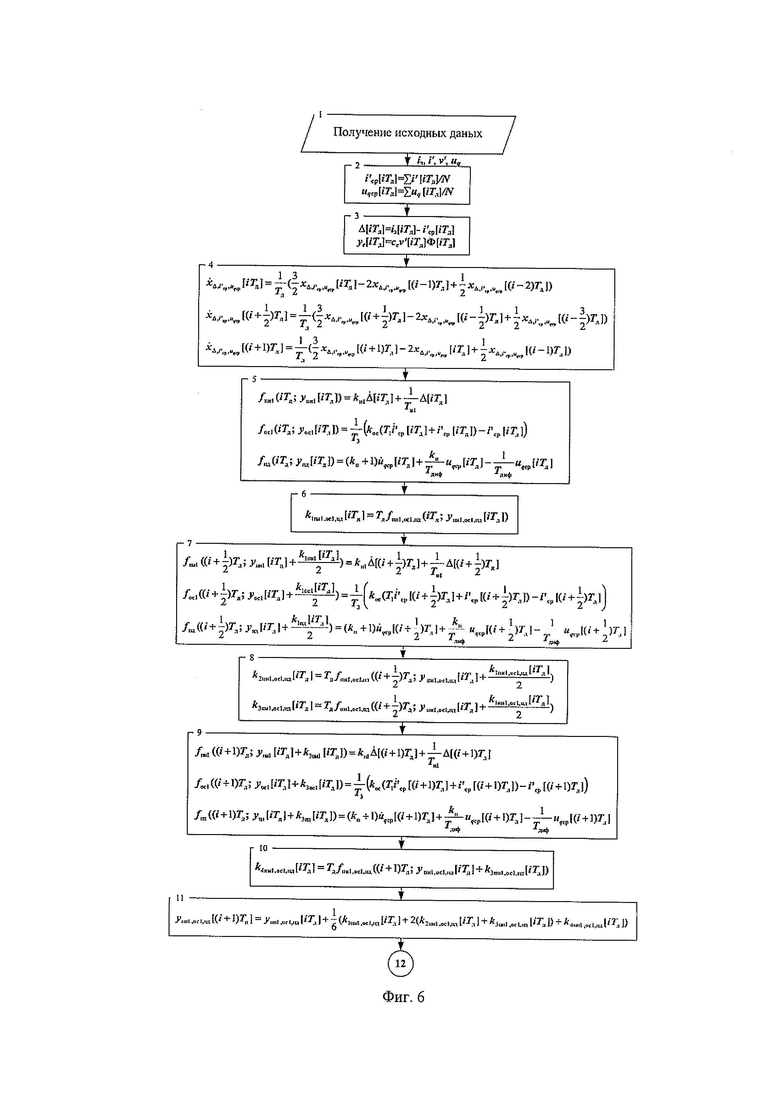
Фиг. 6 - Алгоритм способа автоматического управления током тяговых электродвигателей подвижного состава (формульное описание).
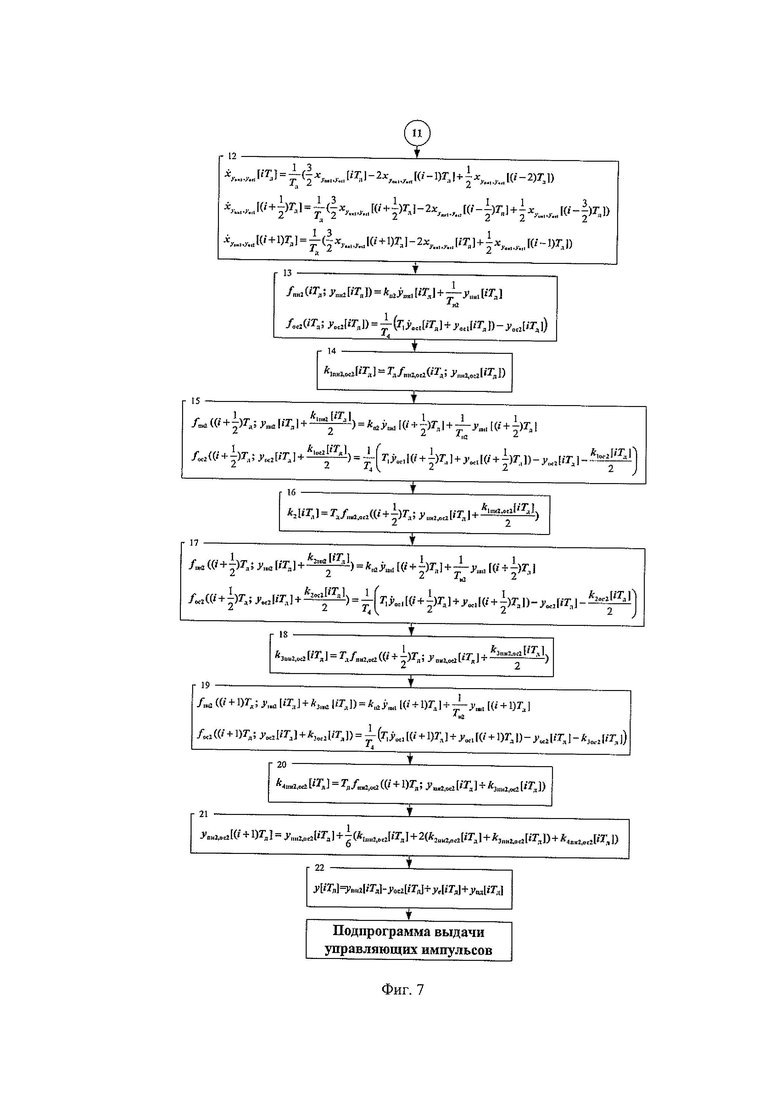
Фиг. 7 - Алгоритм способа автоматического управления током тяговых электродвигателей подвижного состава (формульное описание, продолжение).
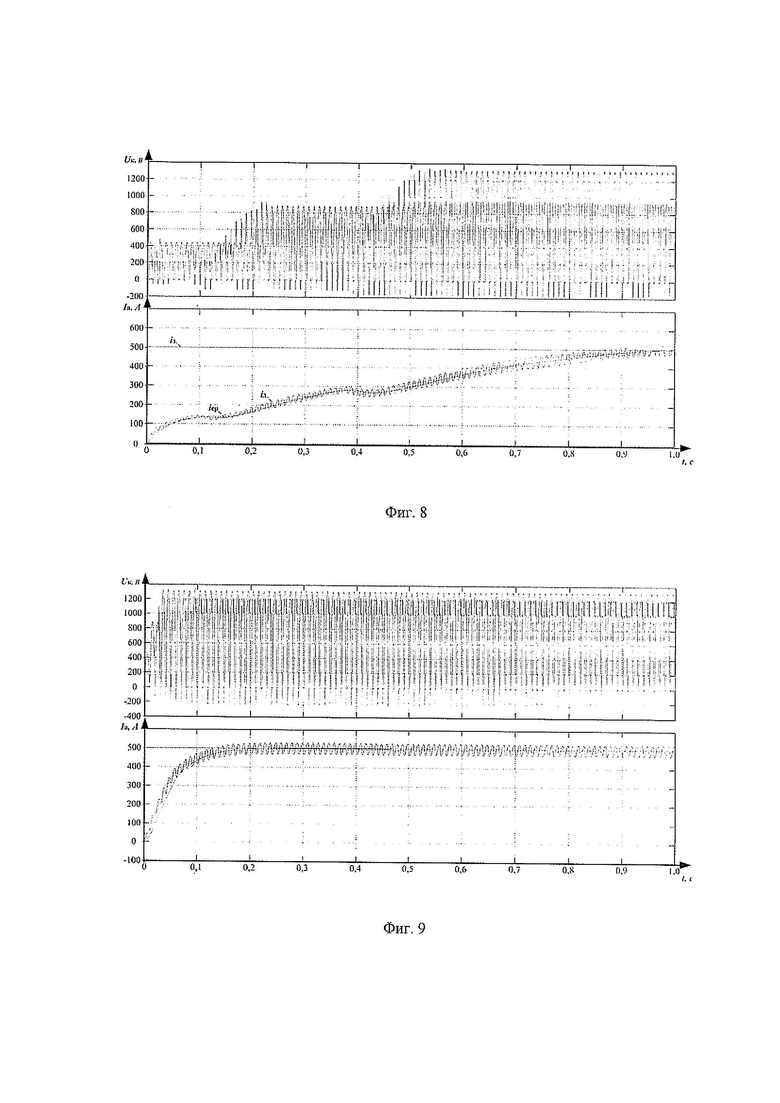
Фиг. 8 - Результаты моделирования работы тягового электродвигателя по типовому способу автоматического управления током тяговых электродвигателей (осциллограмма).
Фиг. 9 - Результаты моделирования работы тягового электродвигателя по способу автоматического управления током тяговых электродвигателей по изобретению (осциллограмма).
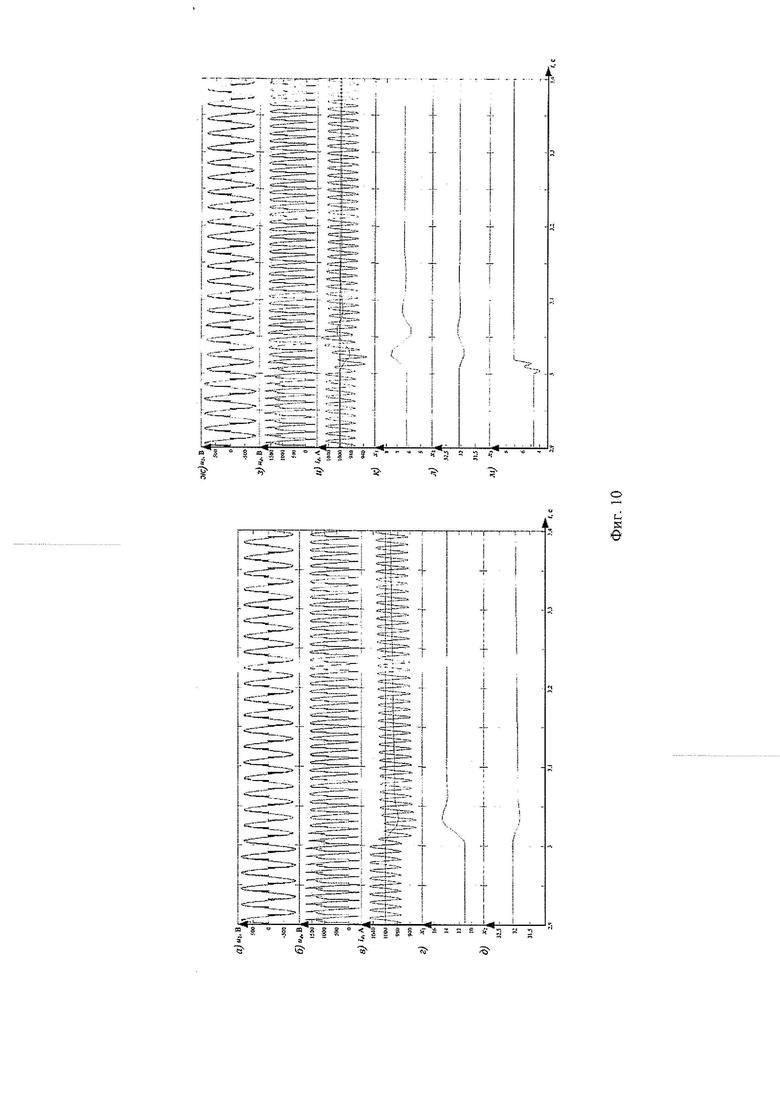
Фиг. 10 - Сравнение работы тягового электродвигателя при скачке напряжения при различных способах управления током тяговых электродвигателей (осциллограммы).
Для иллюстрации возможности реализации и более полного понимания сути изобретения ниже представлен вариант его осуществления, который может быть любым образом изменен или дополнен, при этом настоящее изобретение ни в коем случае не ограничивается представленным вариантом.
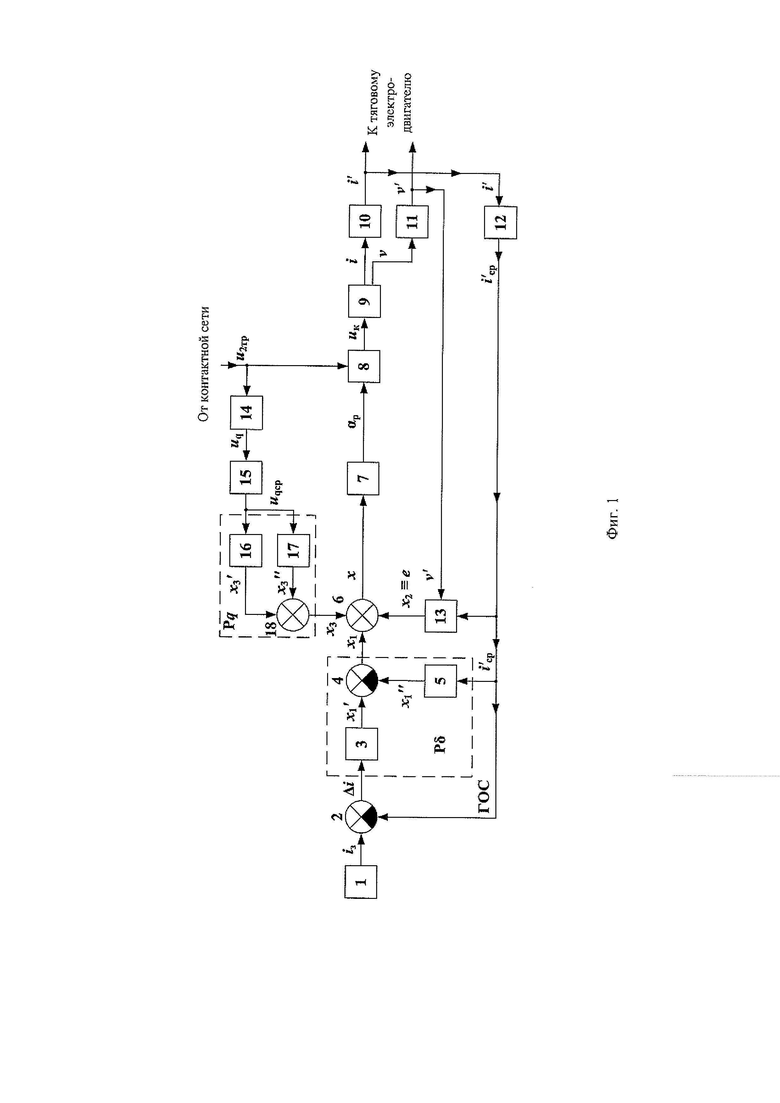
Функциональная схема контура автоматического управления током тяговых электродвигателей представлена на Фиг. 1 и содержит:
контактную сеть (не показана на фигурах), задающее устройство, выполненное в виде рукоятки контроллера 1 машиниста, устройство 2 сравнения для определения рассогласования;
регулятор отклонения Рδ, содержащий звенья 3 и 5, которые преобразуют входящие значения тока в сигналы, а также устройство 4 сравнения, преобразующее сигналы от звеньев 3 и 5 в управляющие воздействия, при этом звено 3 выступает в качестве пропорционально-интегрирующего звена (ПИ1), а звено 5 в качестве звена обеспечивающего гибкую обратную связь (ОС1);
устройство 6 сравнения суммирующее управляющие воздействия, устройство 7 управления служащее для выработки импульсов открытия тиристоров, ВИП 8 тока, выпрямитель возбуждения (не показан на фигурах) обмотки 9 тягового электродвигателя, датчик 10 тока, датчик 11 линейной скорости вращения тягового электродвигателя, фильтр 12 усредняющий значение тока за полупериод, функциональный преобразователь 13 определяющий величину ЭДС, датчик 14 напряжения, фильтр 15 усредняющий напряжение за полупериод;
регулятор возмущения Pq, содержащий звенья 16 и 17, которые преобразуют входящие значения напряжения в сигналы, а также устройство 18 сравнения, преобразующее сигналы от звеньев 16 и 17 в управляющие воздействия, при этом звенья 16 и 17 выступают в качестве пропорционально-дифференцирующих (ПД) звеньев.
Ко входу устройства 2 сравнения, подключены выход рукоятки контроллера 1 машиниста и выход фильтра 12. Выход устройства 2 сравнения подключен ко входу регулятора отклонения Рδ, а именно ко входу звена 3. Ко входу звена 5 подключен выход фильтра 12. Выходы звеньев 3 и 5 подключены ко входу устройства 4 сравнения, выход которого подключен ко входу устройства 6 сравнения. Выход устройства 6 сравнения подключен ко входу устройства 7 управления, выходы которого подключены ко входу ВИП 8 тока и выпрямителю возбуждения (не показан на фигурах). Контактная сеть подключена ко входу ВИП 8 тока. Выходы ВИП 8 и выпрямителя возбуждения подключены к обмоткам 9 тягового электродвигателя. К тяговому электродвигателю подключены датчик 10 тока и датчик И линейной скорости вращения. Выход датчика 10 тока подключен ко входу фильтра 12. Выход датчика 11 линейной скорости тягового электродвигателя подключен ко входу функционального преобразователя 13, к которому также подключен выход фильтра 12. Выход функционального преобразователя 13 подключен ко входу устройства 6 сравнения. Датчик 14 напряжения подключен к контактной сети. Выход датчика напряжения подключен к фильтру 15, выход которого подключен к регулятору возмущения Pq, а именно ко входам звеньев 16 и 17. Выходы звеньев 16 и 17 подключены к устройству 18 сравнения. Выход устройства 18 сравнения подключен ко входу устройства 6 сравнения.
Способ автоматического управления током тяговых электродвигателей подвижного состава реализуется за счет параллельного выполнения алгоритмов трех основных контуров.
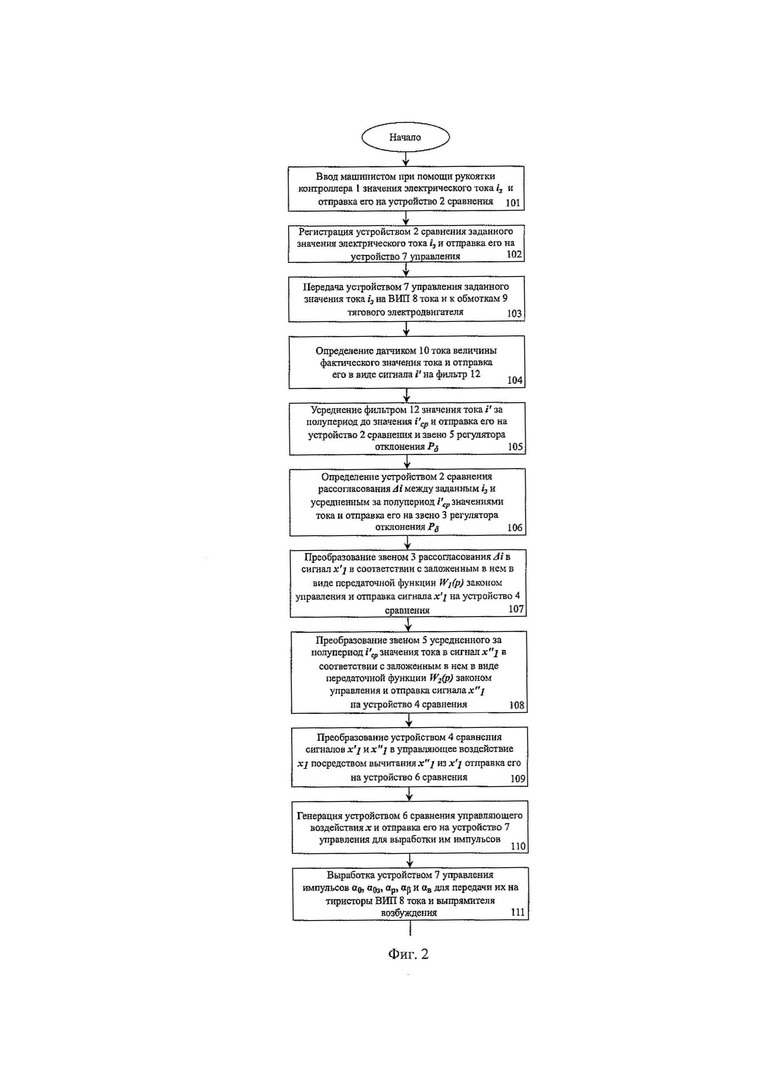
Алгоритм контура, регулирующего величину отклонения тока, реализуется рядом основных этапов, которые представлены блок-схемой на Фиг. 2 и Фиг. 3 и включают:
этап 101, на котором машинистом при помощи рукоятки контроллера 1 осуществляется ввод значения электрического тока электрического тока iз и отправка его на устройство 2 сравнения;
этап 102, на котором устройством 2 сравнения регистрируется заданное значение электрического тока iз;
этап 103, на котором устройством 7 управления осуществляется передача заданного значения электрического тока iз на ВИП 8 тока и к обмоткам 9 тягового электродвигателя;
этап 104, на котором датчиком тока 10 определяется величина фактического значения тока и отправка его в виде сигнала i' на фильтр 12;
этап 105, на котором фильтром 12 осуществляется усреднение значения тока i' за полупериод до значения i'ср, и отправка этого значения на устройство 2 сравнения и звено 5 регулятора отклонения Pδ;
этап 106, на котором устройством 2 сравнения осуществляется определение рассогласования Δi между заданным iз и усредненным за полупериод i'cp значениями тока и отправка его на звено 3 регулятора отклонения Рδ;
этап 107, на котором звеном 3 осуществляется преобразование рассогласования Δi в сигнал x'1 в соответствии с заложенным в нем в виде передаточной функции W1(p) законом управления и отправка сигнала x'1 на устройство 4 сравнения;
этап 108, на котором звеном 5 осуществляется преобразование усредненного за полупериод i'c значения тока в сигнал x''1 в соответствии с заложенным в нем в виде передаточной функции W2(p) законом управления и отправка сигнала x''1 на устройство 4 сравнения;
этап 109, на котором устройством 4 сравнения осуществляется преобразование сигналов x'1 и х''1 в управляющее воздействие xi посредством вычитания x''1 из x'1 и отправка его на устройство 6 сравнения;
этап 110, на котором устройством 6 сравнения формируется управляющее воздействие х отправка его на устройство 7 управления для выработки им импульсов;
этап 111, на котором устройством 7 управления осуществляется выработка импульсов α0, α03, αр, αβ и αв, для передачи их на тиристоры выпрямительно-инверторного преобразователя (ВИП) 8 и выпрямителя возбуждения (не показан на фигурах);
этап 112, на котором осуществляется открытие тиристоров ВИП 8 тока и выпрямителя возбуждения (не показан на фигурах) под воздействием импульсов от устройства 7 управления;
этап 113, на котором осуществляется плавное изменение напряжения uk на обмотках 9 тягового электродвигателя и изменение под действием uk тока i тягового электродвигателя.
Алгоритм контура, учитывающего влияние нелинейности кривой намагничивания реализуется рядом основных этапов, которые представлены блок-схемой на Фиг. 4 и включают:
этап 201, на котором машинистом при помощи рукоятки контроллера 1 осуществляется ввод значения электрического тока iз и отправка его на устройство 7 управления;
этап 202, на котором устройством 7 управления осуществляется передача заданного значения электрического тока iз на ВИП 8 тока и к обмоткам 9 тягового электродвигателя;
этап 203, на котором датчиком тока 10 определяется величина фактического значения тока и осуществляется отправка его в виде сигнала i' на фильтр 12;
этап 204, на котором фильтром 12 осуществляется усреднение значения тока i' за полупериод до значения i'cp, и отправка этого значения на функциональный преобразователь 13;
этап 205, на котором датчиком тока 11 определяется линейная скорость вращения тягового электродвигателя и осуществляется отправка ее в виде сигнала ν' на функциональный преобразователь 13;
этап 206, на котором функциональным преобразователем определяется ЭДС е тягового электродвигателя и осуществляется отправка его в виде управляющего воздействия х2 на устройство 6 сравнения;
этап 207, на котором устройством 6 сравнения формируется управляющее воздействие х и осуществляется отправка его на устройство 7 управления для выработки им импульса;
этап 208, на котором устройством 7 управления осуществляется выработка импульса αр, величина которого пропорциональна величине uk-е для передачи его на тиристоры ВИП 8 и выпрямителя возбуждения (не показан на фигурах);
этап 209, на котором осуществляется открытие тиристоров ВИП 8 тока и выпрямителя возбуждения (не показан на фигурах) под воздействием импульсов от устройства 7 управления;
этап 210, на котором осуществляется плавное изменение напряжения uk на обмотках 9 тягового электродвигателя и изменение под действием uk тока i тягового электродвигателя.
Алгоритм контура, учитывающего влияние изменения напряжения контактной сети реализуется рядом основных этапов, которые представлены блок-схемой на Фиг. 5 и включают:
этап 301, на котором датчиком тока 14 определяется величина напряжения uq пропорциональной напряжению u2mp на вторичной обмотке трансформатора и отправка его на фильтр 15;
этап 302, на котором фильтром 15 осуществляется усреднение значения тока uq за полупериод до значения uqср и отправка этого значения на звенья 16 и 17 регулятора возмущения Pq;
этап 303, на котором звеньями 16 и 17 осуществляется преобразование усредненного за полупериод uqcp значения напряжения в сигналы х'3 и х''3 в соответствии с заложенным в регуляторе возмущения Pq пропорционально-дифференцирующим законом управления и отправка этих сигналов на устройство 18 сравнения;
этап 304, на котором устройством 18 сравнения осуществляется преобразование сигналов х'3 и х''3 в управляющее воздействие х3 посредством сложения х'3 и х''3 и отправка его на устройство 6 сравнения;
этап 305, на котором устройством 6 сравнения формируется управляющее воздействие x отправка его на устройство 7 управления для выработки им импульсов;
этап 306, на котором устройством 7 управления осуществляется выработка импульсов α0, α03, αр, αβ и αв, для передачи их на тиристоры ВИП 8 и выпрямителя возбуждения (не показан на фигурах);
этап 307, на котором осуществляется открытие тиристоров ВИП 8 тока и выпрямителя возбуждения (не показан на фигурах) под воздействием импульсов от устройства 7 управления;
этап 308, на котором осуществляется плавное изменение напряжения uk на обмотках 9 тягового электродвигателя и изменение под действием uk тока i тягового электродвигателя.
Изобретение работает следующим образом.
На фиг. 6 и 7 представлен способ автоматического управления током тяговых электродвигателей подвижного состава. В качестве входной информации алгоритм получает заданное значение тока iз от контроллера машиниста, а также фактические значения тока i', линейной скорости ν' вращения тягового электродвигателя и напряжения вторичной обмотки трансформатора uq от датчиков 10, 11 и 14 соответственно (блок 1). В блоке 2 вычисляются средние значения фактического тока i'cp и напряжения uqcp за полупериод питающего напряжения. Затем в блоке 3 определяются рассогласование Δ между заданным iз и средним фактическим i'cp токами, а также управляющее воздействие уе, пропорциональное ЭДС тяговых двигателей. В блоке 4 для шагов i, i+1/2, i+1 определяются производные сигналов Δ, i'cp и uqср, являющиеся входными сигналами для ПИ1-, OC1-звеньев регулятора отклонения Рδ и ПД-звеньев регулятора возмущения Pq. Затем в блоках 5-10 последовательно вычисляются правые части дифференциальных уравнений и коэффициенты k1, k2, k3, k4 для каждого из ПИ1-, ОС1- и ПД-звеньев. На их основе в блоке 11 определяются выходные сигналы yпи1, yос1 и упд. Полученные величины упи1, уос1 являются входными сигналами для ПИ2-, ОС2-звеньев регулятора отклонения Рδ, по которым в блоке 12 определяются производные аналогично блоку 4. Далее в блоках 13-20 последовательно вычисляются правые части ДУ и коэффициенты k1, k2, k3, k4 для ПИ2-, ОС2-звеньев. На их основе в блоке 21 определяются выходные сигналы yпи2, уос2. Наконец в блоке 22 вычисляется общее управляющие воздействие у. После чего у передается в подпрограмму формирования импульсов управления αр ВИП 8.
На фиг. 8 представлены результаты моделирования работы подвижного состава по типовому способу автоматического управления током тяговых электродвигателей, а на фиг. 9 представлены результаты моделирования работы подвижного состава по способу автоматического управления током тяговых электродвигателей по изобретению. При этом подвижной состав находится вблизи тяговой подстанции, а начальные в обоих случаях одинаковые - скорость движения подвижного состава ν=50 км/ч, заданное значение тока iз изменяется скачком от 0 до 500 А.
При типовом способе управления с ПИ-регулированием по отклонению показатели качества управления составляют: время регулирования tp=0,94 с; перерегулирование σ=0 (фиг. 8). Реализация способа с двойным ПИ-регулированием, отрицательной гибкой обратной связью, положительной обратной связью по ЭДС и контуром, учитывающим влияние изменения напряжения контактной сети, обеспечила улучшение качества процессов управления (фиг. 9): время регулирования уменьшилось до tp=0,17 с, а перерегулирование составило σ=0,3%.
На фиг. 10 представлено сравнение работы электродвигателя при скачке питающего напряжения только с регулированием по отклонению (фиг. 10, а-д) и комбинированных методов управления (фиг. 10, ж-м). Подвижной состав также находится вблизи тяговой подстанции, и работает со следующими начальными условиями: скорость движения подвижного состава ν=60 км/ч, заданное значение тока iз=1000 А, напряжение на тяговой подстанции падает скачком на 10% (фиг. 10, а и ж). В первом случае для урегулирования по отклонению (фиг. 10, г и д) требуется значительное время для стабилизации фактического тока тяговых двигателей tp=0,725 с (фиг. 10, в). В то время как управляющее воздействие х3 ПД-регулятора (фиг. 10, м) позволяет мгновенно реагировать на появившееся возмущение - 0,118 с (см. фиг. 10, и).
Выполненные моделирование, а также сравнение показали, что автоматическое управление током тяговых электродвигателей подвижного состава с регулированием отклонений тока с астатизмом 2-го порядка и гибкой обратной связью в контуре, регулирующем отклонение тока, положительной обратной связью по ЭДС, а также с регулированием возмущения обеспечивают высокое качество управления и быстродействие системы автоматического управления током тяговых электродвигателей подвижного состава.
Таким образом обеспечивается достижение технического результата, заключающегося в повышении эффективности способа автоматического управления током тяговых электродвигателей подвижного состава, тем самым повышается его качество.
Изобретение относится к области железнодорожного транспорта, а именно к способу автоматического управления током тяговых электродвигателей подвижных составов переменного тока. Сущность изобретения заключается в способе автоматического управления током тяговых электродвигателей подвижного состава, при котором обеспечивается наиболее точное корректирование управляющего воздействия, для отправки его на обмотки тягового электродвигателя и плавного изменения на нем величины тока и напряжения. Технический результат, на достижение которого направлено изобретение, заключается в повышении эффективности автоматического управления током тяговых электродвигателей подвижного состава. 10 ил.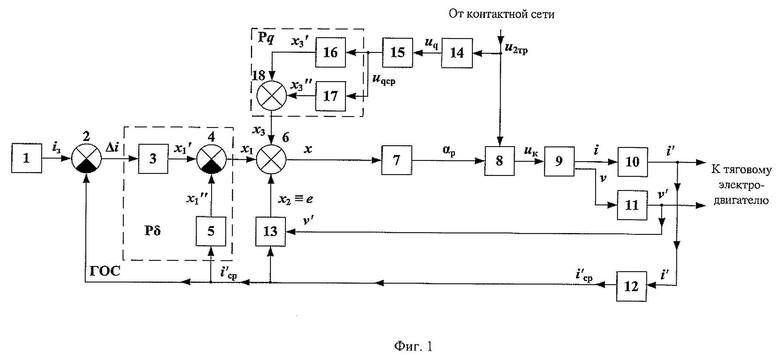
Способ автоматического управления током тяговых электродвигателей подвижного состава, включающий ввод параметров электрического тока с задающего устройства, регистрацию устройством сравнения введенных параметров электрического тока, передачу электрического тока устройством управления с заданными параметрами на тяговый электрический двигатель, измерение измерительным устройством фактических значений параметров электрического тока, определение устройством сравнения разности между значениями параметров заданного электрического тока и измеренными фактическими значениями параметров электрического тока, отличающийся тем, что при измерении фактических значений параметров электрического тока измерительным устройством, осуществляется получение значений параметров силы электрического тока, фильтром усредняются значения силы электрического тока, регулятором отклонения осуществляется формирование коррекционного воздействия с учетом полученных на вход разности между значениями параметров заданного электрического тока и усредненным значением силы электрического тока, полученным устройством сравнения, а также усредненным значением силы электрического тока, полученным регулятором отклонения, дополнительно осуществляется измерение скорости вращения тягового электрического двигателя, функциональным преобразователем вводится положительная обратная связь по ЭДС тягового электрического двигателя с учетом полученных на вход скорости вращения тягового электрического двигателя и усредненного значения силы электрического тока, дополнительно устройством измерения осуществляется измерение величины напряжения электрического тока вторичной обмотки трансформатора тяговой подстанции, фильтром усредняются значения величины напряжения электрического тока вторичной обмотки трансформатора тяговой подстанции, регулятором возмущения осуществляется формирование коррекционного воздействия с учетом полученных на вход усредненного значения величины напряжения электрического тока вторичной обмотки трансформатора тяговой подстанции, дополнительным устройством сравнения осуществляется получение коррекционного воздействия от регулятора отклонения, положительной обратной связи по ЭДС от функционального преобразователя и коррекционного воздействия от регулятора возмущения и определение величины управляющего воздействия на устройство управления.
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2015 |
|
RU2588400C1 |
| Способ регулирования электрической передачи тепловоза | 2021 |
|
RU2766021C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ ТЕПЛОВОЗА | 1995 |
|
RU2076810C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ТЯГОВОЙ ПЕРЕДАЧИ МАНЕВРОВОГО ТЕПЛОВОЗА | 2010 |
|
RU2437778C1 |
| RU 90592 U1, 10.01.2010 | |||
| US 5376868 A1, 27.12.1994 | |||
| US 20050116474 A1, 02.06.2005. | |||

