Область техники
Изобретение относится к области радиосвязи и, в частности, к области радиочастотной идентификации. Во многих случаях необходимо определение местоположения объекта, связанного с передатчиком сигнала. Способы определения местоположения, использующие оценку расстояния, пройденного сигналом, по времени прибытия сигнала, хорошо известны специалистам. В этих способах местоположение передатчика сигнала определяется по времени прибытия сигнала в несколько пространственно разнесенных точек.
Уровень техники
В системе слежения за предметами по заявке США US 6150921 А использован способ определения местоположения передатчика сигнала по времени прибытия сигнала через измерение времени максимального отклика при корреляционной обработке сигнала. Этот способ обеспечивает высокую точность и дальность определения местоположения, но сложен в реализации.
В системе определения местоположения, адаптированной для условий многолучевого распространения радиоволн, по патенту США US RE 36791 E использован "способ определения местоположения передатчика сигнала по времени прибытия сигнала через измерение времени переднего фронта сигнала, который, ввиду запаздывания отраженных лучей, обусловлен только прямым лучом. В этом способе для определения местоположения передатчика сигнала полезно используется незначительная часть энергии одного элемента сигнала, успевающая поступить по прямому лучу до прихода фронта отраженных лучей. Повышение точности определения местоположения в условиях многолучевого распространения радиоволн достигается ценой уменьшения дальности определения местоположения.
Наиболее близкими к настоящему изобретению являются устройство, система и способ определения местоположения радиочастотной метки по заявке WO 2007041153 A1. В устройстве и системе используется способ определения местоположения передатчика сигнала по времени прибытия сигнала через измерение времени характерной точки на интервале одного элемента сигнала. Через измерение времени такой же характерной точки на интервале последующего элемента сигнала определяется новое местоположение передатчика сигнала. В этом способе для каждого определения местоположения передатчика сигнала полезно используется энергия одного элемента сигнала, что не обеспечивает желаемой точности и дальности определения местоположения.
Система определения местоположения радиочастотной идентификационной метки по заявке WO 2007041153 А1 включает несколько антенн, несколько приемных трактов, каждый приемный тракт связан с одной из нескольких антенн для обработки сигнала, принятого через соответствующую антенну, схему измерения времени характерных точек сигнала, соединенную с каждым из приемных трактов, а также схему вычисления местоположения передатчика сигнала по времени прибытия сигнала.
Раскрытие изобретения
В способе определения местоположения передатчика сигнала по времени прибытия сигнала в соответствии с настоящим изобретением местоположение передатчика сигнала вычисляется по времени прибытия сигнала через 1) измерение циклического времени характерной точки на интервале элемента сигнала для множества элементов сигнала, 2) вычисление среднего арифметического результатов измерений и 3) использование среднего арифметического в качестве времени прибытия сигнала. В этом способе для определения местоположения передатчика сигнала полезно используется значительная часть полной энергии сигнала, что повышает точность и увеличивает дальность определения местоположения при более простой реализации по сравнению со способом, использующим корреляционную обработку сигнала.
Система определения местоположения передатчика сигнала по времени прибытия сигнала в соответствии с настоящим изобретением содержит несколько антенн, несколько приемных трактов, каждый приемный тракт связан с одной из нескольких антенн для обработки сигнала, принятого через соответствующую антенну, схему измерения времени, соединенную с каждым из приемных трактов, или несколько схем измерения времени, отдельно соединенных каждая с одним из нескольких приемных трактов, для измерения времени характерных точек сигнала, а также схему вычисления местоположения передатчика сигнала по времени прибытия сигнала, и отличается от наиболее близкой из известных систем определения местоположения по времени прибытия сигнала тем, что содержит по одной схеме суммирования с накоплением результатов измерений для каждой схемы измерения времени характерных точек сигнала, при этом каждая схема суммирования с накоплением результатов измерений по входу соединена отдельно с одной из схем измерения времени характерных точек сигнала, а по выходу связана со схемой вычисления местоположения передатчика сигнала по времени прибытия сигнала.
Краткое описание чертежей
На фиг.1 приведен пример осуществления изобретения система определения местоположения передатчика сигнала по времени прибытия сигнала.
На фиг.2 приведена структурная схема считывателя, объединяющего по одной повторяющиеся части системы определения местоположения передатчика сигнала по времени прибытия сигнала в одном варианте осуществления изобретения.
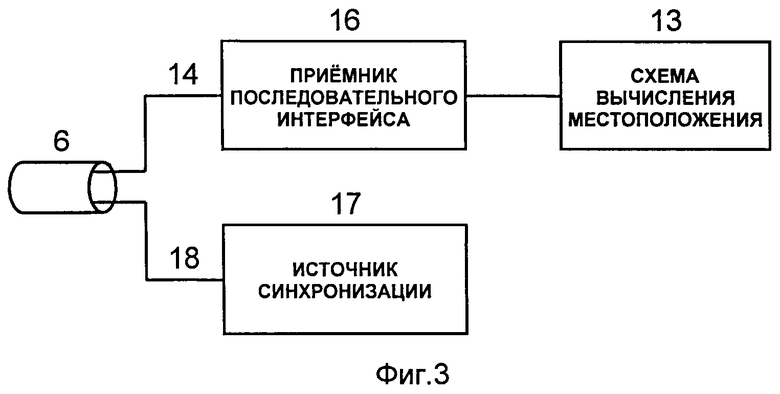
На фиг.3 приведена структурная схема контроллера, объединяющего не повторяющиеся части системы определения местоположения передатчика сигнала по времени прибытия сигнала в одном варианте осуществления изобретения.
На фиг.4 приведена блок-схема процесса в одном варианте осуществления способа определения местоположения передатчика сигнала по времени прибытия сигнала.
Осуществление изобретения
В описании вариантов осуществления изобретения изложены многочисленные конкретные детали. Тем не менее, следует понимать, что варианты изобретения могут быть осуществлены без этих конкретных деталей. В других случаях известные схемы, структуры и технологии не были показаны подробно, чтобы не затруднять понимание этого описания.
Фразы «вариант осуществления», «пример осуществления», «один вариант осуществления», «различные варианты осуществления» и др. показывают, что вариант(ы) осуществления изобретения, описанный таким образом, может включать в себя частные признаки, структуры или характеристики, но не каждый вариант обязательно включает в себя частные признаки, структуры или характеристики. Кроме того, некоторые варианты могут иметь некоторые, все или ни одного из признаков, описанных в других вариантах.
В описании и формуле изобретения использованы термины «связаны» и «соединены», а также их производные. Следует понимать, что эти термины использованы не как синонимы друг друга. В некоторых случаях предпочтение отдано термину «соединены», чтобы показать, что два или более элементов могут находиться в непосредственном контакте друг с другом. Термин «связаны» использован, чтобы показать, что два или более элементов сотрудничают или взаимодействуют друг с другом, но они могут быть или не быть в непосредственном контакте.
В рамках этого документа термин «передатчик сигнала» может относиться к любому источнику сигнала с цифровой модуляцией, как: радиочастотная идентификационная метка, радиостанция, терминал сотовой связи и т.д., содержащему электронную схему для генерации и цифровой модуляции несущей частоты сигнала и антенну.
Различные варианты осуществления изобретения могут быть реализованы в одной или любой другой комбинации аппаратных средств, прошивки и программного обеспечения. Изобретение также может быть реализовано в виде инструкций, содержащихся в продукте, или на машинных носителях информации, которая может быть прочитана и выполнена одним или несколькими процессорами для выполнения операций, описанных в настоящем документе. Машинные носители информации могут включать в себя любые механизмы для хранения, передачи и/или получения информации в форме, читаемой машиной (например, компьютером). Машинные носители информации могут включать в себя такие носители, и не только их, как постоянная память, оперативная память, магнитный диск, оптические носители, флэш-память. Машинные носители информации могут также включать материальную среду, через которую электрические, оптические, акустические и другие формы распространяемых сигналов, переносящих инструкцию, могут проходить, например, антенны, оптическое волокно, коммуникационные интерфейсы и другие.
В одних вариантах осуществления изобретения, пространственно разнесенные части системы определения местоположения передатчика сигнала по времени прибытия сигнала могут быть связаны посредством проводных интерфейсов с симметричными или коаксиальными линиями, а в других вариантах осуществления изобретения, - посредством радио-интерфейсов.
Одни варианты осуществления изобретения могут относиться к определению местоположения передатчика сигнала путем приема сигнала через несколько антенн и приемных трактов с измерением времени прихода сигнала, использованием разностей времени прихода для расчета взаимных разностей в расстоянии между передатчиком сигнала и соответствующими антеннами и триангуляции разностей в расстоянии для вычисления местоположения передатчика сигнала относительно известных опорных точек. Другие варианты осуществления изобретения могут относиться к определению местоположения передатчика сигнала, совмещенного с приемным трактом ответных сигналов, путем приема сигнала через несколько антенн и приемных трактов, передачи ответных сигналов и приема их приемным трактом ответных сигналов, используя время прихода сигнала и время прихода ответных сигналов для расчета расстояний между передатчиком сигнала и соответствующими антеннами и вычисления местоположения передатчика сигнала относительно известных опорных точек методом триангуляции дуг.
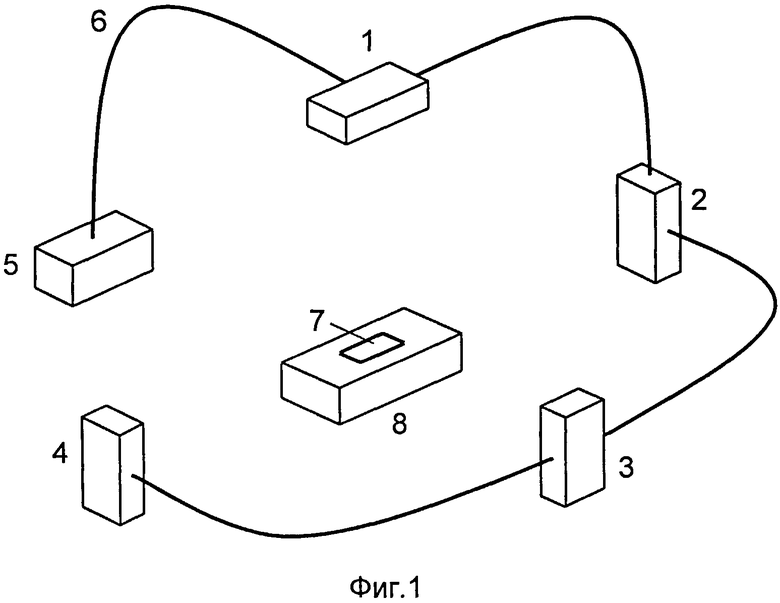
Фиг.1 показывает пример расположения системы определения местоположения объекта с прикрепленным передатчиком сигнала, радиочастотной идентификационной меткой, в соответствии с вариантом осуществления изобретения. Система включает конструктивные единицы - считыватели 1, 2, 3 и 4, содержащие каждый по одной из повторяющихся функциональных частей системы, и контроллер 5, содержащий неповторяющиеся функциональные части системы. Все конструктивные единицы системы соединены отрезками электрического кабеля 6. В некоторых вариантах контроллер 5 соединен с каждым считывателем отдельным отрезком электрического кабеля 6, в некоторых из этих вариантов отдельные отрезки электрического кабеля 6 имеют одинаковую длину, чтобы вносить одинаковую задержку в передаваемый по ним сигнал синхронизации. В других вариантах конструктивные единицы соединены отрезками электрического кабеля 6 друг за другом, как лампочки в гирлянде. В вариантах с разной длиной электрического кабеля от контроллера до разных считывателей, могут использоваться различные технологии, компенсирующие разные задержки сигнала синхронизации.
В примере на фиг.1 показаны четыре считывателя 1, 2, 3 и 4 со встроенными антеннами, расположенные приблизительно в ортогональных направлениях от области, в которой радиочастотные идентификационные метки, как ожидается, будут расположены, хотя другие варианты могут использовать другие места размещения считывателей и другое их количество. На фиг.1 показана также радиочастотная идентификационная метка 7, прикрепленная к объекту 8. Выявляя наличие и местоположение радиочастотной идентификационной метки 7, система может определить наличие и местоположение объекта 8.
Когда сигнал передается радиочастотной идентификационной меткой 7, время, в которое сигнал принимается разными считывателями, может несколько отличаться, из-за разного времени распространения сигнала до антенн считывателей. Разное время распространения, в свою очередь, может быть обусловлено разницей в расстоянии между меткой и соответствующими антеннами. Разность времени приема поэтому может быть использована для расчета взаимной разницы в расстоянии между меткой и каждой приемной антенной. Применяя технику триангуляции, эту разницу в расстоянии можно использовать для расчета местоположения радиочастотной идентификационной метки относительно местоположения различных приемных антенн, при условии, что взаимное расстояние и взаимное направление каждой антенны от других антенн известно.
Используя методы, основанные на сравнении разности расстояний (а не самих расстояний) от известных ориентиров, поверхность расположения радиочастотной идентификационной метки 7 может быть однозначно определена с помощью двух считывателей 1, 2, расположение линии, лежащей на этой поверхности - с помощью трех считывателей 1, 2, 3 и расположение точки на этой линии - с помощью четырех считывателей 1, 2, 3 и 4. Таким образом, четыре считывателя могут быть использованы для однозначного определения местоположения метки как точки в 3-мерном пространстве, по отношению к четырем считывателям (антеннам считывателей). Хотя эта конфигурация и показана на фиг.1, другие варианты могут использовать три или даже два считывателя для однозначного определения местоположения радиочастотной идентификационной метки на поверхности или на линии, соответственно, если этого достаточно для решения прикладной задачи. С другой стороны, более четырех считывателей могут быть применены, если местоположение должно быть определено с большей точностью, так как дополнительная информация может быть использована для уменьшения некоторых неточностей, вызванных такими факторами, как большой размер антенны, отклонение времени и т.д.
На фиг.2 показана структурная схема считывателя, а на фиг.3 - структурная схема контроллера, иллюстрирующие распределение по конструктивным единицам функциональных частей системы определения местоположения в варианте осуществления изобретения. В состав считывателя включены по одной повторяющиеся функциональные части системы, как: антенна 9, приемный тракт 10, схема измерения времени 11 и схема суммирования с накоплением 12, каскадно-соединенные в порядке перечисления. Неповторяющаяся функциональная часть системы, схема вычисления местоположения 13, в этом варианте осуществления изобретения включена в состав контроллера. Для осуществления связи множества схем суммирования с накоплением 12 со схемой вычисления местоположения 13 используется линия данных 14 в составе электрического кабеля 6. Для сопряжения с линией данных 14 схемы суммирования с накоплением 12 в состав считывателя включен передатчик последовательного интерфейса 15, а для сопряжения с линией данных 14 схемы вычисления местоположения 13 в состав контроллера включен приемник последовательного интерфейса 16.
В описываемом варианте осуществления изобретения используются отдельные схемы измерения времени 11 для каждого из приемных трактов 10 в каждом считывателе. Для синхронизации временных шкал схем измерения времени используется общий источник синхронизации 17, который в данном варианте осуществления изобретения входит в состав контроллера. Связь источника синхронизации 17 со схемами измерения времени 11 осуществляется по линии синхронизации 18 в составе электрического кабеля 6.
Для обеспечения возможности определения местоположения множества радиочастотных идентификационных меток, метки различаются по их идентификаторам, выделяемым считывателем из принимаемых сигналов меток с помощью экстрактора данных 19, соединенного по входу с выходом приемного тракта 10, а по выходу - с входом передатчика последовательного интерфейса 15. Данные о времени прибытия сигнала метки и данные с идентификатором той же метки передаются передатчиком последовательного интерфейса 15 по линии данных 14 на контроллер, где те и другие данные выделяются из последовательного сигнала линии данных 14 приемником последовательного интерфейса 16 и поступают на схему вычисления местоположения 13.
При поступлении сигнала метки через антенну 9 и приемный тракт 10 на схему измерения времени 11, она начинает выделять характерные точки на интервалах элементов сигнала, например, фронты двухсторонне ограниченного выходного сигнала детектора. Функция схемы измерения времени может осуществляться счетчиком-таймером и схемой захвата его состояния. Счетчики-таймеры со схемой захвата входят в состав периферийных модулей многих микроконтроллеров. Частота тактового сигнала счетчика-таймера и количество его разрядов выбираются так, чтобы длительность периода работы счетчика-таймера совпадала с длительностью элементов сигнала метки. Такой же период или кратно больший должен иметь сигнал источника синхронизации 17. По сигналу источника синхронизации подстраивается фаза тактов счетчика-таймера и фаза состояний счетчика-таймера.
Захваченные состояния счетчика-таймера отражают измеренные значения времени характерных точек элементов сигнала по циклической шкале времени с периодом цикла, равным длительности элемента сигнала. Если за время передачи сигнала местоположение метки не изменяется, то в результате измерений могли бы быть получены одинаковые значения циклического времени характерных точек элементов сигнала. Однако из-за воздействия многих факторов и, прежде всего, шумов приемного тракта, циклическое время характерной точки элемента сигнала является случайной величиной и ее значения, полученные в разных измерениях, могут отличаться друг от друга.
Из теории ошибок известно, что наиболее вероятным значением случайной величины является среднее арифметическое измеренных значений случайной величины. При этом дисперсия среднего арифметического меньше дисперсии случайной величины в N раз, где N - число значений случайной величины, участвующих в расчете среднего арифметического. Применительно к данной прикладной задаче это означает, что всегда можно уменьшить среднеквадратичную ошибку оценки времени прибытия сигнала, а значит, повысить точность определения местоположения передатчика сигнала, если увеличить число элементов сигнала, в которых измеряется время характерной точки, и усреднить результаты измерений.
Операцию усреднения результатов измерений выполняет схема суммирования с накоплением 12. Если число элементов сигнала N, для которых измеряется время характерной точки и суммируются результаты измерений, равно 2 в степени m, где m - целое число, то накопленное схемой суммирования с накоплением число, после отбрасывания некоторого количества младших разрядов, может быть использовано в качестве оценки времени прибытия сигнала.
Поступающие на схему вычисления местоположения 13 данные оценок времени прибытия сигнала одной и той же метки из разных считывателей используются для расчета взаимных разностей времени прибытия. Эти разности показывают, насколько ближе или дальше антенна каждого считывателя была от передатчика сигнала (т.е., от метки). Разности времени пересчитываются в разности расстояний умножением на скорость распространения сигнала в воздушной среде. Положение метки вычисляется путем решения системы триангуляционных уравнений с подстановкой известных координат опорных точек и разностей расстояний метки от опорных точек.
Ниже приведено описание процесса, реализующего способ определения местоположения передатчика сигнала по времени прибытия сигнала, в соответствии с блок-схемой на фиг.4. Процесс описан, исходя из предположения, что сигнал поступает от одного передатчика, однако подобный процесс может последовать за поступлениями сигналов от нескольких передатчиков, используя известные в настоящее время, или которые могут быть разработаны, методы обработки сигналов от нескольких передатчиков.
На шаге 20 сигнал передатчика может быть принят через несколько антенн и соответствующих приемных трактов. Следующие шаги выполняются применительно к выходам тех приемных трактов, на которых сигнал обнаруживается. Шаги 21, 22, 23 и 24 выполняются с циклическим повторением определенное количество раз в течение времени приема сигнала.
На шаге 21 ожидается появление характерных точек в принимаемом сигнале на выходах соответствующих приемных трактов. На шаге 22 производится измерение времени характерных точек сигнала на выходах соответствующих приемных трактов. На шаге 23 измеренные при последнем выполнении шага 23 значения времени характерных точек сигнала на выходах соответствующих приемных трактов суммируются с ранее накопленными суммами измеренных значений времени характерных точек сигнала за все предшествующие циклы с начала приема сигнала для определения среднего арифметического измеренных значений времени характерных точек сигнала. Предполагается, что до начала приема сигнала накопленные суммы обнулены. На шаге 24 проверяется количество циклов суммирований, выполненных с начала приема сигнала и, если количество циклов суммирований сравнялось с предопределенным числом N, выполняется переход к шагу 25, иначе выполняется возврат к шагу 21. Предопределенное число N целесообразно выбирать равным двум в степени m, где m - целое число.
На шаге 25 выполняется вычисление местоположения передатчика сигнала с использованием оценок времени прибытия сигнала через различные антенны и приемные тракты, в качестве которых применяются накопленные за N циклов суммы измеренных значений времени характерных точек сигнала после отбрасывания некоторого количества младших разрядов и с учетом дискретности времени, соответствующей младшему из оставшихся разрядов.
Возможность точного и дальнего определения местоположения передатчика сигнала описанным способом при простой реализации может быть полезно использована в различных областях человеческой деятельности. Задача радиочастотной идентификации с определением местоположения меток и связанных с ними предметов в реальном времени актуальна для автоматизированных производств, складов, хранилищ. Применение аналогичных систем для отслеживания перемещения шахтеров, горнорабочих, спасателей, пожарных, а также обслуживающего персонала метро, протяженных тоннелей, закрытых помещений опасных производств и т.д. позволит повысить безопасность их труда. Преимуществом данной технологии является возможность определения местоположения любого передатчика модулированного сигнала, даже в том случае, когда эта возможность не закладывалась при его разработке. Описанным способом может определяться местоположение аналоговых или цифровых радиостанций, а также абонентских терминалов сотовых сетей связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АНТИКОЛЛИЗИОННОЙ РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634308C2 |
| ЛОКАЛЬНАЯ СИСТЕМА МОНИТОРИНГА МЕСТОПОЛОЖЕНИЯ И ПАРАМЕТРОВ ДВИЖЕНИЯ СПОРТСМЕНОВ И СПОРТИВНЫХ СНАРЯДОВ | 2018 |
|
RU2691947C1 |
| ВЫСОКОТОЧНАЯ СИСТЕМА ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ | 2017 |
|
RU2657185C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ВОЗБУЖДЕНИЯ ПРИЕМОПЕРЕДАЮЩЕЙ МЕТКИ | 2012 |
|
RU2578587C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ВОЗБУЖДЕНИЯ ПРИЕМОПЕРЕДАЮЩЕЙ МЕТКИ | 2015 |
|
RU2617719C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ СКЛАДСКИХ ГРУЗОВЫХ ПЛАТФОРМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2470316C1 |
| СИСТЕМА МОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2010 |
|
RU2422641C1 |
| ЛОКАЛЬНАЯ СИСТЕМА СЛЕЖЕНИЯ ЗА ПОДВИЖНЫМИ ОБЪЕКТАМИ И ТЕРМОЗАЩИЩЕННЫЙ ТРАНСПОНДЕР ДЛЯ НЕЁ | 2020 |
|
RU2736795C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ХРАНЕНИЯ ПРЕДМЕТА С ИСПОЛЬЗОВАНИЕМ РАДИОЧАСТОТНЫХ МЕТОК | 2011 |
|
RU2444025C1 |
| СПОСОБ ОХРАНЫ КОНТРОЛИРУЕМЫХ ЗОН И СИСТЕМА ОХРАННОЙ СИГНАЛИЗАЦИИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2828053C1 |

Изобретение относится к области радиочастотной идентификации. Достигаемый технический результат изобретения - повышение точности и дальности определения местоположения передатчика сигнала. Способ и система определения местоположения передатчика сигнала по времени прибытия сигнала используют отдельную обработку сигнала, принятого через несколько антенн и приемных трактов, ожидание характерных точек принятого сигнала, измерение времени появления характерных точек принятого сигнала, суммирование с накоплением для определения среднего арифметического измеренных значений времени появления характерных точек принятого сигнала и вычисление местоположения передатчика сигнала с использованием среднего арифметического измеренных значений времени появления характерных точек принятого сигнала в качестве времени прибытия сигнала. 2 н. и 1 з.п. ф-лы, 4 ил.
1. Система определения местоположения передатчика сигнала по времени прибытия сигнала, включающая несколько антенн, несколько приемных трактов, каждый приемный тракт соединен с одной из нескольких антенн для обработки сигнала, принятого через соответствующую антенну, схему выделения характерных точек на интервалах элементов принятого сигнала и измерения времени появления характерных точек сигнала, соединенную с каждым из приемных трактов, или несколько схем выделения характерных точек на интервалах элементов принятого сигнала и измерения времени появления характерных точек сигнала, каждая из которых соединена с одним из нескольких приемных трактов, а также схему вычисления местоположения передатчика сигнала по времени прибытия сигнала, отличающаяся тем, что включает по одной схеме суммирования с накоплением результатов измерений для каждой схемы выделения характерных точек на интервалах элементов принятого сигнала и измерения времени появления характерных точек сигнала, при этом вход каждой схемы суммирования с накоплением результатов измерений соединен с выходом одной из схем выделения характерных точек на интервалах элементов принятого сигнала и измерения времени появления характерных точек сигнала, а выход каждой схемы суммирования с накоплением результатов измерений связан со схемой вычисления местоположения передатчика сигнала по времени прибытия сигнала.
2. Способ определения местоположения передатчика сигнала по времени прибытия сигнала, включающий в себя прием сигнала передатчика через несколько антенн и приемных трактов, отдельную обработку сигнала, принятого каждой антенной, для определения характерных точек принятого сигнала, измерение времени появления характерных точек принятого сигнала, а также вычисление местоположения передатчика сигнала по времени прибытия сигнала, отличающийся тем, что включает измерение циклического времени появления характерной точки на интервале элемента сигнала для множества элементов сигнала, определение среднего арифметического измеренных значений циклического времени появления характерных точек принятого сигнала и использует среднее арифметическое измеренных значений циклического времени появления характерных точек принятого сигнала в качестве времени прибытия сигнала при вычислении местоположения передатчика сигнала по времени прибытия сигнала.
3. Способ по п.2, отличающийся тем, что при определении среднего арифметического измеренных значений времени появления характерных точек принятого сигнала используются только те измеренные значения времени появления характерных точек принятого сигнала, которые получены на тактовых интервалах сигнала с единственной характерной точкой.
| WO 2007041153 A1, 12.04.2007 | |||
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2234108C1 |
| RU 95122626 A, 20.02.1998 | |||
| Способ извлечения аминов из производственных сточных вод | 1948 |
|
SU76717A1 |
| US 5424746 A, 13.06.1995 | |||
| US 7046186 B2, 16.05.2006 | |||
| Устройство для забивки свай | 1961 |
|
SU146711A1 |
| JP 60014186 A, 24.01.1985. | |||

