В стационарных радиолокаторах проблемы навигационного обеспечения пеленгации целей не существует. Местоположение радиолокационной станции известно заранее с точностью, доступной геодезическим измерениям. Информация об опорных направлениях - направлении местного меридиана и ориентации плоскости местного горизонта - также определены заранее с высокой точностью. Совершенно иначе выглядит задача локации в радиолокаторах подвижных объектов воздушного, морского и наземного базирования, где необходимо сопряжение измерителей углового положения антенны и бортовых навигационных измерителей - инерциальных навигационных систем.
Изобретение относится к радиолокационным пеленгаторам, размещаемым на подвижных объектах воздушного, морского и наземного базирования.
Известны способ и устройство радиолокационного пеленгования заданного объекта визирования, включающее интегрированное антенное устройство и цифровое вычислительное устройство, предназначенные для автосопровождения заданного объекта визирования для подвижных носителей с инерциальной измерительной системой с изменяющейся ориентацией диаграмм направленности волн, излучаемых антенной, а именно поворотно-чувствительные устройства, основанные на использовании гироинерциальных датчиков сигналов пространственного перемещения подвижного носителя, (см патент РФ №2442185, МПК G01S 13/06, от 05.03.2010 г.).
Подвижный радиолокатор для пеленгования обеспечивает решение задачи формирования сигналов рассогласования по дальности и углового рассогласования, пропорциональных параметрам инерциального пеленгования заданного ОВ по дальности и по направлению в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат, по сигналам предстартовых начальных значений сферических координат заданного ОВ и наклонной дальности до заданного ОВ, по сигналам начальных условий выставки инерциального измерения параметров вектора визирования заданного ОВ и по измеренным сигналам, пропорциональным текущим значениям проекций кажущегося линейного ускорения движения и проекций вектора абсолютной угловой скорости поворота вектора визирования заданного ОВ на соответствующие оси базовой антенной системы координат, при перемещении по траектории подвижного носителя и его сближении с заданным ОВ.
Недостатками известного технического решения является невозможность определения навигационных параметров подвижного носителя и ОВ. Кроме того, техническое воплощение радиолокатора достаточно сложное, т.к. требует согласования осей датчиков углов поворота - гироскопов и акселерометров.
Расстояние от плоскости раскрыва антенны до ее оси вращения может составлять несколько дециметров. Расстояние от оси вращения локатора до бортовой инерциальной навигационной системы носителя (летательного аппарата, надводного корабля и т.д.), формирующей плоскость местного горизонта и направление местного меридиана, может составлять несколько метров. Параметры пространственного положения датчика угла поворота антенны относительно строительных осей бортовой инерциальной навигационной системы определяются на этапе технологической юстировки в процессе изготовления радиолокатора и в процессе дальнейшей эксплуатации, как правило, не корректируются. Пересчет угла поворота датчика в угол поворота плоскости антенны при больших размерах антенны осложняется внешними факторами - порывами ветра, вибрацией носителя антенны. Отсутствие учета указанных смещений плоскости раскрыва антенны и погрешностей определения параметров пространственного положения датчика угла поворота антенны относительно строительных осей бортовой инерциальной навигационной системы означает включение этих погрешностей в значения угловых положений ОВ в системе координат датчика угла поворота антенны, что ведет к пропорциональному росту ошибок определения координат цели. Дополнительно на снижении точности скажутся координатные преобразования. При дальности наблюдения цели на уровне десятков километров ошибки определения координат цели могут составить до километра. Кроме того, для одновременного измерения двух угловых координат необходимо наличие либо двух измерительных каналов, либо реализация режимов последовательного сканирования антенного полотна в горизонтальной и в вертикальной плоскостях.
Задачей, поставленной в настоящем техническом решении, является пеленгация цели по угловой координате с учетом навигационных характеристик OB, упрощение и миниатюризации устройства и повышение точности пеленгования цели - ОВ.
Для достижения поставленной задачи в подвижном радиолокаторе, содержащем антенну, соединенную с формирователем суммарного отраженного сигнала, инерциальную навигационную систему, включающую цифровое вычислительное устройство, антенну выполняют в виде полотна, в геометрическом центре которого или непосредственной близости от него установлена инерциальная навигационная система, выполненная в виде бесплатформенной инерциальной системы, радиолокатор также содержит блок фиксации максимума отраженного сигнала и формирователь выходного сигнала, при этом блок фиксации максимума отраженного сигнала содержит согласованный фильтр, вход которого соединен с формирователем суммарного отраженного сигнала, при этом выход согласованного фильтра через детектор к линии задержки, соответствующие выходы которой через умножители, задающие весовые коэффициенты, подключены через первый сумматор к схеме сравнения и через второй сумматор к схеме фиксации нуля, при этом выход схемы сравнения соединен с одним из входов схемы фиксации нуля, выход которой соединен с одним из входов формирователя выходного сигнала, остальные входы которого соединены с выходом цифрового вычислительного устройства бесплатформенной инерциальной навигационной системы, выход формирователя выходного сигнала соединен с аппаратурой потребителя.
Изобретение поясняется чертежом, где представлена структурная схема описываемого подвижного радиолокатора.
На чертеже изображены: антенное полотно 1, бесплатформенная инерциальная навигационная система (БИНС) 2, формирователь 3 суммарного отраженного сигнала, блок 4 фиксации максимума отраженного сигнала положения, содержащий согласованный фильтр 5, детектор 6, линию задержки 7, умножители 81…8к и 91…9к, сумматоры 10 и 11, схему фиксации нуля 12, схему сравнения 13, формирователь 14 выходного сигнала, соединенный с аппаратурой 15 потребителя.
В режиме обзора луч антенны равномерно перемещается по угловым направлениям в зоне ответственности. Отраженный от цели сигнал (при импульсном методе локации) представляет пачку импульсов, огибающая U(t) которой, определяется формой диаграммы направленности антенны, а длительность - временем облучения цели Тобл. Максимум огибающей будет наблюдаться в тот момент времени, когда антенна направлена на цель. Фиксируя показания угла поворота антенны относительно направления на север, определенного и хранимого в БИНС, в момент времени, когда огибающая пачки импульсов достигает максимума (в этой точке выполняется условие dU(t)/dt=0), определяют угловую координату цели, например угол азимута цели. Одновременно осуществляется измерение и фиксация второй угловой координаты той же БИНС - угла места цели относительно плоскости местного горизонта.
В основе процедуры определения угловых координат лежит взаимосвязь между различными системами координат (СК), используемыми в работе радиолокатора обнаружения цели - объекта визирования. К таким системам координат относятся:
ENU - топоцентрическая (местная географическая) СК;
Внос - система координат носителя (правая прямоугольная СК, оси которой связаны со строительными осями носителя);
Вдп - приборная СК датчика угла поворота (правая прямоугольная СК, оси которой связаны с плоскостью угла поворота).
Определение координат цели производится в вычислителе радиолокатора на основе простого матричного соотношения

где 



Малогабаритная бесплатформенная инерциальная навигационная система (БИНС) 2, представляющая моноблок, содержит лазерные гироскопы, акселерометры, блок питания и цифровой вычислитель, обеспечивающий определение угловых параметров положения и решение навигационных задач.
Система работает следующим образом.
БИНС 2, установленная на антенном полотне 1 в центре или в непосредственной близости от геометрического центра (ГЦ) полотна, обеспечивает непрерывное определение:
текущих географических координат геометрического центра (ГЦ) антенного полотна φ, λ, H;
угла между направлением географического меридиана на север и проекцией оси Х антенного полотна на горизонтальную плоскость - ψx;
углов крена и тангажа - γ и υ;
составляющих путевой скорости ГЦ антенного полотна по осям прямоугольной системы координат - WX, WY, WZ.
С выхода формирователя суммарного отраженного сигнала 3 антенны 1 на вход блока 4 фиксации максимума отраженного сигнала поступают импульсы, прошедшие согласованную обработку с помощью согласованного фильтра 5, и через детектор 6 поступают на линию задержки 7, которые запоминаются на временном интервале, равном длительности пачки. Оценка производной dU(t)/dt обеспечивается суммированием отсчетов, снимаемых с выходов со специально подобранными весовыми коэффициентами 81…8к, пропорциональными производной огибающей. Момент времени, когда антенна 1 направлена на лоцируемую цель - ОВ, отраженный сигнал принимает максимальное значение и производная огибающей будет равна нулю, определяется схемой фиксации нуля 12. По команде блока 4 фиксации максимума сигнала, поступающей в блок 14 формирователя выходного сигнала, текущие показания БИНС 2 ϕX, γ, υ, φ, λ, H, WX, WY, WZ поступают на вход вычислителя аппаратуры потребителя 15 потребителя, где производится вычисление координат цели. Чтобы исключить отсчет угловых координат по шумовой выборке, информация с БИНС считывается только при наличии полезного сигнала. Решение о его наличии принимается по накоплению отчетов с весовыми коэффициентами 91…9к, пропорциональными огибающей пачки, и сравнению накопленного сигнала шума, поступающего с антенны.
При таком построении навигационной системы матрица 
Соответственно уравнение (1) принимает вид

где 
Таким образом, точность предлагаемого устройства будет выше за счет исключения координатного преобразования 
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЛЕКСИРОВАНИЯ СИГНАЛОВ ПЕЛЕНГОВАНИЯ ОБЪЕКТА ВИЗИРОВАНИЯ ИНЕРЦИАЛЬНОГО И РАДИОЛОКАЦИОННОГО ДИСКРИМИНАТОРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2488137C2 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2019 |
|
RU2718739C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ИНЕРЦИАЛЬНОГО ПЕЛЕНГОВАНИЯ ЗАДАННОГО ОБЪЕКТА ВИЗИРОВАНИЯ И ИНЕРЦИАЛЬНЫЙ ДИСКРИМИНАТОР СИГНАЛОВ ПЕЛЕНГОВАНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2442185C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА КОМПЕНСАЦИИ ФАЗОВЫХ ИСКАЖЕНИЙ ПРИНИМАЕМЫХ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ ОБЛУЧАЕМОГО ОБЪЕКТА ВИЗИРОВАНИЯ, С ОДНОВРЕМЕННЫМ ЕГО ИНЕРЦИАЛЬНЫМ ПЕЛЕНГОВАНИЕМ И ИНЕРЦИАЛЬНЫМ АВТОСОПРОВОЖДЕНИЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2526790C2 |
| СПОСОБ ИНЕРЦИАЛЬНОГО АВТОСОПРОВОЖДЕНИЯ ЗАДАННОГО ОБЪЕКТА ВИЗИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2498193C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОРРЕКТИРУЮЩИХ ПОПРАВОК В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ | 2017 |
|
RU2654964C1 |
| Способы коррекции показаний инерциальной части радиоинерциальной системы навигации | 2023 |
|
RU2840478C2 |
Изобретение относится к радиолокационным пеленгаторам, размещаемым на подвижных объектах воздушного, морского и наземного базирования. Достигаемый технический результат - пеленгация цели по угловой координате с учетом навигационных характеристик объекта визирования, упрощение и миниатюризация радиолокатора и повышение точности пеленгования объекта визирования. Указанный результат достигается за счет того, что подвижный радиолокатор содержит антенну, инерциальную навигационную систему, включающую цифровое вычислительное устройство, при этом антенну выполняют в виде полотна, в геометрическом центре которого или непосредственной близости от него устанавливают инерциальную навигационную систему, выполненную в виде бесплатформенной инерциальной системы, кроме того, радиолокатор содержит блок фиксации максимума отраженного сигнала и формирователь выходного сигнала, при этом блок фиксации максимума отраженного сигнала содержит согласованный фильтр, вход которого соединен с формирователем суммарного отраженного сигнала, выход согласованного фильтра через детектор соединен с линией задержки, соответствующие выходы которой через умножители, задающие весовые коэффициенты, подключены через первый сумматор к схеме сравнения и через второй сумматор - к схеме фиксации нуля, при этом выход схемы сравнения соединен с одним из входов схемы фиксации нуля, выход которой соединен с одним из входов формирователя выходного сигнала, остальные входы которого соединены с выходом цифрового вычислительного устройства бесплатформенной инерциальной навигационной системы, выход формирователя выходного сигнала соединен с аппаратурой потребителя. 1 ил. 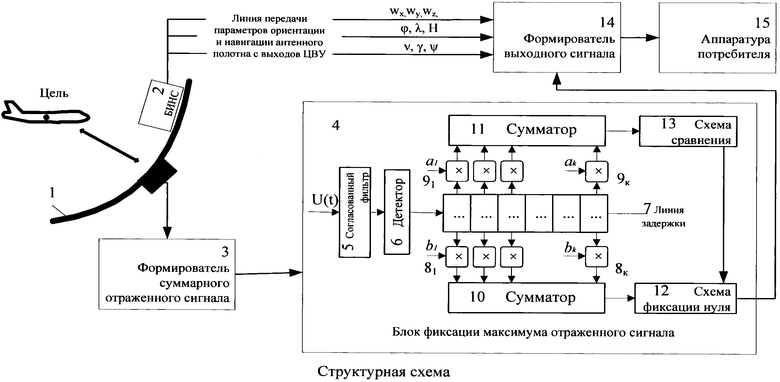
Подвижный радиолокатор, содержащий антенну, соединенную с формирователем суммарного отраженного сигнала, инерциальную навигационную систему, включающую цифровое вычислительное устройство, отличающийся тем, что антенну выполняют в виде полотна, в геометрическом центре которого или непосредственной близости от него установлена инерциальная навигационная система, выполненная в виде бесплатформенной инерциальной системы, радиолокатор также содержит блок фиксации максимума отраженного сигнала и формирователь выходного сигнала, при этом блок фиксации максимума отраженного сигнала содержит согласованный фильтр, вход которого соединен с формирователем суммарного отраженного сигнала, при этом выход согласованного фильтра через детектор соединен с линией задержки, соответствующие выходы которой через умножители, задающие весовые коэффициенты, подключены через первый сумматор к схеме сравнения и через второй сумматор - к схеме фиксации нуля, при этом выход схемы сравнения соединен с одним из входов схемы фиксации нуля, выход которой соединен с одним из входов формирователя выходного сигнала, остальные входы которого соединены с выходом цифрового вычислительного устройства бесплатформенной инерциальной навигационной системы, выход формирователя выходного сигнала соединен с аппаратурой потребителя.
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ИНЕРЦИАЛЬНОГО ПЕЛЕНГОВАНИЯ ЗАДАННОГО ОБЪЕКТА ВИЗИРОВАНИЯ И ИНЕРЦИАЛЬНЫЙ ДИСКРИМИНАТОР СИГНАЛОВ ПЕЛЕНГОВАНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2442185C2 |
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 2005 |
|
RU2298804C2 |
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1992 |
|
RU2012902C1 |
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1997 |
|
RU2124222C1 |
| СПОСОБ ЮСТИРОВКИ ПО УГЛОВЫМ КООРДИНАТАМ ПОДВИЖНОГО РАДИОЛОКАТОРА | 1992 |
|
RU2030759C1 |
| Рулевой механизм транспортного средства со встроенным усилителем | 1970 |
|
SU532332A3 |
| WO 2012143251 A1, 26.10.2012 | |||
| JP 2003202369 A, 18.07.2003 | |||
| US 20100134379 A1, 03.06.2010. | |||

