Изобретение относится к бурению наклонно-направленных скважин и строительству переходов трубопроводов различного назначения под естественными и искусственными преградами методом наклонно-направленного бурения.
Из источника «Многофункциональные наклонные буровые установки (МНБУ)» (Проспект компании Prime Vertical, с 3-5) известна система подачи бурильных труб в буровые установки компании Prime Vertical, которые содержат механизм подачи с трубным захватом. При этом механизм подачи с трубным захватом закреплен на буровом лафете, который перемещается на заданный угол забуривания перед началом бурения. Поднятие бурильных труб в зону действия механизма подачи с трубным захватом осуществляется специальным краном-манипулятором, установленным рядом с буровой установкой. С помощью крана-манипулятора осуществляется подъем и ориентация бурильных труб в трубном захвате механизма подачи бурильных труб, и только после этого происходит захват бурильной трубы и загрузка ее в буровую установку.
Недостатком известной системы подачи бурильных труб является сложность и длительность процесса загрузки бурильных труб в буровую установку, необходимость постоянного наличия крана-манипулятора на буровой площадке и управляющего им дополнительного персонала. Длительность и сложность процесса подачи бурильных труб в рабочую зону буровой установки обусловлены необходимостью закрепления каждой трубы в удерживающем устройстве крана-манипулятора, подъемом бурильной трубы к механизму подачи и позиционирования бурильной трубы в трубном захвате механизма подачи. Все эти операции ложатся на оператора крана-манипулятора и требуют от него точных действий.
Наиболее близким по технической сущности к достигаемому результату является система загрузки буровых штанг в рабочую зону буровой установки наклонно-направленного бурения (RU 2384690 C2, 16.06.2008), состоящая из манипулятора с возможностью перемещения вдоль продольной оси буровой установки, и системы отслеживания положения буровой колонны в рабочей зоне буровой установки и автоматического позиционирования манипулятора с буровой штангой. Гидравлический манипулятор закреплен на боковой поверхности бурового лафета и перемещается вместе с ним на заданный угол забуривания перед началом бурения. Известная система загрузки работает следующим образом. В исходном положении манипулятор захватывает буровую штангу и поворачивается на заданный угол для доставки буровой штанги в рабочую зону буровой установки. Система отслеживания положения буровой колонны в рабочей зоне буровой установки проверяет нахождение буровой колонны в рабочей зоне буровой установки, которое не должно превышать определенного значения для исключения аварийной ситуации в случае пересечения загружаемой буровой штаги с буровой колонной. Если величина нахождения буровой колонны в рабочей зоне буровой установки находится в пределах допустимого значения, загрузка буровой штанги продолжается до конечного положения в рабочей зоне буровой установки. Если система отслеживания зафиксирует значение нахождения буровой колонны в рабочей зоне выше допустимого, то система слежения остановит манипулятор в промежуточном (вертикальном) положении и даст команду на перемещение манипулятора с буровой штангой вдоль продольной оси бурового лафета на расстояние, обеспечивающее гарантированный зазор между нижним торцом буровой штанги и торцом буровой колонны. После этого гидравлический манипулятор завершит загрузку буровой штанги в рабочую зону буровой установки.
Недостатком известной системы является необходимость ориентации бурильной трубы в начальном положении захвата манипулятора, а именно ее наклона на угол равный углу установки бурового лафета. Для этого необходимо применять сложные накопители бурильных труб или использовать кран-манипулятор.
Технический результат, достигаемый заявленным изобретением, заключается в упрощении и ускорении процесса загрузки бурильных труб в рабочую зону буровой установки, исключении необходимости использования сложного трубного накопителя или крана-манипулятора и связанного с ним персонала на буровой площадке, и как следствие, в повышении безопасности буровых работ путем исключения нахождения персонала в травмоопасных зонах.
Указанный технический результат достигается тем, что известная система загрузки буровых штанг (бурильных труб) в рабочую зону буровой установки наклонно-направленного бурения, содержащая манипулятор, установленный с возможностью перемещения вдоль продольной оси буровой установки, систему отслеживания положения буровой колонны в рабочей зоне буровой установки наклонно-направленного бурения и автоматического позиционирования манипулятора с бурильной трубой, согласно изобретению дополнительно содержит систему углового позиционирования манипулятора, привод углового позиционирования манипулятора, направляющую углового позиционирования, при этом манипулятор установлен на буровом лафете с возможностью поворота вокруг оси перпендикулярной продольной оси бурового лафета.
Наличие системы углового позиционирования манипулятора позволяет исключить кран-манипулятор из операции загрузки бурильной трубы в буровую установку. Загрузка бурильных труб происходит из накопителя бурильных труб, который располагается на буровой площадке таким образом, что его зона выдачи бурильных труб совпадает с положением захвата манипулятора в начальной точке загрузки. При этом накопитель с бурильными трубами расположен горизонтально и не зависит от углового положения бурового лафета буровой установки и, соответственно, не требуется ориентация бурильных труб перед захватом их гидравлическим манипулятором. Предлагаемая система непрерывной загрузки бурильных труб в рабочую зону буровой установки исключает необходимость использования крана-манипулятора и управляющего им персонала. Такое решение позволяет ускорить процесс загрузки бурильных труб в буровую установку и сделать его практически непрерывным. Достаточно вовремя загружать бурильные трубы в накопитель по мере их выгрузки, это можно делать партиями бурильных труб.
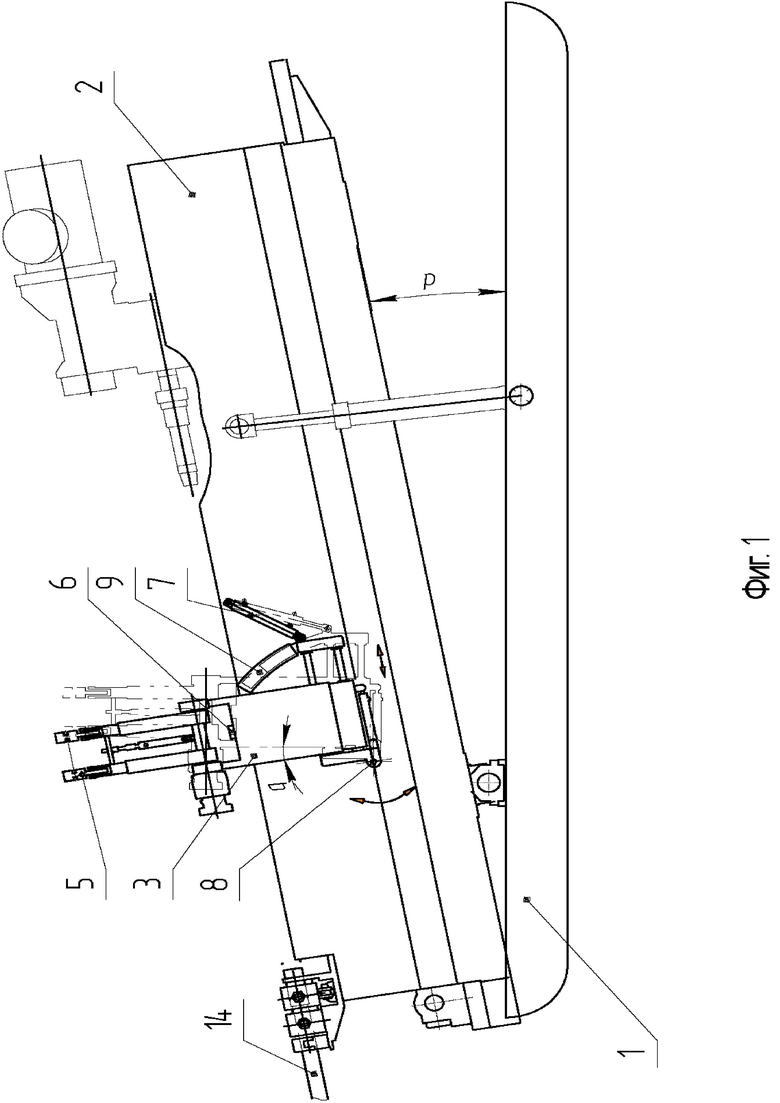
На Фиг. 1 представлена схема системы непрерывной загрузки бурильных труб в рабочую зону буровой установки в положении до загрузки бурильной трубы, вид сбоку.
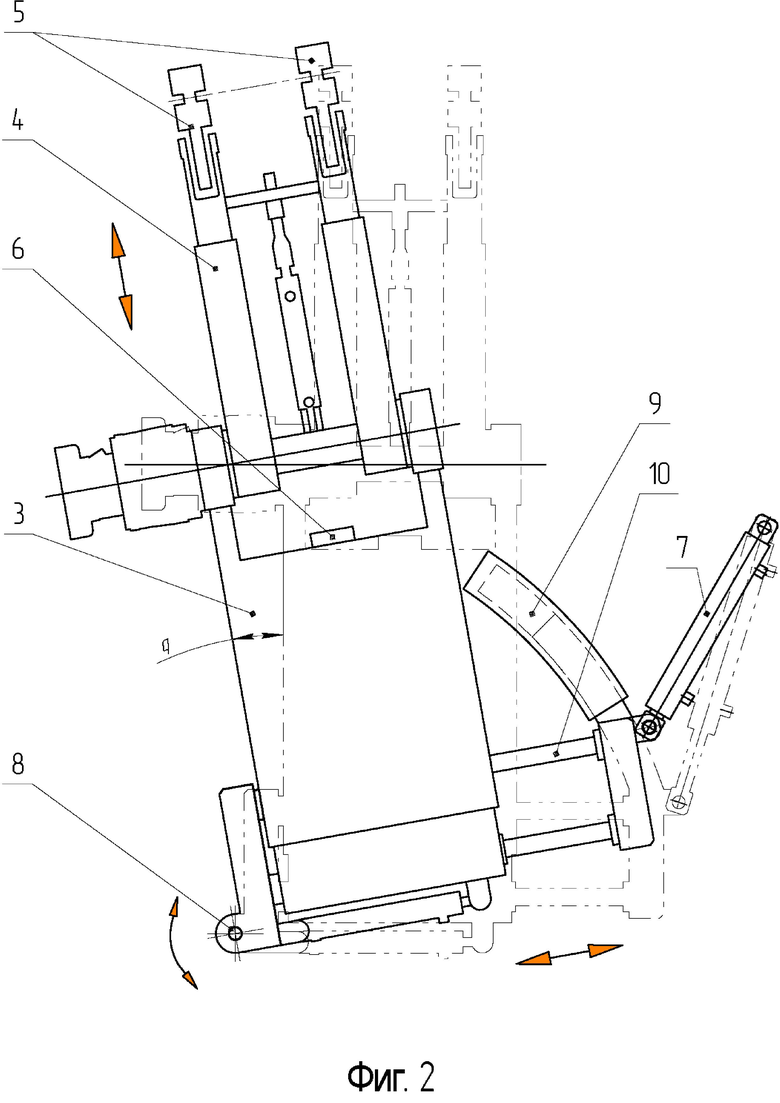
На Фиг. 2 представлена схема манипулятора.
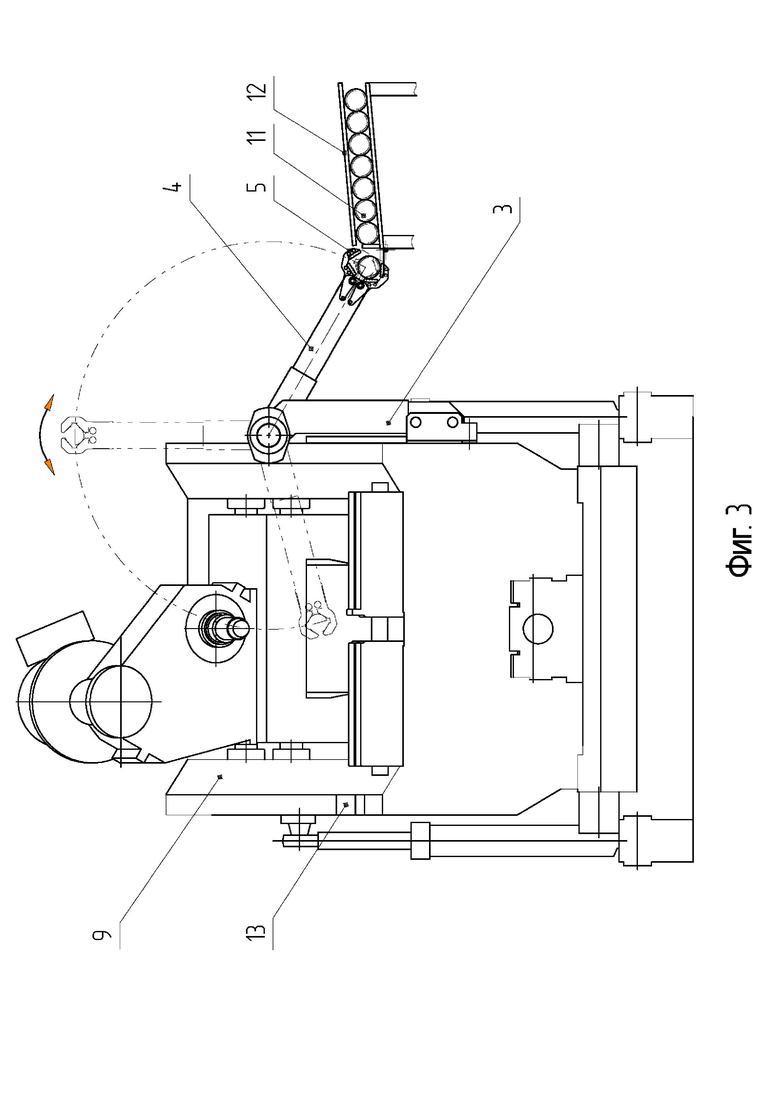
На Фиг. 3 представлена схема системы непрерывной загрузки бурильных труб в рабочую зону буровой установки, вид спереди.
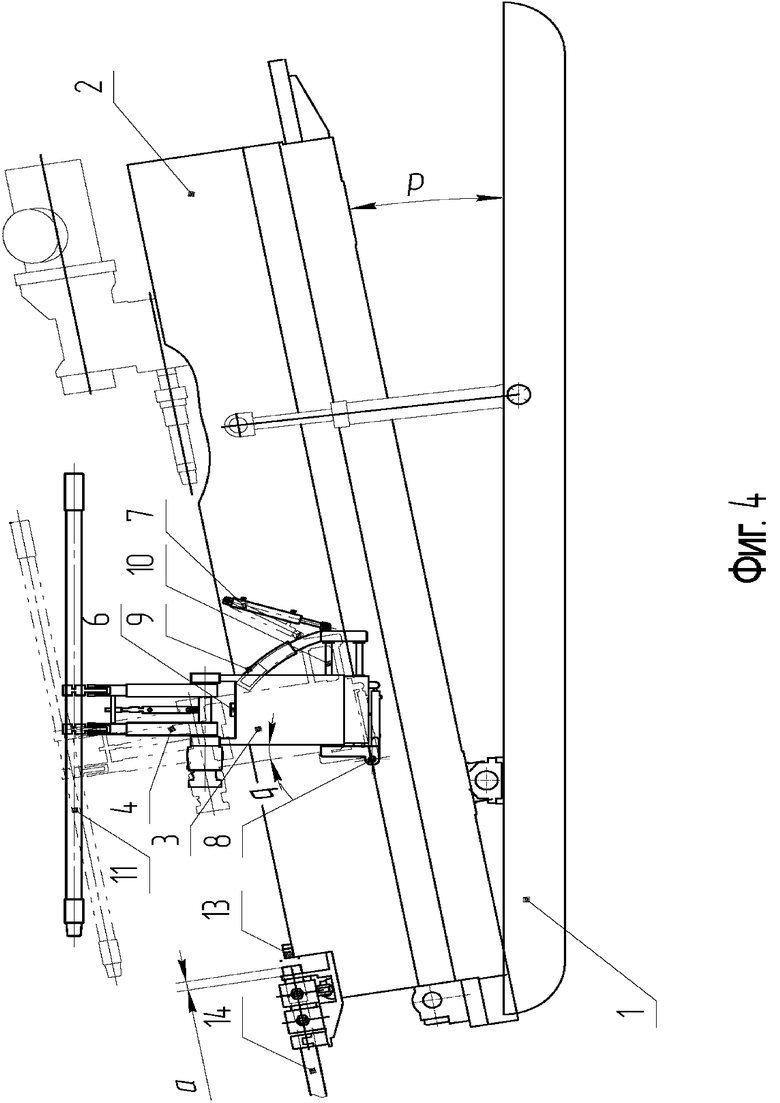
На Фиг. 4 представлена схема системы непрерывной загрузки бурильных труб в рабочую зону буровой установки в положении загрузки бурильной трубы, вид сбоку.
Система непрерывной загрузки бурильных труб в рабочую зону буровой установки содержит буровую установку 1, буровой лафет 2, манипулятор 3, поворотную часть 4 манипулятора 3, трубный захват 5 манипулятора 3, систему углового позиционирования 6 манипулятора 3, привод углового позиционирования 7, ость поворота 8, направляющую углового позиционирования 9 манипулятора 3, направляющую продольного перемещения 10 манипулятора 3, бурильную трубу 11, накопитель бурильных труб 12, систему отслеживания 13 буровой колонны 14 в рабочей зоне буровой установки 1.
Предлагаемая система непрерывной загрузки бурильных труб в рабочую зону буровой установки работает следующим образом.
Перед началом буровых работ после размещения буровой установки 1 на месте проведения работ задается проектный угол забуривания путем поднятия бурового лафета 2 до положения, когда его продольная ось составит с горизонтальной плоскостью буровой установки 1 угол p (Фиг. 1). При этом манипулятор 3, установленный на буровом лафете 2, поворачивается на тот же угол p. Бурильные трубы 11 находятся в накопителе бурильных 12, их продольные оси параллельны горизонтальной плоскости буровой установки 1 (Фиг. 3). Для того чтобы ось трубного захвата 5 манипулятора 3 оказалась параллельной оси бурильных труб 11, манипулятор 3 должен повернуться вокруг оси поворота 8 на угол q и занять горизонтальное положение (Фиг. 1, Фиг. 2). Система углового позиционирования 6 манипулятора 3 определяет отклонение манипулятора 3 от горизонтальной плоскости и дает команду приводу углового позиционирования 7 на включение. Привод углового позиционирования 7 поворачивает манипулятор 3 вокруг оси поворота 8 по направляющей углового позиционирования 9 до тех пор, пока манипулятор 3 не повернется на угол q и не займет горизонтальное положение. После этого поворотная часть 4 манипулятора 3 поворачивается до начальной точки загрузки бурильной трубы 11 из накопителя бурильных труб 12 (Фиг. 3). Трубный захват 5 манипулятора 3 захватывает бурильную трубу 11, поворотная часть 4 манипулятора 3 с удерживаемой бурильной трубой 11 поворачивается до вертикального положения (Фиг. 3, 4). После этого система углового позиционирования 6 дает команду приводу углового позиционирования 7 на поворот манипулятора 3 на угол q с тем, чтобы продольная ось удерживаемой бурильной трубы 11 оказалась параллельной продольной оси бурового лафета 2. В этот момент система отслеживания 13 положения буровой колонны 14 в рабочей зоне буровой установки 1 определяет величину a нахождения буровой колонны 14 в рабочей зоне буровой установки 1 и, в случае необходимости, дает команду на перемещение манипулятора 3 вдоль направляющей продольного перемещения 10 (Фиг. 4). Далее, путем поворота поворотной части 4 манипулятора 3 на заданный угол буровая штанга 11 загружается в рабочую зону буровой установки 1 (Фиг. 3).
В качестве привода углового позиционирования 7 манипулятора 3 может использоваться гидравлический цилиндр, электромеханический актуатор, электрический или гидравлический мотор. Направляющая углового позиционирования 9 манипулятора 3 служит для стабильного положения манипулятора 3 в любом из рабочих положений, плавности его поворота, снижения нагрузки на привод углового позиционирования.
Предлагаемая система непрерывной загрузки бурильных труб в рабочую зону буровой установки позволяет полностью автоматизировать процесс загрузки бурильных труб в буровую установку и исключить дополнительный персонал, обеспечивающий этот процесс. Процессом загрузки бурильных труб управляет оператор буровой установки, ему достаточно дать команду на загрузку бурильной трубы, далее система загрузки выполнит все операции в автоматическом режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЗАГРУЗКИ БУРОВЫХ ШТАНГ В РАБОЧУЮ ЗОНУ БУРОВОЙ УСТАНОВКИ НАКЛОННО-НАПРАВЛЕННОГО БУРЕНИЯ | 2008 |
|
RU2384690C2 |
| БУРОВОЙ ПОЛ ДЛЯ БУРОВОЙ УСТАНОВКИ | 2015 |
|
RU2705686C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА БУРИЛЬНОЙ КОЛОННЫ В СКВАЖИНЕ | 2010 |
|
RU2544192C2 |
| ПОДВОДНАЯ БУРОВАЯ УСТАНОВКА И ОПОРНАЯ ПЛАТФОРМА ДЛЯ НЕЕ | 1995 |
|
RU2081289C1 |
| СИСТЕМА И СПОСОБ КОЛОНКОВОГО БУРЕНИЯ СО СЪЕМНЫМ КЕРНОПРИЕМНИКОМ | 2009 |
|
RU2493348C2 |
| БУРОВОЙ СТАНОК | 2021 |
|
RU2760657C1 |
| БУРОВАЯ УСТАНОВКА И СПОСОБ ПРИМЕНЕНИЯ БУРОВОЙ УСТАНОВКИ | 2019 |
|
RU2794033C1 |
| ЗАХВАТЫВАЮЩЕЕ БУРИЛЬНУЮ ШТАНГУ УСТРОЙСТВО | 2014 |
|
RU2660697C2 |
| УСОВЕРШЕНСТВОВАННЫЙ СПОСОБ РЕЗКИ ТРУБ НА БУРОВОЙ ПЛОЩАДКЕ И ИНСТРУМЕНТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2802883C2 |
| СПОСОБ ВЗАИМНОГО СОЕДИНЕНИЯ БУРОВОЙ ШТАНГИ С БУРИЛЬНОЙ КОЛОННОЙ ПОСРЕДСТВОМ РЕЗЬБОВОГО СОЕДИНЕНИЯ, СИСТЕМА ПОГРУЗКИ-РАЗГРУЗКИ ШТАНГИ И БУРОВАЯ УСТАНОВКА | 2013 |
|
RU2625666C2 |
Изобретение относится к бурению наклонно-направленных скважин и строительству переходов трубопроводов различного назначения под естественными и искусственными преградами методом наклонно-направленного бурения. Система непрерывной загрузки бурильных труб в рабочую зону буровой установки содержит буровой лафет, выполненный с возможностью его поворота на угол по отношению к горизонтальной плоскости буровой установки, манипулятор, установленный с возможностью перемещения вдоль продольной оси буровой установки, систему отслеживания положения буровой колонны в рабочей зоне буровой установки и автоматического позиционирования манипулятора с бурильной трубой. Система непрерывной загрузки бурильных труб в рабочую зону буровой установки дополнительно содержит систему углового позиционирования манипулятора, привод углового позиционирования манипулятора, направляющую углового позиционирования манипулятора, накопитель бурильных труб. Система углового позиционирования манипулятора выполнена с возможностью определения отклонения манипулятора от горизонтальной плоскости. Система углового позиционирования манипулятора выполнена с возможностью подачи команд для включения привода углового позиционирования манипулятора. Манипулятор установлен на буровом лафете с возможностью поворота вокруг оси, перпендикулярной продольной оси бурового лафета, по направляющей углового позиционирования манипулятора посредством привода углового позиционирования манипулятора. Технический результат заключается в упрощении и ускорении процесса загрузки бурильных труб в рабочую зону буровой установки, исключении необходимости использования сложного трубного накопителя или крана-манипулятора и связанного с ним персонала, и, как следствие, в повышении безопасности буровых работ. 1 з.п. ф-лы, 4 ил.
1. Система непрерывной загрузки бурильных труб в рабочую зону буровой установки, содержащая буровой лафет, выполненный с возможностью его поворота на угол по отношению к горизонтальной плоскости буровой установки, манипулятор, установленный с возможностью перемещения вдоль продольной оси буровой установки, систему отслеживания положения буровой колонны в рабочей зоне буровой установки и автоматического позиционирования манипулятора с бурильной трубой, отличающаяся тем, что дополнительно содержит систему углового позиционирования манипулятора, привод углового позиционирования манипулятора, направляющую углового позиционирования манипулятора, накопитель бурильных труб, при этом система углового позиционирования манипулятора выполнена с возможностью определения отклонения манипулятора от горизонтальной плоскости, а также система углового позиционирования манипулятора выполнена с возможностью подачи команд для включения привода углового позиционирования манипулятора, при этом манипулятор установлен на буровом лафете с возможностью поворота вокруг оси, перпендикулярной продольной оси бурового лафета, по направляющей углового позиционирования манипулятора посредством привода углового позиционирования манипулятора.
2. Система непрерывной загрузки бурильных труб в рабочую зону буровой установки по п.1, отличающаяся тем, что накопитель бурильных труб установлен на буровой площадке в горизонтальной плоскости, а оси бурильных труб параллельны продольной оси буровой установки, при этом зона выдачи бурильных труб накопителя совпадает с положением захвата манипулятора в начальной точке загрузки.
| СИСТЕМА ЗАГРУЗКИ БУРОВЫХ ШТАНГ В РАБОЧУЮ ЗОНУ БУРОВОЙ УСТАНОВКИ НАКЛОННО-НАПРАВЛЕННОГО БУРЕНИЯ | 2008 |
|
RU2384690C2 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА И ПОДАЧИ ТРУБ ИЛИ ШТАНГ ПРИ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЯХ НА СКВАЖИНЕ С НАКЛОННЫМ ВХОДОМ | 2006 |
|
RU2304691C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЗИРОВАННОЙ УКЛАДКИ СКВАЖИННЫХ ТРУБ И ШТАНГ ПРИ СТРОИТЕЛЬСТВЕ И РЕМОНТЕ СКВАЖИН | 2010 |
|
RU2452847C2 |
| Автоматический агрегат для ремонта скважин,мостки,автоматический ключ | 1980 |
|
SU1141180A1 |
| DE 10341437 A1, 07.04.2005 | |||
| DE 10206645 A1, 28.08.2003 | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |

