Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления транспортным средством и устройству управления транспортным средством.
Уровень техники
[0002] Известна система управления транспортным средством для смены полосы движения транспортного средства с текущей полосы движения на соседнюю полосу движения. Такая система управления устанавливает время смены полосы движения, необходимое для смены полосы движения, тем более длительным, чем меньше скорость транспортного средства, когда скорость транспортного средства меньше первого предварительно определенного значения. Кроме того, такая система управления устанавливает время смены полосы движения тем более длительным, чем больше скорость транспортного средства, когда скорость транспортного средства больше второго предварительно определенного значения (Патентный документ 1).
[ДОКУМЕНТ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ]
[ПАТЕНТНЫЙ ДОКУМЕНТ]
[0003]
[Патентный документ 1] JP2017-140857A
[СУЩНОСТЬ ИЗОБРЕТЕНИЯ]
[ПРОБЛЕМА, РЕШАЕМАЯ ИЗОБРЕТЕНИЕМ]
[0004] Когда задействуемое транспортное средство въезжает вперед другого транспортного средства для смены полосы движения, водитель другого транспортного средства подтверждает поведение задействуемого транспортного средства перед сменой полосы движения задействуемого транспортного. Обычной системе управления транспортным средством, независимо от состояния водителя другого транспортного средства, требуется время, установленное в соответствии со скоростью задействуемого транспортного средства, для смены полосы движения. К сожалению, это может сократить время для водителя другого транспортного средства, чтобы подтвердить поведение задействуемого транспортного средства, когда водитель другого транспортного средства не знает о задействуемом транспортном средстве.
[0005] Задача, которая должна быть решена настоящим изобретением, состоит в том, чтобы предоставить способ управления транспортным средством и устройство управления транспортным средством, приспособленные продлевать время для водителя другого транспортного средства, чтобы подтвердить поведение задействуемого транспортного средства в ситуации, когда задействуемое транспортное средство въезжает вперед другого транспортного средства, чтобы сменить полосу движения.
[СРЕДСТВА ДЛЯ РЕШЕНИЯ ПРОБЛЕМЫ]
[0006] Для решения вышеупомянутых проблем согласно одному аспекту настоящего изобретения получают информацию об окружающей обстановке задействуемого транспортного средства посредством датчика, обеспеченного в задействуемом транспортном средстве, и определяют, присутствует ли отвлекающий фактор для водителя другого транспортного средства, когда задействуемое транспортное средство въезжает вперед другого транспортного средства, движущегося по второй полосе движения, для смены полос движения с первой полосы движения на вторую полосу движения, смежную с первой полосой движения, устанавливают время смены полосы движения, необходимое для того, чтобы транспортное средство сменило полосы движения, при этом время смены полосы движения более длительное при определении присутствия отвлекающего фактора, чем при определении отсутствия отвлекающего фактора, и управляют позицией движения задействуемого транспортного средства на первой полосе движения в пределах времени смены полосы движения.
[ТЕХНИЧЕСКИЙ РЕЗУЛЬТАТ ИЗОБРЕТЕНИЯ]
[0007] Аспект настоящего изобретения позволяет увеличить время для водителя другого транспортного средства, чтобы подтвердить поведение задействуемого транспортного средства в ситуации, при которой задействуемое транспортное средство въезжает вперед другого транспортного средства, чтобы сменить полосы движения.
[КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ]
На Фиг.1 показана блок-схема примера системы транспортного средства, включающей в себя устройство управления транспортным средством согласно первому варианту осуществления.
На Фиг.2A показана блок-схема последовательности операций процесса управления, выполняемого устройством управления транспортным средством, согласно первому варианту осуществления настоящего изобретения.
На Фиг.2B показана блок-схема последовательности операций процесса управления, выполняемого устройством управления транспортным средством, согласно первому варианту осуществления.
На Фиг.3 показан пример движения задействуемого транспортного средства, когда выполняется процесс с Фиг.2А и с Фиг.2Б.
На Фиг.4 показана схема, поясняющая время смены полосы движения, вычисленное устройством управления транспортным средством, согласно второму варианту осуществления.
На Фиг.5A показана блок-схема последовательности операций процесса управления, выполняемого устройством управления транспортным средством, согласно второму варианту осуществления настоящего изобретения;
На Фиг.5B показана блок-схема последовательности операций процесса управления, выполняемого устройством управления транспортным средством, согласно второму варианту осуществления.
На Фиг.6 показана схема, поясняющая время смены полосы движения, вычисленное устройством управления транспортным средством, согласно третьему варианту осуществления.
На Фиг.7A показана блок-схема последовательности операций процесса управления, выполняемого устройством управления транспортным средством, согласно третьему варианту осуществления настоящего изобретения.
На Фиг.7B показана блок-схема последовательности операций процесса управления, выполняемого устройством управления транспортным средством, согласно третьему варианту осуществления.
На Фиг.8 показана схема, поясняющая фактическое поле обзора, оцененное устройством управления транспортным средством, согласно четвертому варианту осуществления.
На Фиг.9A показана блок-схема последовательности операций процесса управления, выполняемого устройством управления транспортным средством, согласно четвертому варианту осуществления настоящего изобретения.
На Фиг.9B показана блок-схема последовательности операций процесса управления, выполняемого устройством управления транспортным средством, согласно четвертому варианту осуществления настоящего изобретения.
[РЕЖИМ(Ы) ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ]
[0009] <Первый вариант осуществления>
В дальнейшем варианты осуществления настоящего изобретения будут описаны со ссылкой на чертежи. Настоящий вариант осуществления будет описан на примере устройства управления транспортным средством, установленного на транспортном средстве.
На Фиг.1 показана схема конфигурации примера системы 200 транспортного средства, включающей в себя контроллер 100 транспортного средства, согласно одному варианту осуществления настоящего изобретения. Система 200 транспортного средства согласно настоящему варианту осуществления установлена на транспортном средстве. Система 200 транспортного средства представляет собой систему, позволяющую транспортному средству автоматически менять полосу движения.
[0011] Как показано на Фиг.1, система 200 транспортного средства согласно настоящему варианту осуществления включает в себя группу 10 датчиков окружающей обстановки, группу 20 датчиков транспортного средства, навигационную систему 30, базу 40 данных карт, HMI 50, контроллер 60 исполнительных механизмов, группу 70 исполнительных механизмов управления транспортным средством, указатель 80 направления и контроллер 100 транспортного средства. Эти устройства или системы соединены друг с другом посредством сети (CAN) управления или другой LAN внутри транспортного средства для взаимного обмена информацией.
[0012] Группа 10 датчиков окружающей обстановки представляет собой группу датчиков для обнаружения состояния (внешнего состояния) окружающей обстановки задействуемого транспортного средства, она предусмотрена в транспортном средстве. Как показано на Фиг.1, группа 10 датчиков окружающей обстановки может включать в себя, например, радар 11 и устройство 12 формирования изображений.
[0013] Радар 11 обнаруживает объекты вокруг задействуемого транспортного средства. Радар 11 может включать в себя радар миллиметрового диапазона, лазерный радар, ультразвуковой радар и лазерный дальномер. Радар 11 обнаруживает объект, например, посредством передачи радиоволн в окружение задействуемого транспортного средства и приема радиоволн, отраженных объектом. В частности, радар 11 обнаруживает направление на объект и расстояние до объекта. Радар 11 также обнаруживает относительную скорость (включая направление движения) объекта относительно задействуемого транспортного средства в соответствии с направлением на объект и изменением времени расстояния до объекта. Радар 11 выводит обнаруженные результаты в контроллер 100 транспортного средства.
[0014] В настоящем варианте осуществления радар 11 предназначен для обнаружения объектов во всех направлениях от задействуемого транспортного средства. Например, радар 11 предусмотрен спереди, сбоку и сзади транспортного средства, соответственно, и состоит из переднего радара для обнаружения объекта впереди транспортного средства, бокового радара для обнаружения объекта сбоку от транспортного средства и задний радар для обнаружения объекта сзади транспортного средства. Количество и тип радаров 11, включенных в задействуемое транспортное средство, особо не ограничено.
[0015] Устройство 12 формирования изображений формирует изображение объекта вокруг транспортного средства. Устройство 12 формирования изображений может включать в себя, например, камеру, содержащую устройство формирования изображений CCD или CMOS. Захваченное изображение, захваченное устройством 12 формирования изображений, выводится в контроллер 100 транспортного средства.
[0016] В настоящем варианте осуществления устройство 12 формирования изображений предназначено для формирования изображений объектов во всех направлениях от задействуемого транспортного средства. Например, устройство 12 формирования изображений предоставляется впереди транспортного средства, сбоку и сзади, соответственно, и состоит из передней камеры для формирования изображений объекта перед транспортным средством, боковой камеры для формирования изображений объекта сбоку от транспортного средства, задней камера для обнаружения объекта сзади транспортного средства. Количество и тип устройств 12 формирования изображения, включенных в задействуемое транспортное средство, особо не ограничены.
[0017] Объекты, обнаруживаемые группой 10 датчиков окружающей обстановки, включают в себя, например, велосипеды, мотоциклы, транспортные средства (в дальнейшем также называемые другими транспортными средствами), дорожные препятствия, светофоры, дорожную разметку (включающей в себя границы полос движения) и пешеходные переходы. Например, когда другое транспортное средство движется вдоль направления движения задействуемого транспортного средства вокруг задействуемого транспортного средства, радар 11 обнаруживает направление и расстояние до другого транспортного средства, и относительную скорость другого транспортного средства относительно задействуемого транспортного средства в соответствии с позицией задействуемого транспортного. Кроме того, устройство 12 формирования изображений захватывает изображение, позволяющее определять тип транспортного средства другого транспортного средства, размер другого транспортного средства и форму другого транспортного средства.
[0018] Кроме того, например, когда задействуемое транспортное средство движется по конкретной полосе движения среди множества полос движения, радар 11 обнаруживает граничную линию полосы движения, разделяющую полосу движения, по которой движется задействуемое транспортное средство, и полосу движения, расположенную сбоку от полосы движения, и определяет расстояние от задействуемого транспортного средства до граничной линии полосы движения. Кроме того, устройство 12 формирования изображений захватывает изображение, позволяющее определять тип граничной линии полосы движения. Между прочим, для граничных линий полосы движения по обе стороны от задействуемой полосы движения радар 11 обнаруживает расстояние от задействуемого транспортного средства до каждой граничной линии полосы движения. Кроме того, в нижеследующем описании полоса движения, по которой движется задействуемое транспортное средство, упоминается как задействуемая полоса движения, а полоса движения, расположенная сбоку задействуемой полосы движения, упоминается как смежная полоса движения.
[0019] Группа 20 датчиков транспортного средства представляет собой группу датчиков для обнаружения состояния транспортного средства (внутреннего состояния). Как показано на Фиг.1, группа 20 датчиков транспортного средства может включать в себя датчик 21 скорости транспортного средства, акселерометр 22, гироскопический датчик 23, датчик 24 угла поворота рулевого колеса, датчик 25 акселератора и датчик 26 тормоза.
[0020] Датчик 21 скорости транспортного средства измеряет скорость вращения системы привода, такой как ведущий вал, и определяет скорость движения задействуемого транспортного средства в соответствии с результатом измерения. Датчик 21 скорости транспортного средства предусмотрен, например, на ведущем валу, вращающемся как одно целое с колесами или колесами задействуемого транспортного средства. Акселерометр 22 определяет ускорение задействуемого транспортного средства. Акселерометр 22 включает в себя продольный акселерометр для обнаружения ускорения в продольном направлении задействуемого транспортного средства и поперечный акселерометр для обнаружения поперечного ускорения задействуемого транспортного средства. Гироскопический датчик 23 определяет скорость вращения задействуемого транспортного средства, то есть величину перемещения (угловую скорость) под углом задействуемого транспортного средства в единицу времени. Датчик 24 угла поворота рулевого колеса обнаруживает угол рулевого управления. Датчик 24 угла поворота рулевого колеса, например, предусмотрен на валу рулевого колеса задействуемого транспортного средства. Датчик 25 акселератора обнаруживает величину нажатия (положение педали акселератора) педали акселератора. Датчик 25 акселератора предусмотрен, например, на валу педали акселератора. Датчик 26 тормоза определяет величину нажатия педали тормоза (положение педали тормоза). Датчик 26 тормоза предусмотрен, например, на валу педали тормоза.
[0021] Результат обнаружения, обнаруженный группой 20 датчиков транспортного средства, выводится в контроллер 100 транспортного средства. Результаты обнаружения могут включать в себя, например, скорость транспортного средства, ускорение (включая продольное и поперечное ускорение), угловую скорость, величину нажатия педали акселератора и величину нажатия педали тормоза задействуемого транспортного средства.
[0022] Навигационная система 30 представляет собой систему для указания направления пассажиру (включая водителю) задействуемого транспортного средства посредством указания маршрута от текущей позиции задействуемого транспортного средства до пункта назначения в соответствии с информацией о текущей позиции задействуемого транспортного средства. Навигационная система 30 получает информацию о карте, вводимую из базы 40 данных карт, которая будет описана ниже, и информацию о пункте назначения, вводимую через HMI 50 от пассажира задействуемого транспортного средства. Навигационная система 30 формирует маршрут движения транспортного средства в соответствии с введенной информацией. Затем навигационная система 30 выводит информацию о маршруте движения задействуемого транспортного средства в контроллер 100 транспортного средства и представляет информацию о маршруте движения задействуемого транспортного средства пассажиру задействуемого транспортного средства через HMI 50. Таким образом, пассажиру предоставляется маршрут движения от текущей позиции до пункта назначения.
[0023] Как показано на Фиг.1, навигационная система 30 включает в себя GPS 31, коммуникатор 32 и навигационный контроллер 33.
[0024] GPS 31 получает данные о позиции (глобальная система определения позиционирования, GPS), которые указывают текущую позицию задействуемого транспортного средства. GPS 31 получает позиционные данные задействуемого транспортного средства посредством приема приемником радиоволн, передаваемых от множества спутниковых систем связи. Кроме того, GPS 31 может обнаруживать изменения в информации о позиции задействуемых транспортных средств посредством приема радиоволн, периодически передаваемых от множества спутниковых систем связи.
[0025] Коммуникатор 32 получает информацию об окружающем состоянии транспортного средства снаружи. Коммуникатор 32 представляет собой, например, сервер или систему, установленную вне транспортного средства, или устройство, выполненное с возможностью осуществлять связь с коммуникатором, установленным на другом транспортном средстве.
[0026] Например, коммуникатор 32 получает информацию о дорожном движении из системы передачи информации о дорожном движении (Vehicle Information and Communication System, VICS (зарегистрированная торговая марка), далее то же самое) посредством устройства (маяка) передачи информации или FM-мультиплексного вещания или тому подобному, предоставленному на дороге. Информация о дорожном движении может включать в себя, например, информацию о пробках в полосах движения, информацию об авариях, информацию о неисправном транспортном средстве, информацию о строительных работах, информацию о регулировании скорости, информацию о регулировании полосы движения и т.д. Следует отметить, что информация о дорожном движении не обязательно включает в себя каждую из вышеупомянутой информации и может включать в себя, по меньшей мере, любую из вышеупомянутой информации.
[0027] Примеры информации о пробке (дорожном заторе) могут включать в себя информацию об области, где происходит пробка, расстояние до пробки и требуемое время, пока транспортное средство не проедет через пробку. Примеры информации об аварии могут включать в себя информацию об области, где произошла авария, содержание аварии и время, необходимое для того, чтобы покинуть точку, в которой произошла авария. Примеры информации о неисправном транспортном средстве могут включать в себя информацию об области, где существует неисправное транспортное средство, номер неисправного транспортного средства и время, необходимое для выезда из этой области. Примеры информации о регулировании скорости могут включать в себя информацию об области, подлежащей регулированию скорости, и временной зоне регулирования скорости. Примеры строительных работ могут включать в себя информацию о строящемся районе, часовом поясе, в котором ведется строительство, и времени, необходимом для того, чтобы покинуть этот район.
[0028] Кроме того, например, коммуникатор 32 получает от коммуникатора, установленного на другом транспортном средстве, информацию об относительной скорости другого транспортного средства по отношению к задействуемому транспортному средству, информацию об относительной позиции другого транспортного средства относительно задействуемого транспортного средства, и тому подобное. Такая связь, осуществляемая задействуемым транспортным средством и другим транспортным средством, называется связью между транспортными средствами. Коммуникатор 32 посредством связи между транспортными средствами получает информацию, такую как скорость транспортного средства другого транспортного средства, в качестве информации об окружающей обстановке транспортного средства.
[0029] Информация, такая как относительная скорость другого транспортного средства, может быть получена другим способом. Например, коммуникатор 32 может получать информацию, включающую в себя позицию другого транспортного средства, скорость транспортного средства и направление движения, от VICS в качестве информации об окружающей обстановке задействуемого транспортного средства. Тип информации, получаемой коммуникатором 32, не ограничивается вышеуказанным типом. Например, коммуникатор 32 может также получать информацию о погоде в области, где движется задействуемое транспортное средство, от сервера, распространяющего информацию о погоде. Кроме того, например, коммуникатор 32 может также получать информацию о времени текущего периода времени в области, где движется задействуемое транспортное средство, от сервера, распространяющего информацию о времени.
[0030] Навигационный контроллер 33 представляет собой компьютер, который генерирует маршрут движения от текущей позиции задействуемого транспортного средства до пункта назначения. Например, навигационный контроллер 33 может включать в себя ROM (постоянное запоминающее устройство), в котором хранится программа для создания пути перемещения, CPU (центральный блок обработки), который выполняет программу, хранящуюся в ROM, и RAM (оперативное запоминающее устройство), которое функционирует как доступное запоминающее устройство.
[0031] Навигационный контроллер 33 получает информацию о текущей позиции задействуемого транспортного средства, вводимую от GPS 31, информацию о дорожном движении, вводимую от коммуникатора 32, информацию карты, вводимую из базы 40 данных карт, и информацию о пункте назначения транспортного средства, вводимую от HMI 50. Например, предположим, что пассажир задействуемого транспортного средства установил пункт назначения задействуемого транспортного средства через HMI 50. Навигационный контроллер 33 генерирует маршрут от текущей позиции до пункта назначения в полосе движения в качестве маршрута движения задействуемого транспортного средства в соответствии с информацией о позиции задействуемого транспортного средства, информацией о пункте назначения задействуемого транспортного средства, информацией карты, и информация о дорожном движении. Навигационный контроллер 33 выводит сгенерированную информацию о маршруте движения в контроллер 100 транспортного средства и представляет информацию пассажиру транспортного средства через HMI 50.
[0032] В настоящем варианте осуществления маршрут движения транспортного средства может быть любым маршрутом при условии, что транспортное средство может прибыть в пункт назначения из текущей позиции, и другие условия не ограничены. Например, навигационный контроллер 33 может генерировать маршрут движения задействуемого транспортного средства в соответствии с условиями, установленными пассажиром. Например, когда пассажир предпочитает использовать платную дорогу для прибытия в пункт назначения, навигационный контроллер 33 может сгенерировать маршрут движения, используя платную дорогу, в соответствии с информацией карты. Кроме того, например, навигационный контроллер 33 в соответствии с информацией о дорожном движении может генерировать маршрут движения задействуемого транспортного средства. Например, когда на пути кратчайшего маршрута к месту назначения возникает затор, навигационный контроллер 33 может искать маршрут объезда и генерировать маршрут, имеющий самое короткое требуемое время, из множества объездных маршрутов, которые таким образом искали как маршрут движения.
[0033] База 40 данных карт хранит информацию карты. Информация карты включает в себя информацию о дорогах и правилах дорожного движения. Информация о дороге и информация о правилах дорожного движения определяются узлами и связями (также называемыми дорожными связями), соединяющими узлы. Связи идентифицируются на уровне полосы движения.
[0034] Информация о дороге относится к дорогам, по которым могут передвигаться транспортные средства. Каждое дорожное сообщение связано с информацией, относящейся к дорогам, такой как, например, тип дороги, ширина дороги, форма дороги, оправданность движения по прямой, приоритетность движения, оправданность обгона (выезд на соседнюю полосу или нет), оправданность смены полосы движения, хотя и не ограничивается. Кроме того, информация о месте установки светофоров, положении перекрестков, направлении въезда на перекрестки, типе перекрестков и других перекрестках, например, связана с каждым соединением дорог.
[0035] Информация о правилах дорожного движения относится к правилам дорожного движения, которые транспортное средство должно соблюдать во время движения. Правила дорожного движения могут включать в себя, например, паузу на маршруте, запрет стоянки/остановки, медленное движение, ограничение скорости, запрет смены полосы движения. Информация о правилах дорожного движения в разделе, определяемом соединением дорог, связана с каждым соединением дорог. Например, информация о запрете смены полосы движения связана с соединением дорог в разделе о запрете смены полосы движения. Информация о правилах дорожного движения может быть связана не только с дорогой, но и с определенной точкой (широтой, маршрутом) на узле или, например, на карте.
[0036] Информация о правилах дорожного движения может включать в себя не только информацию о правилах дорожного движения, но также информацию о светофорах. Например, информация о цвете, отображаемом в данный момент сигналом светофора, и/или информация о цикле переключения отображения сигнала светофора может быть связана с соединением дорог на перекрестке, на котором установлен светофор. Информация о сигнале светофора получается от VICS, например, коммуникатором 32, или от устройства передачи информации (например, оптического маяка), установленного на проезжей части. Информация отображения светофора меняется с течением времени. Таким образом, информация о правилах дорожного движения обновляется каждый предварительно определенный цикл.
[0037] Информация карты, хранящаяся в базе 40 данных карт, может быть информацией карты высокой точности, подходящей для автоматического вождения. Информация карты высокой точности получается, например, посредством связи с сервером или системой, установленной вне транспортного средства. Кроме того, высокоточная информация карты, информация, полученная в реальном времени с использованием группы 10 датчиков окружающей обстановки (например, информация об объекте, обнаруженном радаром 11, изображение окружающей обстановки транспортного средства, захваченное устройством 12 формирования изображений), может быть сгенерирована в любое время.
[0038] Здесь в настоящем варианте осуществления будет описано автономное вождение. В настоящем варианте осуществления автономное вождение означает режим вождения, отличный от режима вождения, в котором только водитель управляет движением. Например, автономное вождение может включать в себя случай, когда контроллер (не показан) поддерживает водителя для управления движением или контроллер (не показан) управляет движением от имени водителя.
[0039] В настоящем варианте осуществления система 200 транспортного средства включает в себя базу 40 данных карт, но база 40 данных карт может быть предоставлена вне системы 200 транспортного средства. Например, информация карты может быть ранее сохранена в портативном запоминающем устройстве (например, на внешнем жестком диске, флэш-памяти). В этом случае запоминающее устройство функционирует как база 40 данных карт, электрически соединяя контроллер 100 транспортного средства и запоминающее устройство, хранящее информацию карты.
[0040] HMI 50 представляет собой интерфейс для вывода и ввода данных между пассажиром транспортного средства и системой 200 транспортного средства (человеко-машинный интерфейс (Human Machine Interface, HMI)). Примеры HMI 50 могут включать в себя дисплей для отображения текста или видеоинформации и динамик для вывода звука, такого как музыка или звук.
[0041] Теперь будет описана передача и прием данных через HMI 50. Например, когда пассажир вводит пункт назначения в HMI 50, пункт назначения выводится из HMI 50 в навигационную систему 30. Это позволяет навигационной системе 30 получать информацию о пункте назначения транспортного средства. Кроме того, например, когда навигационная система 30 формирует маршрут движения к месту назначения, навигационная система 30 выводит данные маршрута движения в HMI 50. Затем HMI 50 выводит информацию о маршруте движения с дисплея и/или динамика. Таким образом, информация о маршруте движения к пункту назначения предоставляется пассажиру задействуемого транспортного средства. Информация о маршруте движения к пункту назначения может включать в себя, например, руководство по маршруту и необходимое время до пункта назначения.
[0042] Кроме того, например, когда пассажир вводит команду выполнения смены полосы движения на HMI 50, команда выводится с HMI 50 в контроллер 100 транспортного средства. Это позволяет контроллеру 100 транспортного средства начать процесс управления сменой полосы движения. Кроме того, например, когда контроллер 100 транспортного средства устанавливает целевую траекторию для смены полосы движения, информация о целевой траектории выводится из контроллера 100 транспортного средства в HMI 50. Затем HMI 50 выводит информацию о целевой траектории с дисплея и/или динамика. Это представляет информацию о целевой траектории для смены полосы движения водителю задействуемого транспортного средства. Информация о целевой траектории для смены полосы движения может включать в себя, например, позицию въезда, указанную на смежной полосе движения, и целевую траекторию во время смены полосы движения. Целевая траектория и позиция въезда будут описаны позже.
[0043] Контроллер 60 исполнительных механизмов управляет перемещением задействуемого транспортного средства. Контроллер 60 исполнительных механизмов включает в себя механизм управления рулевым управлением, механизм управления акселератором, механизм управления тормозом, механизм управления двигателем и т.п. Контроллер 60 исполнительных механизмов получает входной сигнал управления от контроллера 100 транспортного средства, который будет описан ниже. Контроллер 60 исполнительных механизмов обеспечивает автономное вождение задействуемого транспортного средства посредством управления группой 70 исполнительных механизмов управления транспортным средством в ответ на сигнал управления от контроллера 100 транспортного средства. Например, контроллер 60 исполнительных механизмов вычисляет угол рулевого управления, необходимый для движения транспортного средства, и величину нажатия педали акселератора или величину нажатия тормоза в соответствии со скоростью движения в ответ на сигнал управления для движения задействуемого транспортного средства с задействуемой полосы движения на соседний переулок. Контроллер 60 исполнительных механизмов выводит вычисленные различные параметры в группу 70 исполнительных механизмов управления транспортным средством.
[0044] Управление каждым механизмом может выполняться полностью автоматически или может выполняться таким образом, чтобы помогать управлению движением водителя. Управление каждым механизмом может быть прервано или остановлено вмешательством водителя. Способ управления движением посредством контроллера 60 исполнительных механизмов не ограничивается вышеописанным способом управления, и могут использоваться другие хорошо известные способы.
[0045] Группа 70 исполнительных механизмов управления транспортным средством представляет собой различные исполнительные механизмы для приведения в движение задействуемого транспортного средства. Как показано на Фиг.1, группа 70 исполнительных механизмов управления транспортным средством может включать в себя исполнительный механизм 71 рулевого управления, исполнительный механизм 72 акселератора и исполнительный механизм 73 управления тормозом.
[0046] Привод 71 рулевого управления управляет направлением рулевого управления и величиной рулевого управления задействуемого транспортного средства в ответ на входной сигнал от контроллера 60 исполнительных механизмов. Привод 72 акселератора регулирует степень ускорения задействуемого транспортного средства в ответ на входной сигнал от контроллера 60 исполнительных механизмов. Привод 73 управления тормозом управляет работой тормозного устройства задействуемого транспортного средства в ответ на входной сигнал от контроллера 60 исполнительных механизмов.
[0047] Указатель 80 направления имеет внутри мигающую лампу, когда водитель транспортного средства приводит в действие переключатель указания направления (не показан), он светится оранжевым. Указатель 80 направления представляет собой устройство для указания направления движения задействуемого транспортного средства в окружающей обстановке, когда задействуемое транспортное средство поворачивает направо и налево или меняет полосу движения. Например, указатель 80 направления встроен в левую и правую части передней и задней части транспортного средства. Например, указатель 80 направления состоит из указателя левого направления (поворота) и указателя правого направления (поворота).
[0048] Кроме того, в настоящем варианте осуществления сигнал управления вводится из контроллера 100 транспортного средства в указатель 80 направления. Сигнал управления может включать в себя, например, сигнал для мигания указателя 80 направления, который выключен (также называемый сигналом мигания), сигнал для выключения указателя 80 направления, который мигает (также называемый сигналом выключения). Например, когда сигнал мигания вводится в указатель 80 направления для мигания указателя левого направления, указатель 80 направления загорается для указателя направления влево. После этого, когда сигнал выключения для выключения указателя левого направления вводится в указатель 80 направления, указатель 80 направления выключает указатель левого направления. Таким образом, указателем 80 направления, помимо водителя транспортного средства, управляет контроллер 100 транспортного средства.
[0049] Далее будет описан контроллер 100 транспортного средства. Контроллер 100 транспортного средства согласно одному или более вариантам осуществления настоящего изобретения конфигурируется компьютером, на котором установлены аппаратное обеспечение и программное обеспечение. В частности, сервер 1 выполнен с возможностью включать в себя постоянное запоминающее устройство (ROM), в котором хранятся программы, центральный блок управления (CPU), который выполняет программы, хранящиеся в ROM, и запоминающее устройство произвольного доступа (RAM), которое служит доступным устройством хранения. В качестве рабочих схем могут использоваться MPU (микроблок обработки), DSP (цифровой сигнальный процессор), ASIC (специализированная интегральная схема и FPGA (программируемая пользователем вентильная матрица) вместо или в дополнение к процессорам. Контроллер 101, показанный на фиг.1, соответствует CPU. Хранилище 109, показанное на Фиг.1, соответствует ROM и RAM.
[0050] В настоящем варианте осуществления программа, которая должна выполняться контроллером 101, заранее сохраняется в хранилище 109, но программа может храниться в другом устройстве. Например, программа может храниться на машиночитаемом и портативном машиночитаемом носителе записей (например, дисковом носителе, флэш-памяти и т.д.). В этом случае контроллер 101 выполняет программу, загруженную с машиночитаемого носителя записей. Другими словами, контроллер 100 транспортного средства может быть выполнен с возможностью включать в себя только рабочую схему и загружать программу извне.
[0051] Как показано на Фиг.1, контроллер 101 включает в себя блок 102 получения информации, блок 103 распознавания ситуации, блок 104 задания, блок 105 определения, блок 106 установок управления, блок 107 определения присутствия пространства и блок 108 управления движением. Эти блоки задействуют функции, описанные далее, посредством программного обеспечения, установленного в ROM. В настоящем варианте осуществления функции контроллера 101 разделены на семь функциональных блоков, и описаны функции соответствующих функциональных блоков. Однако функции контроллера 101 не обязательно должны быть разделены на семь блоков и могут быть разделены на шесть или менее функциональных блоков или восемь или более функциональных блоков. Функция контроллера 101 не ограничивается функцией функционального блока, описанного ниже, но может включать в себя, например, функцию управления навигационной системой.
[0052] Сейчас будет описана функция блока 102 получения информации. Блок 102 получения информации получает различную информацию из группы 10 датчиков окружающей обстановки, группы 20 датчиков транспортного средства, навигационной системы 30, базы 40 данных карт и каждого из HMI 50.
[0053] Блок 102 получения информации получает информацию об окружающей обстановке (также называемую внешней информацией задействуемого транспортного средства) задействуемого транспортного средства, которая обнаруживается группой 10 датчиков окружающей обстановки. Информация об окружающей обстановке задействуемого транспортного средства включает в себя результат обнаружения, обнаруженный радаром 11, и изображение, захваченное устройством 12 формирования изображений. Кроме того, блок 102 получения информации получает информацию (также называемую внутренней информацией задействуемого транспортного средства) о состоянии задействуемого транспортного средства, которая обнаруживается группой 20 датчиков транспортного средства. Внутренняя информация задействуемого транспортного средства включает в себя скорость транспортного средства, ускорение, угловую скорость, величину нажатия педали акселератора и величину нажатия педали тормоза. Кроме того, блок 102 получения информации получает текущую позицию задействуемого транспортного средства, маршрут движения задействуемого транспортного средства и информацию о дорожном движении от навигационной системы 30. Блок 102 получения информации получает информацию карты (включающую в себя информацию о дороге и информацию о правилах дорожного движения) из базы 40 данных карт. Блок 102 получения данных получает команду смены полосы движения от HMI 50. Различные типы информации, полученные блоком 102 получения информации, используются в соответствующих функциях, описанных ниже.
[0054] Теперь будет описана функция блока 103 распознавания ситуации. Блок 103 распознавания ситуации распознает ситуацию вокруг задействуемого транспортного средства в соответствии с различной информацией, полученной блоком 102 получения информации, и идентифицирует точку смены полосы движения задействуемого транспортного средства.
[0055] Блок 103 распознавания ситуации распознает ситуацию вокруг задействуемого транспортного средства. Например, блок 103 распознавания ситуации распознает присутствие или отсутствие препятствия в окрестностях задействуемого транспортного средства, направление к препятствию, расстояние до препятствия и относительную скорость препятствия относительно задействуемого транспортного средства от результата обнаружения, обнаруженного радаром 11, и изображение, захваченное устройством 12 формирования изображений. Это позволяет блоку 103 распознавания ситуации определять количество препятствий, взаимное расположение каждого препятствия и задействуемого транспортного средства, скорость движения препятствия.
[0056] Кроме того, например, блок 103 распознавания ситуации распознает расстояние между задействуемым транспортным средством и граничной линией полосы движения на основе результата обнаружения, обнаруженного радаром 11, и изображения, захваченного устройством 12 формирования изображений. Это позволяет блоку 103 распознавания ситуации определять, в каком положении задействуемое транспортное средство движется по задействуемой полосе движения в направлении ширины полосы движения. Далее позиция транспортного средства в пределах полосы движения также называется горизонтальной позицией транспортного средства относительно полосы движения. Блок 103 распознавания ситуации, например, устанавливает конкретную позицию на центральной линии транспортного средства как горизонтальную позицию транспортного средства по отношению к полосе движения, хотя это особо не ограничено.
[0057] Кроме того, например, блок 103 распознавания ситуации указывает количество полос движения дороги, по которым движется задействуемое транспортное средство, в соответствии с результатом, обнаруженным радаром 11, изображением, захваченным устройством 12 формирования изображений, и информацией карты в базе 40 данных карт. При указании множества полос движения в том же направлении, что и направление движения задействуемого транспортного средства, модуль 103 распознавания ситуации указывает полосу, по которой задействуемое транспортное средство движется среди множества полос.
[0058] Блок 103 распознавания ситуации указывает точку смены полосы движения в соответствии с окружающей ситуацией задействуемого транспортного средства и маршрутом движения задействуемого транспортного средства после распознавания окружающей ситуации задействуемого транспортного средства. Блок 103 распознавания ситуации получает текущую позицию задействуемого транспортного средства и маршрут движения задействуемого транспортного средства от навигационной системы 30 и указывает точку смены полосы движения в соответствии с текущей позицией задействуемого транспортного средства и маршрутом движения. Точка смены полосы движения указывает точку, в которой задействуемое транспортное средство необходимо переместить с полосы движения на соседнюю полосу движения при движении по маршруту движения. Блок 103 распознавания ситуации указывает точку, в которой следует изменить полосу движения в маршруте движения со ссылкой на маршрут движения задействуемого транспортного средства.
[0059] Блок 103 распознавания ситуации указывает целевую точку на маршруте движения, такую как перекресток, который является точкой для переключения направления движения, или развязка, которая является точкой для изменения курса в направлении, отличном от направления движения транспортного средства. Затем блок 103 распознавания ситуации для изменения направления движения задействуемого транспортного средства в целевой точке определяет точку смены полосы движения, в которой необходимо переместить транспортное средство с задействуемой полосы движения на соседнюю полосу движения.
[0060] Например, задействуемому транспортному средству, которое движется по крайней левой полосе движения из множества полос движения, необходимо передвинуться в правую полосу движения для поворота направо на перекрестке перед текущей позицией в соответствии с маршрутом движения. В такой ситуации блок 103 распознавания ситуации указывает перекресток, который требует поворота направо, в качестве целевой точки. Блок 103 распознавания ситуации указывает точку, которая находится на предварительно определенном расстоянии от перекрестка (целевой точки),в которой нужно повернуть направо, в качестве точки смены полосы движения на маршруте движения. Например, точка смены полосы движения устанавливается на расстоянии нескольких 100 м от целевой точки на маршруте движения. Точка смены полосы движения не обязательно должна быть установлена в точке, это может быть выполнено на предварительно определенном участке. В качестве другого примера точка смены полосы движения может включать в себя предварительно определенный участок перед точкой разветвления, имеющейся на скоростной автомагистрали, предварительно определенный участок перед точкой слияния, имеющейся на скоростной автомагистрали, и предварительно определенный участок перед пунктом назначения транспортного средства на дороге. Точка разветвления, имеющаяся на скоростной автомагистрали, включает в себя точки разветвления в каждом направлении и точки разветвления между главной линией и съездом. В настоящем варианте осуществления длина участка смены полосы движения особо не ограничена.
[0061] Теперь будут описаны функции блока 104 задания. Блок 104 задания задает позицию въезда, которая указывает позицию пункта назначения въезда задействуемого транспортного средства, и находится на полосе движения, смежной с задействуемой полосой движения, в соответствии с информацией об окружающей обстановке задействуемого транспортного средства. Например, блок 104 задания указывает позицию въезда, которая имеет предварительно определенную длину (расстояние) или более от направления вдоль направления движения задействуемого транспортного средства на смежной полосе движения в соответствии с результатом, обнаруженным радаром 11, и захваченным устройством 12 формирования изображений. Предварительно определенное расстояние представляет собой предварительно определенное расстояние, которое определяется экспериментально.
[0062] Кроме того, блок 104 задания указывает заднее транспортное средство, расположенное за позицией въезда, после задания позиции въезда. Например, блок 104 задания задает среди множества других транспортных средств, расположенных за позицией въезда, заднее транспортное средство, расположенное ближе всего к позиции въезда на смежной полосе движения. Для задания заднего транспортного средства блок 104 задания может заранее задать предварительно определенную область за позицией въезда и задать заднее транспортное средство внутри предварительно определенной области. Например, блок 104 задания задает предварительно определенную область с длиной, соответствующей скорости транспортного средства или задействуемой скорости в направлении вдоль направления движения задействуемого транспортного средства. Предварительно определенная область особо не ограничена. Предварительно определенная область может храниться в запоминающем устройстве, таком как ROM.
[0063] Кроме того, блок 104 задания определяет, что задействуемое транспортное средство собирается въехать вперед другого транспортного средства, чтобы сменить полосу движения после задания заднего транспортного средства. Количество полос движения, которые должно пересечь транспортное средство при смене полосы движения, особо не ограничено. Количество полос движения, по которой движется задействуемое транспортное средство, может составлять по меньшей мере две: задействуемая полоса движения и смежная полоса. В нижеследующем описании транспортное средство, идентифицированное как заднее транспортное средство, будет описано просто как другое транспортное средство.
[0064] Далее будут описаны функции блока 105 определения. Блок 105 определения определяет, присутствует ли отвлекающий фактор для водителя другого транспортного средства, в соответствии с информацией об окружающей обстановке задействуемого транспортного средства. Отвлекающий фактор для водителя другого транспортного средства, представляет собой компонент или естественную особенность, участвующие в отвлечении водителя другого транспортного средства. В частности, для водителей другого транспортного средства отвлекающий фактор для водителя связан с управлением другим транспортным средством. В настоящем варианте осуществления отвлекающие факторы для водителя другого транспортного средства включают в себя не только факторы, которые обязательно отвлекают водителя, но также факторы, которые могут отвлекать водителя. В настоящем варианте осуществления отвлекающий фактор для водителя не включает в себя задействуемое транспортное средство.
[0065] Отвлекающий фактор для водителя может включать в себя, например, впереди идущее транспортное средство, предшествующее другому транспортному средству. Например, блок 105 определения определяет присутствие отвлекающего фактора для водителя другого транспортного средства посредством распознавания впереди идущего транспортного средства другого транспортного средства на смежной линии посредством использования результата, обнаруженного радаром 11, и изображения, захваченного устройством 12 формирования изображений. Это определение соответствует точке зрения, согласно которой водитель другого транспортного средства осуществляет операцию вождения, обращая внимание на существование впереди идущего транспортного средства. Между прочим, полоса движения, по которой движется впереди идущее транспортное средство, может быть полосой движения, отличной от смежной полосы, по которой движется другое транспортное средство. Например, полоса движения, по которой движется впереди идущее транспортное средство, может быть рассматриваемой полосой движения, или для дороги с тремя или более полосами движения она может быть полосой движения, смежной с противоположной стороной задействуемой полосы движения относительно смежной полосы движения.
[0066] Отвлекающий фактор для водителя другого транспортного средства, может включать в себя не только впереди идущее транспортное средство, но также свечение указателя направления впереди идущего транспортного средства. Для впереди идущего транспортного средства, находящегося на полосе движения, смежной с противоположной стороной задействуемой полосы движения относительно смежной полосы движения, свечение указателя направления впереди идущего транспортного средства может отвлекать водителя другого транспортного средства. Это соответствует точке зрения, согласно которой водитель другого транспортного средства уделяет особое внимание вождению, поскольку впереди идущее транспортное средство может въехать вперед другого транспортного средства для смены полосы движения.
[0067] Отвлекающий фактор для водителя другого транспортного средства, может включать в себя поведение, форму или цвет впереди идущего транспортного средства. Поведение впереди идущего транспортного средства может включать в себя, например, повторение смены полосы движения более предварительно определенного количества раз в единицу времени. Форма или цвет впереди идущего транспортного средства может включать в себя, например, уникальную форму или уникальный цвет впереди идущего транспортного средства. Это соответствует точке зрения, согласно которой водители другого транспортного средства склонны обращать внимание на транспортные средства с большим количеством смен полос движения. Это также соответствует точке зрения, что водители другого транспортного средства могут отвлекаться на транспортное средство, форма или цвет которого отличается от обычно знакомых транспортных средств.
[0068] Отвлекающие факторы для водителя могут включать в себя отображения светофоров. Например, блок 105 определения определяет, что отвлекающий фактор для водителя другого транспортного средства присутствует, распознавая светофор, находящийся перед другим транспортным средством, по изображению, захваченному устройством 12 формирования изображения. Это определение соответствует точке зрения, согласно которой водитель другого транспортного средства выполняет операцию вождения, обращая внимание на отображение сигнала светофора. Отметим, что место, где установлен светофор, особо не ограничено. Блок 105 определения определяет светофор как отвлекающий фактор для водителя другого транспортного средства, когда распознанный светофор определяет транспортный поток на смежной полосе движения.
[0069] Отвлекающим фактором для водителя может быть место дорожно-транспортного происшествия. Например, блок 105 определения распознает, что дорожно-транспортное происшествие произошло на встречной полосе, по информации от VICS. Встречная полоса движения - это полоса движения, противоположная задействуемой полосе движения и смежной полосе движения. Затем модуль 105 определения определяет, что отвлекающий фактор для водителя другого транспортного средства присутствует, когда модуль 105 определения распознает, что другое транспортное средство собирается проехать рядом с местом аварии. Это определение соответствует точке зрения, согласно которой водители другого транспортного средства выполняют операции по вождению, обращая внимание на место дорожно-транспортного происшествия.
[0070] Отвлекающий фактор для водителя может включать в себя транспортное средство экстренной службы. Транспортное средство экстренной службы может включать в себя, например, транспортное средство полицейской службы, транспортное средство экстренной службы и транспортное средство пожарной службы. Например, блок 105 определения распознает сзади задействуемого транспортного средства или другого транспортного средства или на встречной полосе движения транспортное средство экстренной службы, движущееся со звучащей сиреной, по изображению, захваченному устройством 12 формирования изображения. Блок 105 определения определяет присутствие отвлекающего фактора для водителя другого транспортного средства посредством распознавания транспортного средства экстренной службы. Это определение соответствует точке зрения, согласно которой водители других транспортных средств выполняют операции вождения транспортным средством, обращая внимание на присутствие транспортных средств экстренной службы.
[0071] Отвлекающие факторы для водителя включают в себя факторы, влияющие на слух водителя, в дополнение к факторам, влияющим на зрение водителя. Например, отвлекающие факторы для водителя могут включать в себя голосовые подсказки для автомобильной навигации, информацию о землетрясении и т.д. Например, блок 105 определения оценивает, что голосовое указание, относящееся к ограничению скорости, будет выполняться автомобильной навигацией, распознавая прохождение через знак ограничения скорости в соответствии с текущей позицией задействуемого транспортного средства и информацией карты. В этом случае блок 105 определения определяет присутствие отвлекающего фактора для водителя другого транспортного средства. Это определение соответствует точке зрения, согласно которой водители склонны реагировать на голосовые инструкции автомобильной навигацией. Например, модуль 105 определения может определять отвлекающий фактор для водителя в соответствии с информацией, полученной посредством связи между транспортными средствами, когда модуль 105 определения может получать информацию автомобильной навигации другого транспортного средства с использованием связи между транспортными средствами.
[0072] Например, блок 105 определения определяет, что отвлекающий фактор для водителя другого транспортного средства присутствует, когда он распознал экстренную информацию о землетрясении от VICS. Это определение соответствует точке зрения, согласно которой водители реагируют на раннее предупреждение о землетрясении и склонны отвлекать свое внимание от управления транспортным средством.
[0073] Отвлекающие факторы для водителя включают в себя факторы, косвенно воздействующие на водителя, в дополнение к факторам, непосредственно действующим на водителя. Такой отвлекающий фактор для водителя может включать в себя форму полосы движения. Например, блок 105 определения определяет присутствие отвлекающего фактора для водителя другого транспортного средства, когда он распознал форму смежной полосы движения как крутой кривой в соответствии с информацией карты. Это определение соответствует точке зрения, согласно которой при движении по крутой кривой водители склонны следить за полосой движения и теряют внимание к окружающей обстановке.
[0074] Теперь будут описаны функции блока 106 установок управления. Блок 106 установок управления устанавливает время смены полосы движения. Время смены полосы движения представляет собой время, необходимое транспортному средству для смены полосы движения с задействуемой полосы движения на соседнюю полосу движения. В частности, в настоящем варианте осуществления время смены полосы движения включает в себя время, необходимое для каждого управления, выполняемого блоком 108 управления движением. Управление, выполняемое блоком 108 управления движением, представляет собой управление свечением указателя направления для свечения указателя 80 направления, имеющегося на стороне смежной полосы движения, и управление сменой полосы движения для перемещения задействуемого транспортного средства с полосы движения к позиции въезда, указанной на соседний полосе движения. Другими словами, в настоящем варианте осуществления время смены полосы движения включает в себя время свечения (также называемое первым временем) указателя 80 направления, имеющегося на стороне смежной полосы движения, и время (также называемое четвертым временем), требуемое для перемещения задействуемого транспортного средства с задействуемой полосы движения к позиции въезда, указанной на смежной полосе движения.
[0075] Блок 106 установок управления устанавливает другое время смены полосы движения согласно результату определения, касающемуся присутствия отвлекающего фактора для водителя другого транспортного средства. В частности, в настоящем варианте осуществления блок 106 установок управления устанавливает время смены полосы движения более длительным, когда определяется присутствие отвлекающего фактора для водителя другого водителя, по сравнению со случаем, когда фактор не существует. Блок 106 установок управления, когда определяется присутствие отвлекающего фактора, устанавливает по меньшей мере одно из времени свечения указателя 80 направления и времени, необходимого для перемещения транспортного средства с задействуемой полосы движения в заданную позицию въезда на смежной полосе движения более длительным, чем когда отвлекающий фактор не определен.
[0076] Например, при установке времени смены полосы движения блок 106 установок управления получает предварительно установленное время свечения указателя 80 направления из хранилища, такого как ROM. Блок 106 установок управления добавляет заранее предварительно определенное время к предварительно установленному времени свечения указателя 80 направления, когда определяется присутствие отвлекающего фактора. Он устанавливает время смены полосы движения более длительным, чем при отсутствии отвлекающего фактора. Предварительно определенное время определяется экспериментально и заранее сохраняется в запоминающем устройстве, таком как ROM. Например, предварительно определенное время представляет собой время, соответствующее скорости транспортного средства задействуемого транспортного средства. Далее для удобства пояснения предварительно определенное время для добавления, чтобы увеличить время смены полосы движения, будет описано как дополнительное время.
[0077] Кроме того, например, при установке времени смены полосы движения блок 106 установок управления получает информацию о скорости транспортного средства при перемещении транспортного средства с задействуемой полосы движения на соседнюю полосу движения из хранилища, такого как ROM. Информация о скорости транспортного средства включает в себя информацию о скорости транспортного средства (в дальнейшем также называемую скоростью движущегося транспортного средства) во время смены полосы движения с задействуемой полосы движения на соседнюю полосу движения. Скорость движущегося транспортного средства может включать в себя относительную скорость относительно конкретной опорной скорости транспортного средства, например, скорость задействуемого транспортного средства. Блок 106 установок управления вычитает предварительно определенную скорость из предварительно определенной скорости движущегося транспортного средства, чтобы установить скорость движущегося транспортного средства, когда присутствует отвлекающий фактор для водителя. Чем ниже скорость движущегося транспортного средства, тем больше времени требуется для перемещения задействуемого транспортного средства к позиции въезда. Он устанавливает время смены полосы движения более длительным, чем при отсутствии отвлекающего фактора для водителя другого транспортного средства. Предварительно определенная скорость определяется экспериментально и заранее сохраняется в запоминающем устройстве (хранилище), таком как ROM. Далее, для удобства пояснения, предварительно определенная скорость, которая должна быть вычтена, чтобы увеличить время смены полосы движения, будет описана как вычитаемая скорость.
[0078] В приведенном выше описании дополнительное время может быть временем, соответствующим относительной скорости между задействуемым транспортным средством и впереди идущим транспортным средством. Кроме того, вычитаемая скорость может быть скоростью, соответствующей относительной скорости между задействуемым транспортным средством и впереди идущим транспортным средством. Впереди идущее транспортное средство представляет собой транспортное средство, которое движется по полосе движения, смежной с смежной полосой движения, на противоположной стороне задействуемой полосы движения по отношению к смежной полосе движения, и является транспортным средством, которое движется впереди другого транспортного средства. Например, блок 106 установки управления распознает, что впереди идущее транспортное средство движется по стороне, противоположной задействуемой полосе движения, через соседнюю полосу движения. Блок 106 установок управления получает информацию об относительной скорости впереди идущего транспортного средства по отношению к задействуемому транспортному средству посредством связи между транспортными средствами. Блок 106 установок управления устанавливает дополнительное время или вычитаемую скорость в соответствии с относительной скоростью впереди идущего транспортного средства по отношению к задействуемому транспортному средству. Например, блок 106 установок управления устанавливает дополнительное время более длительным при снижении относительной скорости впереди идущего транспортного средства по отношению к задействуемому транспортному средству ниже. Например, блок 106 установок управления устанавливает более высокую вычитаемую скорость при снижении относительной скорости впереди идущего транспортного средства по отношению к задействуемому транспортному средству. Он устанавливает время смены полосы движения более длительным при уменьшении разности скоростей между задействуемым транспортным средством и впереди идущим транспортным средством.
[0079] Теперь будут описаны функции блока 107 определения присутствия пространства. Блок 107 определения присутствия пространства определяет, присутствует ли пространство, в которое въезжает транспортное средство (в дальнейшем также называемое пространством для въезда), в позиции въезда, указанной блоком 104 задания, в соответствии с информацией об окружающей обстановке задействуемого транспортного средства. Пространство для въезда представляет собой пространство между передним транспортным средством и задним транспортным средством с предварительно определенной или более продолженной длиной направления вдоль направления движения задействуемого транспортного средства.
[0080] Блок 107 определения присутствия пространства определяет, присутствует ли пространство для въезда в позиции въезда в соответствии с расстоянием между транспортными средствами переднего транспортного средства и заднего транспортного средства. Например, блок 107 определения присутствия пространства определяет, что пространство для въезда присутствует в позиции въезда, когда расстояние между транспортными средствами переднего транспортного средства и заднего транспортного средства равно или превышает предварительно определенное расстояние. С другой стороны, блок 107 определения присутствия пространства определяет, что в позиции въезда нет пространства для въезда, когда расстояние между транспортными средствами переднего транспортного средства и заднего транспортного средства меньше предварительно определенного расстояния. Предварительно определенное расстояние представляет собой расстояние, на котором водитель переднего транспортного средства и заднего транспортного средства не чувствует никакого беспокойства при въезде задействуемого транспортного средства, которое устанавливается заранее. Предварительно определенное расстояние может включать в себя значение, полученное посредством добавления запаса к расстоянию (длине транспортного средства в направлении движения) между передним концом и задним концом задействуемого транспортного средства в направлении вдоль направления движения задействуемого транспортного средства.
[0081] Теперь будут описаны функции блока 108 управления движением. Блок 108 управления движением управляет движением задействуемого транспортного средства в процессе управления сменой полосы движения. В настоящем варианте осуществления блок 108 управления движением выполняет управление свечением и управление сменой полосы движения указателя направления в соответствии со временем смены полосы движения. В дальнейшем каждое управление будет описано подробно.
[0082] Блок 108 управления движением выполняет управление свечением указателя направления для свечения указателя 80 направления, имеющегося на стороне смежной полосы движения. Например, блок 108 управления движением генерирует сигнал управления (сигнал свечения) для свечения указателя 80 направления, имеющегося на смежной стороне полосы движения, и выводит сигнал свечения в указатель 80 направления. В это время блок 108 управления движением устанавливает момент времени начала свечения и время свечения указателя 80 направления таким образом, чтобы обеспечить время управления сменой полосы движения, установленное блоком 106 установок управления. Затем блок 108 управления движением выводит сигнал свечения согласно временному моменту начала свечения указателя направления в указатель 80 направления. После этого блок 108 управления движением выводит сигнал выключения в указатель 80 направления по истечении установленного времени свечения. Это позволяет управлять свечением указателя 80 направления с учетом времени смены полосы движения.
[0083] Кроме того, блок 108 управления движением выполняет управление сменой полосы движения для перемещения задействуемого транспортного средства к позиции въезда, установленной на смежной полосе движения от задействуемой полосы движения. Блок 108 управления движением генерирует целевую траекторию для задействуемого транспортного средства, чтобы сменить полосу движения, используя текущую позицию транспортного средства в качестве начальной точки и положение въезда в качестве конечной точки. Блок 108 управления движением устанавливает скорость задействуемого транспортного средства и угол рулевого управления, когда транспортное средство движется по целевой траектории. Блок 108 управления движением выводит различные сигналы управления в контроллер 60 исполнительных механизмов. В это время блок 108 управления движением устанавливает скорость транспортного средства и угол рулевого управления задействуемого транспортного средства, чтобы обеспечить время управления сменой полосы движения, установленное блоком 106 установок управления. Это позволяет управлять сменой полосы движения с учетом времени смены полосы движения. Когда задействуемое транспортное средство достигает позиции въезда, блок 108 управления движением прекращает мигание указателя 80 направления и прекращает управление сменой полосы движения.
[0084] Кроме того, блок 108 управления движением управляет перемещением задействуемого транспортного средства, чтобы подождать задействуемое транспортное средство в предварительно определенной позиции перед достижением позиции въезда, когда блок 107 присутствия пространства определяет, что в позиции въезда нет пространства для въезда. Например, блок 108 управления движением устанавливает позицию ожидания, где целевая траектория и граничная линия полосы движения пересекаются. Блок 108 управления движением управляет движением задействуемого транспортного средства, чтобы переместить задействуемое транспортное средство в позицию ожидания. Например, блок 108 управления движением устанавливает скорость транспортного средства и угол рулевого управления для достижения позиции ожидания, скорости транспортного средства в позиции ожидания, угла, под которым передний конец задействуемого транспортного средства обращен к позиции ожидания, и т.п., и выводит сигнал управления, включающий в себя предварительно определенное содержимое, в контроллер 60 исполнительных механизмов.
[0085] Кроме того, блок 108 управления движением устанавливает скорость задействуемого транспортного средства и угол рулевого управления вдоль целевой траектории, когда блок 107 определения присутствия пространства определяет присутствие пространства для въезда в позиции въезда. Блок 108 управления движением выводит различные сигналы управления в контроллер 60 исполнительных механизмов. Это позволяет задействуемому транспортному средству менять полосу движения с задействуемой полосы движения на соседнюю полосу движения вдоль целевой траектории, таким образом, въезжая в позицию между передним транспортным средством и задним транспортным средством. Время выполнения процесса перемещения задействуемого транспортного средства в позицию въезда не ограничено. Блок 108 управления движением может перемещать задействуемое транспортное средство в позицию въезда, когда определено, что пространство для въезда присутствует в позиции въезда.
[0086] Последовательность операций управления контроллера 101 согласно настоящему варианту осуществления будет описана со ссылкой на Фиг.2А и 2B. На Фиг.2А и На Фиг.2B показаны блок-схемы последовательности операций процесса управления, выполняемого контроллером 100 транспортного средства согласно настоящему варианту осуществления. Далее, как показано на Фиг.3 будет описан пример движения задействуемого транспортного средства, которое обеспечивается обработкой управления, выполняемой контроллером 101. Управление каждым из них может выполняться полностью автоматически или может выполняться таким образом, чтобы помогать водителю при вождении.
[0087] На этапе S1 контроллер 101 получает информацию об окружающей обстановке задействуемого транспортного средства. Например, контроллер 101 получает информацию от группы 10 датчиков окружающей обстановки о направлении к другому транспортному средству и расстоянии до другого транспортного средства, относительной скорости другого транспортного средства по отношению к задействуемому транспортному средству, типу транспортного средства другого транспортного средства, размерам другого транспортного средства и форме другого транспортного средства как информацию об окружающей обстановке задействуемого транспортного средства. Кроме того, например, контроллер 101 получает информацию о пробках на дороге, включающей в себя задействуемую полосу движения, в качестве информации об окружающей обстановке задействуемого транспортного средства от коммуникатора 32. Между прочим, контроллер 101 получает внешнюю информацию и внутреннюю информацию о задействуемом транспортном средстве в предварительно определенном цикле при выполнении обработки управления после этапа S2. Состояние движения выражается положением транспортного средства, скоростью транспортного средства и т.д.
[0088] На этапе S2 контроллер 101 распознает ситуацию вокруг задействуемого транспортного средства в соответствии с информацией об окружающей обстановке задействуемого транспортного средства, полученной на этапе S1.
[0089] На этапе S3 контроллер 101 задает участок, на котором задействуемое транспортное средство должно сменить полосу движения (точка смены полосы движения). Кроме того, контроллер 101 сравнивает текущую позицию задействуемого транспортного средства с точкой смены полосы движения и определяет, достигло ли задействуемое транспортное средство точки смены полосы движения. Когда определено, что задействуемое транспортное средство достигло точки смены полосы движения, процесс переходит на этап S4. С другой стороны, когда определено, что задействуемое транспортное средство не достигло точки смены полосы движения, система ожидает на этапе S3.
[0090] На этапе S4 контроллер 101 задает позицию въезда, расположенную на смежной полосе движения и указывает позицию пункта назначения въезда задействуемого транспортного средства в соответствии с информацией об окружающей обстановке задействуемого транспортного средства. Например, блок 104 задания задает позицию въезда, где расстояние (длина) вдоль направления движения транспортного средства составляет предварительно определенное расстояние или более на смежной полосе движения. Кроме того, контроллер 101 задает транспортное средство, расположенное перед позицией въезда, как переднее транспортное средство, а транспортное средство, расположенное за позицией въезда, как заднее транспортное средство, когда присутствует по меньшей мере одно из переднего транспортного средства и заднего транспортного средства, расположенное между позицией въезда.
[0091] На этапе S5, в соответствии с информацией об окружающей обстановке задействуемого транспортного средства, контроллер 101 определяет, собирается ли задействуемое транспортное средство въехать вперед другого транспортного средства для смены полосы движения. Например, когда заднее транспортное средство задано на этапе S4, контроллер 101 определяет, что задействуемое транспортное средство собирается въехать вперед другого транспортного средства для смены полосы движения. С другой стороны, когда заднее транспортное средство не задано на этапе S4, контроллер 101 определяет, что задействуемое транспортное средство не собирается въезжать вперед другого транспортного средства. Задняя часть позиции въезда может включать в себя, например, область с длиной, соответствующей скорости транспортного средства задействуемого транспортного средства в направлении вдоль направления движения задействуемого транспортного средства. Когда определено, задействуемое транспортное средство въезжает вперед другого транспортного средства, чтобы сменить полосу движения, процесс переходит к этапу S6. С другой стороны, когда определено, что задействуемое транспортное средство не въезжает вперед другого транспортного средства, процесс переходит на этап S8.
[0092] На этапе S5, когда определяется, что задействуемое транспортное средство въезжает вперед другого транспортного средства на полосу смены полосы движения, процесс переходит на этап S6. На этапе S6 контроллер 101 в соответствии с информацией об окружающей обстановке задействуемого транспортного средства определяет, присутствует ли отвлекающий фактор для водителя другого транспортного средства. Например, когда контроллер 101 распознает транспортное средство, идущее впереди другого транспортного средства на смежной полосе движения, то он определяет присутствие отвлекающего фактора для водителя другого транспортного средства. Когда определяется присутствие отвлекающего фактора для водителя другого транспортного средства, процесс переходит на этап S7. С другой стороны, когда отвлекающий фактор не определен, процесс переходит на этап S8.
[0093] Когда на этапе S6 определяется присутствие отвлекающего фактора, процесс переходит на этап S7. На этапе S7 контроллер 101 устанавливает время смены полосы движения длительнее предварительно определенного времени заранее. Например, предполагается, что на этапе S6 контроллер 101 задает транспортное средство, которое движется по полосе, смежной со смежной полосой движения на противоположной стороне полосы движения, и опережает другое транспортное средство. В этом случае контроллер 101 устанавливает более длительное время свечения указателя 80 направления, поскольку относительная скорость между транспортным средством и впереди идущим транспортным средством снижается. Это увеличивает дополнительное время и, таким образом, устанавливает более длительным время смены полосы движения, чем предварительно определенное время.
[0094] На Фиг.3 показан пример ситуации, в которой транспортное средство V переходит с полосы L1 движения на полосу L2 движения на дороге с тремя полосами движения на одной стороне (полоса L1 движения, полосой L2 движения и полосой L3 движения). Полоса L2 движения представляет собой полосу, смежную с полосой L1 справа от транспортного средства V. Полоса L3 движения представляет собой полосу, смежную с полосой L2 справа от транспортного средства V. Граница L12 полосы движения образуется между полосой L1 движения и полосой L2 движения. Между полосой L2 движения и полосой L3 движения образуется граница полосы L23 движения. Транспортное средство, движущееся по полосе L2, представляет собой другое транспортное средство Y1. Транспортное средство, движущееся по полосе L3 движения, представляет собой другое транспортное средство X1. Ситуация на Фиг.3 - это примерная ситуация после выполнения процессов этапов S1-S7 на Фиг.2А. Кроме того, на Фиг.3 пунктирная стрелка, выходящая из другого транспортного средства Y1, указывает линию обзора водителя другого транспортного средства Y1. На Фиг.3 предполагается, что водитель другого транспортного средства Y1 обращает внимание на задействуемое транспортное средство V и другое транспортное средство X1. Кроме того, на Фиг.3, центральная линия C1 является центральной линией полосы L1 движения вдоль направления движения задействуемого транспортного средства V, центральная линия C2 является центральной линией полосы L2 движения вдоль направления движения задействуемого транспортного средства V, а центральная линия C3 представляет собой центральную линию полосы L3 движения вдоль направления движения задействуемого транспортного средства V.
[0095] В ситуации на Фиг.3, контроллер 101 определяет, что задействуемое транспортное средство V достигло точки смены полосы движения (не показано) (ДА на этапе S3), и задает позицию въезда перед другим транспортным средством Y1 (этап S4). На этапе S5 контроллер 101 определяет другое транспортное средство Y1, расположенное за позицией въезда, как заднее транспортное средство, и определяет, что задействуемое транспортное средство V въезжает вперед другого транспортного средства Y1 для смены полосы движения. Контроллер 101 задает другое транспортное средство X1, движущееся впереди другого транспортного средства Y1 по полосе L3, как впереди идущее транспортное средство в соответствии с информацией об окружающей обстановке задействуемого транспортного средства. Контроллер 101 определяет, что отвлекающий фактор для водителя другого транспортного средства Y1 присутствует из-за другого транспортного средства X1 (этап S6). На этапе S7 контроллер 101 устанавливает дополнительное время или вычитаемую скорость в соответствии с относительной скоростью транспортного средства V и относительной скоростью транспортного средства X1.
[0096] Со ссылкой на Фиг.2B будет описана блок-схема последовательности операций процесса смены полосы движения. На этапе S9 контроллер 101 выполняет управление свечением указателя направления в соответствии со временем смены полосы движения, установленным на этапе S7. Например, контроллер 101 выводит сигнал свечения и сигнал выключения в указатель 80 направления, чтобы обеспечить время свечения указателя 80 направления среди времени смены полосы движения.
[0097] На этапе S10 контроллер 101 определяет, присутствует ли пространство для въезда в позиции въезда, установленной на этапе S4. Например, контроллер 101 определяет, что пространство для въезда присутствует в позиции въезда, когда расстояние между транспортными средствами переднего транспортного средства и другого транспортного средства (заднего транспортного средства) равно или превышает предварительно определенное расстояние. С другой стороны, контроллер 101 определяет, что в позиции въезда нет пространства для въезда, когда расстояние между транспортными средствами переднего транспортного средства и заднего транспортного средства меньше предварительно определенного расстояния. Когда определено, что пространство для въезда присутствует в позиции въезда, процесс переходит на этап S11. С другой стороны, когда пространство для въезда не определено, процесс переходит на этап S12.
[0098] Если определено, что пространство для въезда присутствует в позиции въезда на этапе S10, процесс переходит на этап S11. На этапе S11, в соответствии со временем смены полосы движения, установленным на этапе S7, контроллер 101 выполняет управление сменой полосы движения с задействуемой полосы движения на соседнюю полосу движения и завершает процесс смены полос движения транспортного средства. Например, контроллер 101 устанавливает скорость транспортного средства и угол рулевого управления задействуемого транспортного средства так, чтобы обеспечить время, необходимое для движения к позиции въезда среди времени смены полосы движения.
[0099] Когда определено, что на этапе S10 нет пространства для въезда, процесс переходит на этап S12. На этапе S12 контроллер 101 удерживает задействуемое транспортное средство в ожидании в предварительно определенной позиции. Например, контроллер 101 поддерживает ожидание задействуемого транспортного средства в позиции, пересекающей граничную линию полосы движения между задействуемой полосой движения и смежной полосой движения и целевой траекторией вплоть до позиции въезда.
[0100] На этапе S13 контроллер 101 определяет, истекло ли предварительно определенное время. Когда определено, что предварительно определенное время истекло, процесс переходит на этап S14, а когда определено, что предварительно определенное время не истекло, процесс возвращается на этап S10. Предварительно определенное время представляет собой время, определенное экспериментально, хотя и не ограниченное особым образом. Контроллер 101 может соответствующим образом изменить предварительно определенное время.
[0101] Когда предварительно определенное время определено как истекшее на этапе S13, процесс переходит на этап S14. На этапе S14 контроллер 101 устанавливает позицию движения задействуемого транспортного средства. Например, контроллер 101 устанавливает позицию движения задействуемого транспортного средства в предварительно определенную позицию рядом с центром задействуемой полосы движения. Когда обработка на этапе S14 завершается, процесс возвращается на этап S1, и обработка на этапе S1 и последующих этапах выполняется снова. Это позволяет контроллеру 100 транспортного средства выполнять обработку смены полосы движения, если определено, что в позиции въезда на этапе S10 нет пространства, и задействуемое транспортное средство не может сменить полосу движения, обработка смены полосы движения может быть выполнена снова.
[0102] Когда определено, что задействуемое транспортное средство не въезжает вперед другого транспортного средства для смены полосы движения на этапе S5, или когда на этапе S6 определяется отсутствие отвлекающего фактора для водителя другого транспортного средства, процесс переходит на этап S8. На этапе S8 контроллер 101 устанавливает время смены полосы движения равным предварительно определенному времени заранее. Предварительно определенное время на этом этапе такое же, как предварительно определенное время, описанное на этапе S7. Когда процесс этапа S8 заканчивается, процесс переходит на этап S9. Поскольку нижеследующее описание является таким же, за исключением того, что время смены полосы движения представляет собой время, установленное на этапе S8, приведенное выше описание будет упоминаться соответствующим образом.
[0103] Как описано выше, в способе управления задействуемым транспортным средством согласно настоящему варианту осуществления контроллер 101 получает информацию об окружающей обстановке задействуемого транспортного средства из группы 10 датчиков окружающей обстановки и коммуникатора 32, установленных в задействуемом транспортном средстве. Контроллер 101 определяет, присутствует ли отвлекающий фактор для водителя другого транспортного средства, в соответствии с информацией об окружающей обстановке, когда задействуемое транспортное средство собирается въехать вперед другого транспортного средства, движущегося по смежной полосе для смены полосы движения. После определения присутствия отвлекающего фактора контроллер 101 устанавливает время смены полосы движения, необходимое для того, чтобы задействуемое транспортное средство сменило полосу движения, более длительным, чем при определении отсутствия отвлекающего фактора, и управляет позицией движения задействуемого транспортного средства на задействуемой полосе движения в пределах времени смены полосы движения. Это дает водителю другого транспортного средства время для подтверждения поведения задействуемого транспортного средства, когда задействуемое транспортное средство собирается въехать вперед другого транспортного средства для смены полосы движения. Таким образом, вероятность того, что водитель другого транспортного средства заметит задействуемое транспортное средство до того, как задействуемое транспортное средство завершит смену полосы движения, увеличивается.
[0104] В настоящем варианте осуществления контроллер 101 устанавливает по меньшей мере одно из времени свечения указателя 80 направления во время смены полосы движения и времени, необходимого задействуемому транспортному средству для перемещения с задействуемой полосы движения на смежную полосу движения, более длительным, чем когда ни один фактор не отвлекает водителя другого транспортного средства. Это увеличивает, например, вероятность того, что водитель другого транспортного средства заметит указатель направления задействуемого транспортного средства и присутствие задействуемого транспортного средства, когда контроллер 101 установил более длительное время свечения указателя 80 направления. Кроме того, например, шанс для водителя другого транспортного средства заметить, что задействуемое транспортное средство намеревается вперед другого транспортного средства, увеличивается, когда контроллер 101 устанавливает время для задействуемого транспортного средства, чтобы двигаться, более длительным.
[0105] В настоящем варианте осуществления отвлекающие факторы для водителя другого транспортного средства включают в себя по меньшей мере одно из следующего: светофор, место дорожно-транспортного происшествия, указатель направления во время свечения, форму дороги, транспортное средство экстренной службы, звук автомобильной навигации, установленной на другом транспортном средстве, экстренная информация о землетрясении, поведение транспортного средства и форма или цвет транспортного средства. Таким образом, контроллер 101 может определить, что отвлекающий фактор для водителя другого транспортного средства присутствует, обнаруживая только один из этих факторов, который обычно влияет на операцию вождения.
[0106] Кроме того, в настоящем варианте осуществления отвлекающий фактор для водителя другого транспортного средства включает в себя впереди идущее транспортное средство другого транспортного средства в полосе движения, смежной со смежной полосой движения на противоположной стороне задействуемой полосы движения. Например, задействуемое транспортное средство может попадать в поле обзора водителя другого транспортного средства, а не только впереди идущего транспортного средства, когда задействуемое транспортное средство также предшествует другому транспортному средству. В таких случаях контроллер 101 может определить впереди идущее транспортное средство, на которое водитель обычно имеет тенденцию отвлекаться, как отвлекающий фактор для водителя.
[0107] <Второй вариант осуществления>
Будут описаны устройство управления транспортным средством и способ управления транспортным средством согласно другому варианту осуществления настоящего изобретения. В настоящем варианте осуществления некоторые функции блока 106 установок управления отличаются от функций первого варианта осуществления. В частности, способ установки времени смены полосы движения отличается от способа в первом варианте осуществления. Другие конфигурации и процессы управления такие же, как и в первом варианте осуществления, и поэтому будет сделана ссылка на приведенное выше описание.
[0108] Блок 106 установок управления настоящего варианта осуществления вычисляет вероятность того, что водитель другого транспортного средства глядит на отвлекающий фактор (в дальнейшем именуемая вероятностью взгляда). Для множества отвлекающих факторов блок 106 установок управления вычисляет вероятность взгляда для каждого фактора.
На Фиг.4 показана схема, соответствующая Фиг.3, и представляет собой пример ситуации перед тем, как задействуемое транспортное средство V перемещается с полосы L1 движения на полосу L2 движения на дороге, состоящей из 3 полос движения с одной стороны (полосы L1, полосы L2 и полосы L3) для смены полосы движения. Ситуация на Фиг.4 отличается от ситуации на Фиг.3 тем, что имеется светофор T перед транспортным средством V на полосе L1 движения. На Фиг.4 пунктирная стрелка, идущая от другого транспортного средства Y1, указывает направление взгляда водителя на другое транспортное средство Y1. На Фиг.4 предполагается, что водитель другого транспортного средства Y1 обращает внимание на все из задействуемого транспортного средства V, другого транспортного средства X1 и сигнал T. Тип отображения сигнала светофора T особо не ограничивается.
[0110] В примере на Фиг.4, блок 106 установок управления распознает, в соответствии с информацией об окружающей обстановке задействуемого транспортного средства V, что другое транспортное средство X1 предшествует другому транспортному средству Y1 и что сигнал T присутствует. Затем блок 106 установок управления определяет присутствие отвлекающего фактора для водителя другого транспортного средства Y1.
[0111] Блок 106 установок управления вычисляет вероятность взгляда водителя другого транспортного средства Y1 для каждого отвлекающего фактора для водителя другого транспортного средства Y1. Например, блок 106 установок управления получает значение вероятности взгляда, соответствующее типу отвлекающего фактора, из хранилища, такого как ROM. В таком хранилище вероятность взгляда устанавливается заранее в соответствии с типом отвлекающего фактора. В случае с Фиг.4, блок 106 установок управления вычисляет вероятность взгляда водителя другого транспортного средства Y1 по отношению к другому транспортному средству X1, получая вероятность взгляда с типом, соответствующим другому транспортному средству X1, и вычисляет вероятность взгляда водителя другого транспортного средства Y1 относительно сигнала T посредством получения вероятности взгляда с типом, соответствующим сигналу T.
[0112] Кроме того, блок 106 установок управления также вычисляет вероятность того, что водитель другого транспортного средства глядит на задействуемое транспортное средство, когда задействуемое транспортное средство также отвлекает водителя. Задействуемое транспортное средство, отвлекающее водителя другого транспортного средства, включает в себя задействуемое транспортное средство, которое опережает другое транспортное средство, в задействуемом транспортном средстве. В случае примера с Фиг.4, задействуемое транспортное средство V, предшествующее другому транспортному средству Y1 на полосе движения L1, также соответствует отвлекающему фактору другого транспортного средства Y1. Блок 106 установок управления вычисляет вероятность взгляда другого транспортного средства Y1 по отношению к другому транспортному средству X1, получая вероятность взгляда с типом, соответствующим задействуемому транспортному средству V. В примере на Фиг.4, например, блок 106 установок управления вычисляет вероятность взгляда для задействуемого транспортного средства V как 20%, вероятность взгляда для другого транспортного средства X1 как 20% и вероятность взгляда для сигнала T как 60%, так что сумма вероятностей взгляда равняется 100%.
[0113] Кроме того, блок 106 установок управления настоящего варианта осуществления устанавливает дополнительное время, соответствующее вероятности взгляда при вычисленной вероятности взгляда водителя другого транспортного средства. Например, блок 106 установок управления устанавливает дополнительное время в соответствии с вероятностью взгляда факторов, отличных от задействуемого транспортного средства, хотя это особо не ограничивается. Например, блок 106 установок управления устанавливает более длительным дополнительное время, чем выше вероятность взгляда по отношению к отвлекающему фактору. Другими словами, чем ниже вероятность взгляда для задействуемого транспортного средства, тем более длительным устанавливается время смены полосы движения. Таким образом, чем ниже вероятность для водителя другого транспортного средства заметить задействуемое транспортное средство, тем более длительным устанавливается время смены полосы движения. Это дает больше шансов заметить задействуемое транспортное средство водителю другого транспортного средства.
[0114] Например, блок 106 установок управления устанавливает дополнительное время посредством умножения отношения вероятности взгляда на отвлекающий фактор водителя другого транспортного средства и вероятности взгляда для задействуемого транспортного средства на предварительно определенную единицу времени. Предварительно определенная единица времени представляет собой время, определенное экспериментально, хотя и не ограниченное особым образом. Блок 106 установок управления может соответствующим образом изменять единицу времени. В примере на Фиг.4, например, блок 106 установок управления устанавливает дополнительное время равным 4 секундам посредством умножения вероятности взгляда (вероятность взгляда для другого транспортного средства X1: 20%, вероятность взгляда для светофора T: 60%), кроме задействуемого транспортного средства V, на 5 секунд (единицу времени). Значения вероятности взгляда, единицы времени и дополнительного времени, использованные в приведенном выше описании, являются примерами, и эти значения особо не ограничены.
[0115] Далее будет описана последовательность операций управления контроллера 101 согласно настоящему варианту осуществления со ссылкой на Фиг.5A и 5B. На Фиг.5A и на Фиг.5B показаны блок-схемы последовательности операций процесса управления, выполняемого контроллером 100 транспортного средства, согласно настоящему варианту осуществления. Вышеприведенное описание относится к тем же частям, что и последовательность операций управления согласно первому варианту осуществления.
[0116] Этапы с S21 по S26 соответствуют этапам с S1 по S6 на Фиг.2А. Описание этих этапов будет ссылаться на описание выше.
[0117] Когда на этапе S26 определяется присутствие отвлекающего фактора для водителя другого транспортного средства, процесс переходит на этап S27. На этапе S27 контроллер 101 вычисляет вероятность взгляда водителя другого транспортного средства, глядящего на отвлекающий фактор. Например, контроллер 101 получает заранее установленную вероятность взгляда в соответствии с типом отвлекающих факторов из хранилища, такого как ROM.
[0118] На этапе S28 контроллер 101 устанавливает дополнительное время в соответствии с вероятностью взгляда, вычисленной на этапе S27. Это устанавливает время смены полосы движения, соответствующее вероятности взгляда, более длительным, чем когда никакой фактор не отвлекает водителя другого транспортного средства. Например, контроллер 101 устанавливает дополнительное время, умножая вероятность взгляда водителя другого транспортного средства на заранее установленную единицу времени. Этот этап соответствует этапу S7 на Фиг.2А.
[0119] Этапы с S29 по S35 соответствуют этапам с S9 по S14 на Фиг.2B. Таким образом, описание этих этапов упомянуто выше.
[0120] Как описано выше, в способе управления транспортным средством согласно настоящему варианту осуществления контроллер 100 транспортного средства вычисляет вероятность взгляда водителя другого транспортного средства на отвлекающий фактор, чем выше вероятность взгляда, тем более длительным устанавливается время смены полосы движения. Таким образом, чем выше вероятность для водителя другого транспортного средства не заметить задействуемое транспортное средство, тем более длительным устанавливается время смены полосы движения. Это дает водителю другого транспортного средства больше шансов заметить задействуемое транспортное средство, которое намерено въехать вперед другого транспортного средства для смены полосы движения.
[0121] <Третий вариант осуществления>
Теперь будут описаны устройство управления транспортным средством и способ управления транспортным средством согласно другому варианту осуществления настоящего изобретения. В настоящем варианте осуществления некоторые функции блока 106 установок управления отличаются от функций в вышеописанном варианте осуществления. В частности, способ установки времени смены полосы движения отличается от способа в первом и втором вариантах осуществления. Другие конфигурации и обработка управления являются такими же, как в первом варианте осуществления и втором варианте осуществления, и поэтому будет сделана ссылка на приведенное выше описание.
[0122] Блок 106 установок управления настоящего варианта осуществления вычисляет степень влияния отвлекающего фактора для водителя другого транспортного средства (в дальнейшем просто называемого степенью влияния), которая представляет собой уровень влияния на операцию вождения другого транспортного средства. Для множества факторов блок 106 установок управления вычисляет степень влияния для каждого фактора.
[0123] На Фиг.6 показана схема, соответствующая Фиг.3 и 4, и представляет собой пример ситуации перед движением задействуемого транспортного средства V с полосы L1 движения на полосу L2 движения по дороге из трех полос на одной стороне (полоса L1 движения, полоса L2 движения и полоса L3 движения) для смены полосы движения. Ситуация на Фиг.6, в отличие от ситуации на Фиг.4, представляет собой ситуацию, в которой переключается отображение сигнала для сигнала T. Кроме того, в ситуации на Фиг.6, в отличие от ситуации на Фиг.4, другое транспортное средство X1 включает указатель направления на полосе L2 движения.
[0124] В примере по Фиг.6, блок 106 установок управления в соответствии с информацией об окружающей обстановке задействуемого транспортного средства V распознает, что другое транспортное средство X1 предшествует другому транспортному средству Y1 и что сигнал T присутствует. Затем блок 106 установок управления определяет присутствие отвлекающих факторов для водителя другого транспортного средства Y1.
[0125] Блок 106 установок управления вычисляет степень влияния для каждого отвлекающего фактора для водителя другого транспортного средства Y1. Например, блок 106 установок управления получает значение степени влияния, соответствующее типу отвлекающего фактора и состоянию отвлекающего фактора, из хранилища, такого как ROM. Например, такое хранилище имеет заранее установленную степень влияния в соответствии с типом отвлекающего фактора и состоянием отвлекающего фактора. В примере с Фиг.6, блок 106 установок управления вычисляет степень влияния другого транспортного средства X1 как 2,0. Разбивка степени влияния другого транспортного средства X1 составляет 1,0 по типу транспортного средства и 1,0 по состоянию указателя направления. Кроме того, блок 106 установок управления вычисляет степень влияния сигнала T как 1,5. Разбивка степени влияния сигнала Т составляет 0,8 по типу сигнала Т и 0,7 по состоянию переключения отображения сигнала.
[0126] Кроме того, блок 106 установок управления также вычисляет степень влияния задействуемого транспортного средства, когда задействуемое транспортное средство также попадает в отвлекающий фактор для водителя другого транспортного средства. В случае примера с Фиг.6, блок 106 установок управления вычисляет степень влияния V транспортного средства как 1,0. Разбивка степени влияния транспортного средства V составляет 1,0 на тип транспортного средства V.
[0127] Кроме того, в настоящем варианте осуществления, аналогично второму варианту осуществления, описанному выше, блок 106 установок управления вычисляет вероятность взгляда водителя другого транспортного средства для каждого отвлекающего фактора. Кроме того, блок 106 установок управления также вычисляет вероятность того, что водитель другого транспортного средства глядит на задействуемое транспортное средство, когда задействуемое транспортное средство также попадает под отвлекающий фактор. Для объяснения вероятности взгляда следует обратиться к вышеупомянутому объяснению.
[0128] Затем блок 106 установок управления настоящего варианта осуществления устанавливает дополнительное время в соответствии с вероятностью взгляда водителя на другое транспортное средство и степенью влияния отвлекающих факторов для водителя. В частности, блок 106 установок управления умножает вероятность взгляда водителя другого транспортного средства на степень влияния отвлекающего фактора и устанавливает дополнительное время в соответствии со значением умножения. Например, блок 106 установки управления устанавливает дополнительное время тем более длительным, чем выше значение умножения вероятности взгляда водителя и степени влияния отвлекающего фактора. То есть время смены полосы движения устанавливается тем более длительным, чем выше значение умножения. Для множества отвлекающих факторов блок 106 установок управления вычисляет значение умножения для каждого фактора. Затем блок 106 установок управления суммирует множество значений умножения. Блок 106 установок управления устанавливает дополнительное время в соответствии с суммарным значением. Например, блок 106 установок управления устанавливает дополнительное время тем более длительным, чем выше значения умножения. Это увеличивает время смены полосы движения при увеличении значений умножения.
[0129] Например, блок 106 установок управления устанавливает дополнительное время посредством умножения значения умножения вероятности взгляда и степени влияния на предварительно определенную единицу времени. Предварительно определенная единица времени представляет собой время, определенное экспериментально, хотя и не ограниченное особым образом. Блок 106 установок управления может соответствующим образом изменять единицу времени. В примере на Фиг.6, аналогично примеру на Фиг.4 предполагается, что вероятность взгляда для задействуемого транспортного средства V составляет 20%, вероятность взгляда для другого транспортного средства X1 составляет 20%, а вероятность взгляда для светофора T составляет 60%. В этом случае блок 106 установок управления умножает вероятность взгляда для другого, отличного от задействуемого транспортного средства V, на степень влияния (степень влияния транспортного средства X1: 2,0, степень влияния светофора Т: 1,5). Например, вычисляется значение умножения 20%×2,0=4,0 и значение умножения 60%×1,5=9,0. Затем блок 106 установок управления устанавливает дополнительное время равным 2,6 секунды посредством умножения значения суммы (13,0), полученной посредством суммирования множества значений умножения, на 0,2 секунды (единицу времени). Соответствующие значения вероятности взгляда, степени влияния, единицы времени и дополнительного времени, использованные в приведенном выше описании, являются примерами, и эти значения особо не ограничены.
[0130] Далее будет описана последовательность операций управления контроллером 101 согласно настоящему варианту осуществления со ссылкой на Фиг.7. На Фиг.7 показана блок-схема процесса управления, выполняемого контроллером 100 транспортного средства согласно настоящему варианту осуществления. Отметим, что приведенное выше описание относится к тем же частям, что и части последовательностей операций управления согласно первому варианту осуществления и второму варианту осуществления.
[0131] Этапы с S41 по S46 соответствуют этапам с S1 по S6 на Фиг.2А. Таким образом, описание этих этапов упомянуто выше. Этап S47 соответствует этапу S27 на Фиг.5А. Таким образом, описание этих этапов упомянуто выше.
[0132] На этапе S48 контроллер 101 вычисляет степень влияния на управление движением другого транспортного средства отвлекающим фактором для водителя другого транспортного средства. Степень влияния определяется, например, параметрами типа и состояния отвлекающего фактора. Например, контроллер 101 получает значение степени влияния, соответствующее типу отвлекающего фактора и состоянию отвлекающего фактора, из хранилища, такого как ROM.
[0133] На этапе S49 контроллер 101 устанавливает дополнительное время на основе вероятности взгляда, вычисленной на этапе S47, и степени влияния, вычисленной на этапе S48. Это устанавливает время смены полосы движения, соответствующее вероятности взгляда и степени влияния, тем более длительным, чем когда ни один фактор не отвлекает водителя другого транспортного средства. Например, контроллер 101 устанавливает дополнительное время, умножая значение умножения вероятности взгляда водителя другого транспортного средства и степени влияния отвлекающего фактора на предварительно определенную единицу времени. Этот этап соответствует этапу S7 на Фиг.2A и этапу S28 на Фиг.5А.
[0134] Этапы с S50 по S56 соответствуют этапам с S9 по S14 на Фиг.2B и этапам с S29 по S35 на Фиг.5A и 5B. Таким образом, описание этих этапов упомянуто выше.
[0135] Как описано выше, в способе управления транспортным средством согласно настоящему варианту осуществления контроллер 100 транспортного средства вычисляет степень влияния отвлекающих факторов на операцию вождения водителя другого транспортного средства. Затем, чем выше значение умножения, полученное посредством умножения вероятности взгляда и степени влияния водителя другого транспортного средства, тем более длительным контроллер 100 транспортного средства устанавливает время смены полосы движения. Это предотвращает увеличение времени смены полосы движения из-за факторов, которые мало влияют на вождение, но водитель, вероятно, будет пристально глядеть, например, на места аварии на встречных полосах. Другими словами, контроллеру 100 транспортного средства разрешено устанавливать более длительное время для факторов, которые имеют большое влияние на вождение, и водитель другого транспортного средства, вероятно, будет глядеть на них.
[0136] Кроме того, в настоящем варианте осуществления для множества отвлекающих факторов для водителя другого транспортного средства контроллер 100 транспортного средства вычисляет вероятность взгляда и степень влияния для каждого фактора и вычисляет значение умножения вероятности взгляда и степень влияния для каждого фактора. Затем контроллер 100 транспортного средства вычисляет общее значение множества умноженных значений, вычисленных для каждого фактора, и чем общее значение выше, тем более длительным устанавливает время смены полосы движения. Это позволяет установить более длительное время смены полосы движения и позволяет водителю другого транспортного средства подтверждать поведение задействуемого транспортного средства в течение более длительного времени, когда, например, существует множество отвлекающих факторов для водителя другого транспортного средства и значение умножения вероятности взгляда и степень влияния каждого фактора относительно высоки. Это позволяет увеличить вероятность того, что водитель другого транспортного средства заметит задействуемое транспортное средство в ситуации, где задействуемое транспортное средство въезжает вперед другого транспортного средства для смены полосы движения.
[0137] В настоящем варианте осуществления был описан способ установки времени смены полосы движения согласно значению умножения, полученному посредством умножения вероятности взгляда и степени влияния водителя другого транспортного средства в качестве примера, но без накладывания каких-либо ограничений. Например, время смены полосы движения может быть установлено только в соответствии со степенью влияния. Например, чем выше степень влияния, тем более длительным контроллер 100 транспортного средства устанавливает дополнительное время. Контроллер 100 транспортного средства устанавливает дополнительное время, соответствующее степени влияния, умножая единицу времени на степень влияния. Это позволяет установить более длительное время смены полосы движения как фактор, имеющий более высокую степень влияния, и увеличить время, необходимое водителю другого транспортного средства для подтверждения поведения задействуемого транспортного средства. Следовательно, разрешается увеличивать вероятность того, что водитель другого транспортного средства заметит задействуемое транспортное средство в ситуации, где задействуемое транспортное средство въезжает вперед другого транспортного средства для смены полосы движения.
[0138] Кроме того, для множества отвлекающих факторов контроллер 100 транспортного средства может устанавливать время смены полосы движения другим способом. Например, контроллер 100 транспортного средства может вычислять общее значение множества вероятностей взгляда, вычисленных для каждого фактора, и чем выше общее значение, тем более длительным устанавливается время смены полосы движения. Кроме того, например, контроллер 100 транспортного средства может вычислять общее значение множества степеней влияния, вычисленных для каждого фактора, и чем выше общее значение, тем более длительным устанавливается время смены полосы движения.
[0139] <Четвертый вариант осуществления>
Теперь будут описаны устройство управления транспортным средством и способ управления транспортным средством согласно другому варианту осуществления настоящего изобретения. В настоящем варианте осуществления контроллер 100 транспортного средства включает в себя блок 110 оценки (не показан) в отличие от вышеописанного варианта осуществления. В настоящем варианте осуществления некоторые функции блока 106 установок управления и блока 108 управления движением отличаются от функций вышеописанного варианта осуществления. В частности, по сравнению вариантами осуществления с первого по третий точка для оценки фактического поля обзора водителя другого транспортного средства и точка для установки положения для начала выполнения управления движением в соответствии с оцененным фактическим полем обзора разные. Другие конфигурации и процессы управления такие же, как и в вариантах осуществления с первого по третий, и поэтому приведенное выше описание включено сюда.
[0140] Теперь будет описана функция блока 110 оценки. Блок 110 оценки оценивает фактическое поле обзора водителя другого транспортного средства. В частности, модуль 110 оценки оценивает фактическое поле обзора водителя другого транспортного средства в соответствии с по меньшей мере одним из скорости транспортного средства другого транспортного средства, степени загруженности дороги и навыков вождения водителя. В следующих разделах описывается каждый из способов оценки фактического поля обзора. В нижеследующем описании «оценка фактической области обзора водителя» означает оценку фактического угла обзора для водителя или оценку фактической области обзора для водителя. Следовательно, «фактическое поле обзора узкое (широкое)» означает, что фактический угол обзора узкий (широкий) или фактическая область обзора узкая (широкая).
[0141] Здесь будет описано фактическое поле обзора. Поле обзора человека разделено на центральное поле обзора, расположенное в центре поля обзора, и окружающее поле обзора, окружающее центральное поле обзора. Центральное поле обзора представляет собой поле обзора в диапазоне примерно 5 градусов в горизонтальном и вертикальном направлениях. Когда человек видит объект, человеческий глаз обычно распознает объект в пределах центрального поля обзора. С другой стороны, окружающее поле обзора состоит из фактического поля обзора вокруг центрального поля обзора, устойчивого поля обзора вокруг фактического поля обзора, дополнительного поля обзора вокруг устойчивого поля обзора и т.п. При распознавании объекта в пределах фактического поля обзора человек более вероятно заметит объект, чем при распознавании объекта в окружающем поле обзора, отличном от фактического поля обзора.
[0142] Теперь будет описан способ оценки в соответствии со скоростью транспортного средства среди фактических способов оценки поля обзора. Как правило, чем выше скорость транспортного средства, тем более узкое поле обзора для водителя. Это связано с тем, что чем выше скорость транспортного средства, тем тщательнее водитель выполняет операцию вождения и тем более утомительной является операция вождения. По мере того, как управление транспортным средством становится утомительным, фактическое поле обзора водителя сужается.
[0143] Блок 110 оценки оценивает тем более узким фактическое поле обзора водителя другого транспортного средства, чем выше скорость транспортного средства другого транспортного средства. Например, модуль 110 оценки распознает относительную скорость другого транспортного средства по отношению к задействуемому транспортному средству в соответствии с результатом обнаружения радара 11 или межмашинной связи и распознает текущую скорость транспортного средства другого транспортного средства по скорости транспортного средства. задействуемого транспортного средства. Блок 110 оценки получает карту, указывающую взаимосвязь между скоростью транспортного средства и фактическим углом обзора, из хранилища, такого как ROM, и вычисляет значение фактического угла обзора, соответствующего текущей скорости транспортного средства другого транспортного средства, посредством обращения к карте. Это позволяет блоку 110 оценки оценивать фактическое поле обзора водителя другого транспортного средства в соответствии со скоростью транспортного средства другого транспортного средства. Взаимосвязь между скоростью транспортного средства и фактическим углом обзора может включать в себя пропорциональную зависимость, в которой чем выше скорость транспортного средства, тем уже фактический угол обзора.
[0144] Далее будет описан способ оценки фактического угла обзора в соответствии со степенью загруженности дороги. Дорога может включать в себя указанную полосу движения и смежную полосу движения. Как правило, чем выше степень загруженности дороги, тем меньше поле обзора для водителя. Это связано с тем, что по мере того, как расстояние между транспортного средствами уменьшается, тем тщательнее водитель выполняет операцию вождения, тем более утомительной становится операция вождения. По мере того, как управление транспортным средством становится утомительным, фактическое поле обзора водителя сужается.
[0145] Блок 110 оценки оценивает тем более узким фактическое поле обзора водителя другого транспортного средства, чем выше степень загруженности дороги. Например, модуль 110 оценки распознает количество других транспортных средств, которые задействуемое транспортное средство проезжает за единицу времени, в соответствии с результатом обнаружения радаром 11 или изображением, захваченным устройством 12 формирования изображений. Блок 110 оценки получает карту, указывающую взаимосвязь между количеством других транспортных средств и фактическим углом обзора из хранилища, такого как ROM, и вычисляет значение фактического угла обзора, соответствующего количеству других транспортных средств, посредством обращения к карте. Поскольку степень загруженности дороги тем выше, чем больше количество других транспортных средств, то фактическое поле обзора водителя других транспортных средств в соответствии со степенью загруженности дороги может быть оценено посредством вычисления фактического угла обзора, соответствующего количеству других транспортных средств. Взаимосвязь между степенью загруженности дороги и фактическим углом обзора не ограничивается пропорциональной зависимостью, в которой фактический угол обзора становится уже, когда степень загруженности дороги становится выше.
[0146] Между прочим, информация, используемая для оценки степени загруженности дороги, не ограничивается информацией о количестве других транспортных средств, которые задействуемое транспортное средство проезжает за единицу времени, как это описано выше. Например, может использоваться информация о заторах, информация о средней скорости транспортного средства для других транспортных средств или задействуемого транспортного средства в предварительно определенном участке. Например, модуль 110 оценки получает информацию о расстоянии до загруженности дороги от VICS и вычисляет значение фактического угла обзора, соответствующего расстоянию до загруженности дороги. Поскольку степень загруженности дороги тем выше, чем более длительным расстояние до загруженности дороги, фактическое поле обзора водителя других транспортных средств в соответствии со степенью загруженности дороги может быть оценено посредством вычисления фактического угла поля обзора, соответствующего расстоянию загруженности дороги. Кроме того, например, модуль 110 оценки может получать информацию о средней скорости транспортного средства участка с другими транспортными средствами от VICS и вычислять значение фактического угла обзора, соответствующего средней скорости транспортного средства других транспортных средств. Кроме того, например, модуль 110 оценки может получить информацию о средней скорости транспортного средства задействуемого транспортного средства в предварительно определенном участке от датчика 21 скорости транспортного средства и вычислить значение фактического угла обзора, соответствующего средней скорости транспортного средства обследуемого транспортного средства. Кроме того, например, модуль 110 оценки может получать информацию о расстоянии между транспортными средствами между задействуемым транспортным средством и впереди идущим транспортным средством и о расстоянии между транспортными средствами между задействуемым транспортным средством и задним транспортным средством от радара 11 и может вычислять фактический угол обзора, соответствующий расстоянию между транспортного средствами. Поскольку степень загруженности дороги тем выше, чем медленнее средняя скорость транспортного средства в целом или данного транспортного средства, то фактическое поле обзора водителя другого транспортного средства в соответствии со степенью загруженности дороги может быть оценено посредством вычисления фактического угла обзора, соответствующего средней скорости транспортного средства. Кроме того, поскольку степень загруженности дороги тем выше, чем меньше расстояние между транспортными средствами, вычисление фактического угла обзора, соответствующего расстоянию между транспортными средствами, позволяет оценить фактический обзор водителя другого транспортного средства в соответствии со степенью загруженности дороги.
[0147] Теперь будет описан способ оценки фактического угла обзора в соответствии с навыками вождения водителя. Как правило, чем ниже навыки вождения, тем более узким становится поле обзора у водителя. Это связано с тем, что чем ниже навык вождения, тем тщательнее водитель выполняет операцию вождения и тем более утомительной становится операция вождения. По мере того, как управление транспортным средством становится утомительным, фактическое поле обзора водителя сужается.
[0148] Блок 110 оценки оценивает тем более узким фактическое поле обзора водителя другого транспортного средства, чем ниже навыки вождения водителя другого транспортного средства. Например, модуль 110 оценки получает информацию об угле рулевого управления рулевого управления, установленного на другом транспортном средстве, посредством связи между транспортными средствами и распознает диапазон угла рулевого управления в единицу времени. Это позволяет распознавать, насколько водитель другого транспортного средства управляет рулевым управлением при движении по прямой дороге, когда, например, другое транспортное средство движется по прямой дороге. Блок 110 оценки получает карту, указывающую взаимосвязь между диапазоном угла рулевого управления в единицу времени и фактическим углом обзора из хранилища, такого как, например, ROM, и вычисляет значение фактического угла обзора, соответствующее диапазону угла рулевого управления в единицу времени по карте. Вычисление фактического угла обзора, соответствующего диапазону угла поворота рулевого управления в единицу времени, позволяет оценить фактическое поле обзора водителя другого транспортного средства в соответствии со степенью загруженности дороги в соответствии со знанием того, что водительские навыки вождения тем ниже, чем шире диапазон угла рулевого управления в единицу времени. Поскольку взаимосвязь между диапазоном угла рулевого управления в единицу времени и фактическим углом обзора не ограничивается пропорциональной взаимосвязью, в которой чем шире диапазон угла рулевого управления, тем уже фактический угол обзора.
[0149] Блок 106 установок управления настоящего варианта осуществления в соответствии с фактическим полем обзора водителя другого транспортного средства устанавливает начальную позицию для начала выполнения управления движением задействуемого транспортного средства. Управление движением задействуемого транспортного средства представляет собой управление свечением и управление сменой полосы движения указателя направления, выполняемое блоком 108 управления движением. В частности, в настоящем варианте осуществления блок 106 установок управления устанавливает начальную позицию так, чтобы расстояние между другим транспортным средством и начальной позицией становилось тем большим, чем уже фактическое поле обзора водителя другого транспортного средства. В настоящем варианте осуществления блок 106 установок управления устанавливает переднюю позицию по отношению к другому транспортному средству на задействуемой полосе в качестве начальной позиции. То есть блок 106 установок управления устанавливает начальную позицию таким образом, чтобы предшествующее расстояние задействуемого транспортного средства по отношению к другому транспортному средству становилось тем большим, чем уже фактическое поле обзора водителя другого транспортного средства.
[0150] Например, блок 106 установок управления получает карту, указывающую взаимосвязь между фактическим полем обзора и расстоянием от другого транспортного средства до начальной позиции, из хранилища, такого как ROM, и вычисляет расстояние, соответствующее фактическому полю обзора водителя другого транспортного средства по карте. Затем блок 106 установок управления устанавливает начальную позицию так, чтобы передний конец задействуемого транспортного средства предшествовал переднему концу другого транспортного средства на вычисленное расстояние. Взаимосвязь между расстоянием между фактическим полем обзора и начальной позицией может быть пропорциональной взаимосвязью, так что расстояние от другого транспортного средства с сужением фактического поле обзора к начальной позиции увеличивается, но не ограничивается этим.
[0151] На Фиг.8 показана схема, поясняющая взаимосвязь между фактическим полем обзора и начальной позицией. На Фиг.8A и 8B показаны ситуации, в которых задействуемое транспортное средство V переходит с полосы L1 движения на полосу L2 движения на дороге, состоящей из 3 полос движения с одной стороны (полоса L1 движения, полосы L2 движения и полосы L3 движения). Транспортные средства, движущиеся по полосе L2 движения, представляют собой другое транспортное средство X2, предшествующее другому транспортному средству Y1, и другое транспортное средство Y1. Транспортные средства, движущиеся по полосе L3 движения, представляют собой другое транспортное средство X3, предшествующее другому транспортному средству X1, и другое транспортное средство X1. Остальные точки такие же, как на Фиг.3, 4 и 6, и, таким образом, приведенное выше описание включено сюда в качестве ссылки. Отметим, что фактическое поле обзора водителя другого транспортного средства Y1, фактическое поле обзора, показанное на Фиг.8A, предполагается более широким, чем фактическое поле обзора на Фиг.8B. В частности, фактический угол обзора альфа 1 шире, чем фактический угол обзора альфа 2. Фактическое поле обзора R1 шире, чем фактическое поле обзора R2. На Фиг.8A и 8B, фактическое поле обзора представлено треугольной формой, но это пример способа представления фактического поля обзора, и форма фактического поля обзора не ограничивается треугольной формой на виде сверху.
[0152] В примере на Фиг.8A, блок 106 установок управления устанавливает начальную позицию так, чтобы передний конец задействуемого транспортного средства V находился на расстоянии D1 от переднего конца другого транспортного средства Y1. Расстояние D1 представляет собой расстояние между другим транспортным средством Y1 и задействуемым транспортным средством V, вычисленное в соответствии с фактическим полем обзора водителя другого транспортного средства Y1 на Фиг.8А. Кроме того, в примере на Фиг.8B, блок 106 установок управления устанавливает начальную позицию так, чтобы передний конец задействуемого транспортного средства V находился на расстоянии D2 от переднего конца другого транспортного средства Y1. Расстояние D2 представляет собой расстояние между другим транспортным средством Y1 и задействуемым транспортным средством V, вычисленное в соответствии с фактическим полем обзора водителя другого транспортного средства Y1 на Фиг.8B. Как показано на Фиг.8A и на Фиг.8B, начальная позиция задается так, чтобы она предшествовало другому транспортному средству Y1 с сужением фактического поля обзора водителя другого транспортного средства Y1.
[0153] Блок 108 управления движением настоящего варианта осуществления начинает управление движением задействуемого транспортного средства, когда задействуемое транспортное средство достигает начальную позицию, установленную блоком 106 установок управления. В частности, блок 108 управления движением выполняет управление свечением указателя направления в момент времени, когда задействуемое транспортное средство достигло начальной позиции.
[0154] Далее будет описана последовательность операций управления контроллера 101 согласно настоящему варианту осуществления со ссылкой на Фиг.9A и 9B. На Фиг.9A и на Фиг.9B показаны блок-схемы последовательности операций процесса управления, выполняемого контроллером 100 транспортного средства согласно настоящему варианту осуществления. Вышеприведенное описание относится к тем же частям, что и обработка управления транспортным средством согласно вариантам осуществления с первого по третий.
[0155] Этапы с S61 по S68 соответствуют этапам с S1 по S8 на Фиг.2А. Таким образом, описание этих этапов упомянуто выше.
[0156] На этапе S69 контроллер 101 оценивает фактическое поле обзора водителя другого транспортного средства в соответствии с по меньшей мере одним из скорости транспортного средства другого транспортного средства, степени загруженности дороги и навыков водителя другого транспортного средства. Например, контроллер 101 распознает скорость транспортного средства другого транспортного средства в соответствии с результатом обнаружения радара 11. Контроллер 101 оценивает фактическое поле обзора водителя другого транспортного средства в соответствии со скоростью транспортного средства другого транспортного средства, обращаясь к предварительно сохраненной карте. Контроллер 101 оценивает тем более узким фактическое поле обзора водителя другого транспортного средства, чем выше скорость транспортного средства другого транспортного средства.
[0157] На этапе S70 контроллер 101 в соответствии с фактическим полем обзора водителя другого транспортного средства, оцененным на этапе S69, устанавливает начальную позицию, чтобы начать выполнение управления движением. Например, контроллер 101 вычисляет расстояние от другого транспортного средства до задействуемого транспортного средства в соответствии с фактическим полем обзора водителя другого транспортного средства, обращаясь к предварительно сохраненной карте. Контроллер 101, например, устанавливает начальную позицию так, чтобы передняя часть транспортного средства опережала переднюю часть другого транспортного средства на вычисленное расстояние. Контроллер 101 устанавливает начальную позицию в полосе движения.
[0158] На этапе S71 контроллер 101 определяет, достигло ли задействуемое транспортное средство начальную позицию, установленную на этапе S70. Когда определено, что задействуемое транспортное средство достигло начальную позицию, процесс переходит на этап S72. С другой стороны, когда определено, что задействуемое транспортное средство не достигло начальную позицию, процесс ожидает на этапе S71. Контроллер 101 управляет движением задействуемого транспортного средства так, чтобы достичь начальную позицию задействуемого транспортного средства после завершения обработки этапа S70, хотя это опущено в блок-схеме на фиг.8. В частности, когда задействуемое транспортное средство движется впереди начальной позиции, контроллер 101 управляет скоростью транспортного средства задействуемого транспортного средства так, чтобы она становилась ниже по сравнению со скоростью транспортного средства другого транспортного средства. Это позволяет задействуемому транспортному средству смещаться назад относительно другого транспортного средства и достигать стартовой позиции из позиции впереди, чем начальная позиция. С другой стороны, когда задействуемое транспортное средство движется за начальной позицией, контроллер 101 управляет скоростью транспортного средства задействуемого транспортного средства, так чтобы она была выше по сравнению со скоростью транспортного средства другого транспортного средства. Это позволяет задействуемому транспортному средству смещаться вперед относительно другого транспортного средства и достигать стартовой позиции из позиции за стартовой позицией.
[0159] Когда определено, что задействуемое транспортное средство достигло начальную позицию на этапе S71, процесс переходит на этап S72. Этапы с S72 по S76 соответствуют этапам с S9 по S14 на Фиг.2А. Таким образом, описание этих этапов будет упомянуто выше.
[0160] Как описано выше, в способе управления транспортным средством согласно настоящему варианту осуществления, контроллер 100 транспортного средства оценивает фактическое поле обзора водителя другого транспортного средства в соответствии с по меньшей мере одним из скорости транспортного средства другого транспортного средства, степени загруженности дороги и водительского навыка другого транспортного средства. Контроллер 100 транспортного средства устанавливает начальную позицию для начала выполнения управления движением задействуемого транспортного средства, так что чем уже оцененное фактическое поле обзора, тем более длительным является расстояние, на которое задействуемое транспортное средство движется впереди другого транспортного средства. Затем, когда задействуемое транспортное средство достигло начальной позиции, контроллер 100 транспортного средства запускает управление свечением указателя направления. Это позволяет повысить вероятность свечения указателя направления транспортного средства в пределах фактического поля обзора водителя другого транспортного средства. Это позволяет увеличить вероятность того, что водители другого транспортного средства будут знать, что их транспортное средство собирается перестроиться в другую полосу движения.
[0161] Следует принимать во внимание, что описанные ранее варианты осуществления описаны для облегчения понимания настоящего изобретения и не описаны для ограничения настоящего изобретения. Следовательно, предполагается, что факторы, раскрытые в вышеупомянутых вариантах осуществления, включают в себя все конструктивные изменения и эквиваленты, попадающие в технический объем настоящего изобретения.
[0162] Например, блок 108 управления движением может выполнять другие элементы управления для смены полосы движения в дополнение к управлению свечением указателя направления и управлению сменой полосы движения. Например, модуль 108 управления движением может управлять движением задействуемого транспортного средства, чтобы оно переместилось на сторону смежной полосы движения относительно центральной линии задействуемой полосы движения вдоль направления движения задействуемого транспортного средства. Например, блок 108 управления движением может выполнять каждое управление в порядке управления перемещения на сторону, управления свечением указателя направления и управления сменой полосы движения для смены полосы движения задействуемого транспортного средства. В этом случае время смены полосы движения включает в себя время свечения указателя 80 направления, расположенного на стороне смежной полосы движения, время, необходимое для перемещения задействуемого транспортного средства с полосы движения задействуемого транспортного средства к позиции въезда, время, необходимое для перемещения задействуемого транспортного средства на сторону смежной полосы движения, и время, необходимое для движения с нахождением задействуемого транспортного средства на стороне соседней полосы движения.
[0163] Кроме того, например, блок 106 установок управления может устанавливать время свечения (первое время) указателя 80 направления, имеющегося на стороне смежной полосы движения, когда определено, что в позиции въезда нет пространства для въезда. Например, блок 106 установок управления может устанавливать более длительным время свечения указателя 80 направления, когда блок 107 определения присутствия определяет заранее, что в позиции въезда нет пространства для въезда. Время смены полосы движения устанавливается более длительным, чем в случае когда никакие факторы не отвлекают водителя другого транспортного средства. Это позволяет увеличить вероятность того, что водители другого транспортного средства будут осведомлены о том, что данное транспортное средство собирается сменить полосу движения. Таким образом, например, может быть увеличена вероятность того, что водитель другого транспортного средства займет пространство для въезда в позиции въезда.
[0164] Например, при определении того, что некоторый фактор отвлекает водителя другого транспортного средства, блок 106 установок управления может установить более длительным по меньшей мере одно из времени свечения указателя 80 направления (первое время), времени, необходимом для перемещения задействуемого транспортного средства с задействуемой полосы движения к позиции въезда, указанной на смежной полосе движения (четвертое время), времени, необходимом для перемещения задействуемого транспортного средства к стороне смежной полосы движения (второе время), и времени, в течение которого задействуемое транспортное средство перемещается с нахождением на стороне смежной полосы движения (третье время). Это позволяет установить время смены полосы движения более длительным, чем в случае когда ни один фактор не отвлекает водителя другого транспортного средства, когда присутствуют отвлекающие факторы для водителя другого транспортного средства.
[0165] Кроме того, дополнительное время может быть установлено в соответствии с разностью скоростей между впереди идущим транспортным средством и задействуемым транспортным средством, когда впереди идущее транспортное средство движется по полосе, смежной с смежной полосой движения, и на противоположной стороне указанной полосы движения на дороге с тремя и более полосами движения. Например, когда разность скоростей между скоростью транспортного средства задействуемого транспортного средства и скоростью транспортного средства впереди идущего транспортного средства находится в пределах предварительно определенного диапазона, блок 106 установок управления может установить более длительным дополнительное время по сравнению со случаем, когда разность скоростей находится за пределами предварительно определенного диапазона. Когда разность скоростей находится в пределах предварительно определенного диапазона, относительная позиционная взаимосвязь между задействуемым транспортным средством и впереди идущим транспортным средством не изменяется кардинально в соответствии с истекшим временем. Кроме того, водитель может отвлекать внимание от задействуемого транспортного средства, когда разность скоростей находится за пределами предварительно определенного диапазона. Таким образом, водители другого транспортного средства могут уделять одинаковое внимание задействуемому транспортному средству и впереди идущему транспортному средству. Когда разность скоростей находится в пределах предварительно определенного диапазона, установка времени смены полосы движения более длительным, чем когда разность скоростей находится за пределами предварительно определенного диапазона, увеличивает вероятность того, что водитель другого транспортного средства заметит задействуемое транспортное средство.
[0166] Кроме того, состояние другого транспортного средства может отвлекать водителя другого транспортного средства в дополнение к факторам, не связанным с другим транспортным средством. Например, отвлекающие факторы для водителя другого транспортного средства могут включать в себя скорость транспортного средства другого транспортного средства, поскольку чем выше скорость, тем более осторожно действует водитель и водитель, вероятно, отвлечется. Например, когда скорость транспортного средства другого транспортного средства выше, чем предварительно определенное пороговое значение, блок 105 определения может определить, что некоторый фактор отвлекает водителя другого транспортного средства. В этом случае время смены полосы движения устанавливается более длительным, чем когда ни один фактор не отвлекает водителя другого транспортного средства. Предварительно определенное пороговое значение является экспериментально определенным значением.
[0167] Свечение указателя направления, имеющегося на стороне, противоположной задействуемой полосе движения, может отвлекать водителя другого транспортного средства. Это соответствует тому, что водитель другого транспортного средства при смене полосы движения другого транспортного средства, вероятно, обратит внимание на смену полосы движения по сравнению с задействуемым транспортным средством. Например, блок 105 определения может определить, что фактор отвлекает водителя другого транспортного средства, когда включается указатель направления другого транспортного средства, имеющийся на стороне, противоположной задействуемой полосе движения. В этом случае время смены полосы движения устанавливается более длительным, чем когда ни один фактор не отвлекает водителя другого транспортного средства.
[0168] Кроме того, способ оценки фактического поля обзора может включать в себя другой способ в дополнение к способам, описанным в четвертом варианте осуществления. Например, модуль 110 оценки может оценивать фактическое поле обзора водителя другого транспортного средства в соответствии с по меньшей мере одним из формы дороги, информации о погоде и информации о времени.
[0169] Например, блок 110 оценки может оценивать фактическое поле обзора водителя другого транспортного средства, тем более узким, чем в случае двух полос движения на одной стороне, включающей в себя задействуемую полосу движения и смежную полосу движения, когда дорога включает в себя три полосы движения на одной стороне со смежной полосой движения, расположенной по центру. Это связано с тем, что водитель другого транспортного средства более осторожно ведет себя на дороге с 3 полосами движения по сравнению с движением по дороге с двумя полосами движения, тогда операция вождения становится более сложной. Чем более утомительной становится операция вождения, тем уже становится фактическое поле обзора водителя. В дополнение к трем полосам движения с одной стороны, например, форма дороги может быть кривой или туннелем. Например, блоком 110 оценки, когда транспортное средство движется по кривой или туннелю, по сравнению со случаем, когда транспортное средство движется по другим дорогам, фактическое поле обзора водителя другого транспортного средства может быть оценено более узким.
[0170] Кроме того, модуль 110 оценки может оценивать фактическое поле обзора водителя другого транспортного средства, более узким, когда погода дождливая, по сравнению со случаем, когда погода ясная. Это связано с тем, что в дождливую погоду водитель другого транспортного средства выполняет операцию вождения более осторожно, чем в ясную погоду, операция вождения становится более утомительной. По мере того, как управление транспортным средством становится утомительным, фактическое поле обзора водителя сужается.
[0171] Кроме того, например, когда часовой пояс соответствует ночи, модуль 110 оценки может оценивать фактическое поле обзора водителя другого транспортного средства более узким, чем когда часовой пояс соответствует иному времени суток, чем ночь (утро, полдень и вечер). Это связано с тем, что водитель другого транспортного средства более тщательно выполняет операцию вождения ночью по сравнению с днем, и, таким образом, операция вождения становится более утомительной. По мере того, как управление транспортным средством становится утомительным, фактическое поле обзора водителя сужается.
[0172] Кроме того, фактическое поле обзора водителя другого транспортного средства может отражаться в вероятности взгляда водителя другого транспортного средства.
Например, если блок 106 установок управления определяет, что фактор, не находящийся внутри фактического поля обзора водителя, отвлекает водителя, то этот фактор может быть исключен из факторов, отвлекающих водителя. Например, блок установок управления может вычислить вероятность взгляда водителя другого транспортного средства с учетом фактора, не находящегося внутри фактического поля обзора, посредством вычитания предварительно определенного значения из предварительно определенного значения вероятности взгляда. Таким образом, отражение фактического поля обзора водителя другого транспортного средства в вероятность взгляда водителя другого транспортного средства позволяет повысить точность вычисления вероятности взгляда. Это позволяет повысить вероятность того, что водители другого транспортного средства заметят присутствие их задействуемых транспортных средств.
[0173] Например, в данном документе устройство управления транспортным средством согласно настоящему изобретению описано на примере контроллера 100 транспортного средства, но настоящее изобретение этим не ограничивается. Кроме того, в данном документе первая полоса движения в соответствии с настоящим изобретением описана как пример задействуемой полосы будет, но настоящее изобретение этим не ограничивается. Кроме того, в данном документе вторая полоса движения согласно настоящему изобретению описана как пример смежной полосы движения, но настоящее изобретение этим не ограничивается. Кроме того, в данном документе блок получения информации в соответствии с настоящим изобретением описан с использованием блока 102 получения информации в качестве примера, но настоящее изобретение этим не ограничивается. Кроме того, в данном документе блок определения согласно настоящему изобретению описан с использованием блока 105 определения в качестве примера, но настоящее изобретение этим не ограничивается. В данном документе блок установки согласно настоящему изобретению описан на примере блока 106 установки управления, но настоящее изобретение этим не ограничивается. В данном документе блок управления движением согласно настоящему изобретению описан на примере блока 108 управления движением, но настоящее изобретение этим не ограничивается.
[ПОЯСНЕНИЯ БУКВЕННЫХ ИЛИ ЦИФРОВЫХ ОБОЗНАЧЕНИЙ]
[0174]
10... Группа датчиков окружающей обстановки
11... Радар
12... Устройство формирования изображений
20... Группа датчиков транспортного средства
21... Датчик скорости транспортного средства
22... Акселерометр
23... Гироскопический датчик
24... Датчик угла рулевого управления
25... Датчик акселератора
26... Датчик тормоза
30... Навигационная система
31... GPS
32... Коммуникатор
33... Навигационный контроллер
40... База данных карт
50... HMI
60... Контроллер исполнительных механизмов
70... Группа исполнительных механизмов транспортного средства
71... Исполнительный механизм рулевого управления
72... Исполнительный механизм акселератора
73... Исполнительный механизм управления тормозом
80... Указатель направления
100... Контроллер транспортного средства
101... Блок управления
102... Блок получения
103... Блок распознавания ситуации
104... Блок задания
105... Блок определения
106... Блок установок управления
107... Блок определения присутствия пространства
108... Блок управления движением
200... Система транспортного средства.
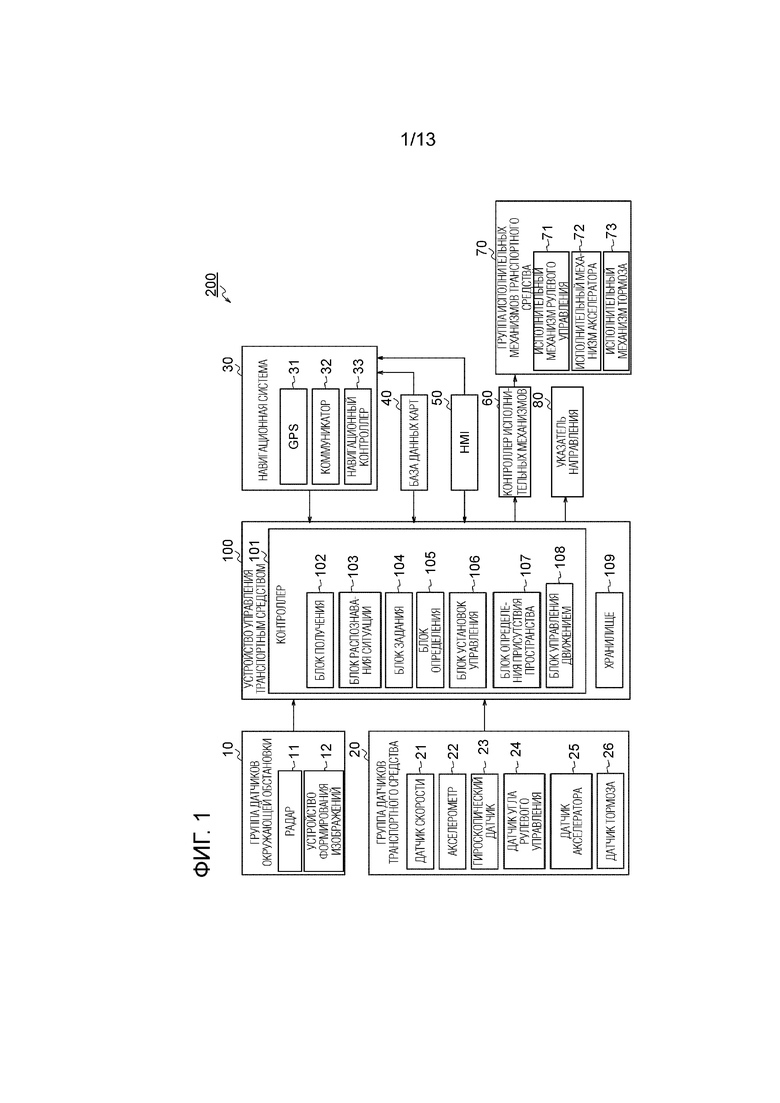
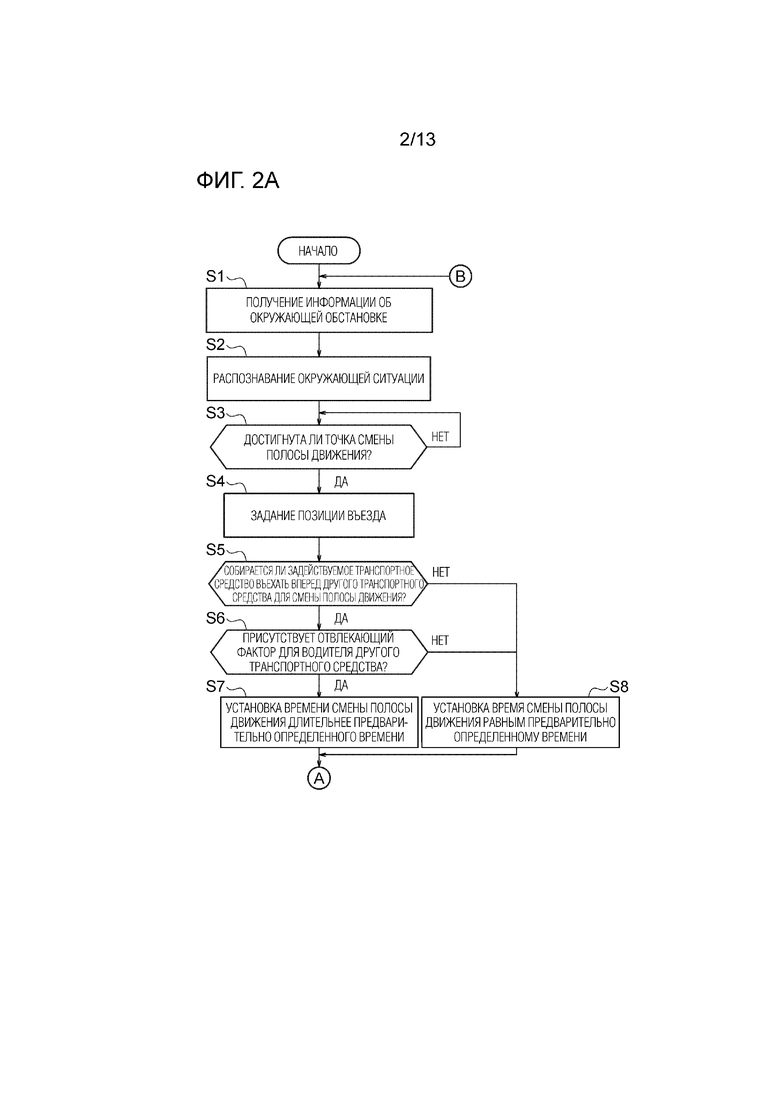
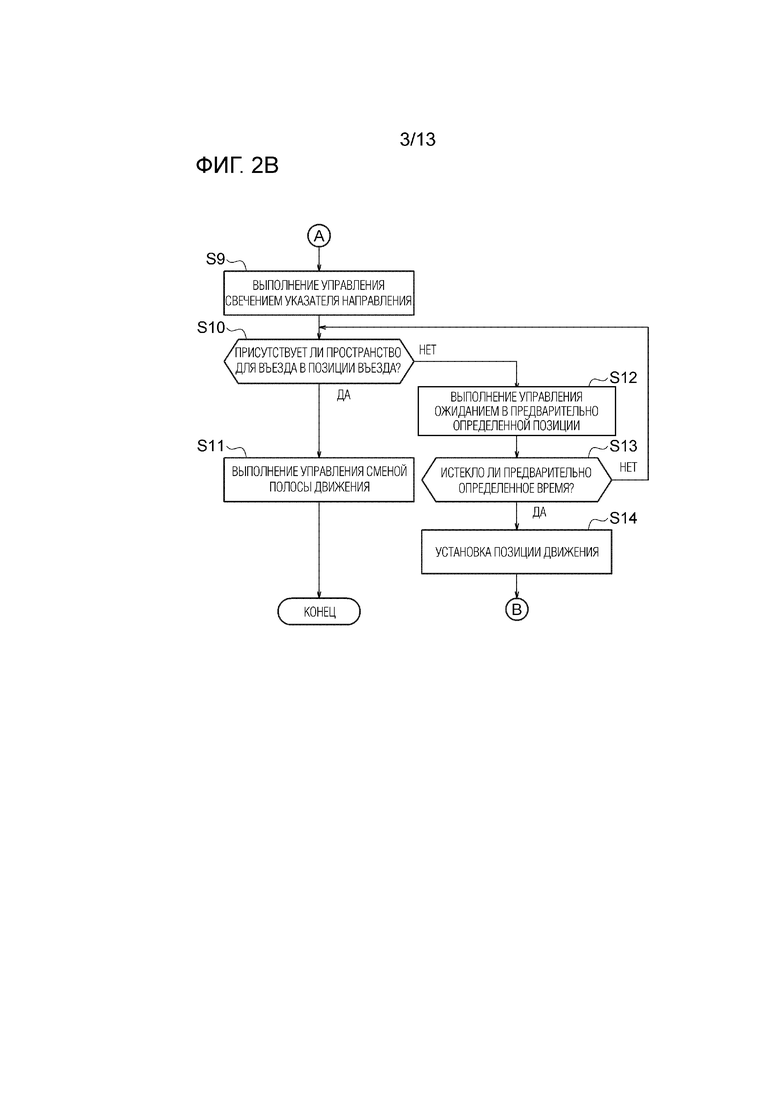
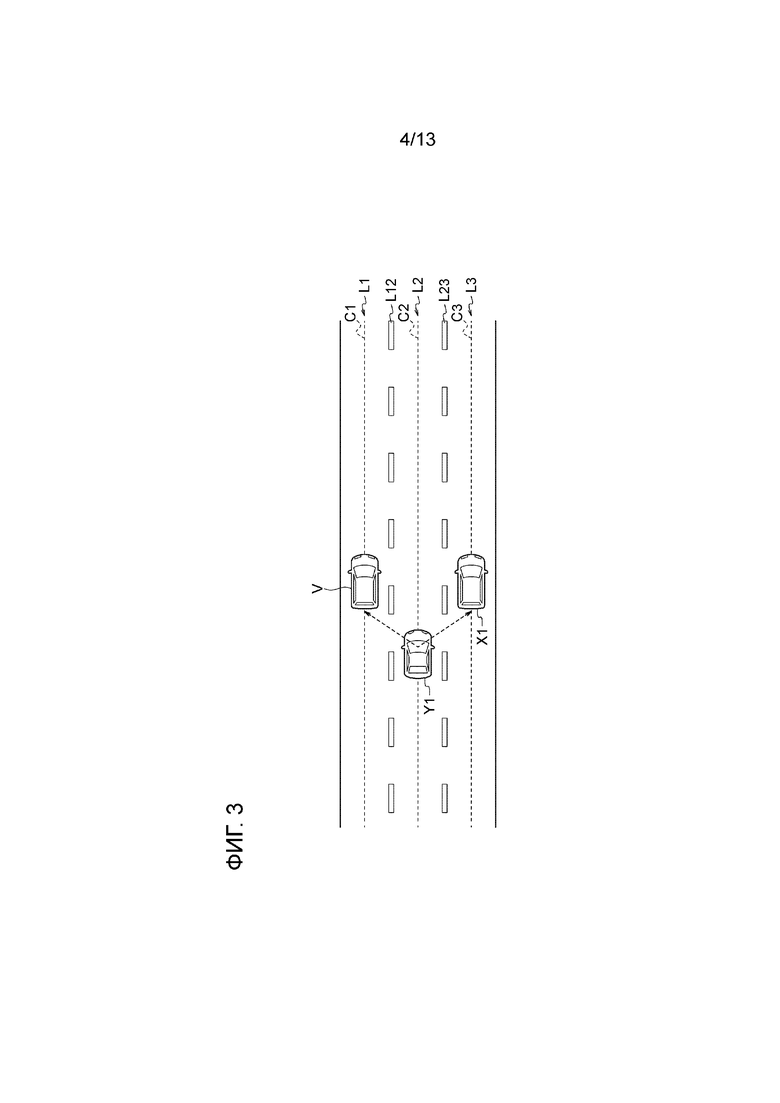
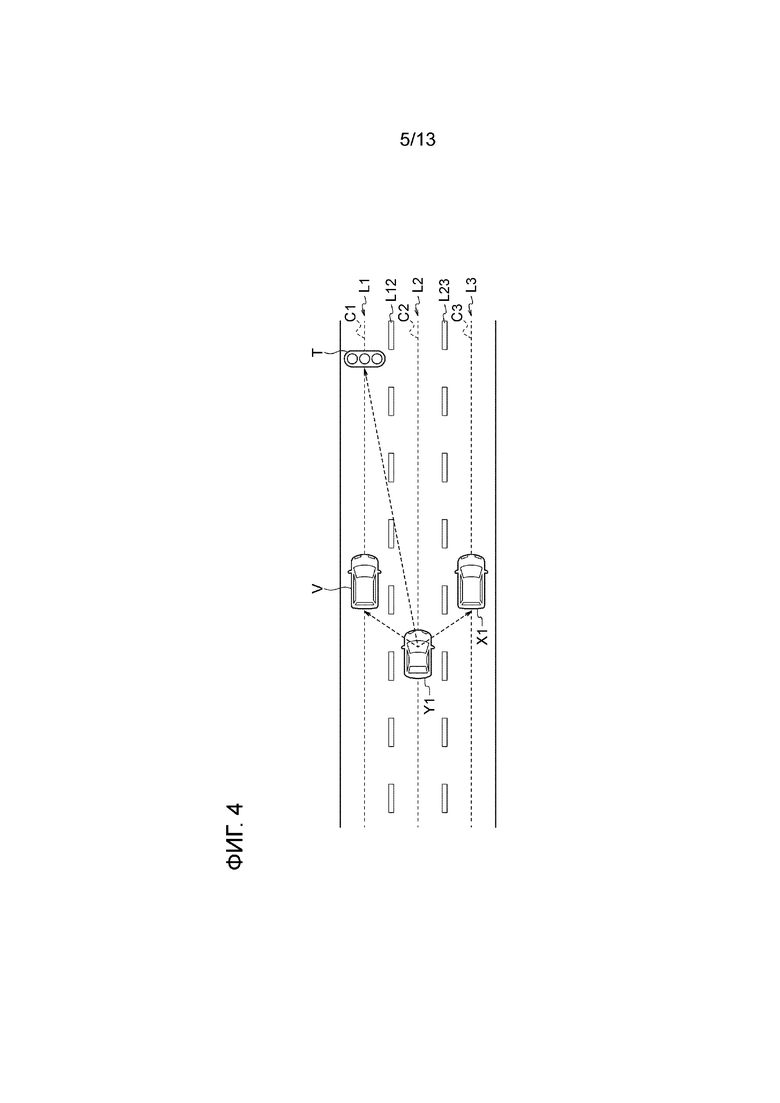
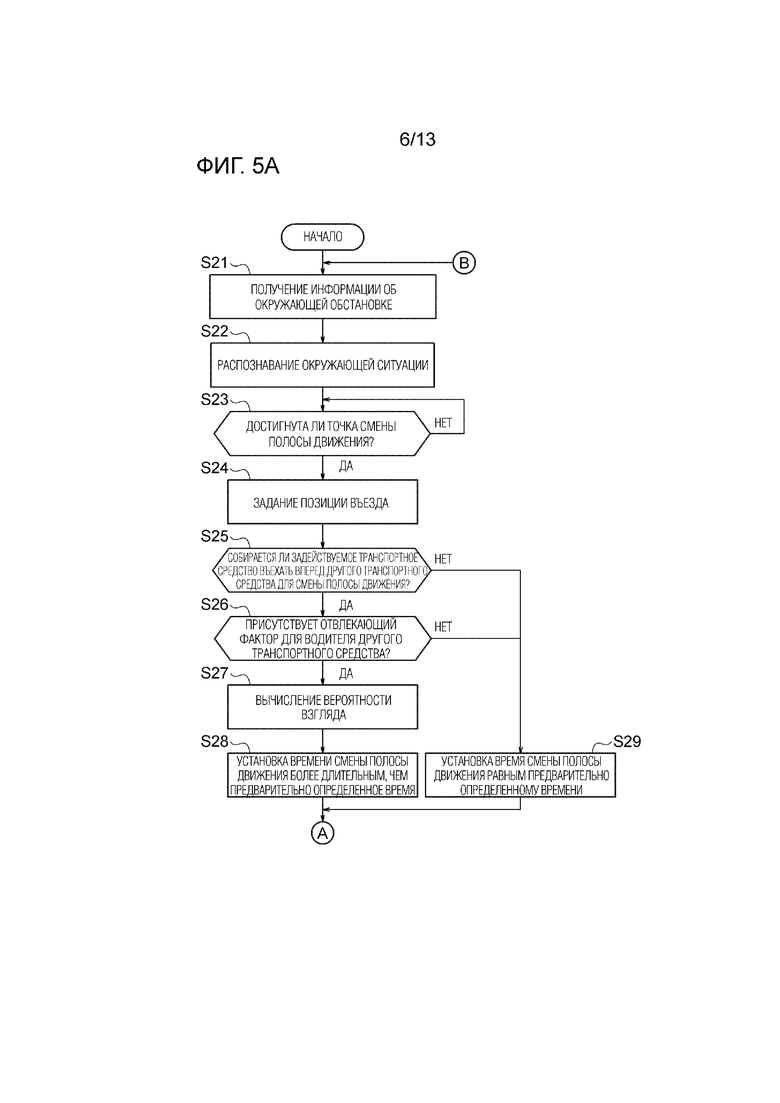
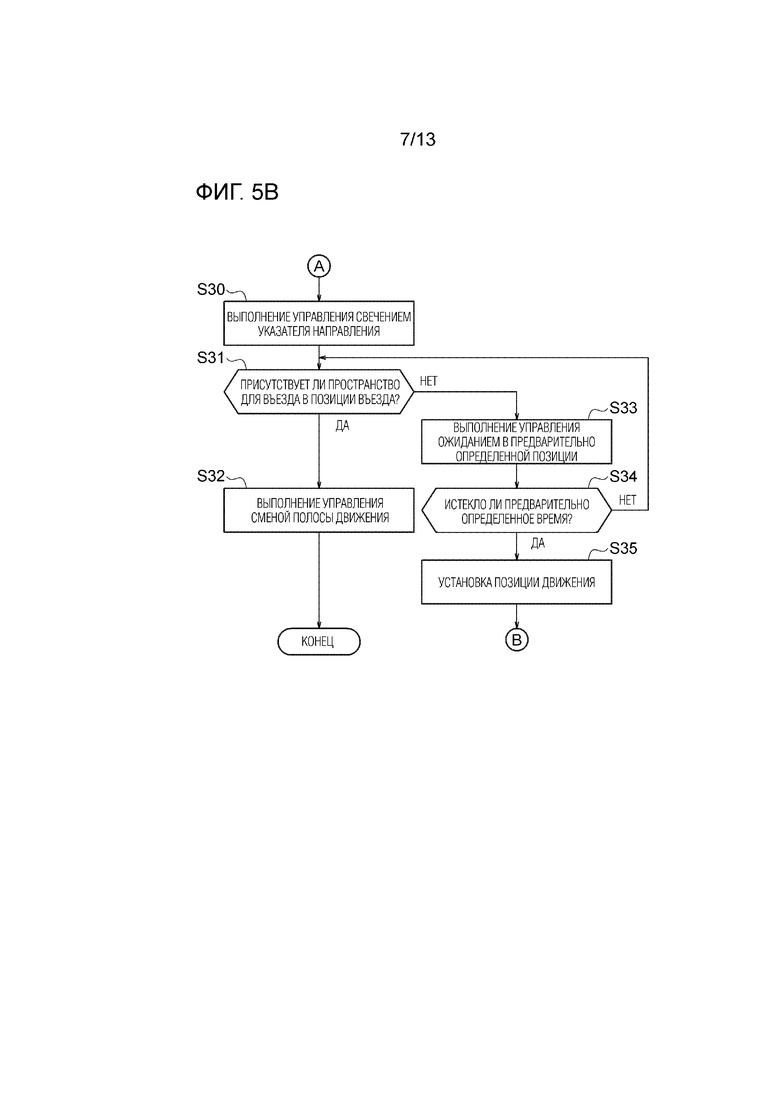
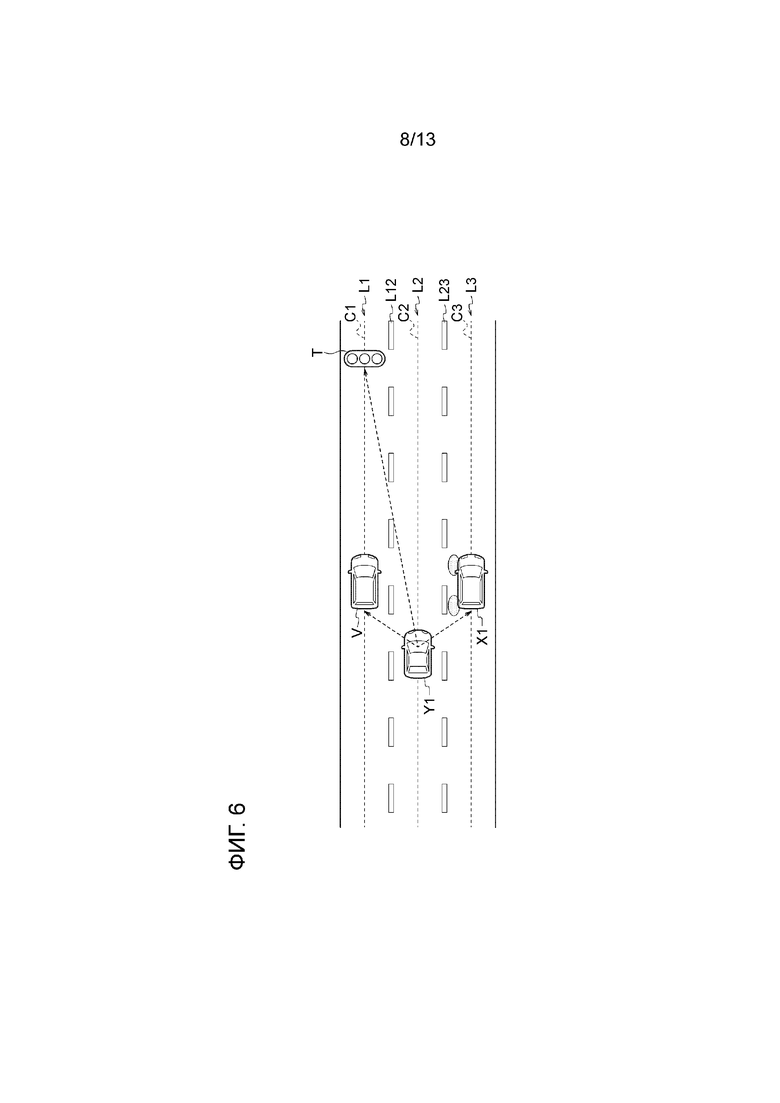
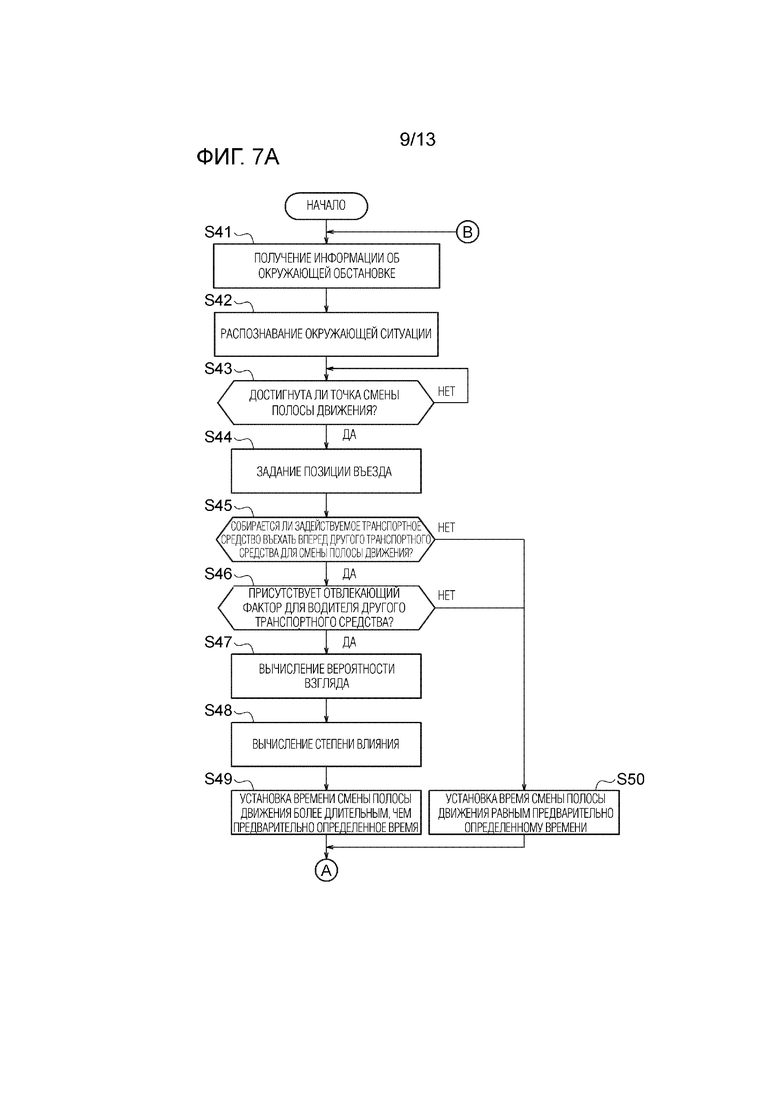
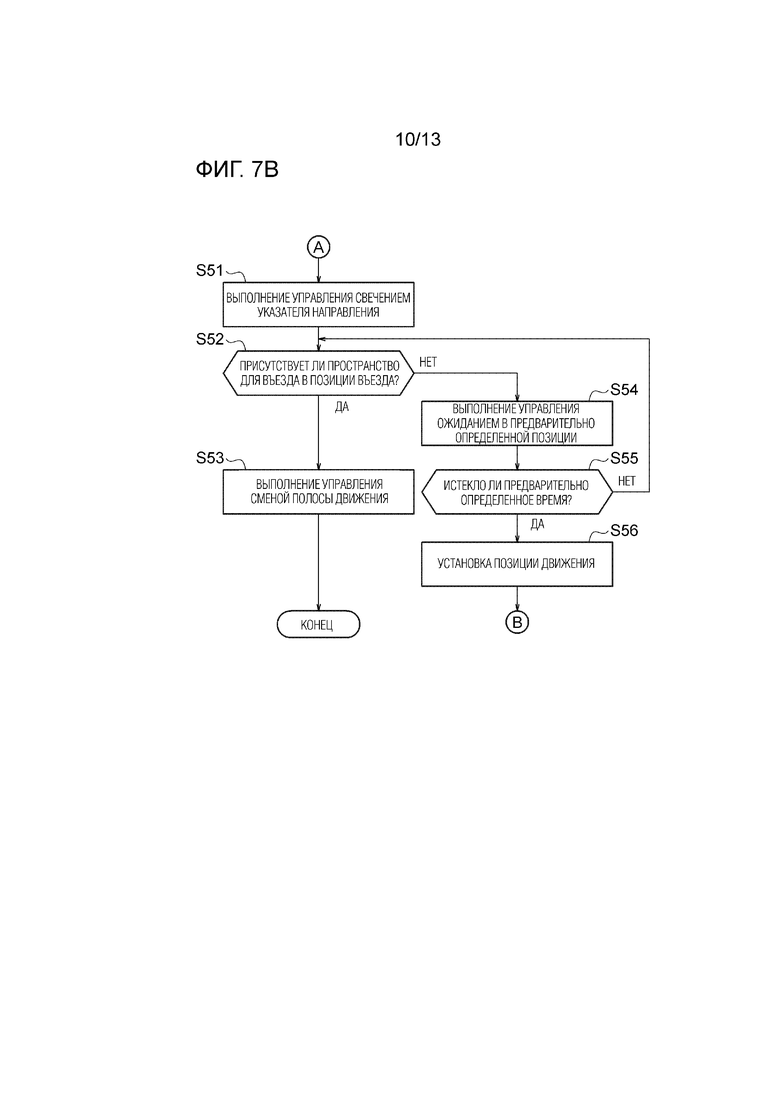
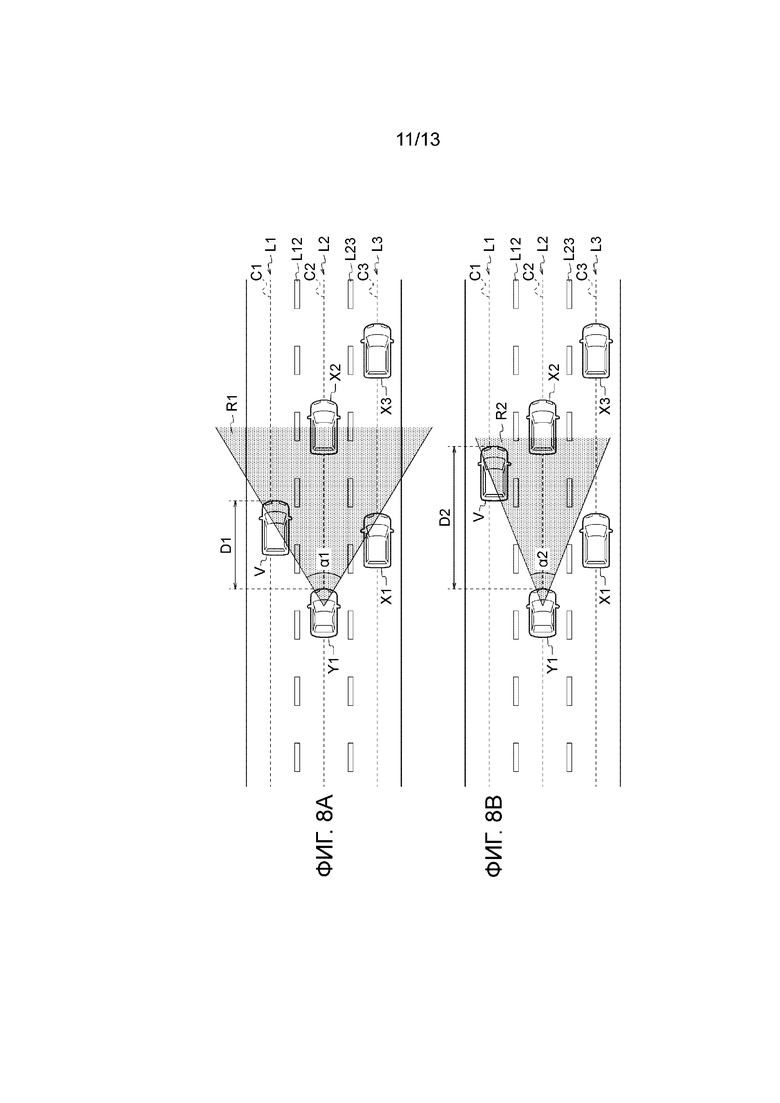
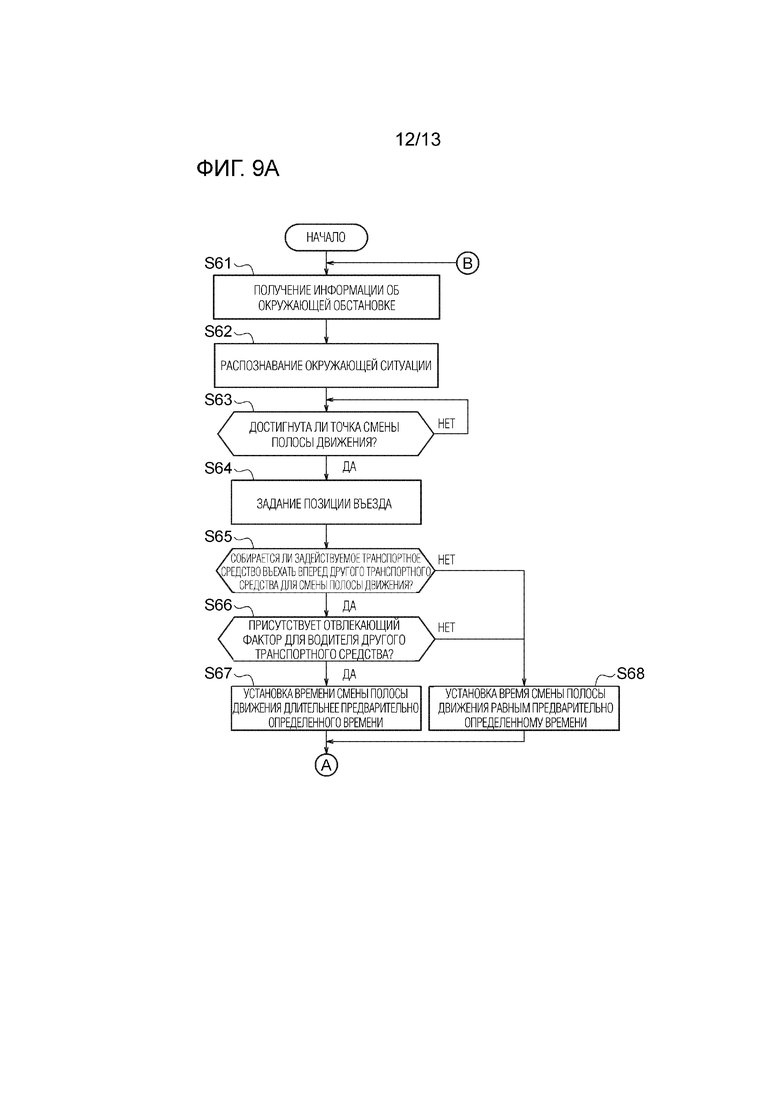

Изобретение относится к способу управления транспортным средством. Предлагается способ управления транспортным средством, выполняемый процессором, выполненным с возможностью осуществлять смену полосы движения задействуемого транспортного средства. При этом способ содержит этапы, на которых получают информацию об окружающей обстановке задействуемого транспортного средства посредством датчика, определяют, присутствует ли фактор, который может быть отвлекающим для водителя другого транспортного средства, когда задействуемое транспортное средство въезжает спереди этого другого транспортного средства, движущегося по второй полосе движения. Способ также содержит этап, на котором устанавливают время смены полосы движения, необходимое для того, чтобы задействуемое транспортное средство сменило полосу движения, причем время смены полосы движения является более длительным при определении присутствия упомянутого фактора, чем при определении отсутствия упомянутого фактора, управляют позицией движения задействуемого транспортного средства на первой полосе движения в течение времени смены полосы движения. Устройство управления транспортным средством содержит устройство, получающее информацию об окружающей обстановке задействуемого транспортного средства, и контроллер. Достигается повышение безопасности водителей. 2 н. и 9 з.п. ф-лы, 14 ил.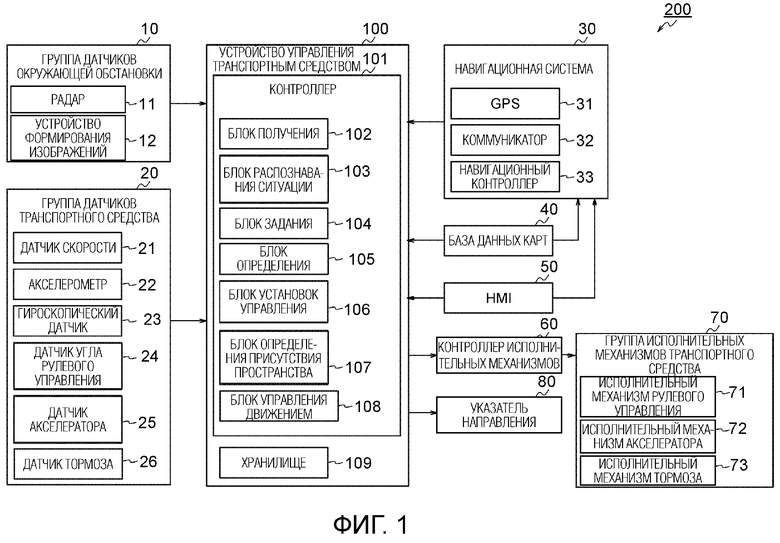
1. Способ управления транспортным средством, выполняемый процессором, выполненным с возможностью осуществлять смену полосы движения задействуемого транспортного средства, при этом способ содержит этапы, на которых:
получают информацию об окружающей обстановке задействуемого транспортного средства посредством датчика, предусмотренного в задействуемом транспортном средстве;
определяют, присутствует ли фактор, который может быть отвлекающим для водителя другого транспортного средства, когда задействуемое транспортное средство въезжает спереди этого другого транспортного средства, движущегося по второй полосе движения, для смены полос движения с первой полосы движения на вторую полосу движения, смежную с первой полосой движения;
устанавливают время смены полосы движения, необходимое для того, чтобы задействуемое транспортное средство сменило полосу движения, причем время смены полосы движения является более длительным при определении присутствия упомянутого фактора, чем при определении отсутствия упомянутого фактора;
управляют позицией движения задействуемого транспортного средства на первой полосе движения в течение времени смены полосы движения.
2. Способ управления транспортным средством по п.1, дополнительно содержащий этап, на котором устанавливают по меньшей мере одно из первого времени, второго времени, третьего времени и четвертого времени, включенных во время смены полосы движения, более длительным, чем при определении отсутствия упомянутого фактора, при этом
первое время представляет собой время, когда загорается указатель направления задействуемого транспортного средства,
второе время представляет собой время, необходимое для перемещения задействуемого транспортного средства на сторону второй полосы движения относительно центральной линии первой полосы движения вместе с направлением движения задействуемого транспортного средства,
третье время представляет собой время для движения задействуемого транспортного средства при нахождении на стороне второй полосы движения по отношению к центральной линии, и
четвертое время представляет собой время, необходимое для перемещения задействуемого транспортного средства на вторую полосу движения с первой полосы движения.
3. Способ управления транспортным средством по п.1 или 2, дополнительно содержащий этапы, на которых:
вычисляют вероятность взгляда, что водитель будет глядеть на упомянутый фактор; и
устанавливают время смены полосы движения тем более длительным, чем выше вероятность взгляда водителя.
4. Способ управления транспортным средством по п.1 или 2, дополнительно содержащий этапы, на которых:
вычисляют степень влияния упомянутого фактора на функционирование упомянутого другого транспортного средства и
устанавливают время смены полосы движения тем более длительным, чем выше степень влияния упомянутого фактора.
5. Способ управления транспортным средством по п.1 или 2, дополнительно содержащий этапы, на которых:
вычисляют вероятность взгляда, что водитель будет глядеть на упомянутый фактор;
вычисляют степень влияния упомянутого фактора на функционирование упомянутого другого транспортного средства и
устанавливают время смены полосы движения тем более длительным, чем выше значение умножения, полученное посредством умножения вероятности взгляда водителя на степень влияния упомянутого фактора.
6. Способ управления транспортным средством по п.5, дополнительно содержащий этапы, на которых:
вычисляют, при определении присутствия множества упомянутых факторов, для каждого из этих факторов, вероятность взгляда водителя, степень влияния упомянутого фактора и упомянутое значение умножения;
устанавливают время смены полосы движения тем более длительным, чем выше любое из суммы вероятностей взгляда водителя, суммы степеней влияния упомянутых факторов и множества значений умножения.
7. Способ управления транспортным средством по любому из пп.1-6, в котором упомянутый фактор включает в себя по меньшей мере одно из отображения сигнала светофора, места дорожно-транспортного происшествия, указателя направления во время свечения, формы дороги, включающей в себя первую полосу движения и вторую полосу движения, транспортного средства экстренной службы, звука автомобильной навигации, установленной на упомянутом другом транспортном средстве, экстренного предупреждения о землетрясении, поведения транспортного средства и формы или цвета транспортного средства.
8. Способ управления транспортным средством по любому из пп.1-7, в котором
упомянутый фактор представляет собой впереди идущее транспортное средство, идущее впереди упомянутого другого транспортного средства на третьей полосе движения, и
третья полоса движения представляет собой полосу, которая является смежной со второй полосой движения и которая расположена на противоположной стороне от первой полосы движения.
9. Способ управления транспортным средством по п.8, дополнительно содержащий этапы, на которых:
получают информацию о скорости транспортного средства впереди идущего транспортного средства от датчика, обнаруживающего состояние окружающей обстановки задействуемого транспортного средства;
сравнивают скорость транспортного средства задействуемого транспортного средства со скоростью транспортного средства впереди идущего транспортного средства; и
когда разность скоростей между скоростью транспортного средства задействуемого транспортного средства и скоростью транспортного средства впереди идущего транспортного средства находится в пределах предварительно определенного диапазона, устанавливают время смены полосы движения более длительным, чем когда разность скоростей находится за пределами этого предварительно определенного диапазона.
10. Способ управления транспортным средством по любому из пп.1-9, дополнительно содержащий этапы, на которых:
оценивают фактическое поле обзора водителя на основе по меньшей мере одного из скорости транспортного средства упомянутого другого транспортного средства, степени загруженности дороги, включающей в себя первую полосу движения и вторую полосу движения, формы дороги, информации о погоде, информации о времени и навыка вождения водителя,
устанавливают начальную позицию для начала выполнения управления позицией вождения, так чтобы расстояние впереди задействуемого транспортного средства по отношению к упомянутому другому транспортному средству становилось тем больше, чем уже становится фактическое поля обзора; и
начинают выполнение управления позицией движения, когда задействуемое транспортное средство достигает этой начальной позиции.
11. Устройство управления транспортным средством, содержащее:
устройство, получающее информацию об окружающей обстановке задействуемого транспортного средства; и
контроллер, выполненный с возможностью осуществлять смену полосы движения транспортного средства, при этом контроллер содержит:
блок получения для получения информации о транспортном средстве от устройства;
блок определения, определяющий, присутствует ли фактор, который может быть отвлекающим для водителя другого транспортного средства, когда задействуемое транспортное средство меняет полосы движения с первой полосы движения на вторую полосу движения, смежную с первой полосой движения, чтобы въехать спереди этого другого транспортного средства, движущегося по второй полосе движения, в соответствии с информацией об окружающей обстановке задействуемого транспортного средства;
блок установки, устанавливающий время смены полосы движения, необходимое для того, чтобы задействуемое транспортное средство сменило полосу движения, причем время смены полосы движения является более длительным, когда блоком определения определено присутствие упомянутого фактора, чем когда определено отсутствие упомянутого фактора; и
блок управления движением, управляющий позицией движения задействуемого транспортного средства на первой полосе движения в течение времени смены полосы движения.
| JP 2018197966 A, 13.12.2018 | |||
| JP 2018160173 A, 11.10.2018 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2015 |
|
RU2668138C1 |

